基于UWB技术混合算法的工作面人员精准定位技术研究及应用
2023-11-21 10:54:52孙鹏亮汪文良智宝岩赵亚军
科技风 2023年32期
孙鹏亮 汪文良 智宝岩 赵亚军
1.中国煤矿机械装备有限责任公司 北京 100011;2.常州佐安电器有限公司 江苏常州 213000;3.中煤陕西榆林能源化工有限公司 陕西榆林 719000;4.中煤大同能源有限责任公司 山西大同 037001
1 概述
煤矿工作面人员的精确定位是实现煤矿智能开采技术常态化应用的技术瓶颈之一,随着超宽带(Ultra Wide Band,UWB)技术的逐步成熟,近年来被行业逐步引入。UWB技术在原理上具有较高的带宽信号,定位精度准、时间分辨率高、衍射能力强、设备功耗低、定位卡待机时间长等特点。与其他的定位技术相比,能够更好地适应煤矿井下复杂的工况环境。因此,更适用于井下综采工作面的人员定位场景。
2 UWB技术的定位方法对比分析
UWB是基于短能量脉冲,通过正交频分调制或直接排序进一步处理,调整到一个频率范围内。主要特点是传输速率高、空间容量大、成本低、功耗低等。该项技术依据信号在基站间飞行时间的长短来测量距离TOF(Time of Flight)。该方法采用两个不同的异步收发机接收同一信号源的飞行时间,通过时间差测量相对距离。双向飞行时间法每个信号接收设备从开始工作时会产生一个单独的时间标志戳。设备A在时间T1发射请求信号,设备B在T2时刻发射响应信号,被设备A在本身标定的时间标志T2时刻接收。这样便能够计算出该脉冲信号在设备A和设备B之间的传播时间,通过时间差值计算相距的距离S。但是单独采用TOF方式计算,存在严苛的束缚条件:信号发射装置和信号接收装置应该长期保持同步。这是一个比较棘手的问题。而双向双通道测可以有效解决这个问题,它采用了时间飞行计算方法的优点的同时又极大地去除了时间飞行计算方法的同步问题,为该种方法的应用解决了实际问题。因此,在UWB技术的使用方面可以借鉴这种算法,采用TOA(到达时间)、TDOA(到达时间差)、AOA(到达角度或称为DOA估计)定位技术和这三种技术的混合技术。
TOA主要是通过定位卡与两个以上的定位基站建立信号连接,通过定位卡信号与基站之间进行画圆计算,通过多个定位基站画圆的焦点来确定定位卡的位置。但如果在信号传播过程中收到外界环境因素干扰,则在画圆的过程中将会出现偏差,而整体的定位精度将会出现较大问题,同时还需要基站做时钟同步处理。TDOA的定位方式不需要定位基站和定位卡之间的同步,仅需要定位基站之间自己同步即可。定位基站的安装位置固定后,定位基站之间实现同步相对容易,这样从工程实践角度TDOA的定位方式比TOA定位方式容易工程化。AOA的特点就是不需要大量的定位基站,靠少量的基站根据角度计算即可定位。移动终端根据与基站1和基站2连个基站形成基于水平方向的角度,判断角度值,作射线延长,汇集到同一点,该点即为移动终端的位置,这种方法可以极大地缩减对基站数量的依赖。但是其缺点是长距离的判定会因为角度的偏差造成较大的误差。一般不适宜在长距离定位中应用。
3 UWB技术在井下工作面人员精确定位研究
为解决井下人员主动安全防护,需要精准获取工作面人员位置信息,再与其他设备实现联动闭锁保护。核心问题是对人员在工作面位置的精准定位。为解决该技术问题,近年来逐步开展基于UWB技术的综采工作面人员精确定位相关技术研究。通过对该项技术的研究发现,将TOA、AOA和TDOA三种定位方式进行有机融合,可得到较好效果。首先利用TOA的值计算出移动终端和基站之间的距离R,那么可以确定移动终端的位置在以基站为圆心,R为半径的圆周上。接着利用天线阵列从移动终端到基站作出一条射线,则射线与圆之间的交点就是移动终端的位置。若移动终端的位置为(X0,Y0),基站位置为(X,Y),在基站测得的移动终端发出的信号的到达角度为θ,基站和移动终端的距离为R,则他们满足如下方程:
(Xo-X)2+(Yo-Y)2=R2
再结合TDOA-AOA定位方法,对上述精度进行矫正,具体原理如下图1所示。
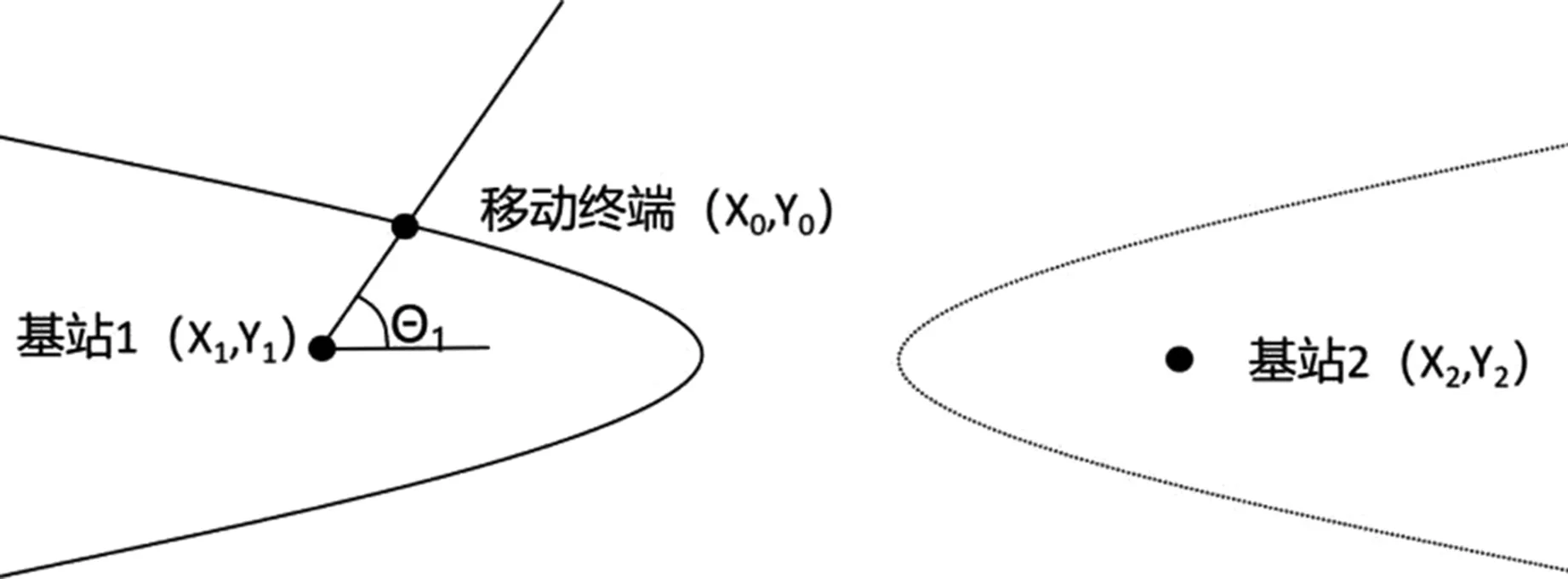
图1 TDOA-AOA定位示意图
通过两者的相互结合,相互矫正,以获得更准确的定位信息。实现对移动终端的精准定位。这种定位方式可有效避免单一定位原理造成的误差。减少工作面复杂环境对信号传输的影响,实现人员位置的精准定位。
4 基于UWB的高精度人员定位算法分析
4.1 加权算法原理
读卡器读取定位卡信息时,障碍物遮挡引起的通信延时误差,影响定位精度。运用无障碍物遮挡测距结果加权平均大大提高了定位的精准度。基于上述方式,人员定位卡距离第一个读卡器的位置计算方法为:
4.2 加权算法实现
上述公式中r1、r2…rn,根据无线数据传输的衰减原理,结合实验数据确定了r的数学估算模型,其模型算法为:los=32.44+20lgF+20lgd,式中los表示信号衰减,单位dB,F表示信号频率,单位MHz,d表示距离,单位km。
接收信号强度为:s_r=p_t-los;其中,s_rd表示距离为d时的理论接收信号强度,p_t表示发射功率,los表示信号衰减。则接收信号强度和通信距离的计算可表示为:
s_rd=p_t-32.44-20lgF-20lgd
通过测试提出符合适应环境的加权因子公式:
r=1-(s_rd-s_r)/(s_rd+102)
其中,r是加权因子,s_rd表示距离为d时,无遮挡时的信号强度,s_r表示实际接收的信号强度。
4.3 无遮挡数据仿真
在实验室开展无遮挡数据仿真研究,首先将定位卡和读卡器中间不放置任何物体,采用对称双边两路测距方法进行距离测试,进行反复100次的测试。测试结果如图2所示。通过测试发现所有数据的波动范围小于0.2m,信号强度基本在-83~-86dB之间。
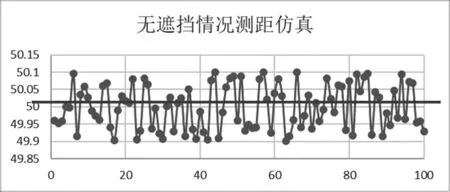

图2 信号测距及强度仿真示意图
4.4 有遮挡情况仿真
对不同结构遮挡物进行仿真,将定位卡与信号采集装置之间分别放置一个水泥墙体、一个岩石类障碍物、煤块类障碍物、水幕类障碍物、钢铁支护结构类等五种障碍物,分别进行50次的信号传输测试,具体的测试数据统计如图3所示。
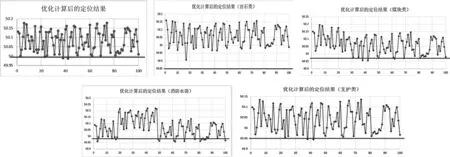
图4 加权算法优化定位计算结果图
4.5 不同遮挡物仿真结果分析
通过对比不同遮挡物仿真结果,可以发现定位精度、信号强度影响各不相同。如上图所示,水泥墙体结构对定位精度影响最大,误差为1米,水幕类结构对定位精度影响最小。针对信号不同衰减规律,利用公式计算不同的加权因子及权重,对仿真结果进行加权优化仿真。
4.6 利用加权算法计算
通过利用加权算法的优化,将50米实测值的数据,通过加权算法优化,再对上述情况进行测试,测试结果的定位误差都小于0.3米,达到了预期效果。
5 实际应用情况
以中煤集团某煤矿为例,工作面宽度260m,煤层厚度平均厚度为6.1m,煤层倾角≤10°。根据工作面的地质条件以及工作面设备的特性,采用相对密集的布置方式,在工作面内布置6台基站,分别布置在顺槽转载机、工作面5号支架、41号支架、77号支架、113号支架、149号支架处,每台基站之间的距离为36架,支架的中心距为1.75m,因此两台基站间的距离为63m。每台基站所在的支架安装两个信号接收器,分别指向左右两个方向,用于接收不同位置的信号。首次安装结束后分别对液压支架立柱前侧行人通道和立柱后侧行人通道分别独立定位,受液压支架立柱封闭性影响,信号无法进行穿越传输,两种定位方式不能够同时计算人员位置,容易造成人员位置的跳变。出现这种情况的主要原因是立柱阻挡信号后,当人员异动后,躲过立柱的阻挡既能收到信号,这样造成位置跳变。此外,由于基站无法精确判断前后部人员通道位置,容易出现前部和后部基站对同一位置的人员进行同时“抢”信号,都认为在自己判定的范围内,这样就容易导致频繁输出不同的结果,出现人员位置跳变。因此采取在单一侧通道进行人员位置判定,将读卡器安装在立柱后侧人员通道上方位置用于识别人员的位置。井下工作面精确定位设备安装数量如下表所示:

设备安装数量表
开始调试过程中,保障电池的使用能力和降低电池电量的损耗,读卡器的刷新频率较低为10s一次,但操作人员在工作面行走过程中,经过每架的时间要远远小于10s。这样就造成人员跳架。为解决该问题,在实验过程中,不断提高读卡器的刷新频率,最后将读卡器刷新频率提高为500ms/次,进而满足对人员精确定位的要求,人员在行走的过程中不会出现跳架。虽然提高了刷新频率,实现人员能够精准定位,但是电池电量的使用能力方面大大降低。工作面人员行走过程中,从机头向结尾方向,以1.4m/s以下的速度行走,在行走的过程中无论是哪个方向,均能够准确识别人员的位置信息,基本不存在跳架现象。
6 结论
(1)本文分析了基于不同计算方式的UWB技术,并对不同的计算方式的优缺点进行分析,形成了基于混合计算方式的UWB技术方案,该方案在实际使用过程中具有较好的适应性。
(2)针对井下工作面实际工况存在遮挡的特性,在研发过程中进行了遮挡分析,得出遮挡物带来的误差原因,提出了误差修正的方法。
(3)本文对针对现场实际情况进行了部署和测试,通过井下工作面实测数据验证,定位精度达到0.3米,系统能够与支架电液控制系统联动,实现了人员所在位置的支架自动停止动作,提高了主动安全防护能力,具有较好的推广应用价值。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
电脑爱好者(2020年17期)2020-09-14 12:12:41
现代测绘(2018年1期)2018-03-06 05:16:16
探索科学(2017年4期)2017-05-04 04:09:47
电子技术与软件工程(2016年24期)2017-02-23 13:35:11
中国公共安全(2017年11期)2017-02-06 05:28:03
测绘通报(2016年9期)2016-12-15 01:56:16
中国交通信息化(2016年8期)2016-06-06 03:56:25
移动通信(2015年17期)2015-08-24 08:13:10
武夷学院学报(2015年3期)2015-07-18 11:03:48