基于有限时间算法的风机最大功率跟踪控制
2023-11-27 13:19:54张正夫郝万君
苏州科技大学学报(自然科学版) 2023年4期
张正夫,郝万君,吴 宇,曹 选
(1.苏州科技大学 物理科学与技术学院,江苏 苏州 215009;2.苏州科技大学 电子与信息工程学院,江苏 苏州 215009)
近些年来,我国对经济的高质量发展提出了更高的要求,结合“碳达峰、碳中和”的能源大背景,风电机组的装机容量随之不断地增加。风电作为一种重要的清洁能源,在中国乃至世界的能源市场中的占比越来越高[1-2]。因此,国内外的科研人员开始广泛关注风电机组运维的关键技术。由于当风速变化时,风力机的输出功率也会随之而变化,同时存在一个最优转速能够使风力机在该风速下输出最大功率。因此,当风电机组运行在低风速区时,针对其最大功率点跟踪(maximum power point tracking,MPPT)控制策略的研究具有重要意义[3]。但是随着大型风力发电机组系统的复杂度不断增加,各种扰动导致的不确定问题也在不断增加。这使得传统的控制方法应用在最大功率跟踪控制问题上难以得到有效的结果,所以也就无法实现最大限度的风能捕获,无法高效的利用风能[4-5]。为了解决实际应用中的问题,国内外研究人员进行了很多相关研究,设计了不同的非线性控制方法,来解决风机系统耦合性强、非线性化强的复杂问题。
文献[6]将蚁群算法应用于风力机组电机速度控制中比例积分控制器的参数优化。该算法具有无需知道感应电机参数即可达到并找到最优参数的优点。但是该算法收敛速度较慢,而且容易陷入局部最优解。文献[7]提出了一种改进的最大功率点跟踪算法,即采用一种基于非线性状态观测器的复合低成本控制器来改善直流电压跟踪。该文献提出的非线性鲁棒控制器考虑了整个系统的动态特性和非线性行为,但未考虑环境的不确定性对系统的影响。文献[8]提出了两种基于最优分数高阶快速终端滑模控制的变速风力机风能转化最大化和机械负荷最小化的非线性控制方法。通过在最大化能量提取和最小化控制输入之间建立折衷,实现了使用所提出方法的系统的最优条件。但是为了实现这一折衷,应该对风力涡轮机系统的行为进行精确建模。文献[9]将模糊逻辑控制的自适应特性与PI 控制器结构的简单性相结合,设计了自适应PI 控制系统,PI 控制器的参数由基于模糊控制器的监控系统,根据风电机组的运行状态进行实时调整。有效地优化了DFIG 风电机组的性能,以达到最大功率点跟踪。然而,由于系统的强非线性使得该控制策略很难保证系统有较强的鲁棒性,无法很好地解决外界干扰和参数扰动的问题。文献[10]考虑到非线性系统结构和参数的复杂性,采用自适应算法有效地抑制了参数不确定性和外部摄动,而不需要事先知道系统的上界信息。该控制器能够实现有功功率和无功功率的平滑调节。文献[11]提出了一种新的阴阳灰狼优化算法,该算法采用了阴阳对优化启发下的合作与竞争平衡的思想,构造了一个同时具有状态约束和控制约束的动态优化问题,建立了基于智能算法的非线性模型预测控制的完整框架,实现了高效收敛和全局最优。但是算法本质中的种群多样性有待提高。
针对上述不同方法的缺陷,为了使得转速跟踪误差进一步减小,转速跟踪精度进一步提高,风能捕获效率进一步提升,文中提出了一种基于有限时间控制策略达到预设性能的控制方案。引入的新的时变约束函数,将原来的有限时间跟踪控制问题转化为具有跟踪误差延迟约束的问题[12]。增强了系统对未知参数和外界扰动的鲁棒性。实验设计了阶跃突变风速的仿真实验和基于真实数据的连续渐变风速的仿真实验,通过对仿真结果的分析可以看出,设计的控制策略能够有效消除系统的抖振现象,外界干扰与风速随机变化时,能够很好的追踪最大功率点。
1 风力发电机组模型
1.1 空气动力系统模型
风力涡轮机捕获的气动功率(转子功率)Pr可表示为
其中R 是风电机组的风扇半径;V 是有效风速;Cp(β,λ)是风机功率转换效率,代表着风机从风能中获取能量的能力;β 是桨距角;λ 是叶尖速比。叶尖速比的表达式如下
风力涡轮机的转子的机械转矩Ta为
其中,ωr为风轮转子转速;ρ 是空气密度;Cp(β,λ)是风能利用系数,可用式(4)与式(5)计算[13]
其中λ 可由以下式子确定
1.2 传动系统模型
如图1 所示,风机的传动系统是一种双质量结构,它是由齿轮箱将高速轴与低速轴连接起来。根据图1 可知,在转子侧,机械转矩Ta以ωr的速度驱动风机的转子旋转。转子上的制动功能由低速扭矩Tls提供。在发电机侧,发电机转矩由高速转矩Ths驱动,而电磁转矩Tg的作用是制动发电机。此外,连接高速轴与低速轴的齿轮箱能够通过改变传动比Ng来改变转子转速,进而改变发电机的转速ωg。为了简化系统的数学模型方便计算与仿真,可以将刚性轴的阻尼系数和扭转系数忽略,此时系统简化为一个单质量块模型,其数学表达式[14]为
其中,J=Jr+Ng2Jg,Ng为齿轮箱的传动比;Tg为发电机转矩;Jr和Jg分别为低速轴和高速轴的转动惯量。
针对式(6)进行控制分析。最后,发电机的输出功率可以给出如下公式
1.3 风力发电机模型
该研究采用的是双馈异步发电机,为了简便计算,文中采用一阶线性模型来表示其电磁部分[14]
其中,τg为转矩系数;Tg,ref为发电机转矩给定值。
2 风力机MPPT 有限时间预设性能轨迹跟踪方法设计
2.1 风电系统的控制目标
当风速低于额定风速时,风电机组工作在低风速区,此时的主要控制目标是尽可能的捕获风能。由于风轮的机械特性不同,这种控制方法可以根据风速的变化和叶尖速比的最优值确定。由式(4)可知,当Cp(β,λ)处于最大值时,风电系统捕获的风能效率最高。而Cp(β,λ)是以λ 和β 为变量的函数,在桨距角β=0°,并且保持不变的情况下,风轮转速ωr可以通过发电机转矩Tg的调节而间接的改变,从而使其跟踪最佳叶尖速比λopt的效果更好,进而得到最大风能利用系数Cp,max。根据研究可知,当β=0°,λ=λopt=8.13 时,Cp可以取得最大值[15]。
风力发电机根据风速的不同可以有三种基本的运行模式[16-17],如图2 所示,其中Vmin为接入风速,Vrated为额定风速,Vmax为最大风速。Prated是发电机的额定功率。当风速低于Vmin时,无法从风力中提取有效功率。在区域2 时,采取MPPT 控制,驱动涡轮机尽可能地从风力中提取能量,即当风速在Vmin和Vrated之间变化时,Pa应保持在其最优值Pamax。而在区域3时,控制器的主要任务是通过改变桨距角β 来保持发电机工作在功率额定值处,以避免风轮转子超速,并确保整个风力发电系统的安全。
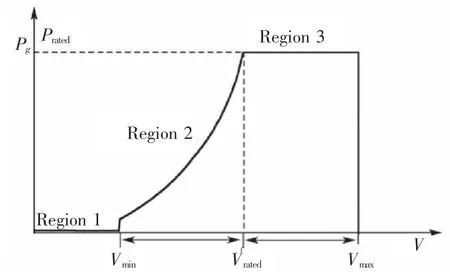
图2 风力发电机组的工作区
文中考虑风机工作在区域2 时的控制任务。由式(1)定义风力机的最大功率提取值Pamax为
其中Cpmax为Cp的最优值,根据文献[18]可知,桨距角β 始终设为0,系统需要保持在最优运行点λopt,以获取风力的最大功率Pamax。回顾式(5)可知,ωr应随风速的变化而变化,以求得最佳叶尖速比λopt,因此,最佳转子转速ωropt可表示为
由模型(6)可知,发电机等效电磁转矩Tg可以改变转子转速的动态特性。因此,该研究的控制目标是通过设计合适的控制律Tg,使转子转速ωr跟踪其最优估计值ωropt。
所以,需要定义跟踪误差为
因此,控制目标转化为消除跟踪误差e。由于风速随机变化,系统未知输入扰动非零且不匹配,所以模型(6)提出了一个具有未知参考输入和严重外部干扰的非线性不确定控制问题。
2.2 一阶滑模控制器与比例积分微分控制器
一阶滑模控制方法作为传统的控制方法具有很多优势,主要表现在鲁棒性强,以及对外部扰动不敏感等方面[19]。同时,其特有的抖动问题也是滑模控制必须要面对与解决的问题之一。PID 控制作为最经典的控制方法之一,控制设计相对简单,所以这里与一阶滑模控制方法一起,直接给出其控制器的数学表达式,为后文的对比分析实验做准备[20-21]。
根据式(11)定义的角速度跟踪误差e 为e=ωr-ωropt,其中,ωropt为最优估计值。
所以PID 控制器的形式设计为
一阶滑模控制器的形式设计为
其中,α 为一阶滑模控制器参数,α=1;k 为指数趋近率参数。
2.3 有限时间预设性能控制器设计
2.3.1 时变约束函数设计
由于实际风电系统中,函数的初始值不能为无穷,所以将初始值设置为β0。基于预设定的时间T 和给定的精度ε,将时变约束函数β(t)构造为
需要注意的是变约束函数为单调递减的函数,它的终值为精度ε。对时变约束函数β 求导可得
其中0<T<∞和0<ε<∞表示用户指定的系统稳定的时间和系统的稳态跟踪精度,p 是满足2p>n+1 的正整数,以确保β(i)(t)(i=0,1,2,…,n)的连续可微性,这里的n是系统的阶数。
根据式(11)定义的跟踪误差e=ωr-ωropt。在区间t∈[0,T]上,β(t)从无穷单调递减到ε,对于在区间t∈[T,∞]上,β(t)保持常数ε 不变。为了可以达到预期的MPPT 跟踪目标,要满足以下延迟跟踪误差约束
结合式(14)中给出的对标量函数β(t)的定义,可以从式(16)得到
其中t≥T。
即是,如果能确保式(16)是约束的,那么跟踪误差e 则可以在稳定时间T 内收敛到区域Ω={e∈R:|e|<ε}中。式(4)中的约束边界β(t)是与建立时间T 和跟踪精度ε 有关的,这也将MPPT 的稳定性与跟踪误差约束问题联系在了一起。约束边界β(t)中的参数T 和ε 都可以由用户自行设定,所以建立时间和跟踪精度可以预先指定为系统的期望值。在系统设定的初始时间,约束边界β(t)被设计为无穷大,这有助于实现设定时间之后的全局跟踪效果。
2.3.2 跟踪误差变换
注意,现有的大多数约束控制方法只能处理约束边界始终有界的情况(约束从系统运行开始就存在),这里式(4)中的延迟约束边界在初始时间是无限的(它在初始时间是无约束的),因此需要开发新的约束控制方法。
根据式(11)定义
其中c>0,β(t)-e 和β(t)+e 分别表示跟踪误差到约束边界β(t)和-β(t)的距离。然后,基于函数r(t)构造一个新的复合函数h(r(t)),将r(t)的值映射到区间(0,1],如下所示
其中,a>0 是使用者可以自己设定的安全距离。此外,由于式(19)中的2p>n+1,所以当k=1,2,…,n时,得到
由于公式(19)是一个分段函数,当r(t)>a 时,h(r(t))=1,为常数;当0<r(t)≤a 时,由前文可知,r(t)显然为光滑函数,所以h(r(t))=1-(r(t)/a-1)2p也为光滑函数。所以函数h(r(t))在分段点a 的取值是否合适,是公式(19)这个分段函数在整个定义域上光滑的充分条件。当t>T 时,从β(t)=ε 和式(18)中r(t)的定义可以看出r(t)≤cε2。在文中,选择a=cε2,这个值只是其中一个可能的选项,但不是一个关键的选择,是为了保证在t>T时r(t)<a。
为了进行控制设计,引入跟踪误差的转换
可知,当且仅当e=0 时,z(t)=0;当e→β(t)或e→-β(t)时,z(t)→∞;以及当r(t)>a 时,系统在安全区域内运行。结合式(19)可以看出,当h(r(t))=1,此时z(t)=e。在这种情况下,对跟踪误差e 没有施加特殊的约束变换,从而避免了β(t)在初始时刻无限的现象。
2.3.3 有限时间预设性能控制器设计
在此小节中,针对式(6)所表示的模型与式(11)所定义的跟踪目标,设计一种跟踪控制率
其中x,u∈R,并且函数f(t,x)满足式子|f(t,x)|≤δφ(x),其中δ≥0 是一个未知常数,φ(x)≥0 是一个已知的连续函数。
根据式(11)定义的跟踪误差e=ωr-ωropt,与式(21)的误差变换公式,初始模型式(22)可以转换为
其中
然后可以得到控制器公式为
其中B=-Ng/J。
3 仿真结果及分析
为验证文中所提控制策略能否在风电机组上有效追踪最大功率,该研究采用的研究对象模型是5 MW的风电机组,该模型是美国国家可再生能源实验室(National Renewable Energy Laboratory,NREL)开发的,具体参数见表1。

表1 风电机组参数表
有限时间预设性能控制器参数c=1,a=0.1,p=1,T=1,ε=0.1,β0=1,k1=2。比例积分控制器的参数Kp=150 000、KI=10 000、KD=100 000;一阶滑模控制器参数α=1;设计的指数趋近律参数为k=1。
为证明文中所提的控制策略的有效性和可行性,根据风速的不同变化形式,采取两种不同的仿真方案:一种是阶跃突变风速仿真;另一种是自然随机风速仿真。通过对PID 控制、一阶滑模控制和有限时间预设性能控制3 种控制策略进行仿真,横向对比它们的控制性能。
3.1 阶跃突变风速仿真
在此次实验中,阶跃突变风速设置为
图3 为阶跃突变风速下,Cp、λ、ωr的相应曲线。
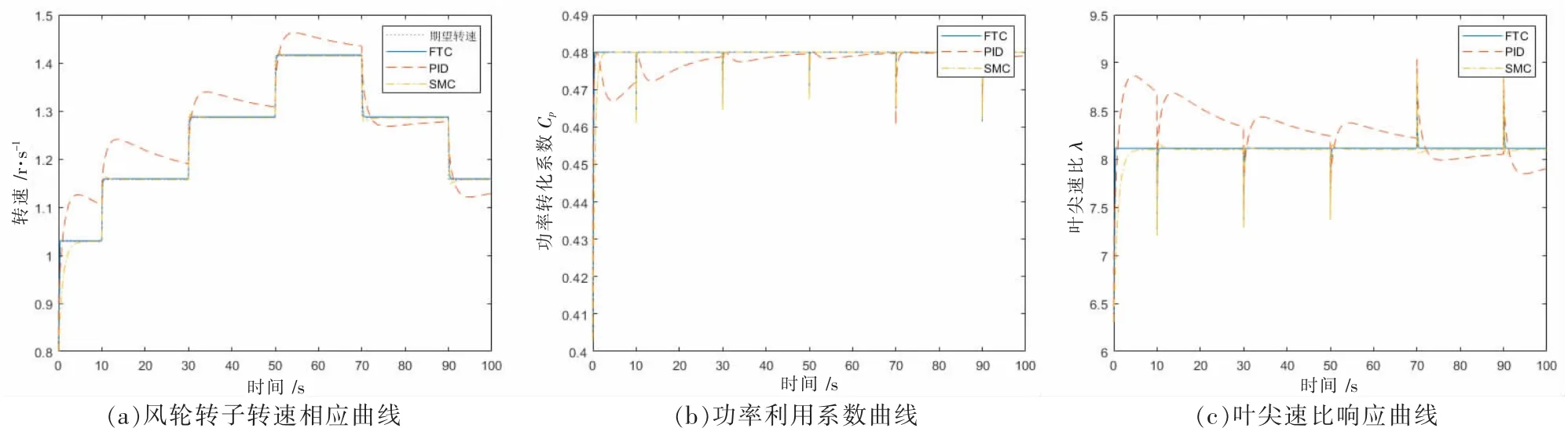
图3 阶跃突变风速下的响应曲线
从图3 中的“功率利用系数曲线”“叶尖速比相应曲线”可见,3 种控制方法得到的Cp和λ 都能满足系统的基本要求。从图3(a)跟踪期望转速图中可以看出,3 种方法都可以快速、有效的控制转子跟踪最优转速。但在风速阶跃变化的瞬间,PID 控制产生了明显的超调量,导致性能曲线抖动不够平缓,容易对风力机的机械装置带来较大的压力。一阶滑模控制的超调量虽然比PID 控制小了很多,但相对于FTC 控制来说仍然比较明显,尤其是在t=0 s,风速突变到8 m·s-1时,一阶滑模控制的快速相应性能不够,上升时间相对较长,损失了不少的控制质量。而文中使用的有限时间控制对每次风速的突变,可以进行十分迅速与准确的跟踪。
3.2 连续渐变风速仿真
为了使仿真更加符合风力机运行的实际工作情况,针对自然随机风速进行仿真,时间长度设置为100 s,风速的大小范围为6.42~11.31 m·s-1,如图4 所示。
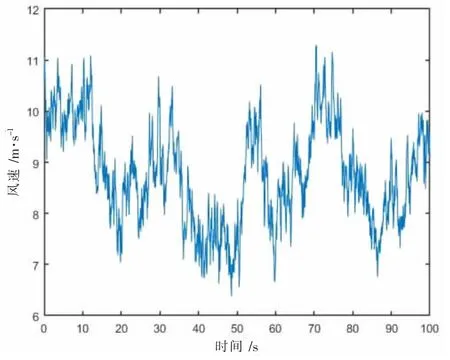
图4 自然随机连续风速曲线
图5 为随机风速下Cp、λ 和ωr的相应的仿真实验曲线。
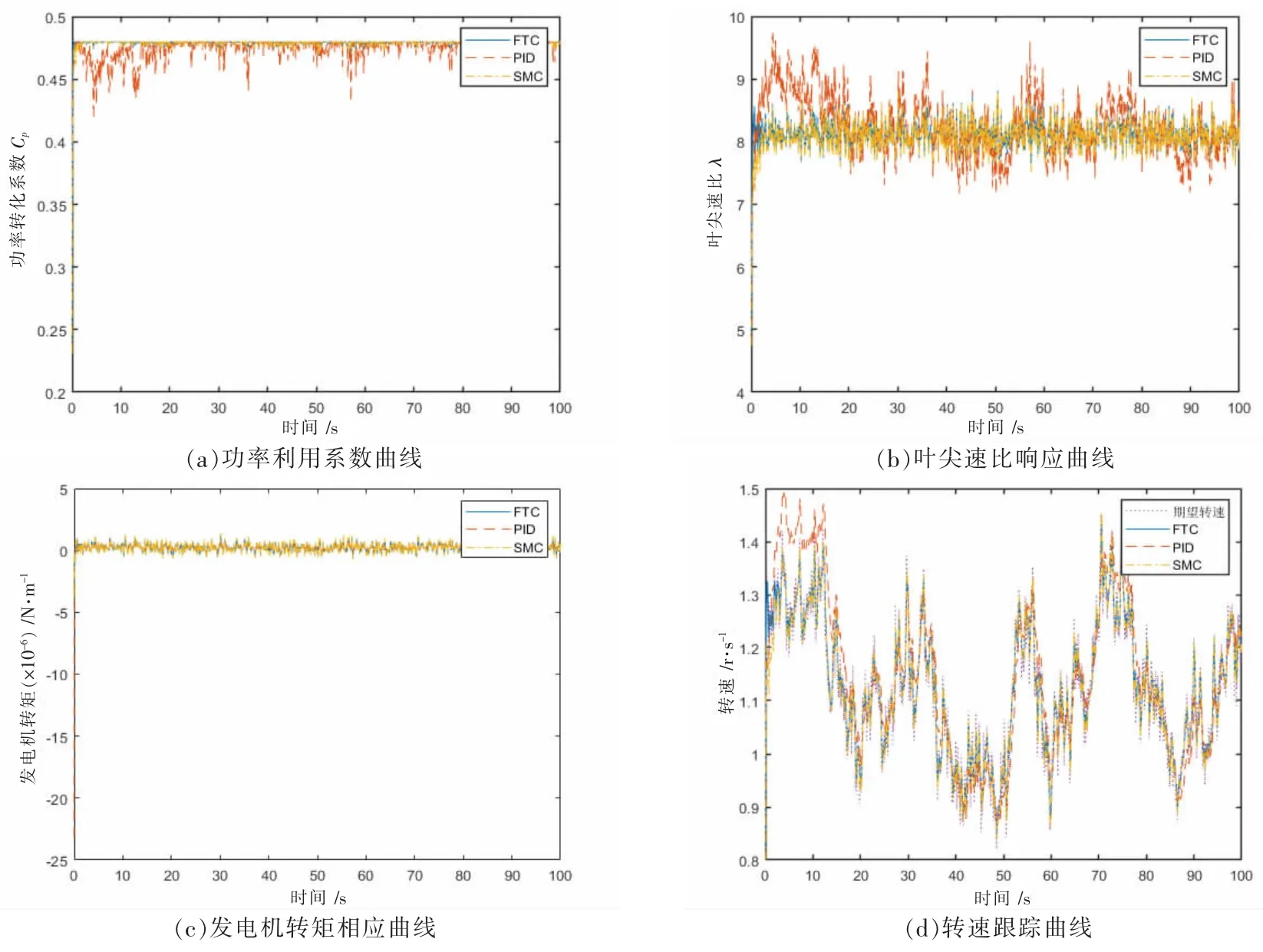
图5 自然随机连续风速下的响应曲线
由图5 可知,当风速为6.42~11.31 m·s-1时,3 种方法都能获得较好的功率转化系数和叶尖速比。其中,从图5(b)中可计算出有限时间控制、比例积分微分控制和一阶滑模控制的平均λ 分别为:8.112 7、8.104 7和7.646 7,所以当风速随时间随机变化时,有限时间控制策略能够将系统的叶尖速比稳定的维持在最佳λ 值(8.13 左右)。为了将3 种控制策略的性能进行更直观的对比,分别计算其跟踪误差绝对值的平均值AVG(|e|)、功率利用系数平均值AVG(Cp)以及转矩曲线波动的标准差SYD(Tg),见表2。

表2 3 种方法的控制性能对比
从表2 中可知,3 种控制策略的AVG(|e|)分别为0.021 5、0.103 7 和0.067 3(由图5(d )计算得出)。因此,文中所提的控制策略能够实现很好的误差跟踪效果。从表2 还看到,有限时间控制策略下的AVG(|e|)与AVG(Cp)的数值表现都比另外2 种控制策略要好。3 种控制策略的功率系数如图5(a)所示,有限时间控制、PID 控制、一阶滑模控制的AVG(Cp)分别为0.479 0、0.460 3 和0.471 7(由图5(a)计算得出)。由此可知,有限时间控制策略的平均功率系数,相对于使用比例积分微分控制策略提高了4.06%,相对于使用一阶滑模控制策略提高了1.55%。图5(c)为发动机转矩曲线,结合表2 可知,有限时间控制策略能够使发电机的SYD(Tg)相对于一阶滑模控制减小5.97%,说明文中提出的方法能够很好地消除常规一阶滑模控制策略的抖振现象。
4 结语
为了尽可能的提高大功率风力发电机组的能量转换效率,抑制和减小发电机工作时的转矩抖振现象,同时还要考虑外部环境的干扰以及风电机组在工作时系统的不确定性,文中设计了基于有限时间控制的最大功率跟踪策略。
通过引入一种新的时变约束函数,将原来的有限时间跟踪控制问题转化为具有跟踪误差延迟约束的问题,优化了有限时间内预设性能的跟踪控制性能。从仿真结果可以看出,文中提出的控制策略能够在参数改变以及外部扰动存在的情况下使跟踪误差快速收敛,从而能够更好地追踪最大功率。研究发现,在降低传动系统的瞬态负载的情况下,所提方法能够有效应对风速的随机变化,并且能够追踪最优功率,同时在抑制转矩抖振和减少风力机载荷等方面优于常规的控制方法。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
四川冶金(2018年1期)2018-09-25 02:39:26
消费导刊(2018年10期)2018-08-20 02:57:02
大电机技术(2017年3期)2017-06-05 09:36:02
军事文摘(2016年16期)2016-09-13 06:15:49
通信电源技术(2016年1期)2016-04-16 04:57:26
智能建筑电气技术(2015年5期)2015-12-10 05:52:30
电机与控制应用(2015年3期)2015-03-01 03:49:59
电力工程技术(2014年1期)2014-03-20 14:19:06