
基于MAS 组网技术的EREV 能量管理策略
2023-11-22 17:37:54张代庆牛礼民李德月吴汪箭
西华大学学报(自然科学版) 2023年5期
张代庆,牛礼民,李德月,吴汪箭
(安徽工业大学机械工程学院,安徽 马鞍山 243032)
增程式电动汽车以经济性高、排放量小等优势,在新能源汽车产业中占据着不可忽视的地位。增程器作为增程式电动汽车的重要组成部分,其与动力电池之间能量的合理分配将直接影响整车经济性及续航里程,因此探索出合理的能量管理策略对提高其能量利用率至关重要。增程式电动汽车的能量管理策略可分为基于规则与基于优化两种类型,基于规则的能量管理策略又分为逻辑门限控制策略和模糊控制策略。如文献[1]提出一种基于逻辑门限的控制策略,通过PID 控制方法减少电能消耗。文献[2]基于模糊控制策略构建了一种模糊能量管理控制器来优化总的等效燃油消耗。基于优化算法的能量管理策略可分为瞬时优化策略和全局优化策略。如文献[3]基于瞬时优化控制策略提出了蚁群算法和连续的广义极小残差法相结合的等效油耗优化策略。文献[4]通过构建基于能量损失函数的动态规划算法提高了增程式电动汽车在不同工况下的燃油经济性。
目前的研究现状显示将分布式人工智能多智能体技术应用到增程式电动汽车能量管理策略的报道尚不多见,而MAS 组网能够通过多个智能体之间的通信和合作完成单个智能体无法完成的工作[5]。基于此,本文将多智能体技术应用到EREV 能量管理系统中,在JADE 平台中搭建MAS组网,采用MACSimJX 实现组网与整车Simulink模型连接,各动力部件智能体根据自身状态选择性地与其他智能体交互,避免因信息集中造成的控制输出时延,并通过仿真协调不同能量源间的功率输出,使增程器、动力电池等动力部件在其最优工作区间作业,实现EREV 能量管理的实时控制。
1 增程式混合动力汽车模型
增程式混合动力汽车在结构上属于串联式混合动力汽车,其主要由增程器、电动机、动力电池构成,结构简图如图1 所示。
1.1 动力电池
动力电池是混合动力汽车的储能装置,在动力系统中起着重要作用。建立动力电池的等效电路Rint模型,如图2 所示,数学计算公式如式(1)所示。

图2 动力电池模型Fig.2 Power battery model
式中:Ubat为电池端电压;Uoc为电池开环电压;Rint为电池的等效内阻;IGen为发电机电流;IM为驱动电机电流。电池总电流为发电机电流和驱动电机电流之和。电池的Uoc和Rint受电池温度的影响而变化,可通过查表法得到。
根据安时积分法对动力电池的SOC 值进行估计。安时积分法的原理如式(2)所示。
式中:SOC 为当前动力电池SOC 值;SOCint为动力电池的初始SOC 值;Ib为电池总电流;Qbat为电池容量。
1.2 驱动电机
驱动电机是EREV 的能量转换和动力输出装置,它根据控制器的转矩命令将动力电池和发电机提供的电能转化为机械能,同时向动力电池反馈电流。驱动电机的效率是电机转矩和转速的函数,可通过查表得出。
驱动电机机械功率计算公式如式(3)所示,输出电流计算公式如式(4)所示。
式中:Pmot为驱动电机机械功率,kW;Tm为驱动电机转矩,N·m;nm为驱动电机转速,r/min。
1.3 增程器
增程器由发动机和发电机两部分机械连接而成,当动力电池SOC 值过低时,由发动机带动发电机对电池进行电能补充。建立增程器实验模型,根据发动机万有特性表即可得到发动机的燃油消耗情况。由于发动机和发电机是机械连接的,所以发动机的转速、转矩和发电机的相同,故增程器的输出电流计算公式为
式中:IGen为增程器/发电机输出电流;Pe为发动机/增程器输出功率;Ubat为动力电池端电压。
1.4 整车动力学
车辆受阻力和牵引力的作用,其动力学方程为
式中:Tm为驱动电机转矩,N·m;i0为主减速器传动比;r为车轮半径,m;ηT为传动系综合效率;f为滚动阻力系数;α为坡道角;CD为空气阻力系数;A为迎风面积;u为车速,km/h;δ为旋转质量换算系数。驱动电机转速可由车速计算得到,如式(7)所示。
式中:nm为驱动电机转速;i0为总传动比。
2 MAS 组网与Simulink 模型的连接
智能体概念起源于对分布式人工智能[6]的研究,在面对复杂问题时,通过多个Agent 相互协调,实现对问题的分配与求解。在MAS 中每个Agent具有外界感知能力和交互协调能力,有独立解决相应问题的能力。当MAS 中某个Agent 因自身原因与外界失去联系时,由于每个Agent 并不需要接收全局信息,其他Agent 依然能够解决问题[7]。
JADE 是多功能智能体开发平台,利用Java 计算机语言编写Agent 框架。在FIPA(the foundation for intelligent physical agents)规范下Agent拥有:1)独立的身份标识,使得在MAS 组网中相互识别;2)通信服务,Agent 可以在消息传递系统中选择要接收的信息;3)多线程服务,Agent 内部支持多种Behaviour()行为,可以和多个Agent 同时活动。
图3 所示为智能体的基本结构,包括感知环节、通信环节、信息状态库、先验知识库以及推理及执行环节。其中:感知环节,实时接收外部信息状态;通信环节,选择性地与MAS 中其他Agents进行交互;信息状态库,将接收到的信息集合成自身状态数据库;先验知识,对Agent 已分配点进行保存,以便下次任务的查询;推理及执行环节,Agent根据自身状态和交互信息,协调分配并发送相关执行命令。

图3 智能体的基本结构Fig.3 Basic structure of agent
MATLAB/Simulink 不支持多线程运行[8],在运行由Java 语言组建的多智能体系统时,有可能使模型系统变得极不稳定,因此利用MACSimJX 作为中间组件,实现多智能体系统和Simulink 模型之间的连接(通信通道)。图4 所示为JADE 驱动程序图。通过S-function 将MACSimJX 添加到Simulink模型中,负责模型和智能体之间的信息传递和建立联系,将信息传递给Agents。
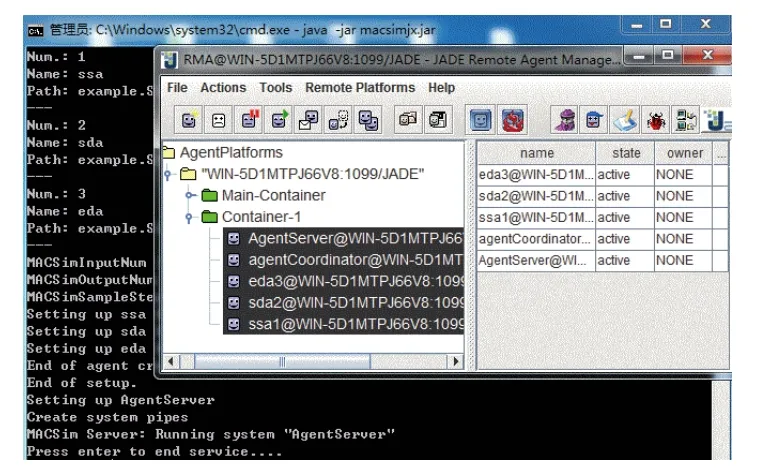
图4 JADE 驱动程序图Fig.4 JADE driver diagram
图5 所示为MACSimjx 简易模型。该模型有3 个幅值、频率均相同的正弦函数,配上相应的增益值作为输入端,MACSimJX 作为客户端负责信息传递。3 个正弦函数分别传入3 个Agents 中进行交互、计算。
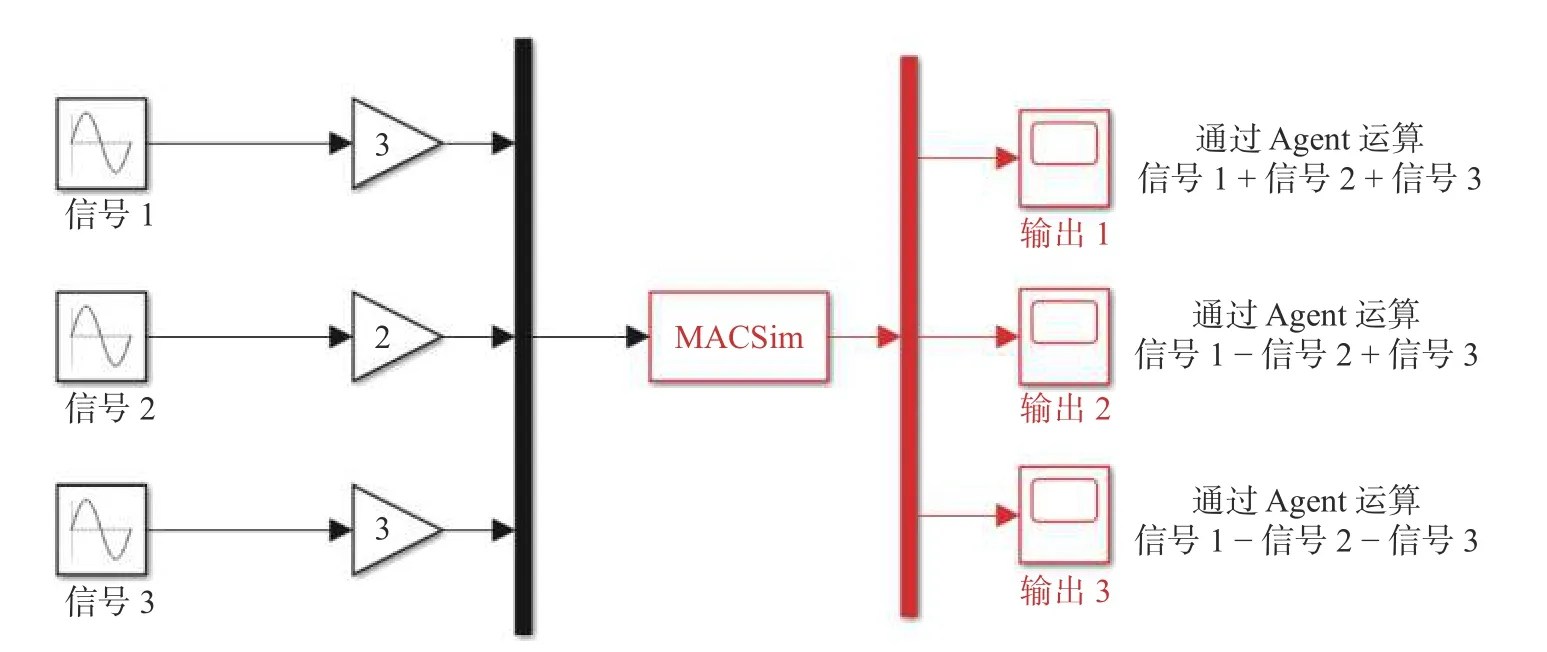
图5 MACSimjx 简易模型与仿真图Fig.5 Simple model and simulation of MACSimjx
图6 为输出端结果。由图可知MACSimJX组件能够按照制定的规则完成不同线程系统间的信息传递,证明了此组件的有效性。

图6 输出结果Fig.6 Output results
在仿真结束后,通过JADE 中sniffer 组件查看并记录Agents 间的信息交互情况。图7 所示为Agents 间信息交互图。仿真开始客户端分别将Simulink 中信息传递给组网中3 个智能体(ssa1—蓝色线,sda2—黄色线,eda3—红色线)。智能体根据内部规则设定,分别接收其他智能体传来的信息,同时将自身信息传递给另外两个智能体,经过计算后将结果返回至Simulink 模型。

图7 Agents 间信息交互图Fig.7 Information interaction diagram among Agents
3 能量管理策略
能量管理策略为EREV 智能控制的核心,增程器和驱动电机的动力分配方案将会直接影响整车的能量消耗。
3.1 电辅助控制策略
电辅助控制策略以发动机为主要动力源,驱动电机为后备辅助动力源对EREV 进行能量分配。该策略较为简单且易实现,但是在整车经济性方面效果不理想,其具体流程如下。
1)如果SOC 低于最低阈值,则增程器工作来给动力电池充电。
2)增程器保持开启状态,直到SOC 达到高阈值,关闭增程器,由电机单独驱动车辆。
3.2 动态规划能量管理策略
动态规划(DP)控制策略采用多阶段决策方式对能量管理问题进行离线计算求解。尽管DP 算法所得解通常为最优解,但却因计算量过大而难以应用于实车,因此本文将DP 算法作为最优对照组[9]。DP 算法由逆向求解和正向寻优两部分组成,图8所示为DP 算法的基本原理示意图。

图8 DP 算法原理图Fig.8 Schematic diagram of DP algorithm
为了合理地使用动力电池电能,将电池SOC作为系统状态变量,增程器功率作为控制变量,采取合适的离散步长如式(8)所示对系统变量离散化。
式中:fs为系统状态转移方程,用来描述离散系统的状态变化;x(k)和u(k)分别为系统离散后第k阶段的状态变量和控制变量。将式(1)和式(2)离散化得到如式(9)所示的系统离散状态转移方程。
将式(10)所示整车燃油经济性作为目标函数。式中meng为增程器燃油消耗量,可表述为增程器转矩和转速的函数。根据发动机和电机的物理极限可以得到优化性能指标的约束如式(11)所示。
式中:Pe_min和Pe_max分别为增程器最小功率和最大功率;Pchr和Pdis分别为电机最大充电功率和最大放电功率;Pd为整车需求功率;SOCmin和SOCmax分别为电池SOC 最小限值和最大限值。
DP 控制策略的逆向求解步骤如下。
1)对整车状态变量、控制变量进行离散化。
2)以第k阶段的状态量x(k)和不同的控制量u(k)为自变量,通过式(14)计算当前阶段的目标函数J(k),将该阶段最小目标函数值存储在成本矩阵中,并同时记录对应的控制序列。
3)令k=k-1 进行迭代,根据式(13)计算k-1 阶段的状态量,直至k=1 结束。
正向寻优则从第一个离散区间开始搜索,以每一区间目标函数最小的控制序列为动力最优分配方案,并以式(13)计算下一区间状态,直至最后一个离散区间结束。
3.3 多智能体控制策略
利用多智能体系统对恒温器式控制策略进行改进,创建发动机智能体EngineAgent、驱动电机智能体MGAAgent、蓄电池智能体BatteryAgent 以及系统智能体SystemAgent。图9 所示为EREV 的EMS 控制模块。MATLAB/Simulink 输入端信号有动力电池端电压Ubat、电池输入总电流Ibat、整车需求转矩Treq以及整车需求转速nreq。输入信号以数组的形式分别通过MACsimJX 传递给EngineAgent、BatteryAgent、MotorAgent,在相应的子智能体中进行模式识别,并将识别的结果发送给SystemAgent。系统智能体根据不同的模式进行相应计算和推理,并将计算结果发送给其他智能体以实现交互和修正。

图9 多智能体转矩分配模块Fig.9 Multi-agent torque distribution module
当电池电压低时应及时充电,所以高、低阈值应适当提高。当电池电压提高时,高、低阈值应适当降低。因此根据电池端电压Ubat设定自适应SOC 阈值。当Ubat处于[320,340]区间时,SOC高、低阈值设定为0.43、0.37;当Ubat处于[340,350]区间时,SOC 高、低阈值设定为0.41、0.35;当Ubat大于350 时,SOC 高、低阈值设定为0.4、0.3。
基于MAS 的功率分配策略如下:BatteryAgent根据电池端计算电池SOC 值,根据自适应SOC阈值判断电池电量状态,并将电量状态发送给其他智能体进行交互和推理。MotorAgent 对动力电池最大功率和当前整车需求功率进行比较来判断动力电池功率是否充足,同时也要将功率状态发送给EngineAgent 进行协同状态判断。而EngineAgent则需要根据电池电量状态和功率状态判断增程器的开关。当SOC 值低于SOC 低阈值或者整车Preq高于动力电池输出功率Pbat_max时,增程器启动;当SOC 值大于SOC 阈值且当整车Preq低于动力电池最大输出功率Pbat_max时,关闭增程器,动力电池单独驱动车辆行驶。完成逻辑判断后EngineAgent将开关状态发送给SystemAgent,最后由SystemAgent进行发动机和电机的转矩分配并控制相应执行器工作。为提高燃油经济性,SystemAgent 要按照发动机最优工作曲线对增程器进行功率分配。图10所示为多智能体能量分配策略流程图。

图10 多智能体能量分配策略Fig.10 Multi-intelligence energy allocation strategy
4 仿真分析
通过MACSimjx 将MAS 组网和Simulink 模型连接并进行仿真,验证所建立的多智能体组网技术对EREV 能量分配的有效性,并对比了整车模型在多智能体组网控制下与传统电辅助控制策略下的能量消耗。选择在国六标准WLTC 工况下进行仿真,得到的车速如图11 所示,仿真结果显示车速跟随情况较好。

图11 WLTC 车速跟随图Fig.11 WLTC speed following diagram
图12 所示为电辅助控制下的SOC 值和发动机功率图。初始SOC 为0.7,当动力电池到达SOC低阈值时,发动机开启并对动力电池进行充电,此时增程器以恒定功率输出,在SOC 值到达高阈值后发动机关闭,电池SOC 维持在预设区间内。

图12 电辅助控制仿真图Fig.12 Simulation diagram of electric-assisted control
图13 所示为DP 控制策略的SOC 值和发动机功率图。由图可知,相比于传统电辅助控制策略,DP 控制策略的增程器功率输出更加均匀,SOC 下降更平缓,但是增程器启停次数大幅度增加,一定程度上影响发动机使用寿命。

图13 DP 控制仿真图Fig.13 DP control simulation diagram
图14 所示为MAS 组网控制的SOC 值和发动机功率图。由图可知,MAS 组网控制下的增程器功率相比于传统电辅助控制策略更合理,发动机启停次数也比动态规划更少,仿真过程中动力电池SOC 变化幅度更小,更利于延长电池使用寿命,增加续驶里程。

图14 MAS 组网控制仿真图Fig.14 MAS network control simulation
从图12、图13 和图14 可以看出,当接收到整车信息后,多智能体组网技术能够根据Preq和SOC 值判断发动机的启停,依照各智能体间主体控制程序输出功率实现对EREV 的整车需求转矩的分配,且电池SOC 值保持情况良好。
表1 所示分别为传统电辅助控制、动态规划控制策略和MAS 组网智能控制下的能量消耗情况。由表可知,传统电辅助控制总能量消耗量为16 694.6 kJ,电能消耗量为4 497.8 kJ,燃油消耗量为0.396 L,动态规划控制策略的总能量消耗为14 113.5 kJ,电能消耗为3 795.5 kJ,燃油消耗0.335 L,MAS 组网智能控制的总能量消耗值为13 921.5 kJ,电能消耗量为3 942.3 kJ,燃油消耗量为0.324 L。在初始条件相同时,相比于动态规划控制策略,MAS 组网智能控制的节油率为3.3%,电能消耗量高出3.9%,总能量消耗减少了1.4%;相比于传统电辅助控制策略,MAS 组网智能控制的节油率为18.2%,电池电能消耗减少了12.4%,总能量消耗减少了16.6%。在不考虑其他能量转化的情况下,智能控制下的整车能量消耗在可接受的范围,因此MAS 组网可以通过MACSimJX实现对EREV 转矩分配的智能控制。

表1 不同控制下能量消耗情况Tab.1 Energy consumption under different controls
5 结论
1)提出一种基于多智能体组网技术的增程式电动汽车能量管理策略,构建了EREV 主要动力部件智能体框架,通过MACSimJX 实现了各动力部件智能体组网与Simulink 模型的连接。
2)使用MAS 组网对恒温器能量管理策略进行改进,并在WLTC 工况下进行仿真。仿真结果表明,所提策略相比于动态规划算法总能量消耗减少了1.4%,节油率为3.3%,控制效果相差不大,相比于传统电辅助控制策略总能量消耗减少了16.6%,节油率为18.2%,控制效果显著提升,有效做到了节能减排,增加了车辆行驶里程。
猜你喜欢
建材发展导向(2022年10期)2022-07-28 03:03:58
汽车实用技术(2022年4期)2022-03-07 03:47:32
大众投资指南(2021年23期)2021-12-06 05:46:40
建材发展导向(2021年12期)2021-07-22 08:06:32
建材发展导向(2021年9期)2021-07-16 07:11:10
汽车实用技术(2020年2期)2020-02-25 03:19:53
能源(2017年12期)2018-01-31 01:43:00
汽车文摘(2017年5期)2017-12-05 16:34:04
汽车文摘(2017年10期)2017-12-02 01:10:31
资源再生(2017年4期)2017-06-15 20:28:30
