
脚手架高空作业危险行为识别方法研究
2023-11-27 10:51牛文良张鹏峰
科学技术创新 2023年27期
牛文良,张鹏峰
(甘肃第七建设集团股份有限公司,甘肃 兰州)
引言
在建筑工地中,为防止脚手架跌落事故的发生,建筑施工单位出台多项关于脚手架高空作业安全管理的政策和规章制度,但根据相关工作的实施进展可知,现有的政策并未能在施工现场发挥预期的约束效果[1]。
根据大部分工程方的反馈,现阶段,亟需一种及时、有效、准确、快速的方法,进行脚手架作业过程的检查,通过此种方式,提高建筑工程项目的安全生产水平。然而,当前工地现场对于脚手架高空作业的安全检查,通常都是采用人工观察的方法实行,监理人员或安全员会每过数周或每月,向上递交一份书面检查报告。但此种检测方法效率较低,并且很难实现施工现场全场景、全天候的脚手架高空作业安全检查,所以不能及时发现并阻止脚手架安全事故的发生[2]。另外,基于文本的书面安全报告往往不能充分地反映出施工现场的安全危害,造成了许多安全隐患,极易引起脚手架跌落事故。为实现对脚手架安全事故的控制,下述将基于现代化技术的应用,进行高空作业危险行为的识别设计,以此种方式,避免施工现场由于脚手架操作不规范造成的安全事故发生。
1 脚手架高空作业危险行为识别方法研究
1.1 识别算法设计
在此次研究中,为实现对脚手架高空作业危险行为的识别,引入ST-GCN 图卷积网络算法作为识别算法的基础[3]。在该算法当中,可首先建立一个脚手架高空作业人员的人体骨骼序列,如图1 所示。

图1 脚手架高空作业人员的人体骨骼序列
图1 中的结构是由Openpose 提取的一系列人体骨骼在时间序列上的排序得到的。骨架图当中的每一个点均与脚手架高空作业人员的关节相对应[4]。各个关键均由两种形式的边交接,其中一种为空间边,另一种为时间边。在该构造的基础上,从空间维度和时间维度上获取后续危险行为识别所需信息[5]。与某一个像素点x 为例,其图像的二维卷积结构当中,假设输入特征图为fin,在经过K×K的卷积核处理后,该特征的输出可写作:
式中:fout(x)代表特征输出;p 代表采样函数;h 代表采样像素点x 的领域范围;w 代表权重函数。在时空域上,图的卷积不仅要有某种空间结构,还要有某种时间结构[6]。文中给出的采样函数和权重函数都是仅反映了空间数据的结构性特征,而没有反映其时变性。然后,通过再一次求解标志组间的映射函数,获得了空间- 时间关系图的空间- 时间关系。
1.2 脚手架高空作业人员行为骨骼信息采集
在确定脚手架高空作业危险行为识别算法后,还需要结合采集到的样本数据,对算法进行训练,确保最终识别结果的精度。在对脚手架高空作业危险行为识别时,人员行为与运动的灵活多变,加之脚手架高空作业工作环境的复杂多变,以及工程中人员的运动与运动易受遮挡,传统二维图像往往很难反映出工程的全貌。同时,建筑活动是一个不断变化的过程,仅采用一幅图像很难对其进行完整的动态信息。当前,仅利用一种图像数据难以实现对高空作业人员危险行为的识别[7]。人类行为的实质就是骨骼的有规则地运动,而骨骼的各种运动所对应的骨骼的运动模式也各不相同。在各种情况下,如有障碍物或光线干扰时,这种算法都不会受到影响。如果以骨骼联结点为研究对象,以其为依据,抓住骨骼连接点随时间变化的时空变化规律,就能更好地识别出特定的行为[8]。为此,本课题提出以人体骨骼为基础,通过对人体骨骼的关键部位信息的挖掘,构建人体骨骼的行为特征库,实现对人体骨骼的危险行为识别与辨识。对人体骨骼点信息的采集,可结合Openpose,按照图2 所示流程进行。

图2 基于Openpose 人体骨骼点信息采集
在此基础上,实现了人体连接节点的连接,并对PAFS 进行解码。首先,采用不极大值消减方法,寻找出一组有可能关联的结点,并将其组合为一组骨骼节点。最后,将多用户搜索问题转化为二进制图匹配问题,利用匈牙利(Hopper)算法对关联连接节点进行优化匹配。基于Openpose 模型,利用数据集训练得到,在训练前需要对图像当中的人体骨骼进行标记。在进行对算法的训练时,针对每一个Stage 输出的特征图,都可以结合标注的标签进行相应的损失值计算。图3 为经过训练后形成的人体骨架示意。
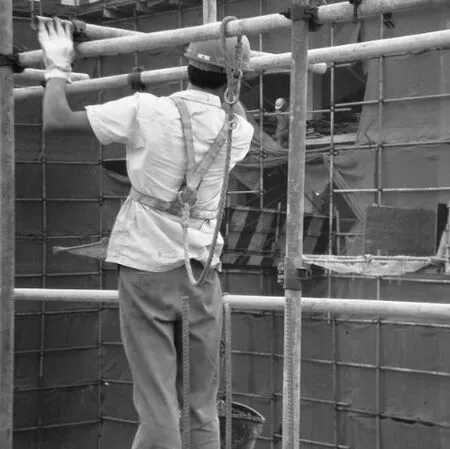
图3 训练后形成的人体骨架示意
在利用Openpose 从高空作业图像或视频中采集多人骨骼点信息时,不需要考虑周围环境的影响,且方便高效。在从视频中获取脚手架高空作业人员行为骨骼信息时需要考虑视频格式问题。对采集的视频数据,需要先进行格式上的统一,再利用视频剪辑软件载入获取到的视频数据,并将其统一以mp4 的格式导出,要求视频的分辨率为1 080 p,编码为H.264,帧率应设置为30 fps。为方便显示,对生成的图像信息的显示效果进行归一化处理,将其效果评分控制在0~1 范围内,越接近1,则说明显示内容越准确,对人体骨骼关节点的还原度越高;越接近0,则说明显示内容越不准确,对人体骨骼关节点的还原度越低。对所有获取到的人体骨骼数据信息进行划分,大致可分为三类,分别为:normal construction(正常施工)、High altitude exploration(高空探身)、Scaffold climbing(脚手架攀爬)。
1.3 危险行为识别模型训练与识别
结合采集到的脚手架高空作业人员行为骨骼信息,对危险行为识别模型进行训练。表1 中记录了危险行为识别模型训练的环境配置条件。
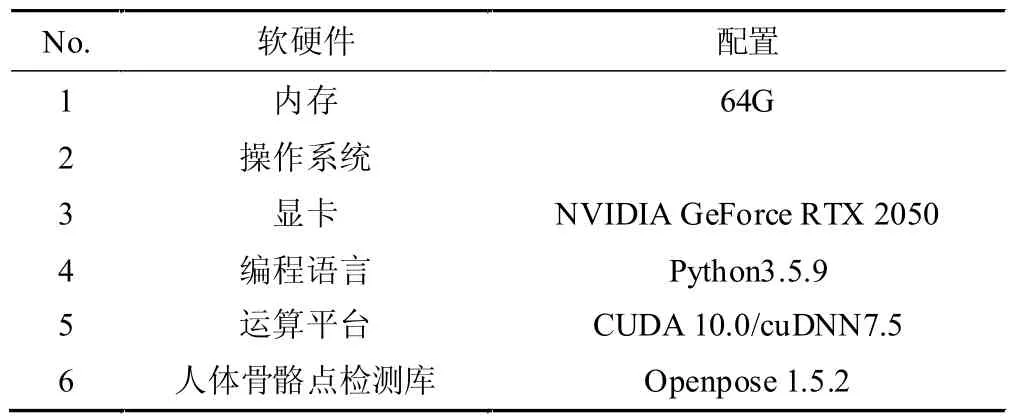
表1 危险行为识别模型训练的环境配置条件
在训练时,在前期工作中,将使用Kietics-skeleton数据集,其中包括每一帧的骨骼连接节点的坐标信息,以及每一帧的预测得分。然而,ST-GCN算法模型中,其输入为连接节点的联合坐标矢量,无法使用ison 格式的Kinetics-skeleton 数据集,需要转换数据格式。将Kinetics-skeleton 数据集按照9:1 的比例,分成了两个部分,分别是Kinetics train 和Kinetics val 文件夹,文件夹中保存着每段视频各帧图像的姿态和行为标签。在此基础上,将Kinetics-skeleton 数据集转化为npy 与pkl 两种格式,并与相应的算法相结合,实现了对上述识别算法的模型训练。
在训练的过程中,可将行为识别数量设置为3,将输入通道数量设置为3、将批尺寸设置为64、将初始学习率设置为0.1。通常情况下,完成300 轮的训练后,其学习率会降低到0.000 01,而识别准确率可以稳定在91%上下,此时说明危险行为识别模型训练完毕。
2 方法测试与结果讨论
2.1 测试准备
在众多的施工现场安全事故中,高空坠落是最常见事故形式之一,高空作业安全事故数量占据了超过一半的建筑安全生产事故,脚手架是建筑工地临时搭建的运输支撑装置,大部分高空作业都是在脚手架支撑的基础上进行的。随着脚手架应用的日益广泛,高空坠落事故已成为一种较为常见的事故。因此,加强对此类事故的安全管理是十分必要的。
为实现对脚手架高空作业中安全问题的全面控制,政府与有关单位对高度超过2 m 的脚手架作业进行了明确的要求,并规范了脚手架的安全生产。虽然有明文规定,但仍有部分施工人员因担心系上安全带后影响操作,而不愿意使用或错误使用。除规范脚手架高空作业行为,施工单位也可以通过良好的咨询交流、合理的安全培训,提高施工人员的安全意识,但通过转变基层人员认知从而控制安全事故发生频次的过程是一个十分漫长的过程。因此,本文开展了此次研究,下述也将对研究的方法与设计的成果进行检验与测试。测试前,按照表2,进行测试平台的配置。

表2 测试硬件平台配置
为满足测试环境的配置需求,选用Windows 10 系统作为硬件设备的运行系统,系统内存为32G,在此过程中,考虑到计算机中不同硬件之间的适配度问题,可在测试环境中搭配使用不同类型的高性能图像处理器,确保对前端反馈数据的及时处理。
在上述内容的基础上,按照表3,进行软件平台的配置。

表3 测试软件平台配置
2.2 施工现场视频与图像采集处理与识别结果
通过对现场采集到录像的初步筛选,选取其中15段录像,作为施工现场脚手架高空作业危险行为检查的重点,同时,设置脚手架高空作业工人的不同行为,包括:正确佩戴安全帽、未佩戴安全帽、正确系安全带、未系安全带等,在进行识别方法的测试前,需要先对采集的视频与图像进行预处理,统计图像、视频的帧大小、时长、帧率。处理规范如表4 所示。

表4 施工现场视频与图像采集处理规范
按照上述方式,对现场未佩戴安全帽、未系安全带等工人危险行为进行识别与检测,以某区识别结果为例,如图4 所示。

图4 脚手架高空作业中未系安全带危险行为的识别结果
从图4 中可以看出,此名工人在脚手架上进行高空作业时,仅佩戴了安全帽、携带了悬挂绳,但并未按照规范系安全带。根据实验要求“识别未系安全带危险行为”与图4 所示的识别结果,可以证明本次设计的方法在实际应用中,可以实现对现场多种危险行为的智能识别。
结束语
脚手架高空跌落事故频发,许多现场安全事故都与脚手架高空作业危险行为有关。通过对近三年高处坠落事故直接成因的统计,可以发现,导致高处坠落事故的主要因素是安全带的不合理使用以及高处脚手架存在的安全隐患。而在脚手架上工作的时候,施工人员没有系好安全带,或者没有合格地使用好安全带,冒险探身,这些都是高空危险行为的表现。如果能够及时地对脚手架高空作业中的危险状态进行分析和识别,就可以降低并控制脚手架高处坠落事故的发生。为落实此项工作,本文开展了此次研究,在完成对此方法的设计后,为检验该方法能否在应用中实现对脚手架高空作业中多种危险行为的精准识别,选择某工地作为试点,展开了对应的测试,根据测试的结果与图4 中的内容可以看出,本次设计的方法可以实现对脚手架高空作业中未系安全带危险行为的精准识别,因此,可以尝试在后续工作中,加大对该方法在工地与工程项目现场的应用,通过此种方式,为脚手架高空施工作业提供全面的技术保障。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
建材发展导向(2021年20期)2021-11-20
建材发展导向(2021年6期)2021-06-09
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
电子制作(2018年19期)2018-11-14
疯狂英语·新读写(2017年1期)2017-04-06
小学生作文(低年级适用)(2017年12期)2017-02-06
新课程研究(2016年2期)2016-12-01
工业设计(2016年6期)2016-04-17
汽车文摘(2015年11期)2015-12-02
