Pix4dmapper与精灵4Pro在土方测量中的应用研究
2023-11-20 01:25:52马智伟
西部探矿工程 2023年11期
马智伟
(山西省煤炭地质物探测绘院有限公司,山西 晋中 030600)
1 工程内容
山西某测绘团队成立于2005 年,是一家进行数字影像后处理、三维建模等技术型公司。2022 年9 月受某房地产公司业主委托,对太原附件一处未来将建设为足球基地的区域进行土方测量研究工作。
施工场地位于丘陵地带,面积为85000 约平方米,为城乡结合处一处工业厂区,场地上原本覆盖的林木已基本被清除。但建筑垃圾散乱堆砌,不便于测量人员行走举杆测量。所以,该测绘团队为业主推荐了更先进的土方测量解决方案—无人机测绘技术。
2 研究方法
无人机测绘首先需要数字正射影像采集,这需要覆盖整个场地,且具有一定程度的重叠。该项目使用的无人机是大疆的4Pro 无人机。4Pro V2.0 配备2000万像素图像传感器,可拍摄4K视频。图像传输半径最高可达10km。五向环境感知功能保障了飞行安全,飞行高度为100米。无人机总共飞行了3个架次,共获得1026张影像。另外工作人员还采集了10个相控点,用于进一步提高成果精度,并设置4个检查点,便于检查测量成果质量。项目概况大概为:项目测区位于山西某工业厂区,研究面积约八万余平方米,图像数量1028张,成果分辨率达到3.3 厘米级别,测量成果为土方计算表格,数字地面模型以及正射影像等。
图像和相位控制点采集应由两人在一天内完成。如果项目测量员使用传统RTK 进行土方测量,同一区域可以在两天内完成。测量面积越大,无人机与传统方法的效率差异越明显。无人机土方测量的优点主要体现在:工作效率耗时极端,测量精度非常高,现场还原度很好,劳动强度小,安全性高等优点。
3 Pix4Dmapper内业数据处理
Pix4dmapper 作业基本流程为:首先,获取原始数据,建立测量区域,并导入数据,包括图像、POS、控制点、相机参数和其他数据,然后自动完成解析空中三角测量,生成正射影像(DOM)、数字地表模型(DSM),最后出空三报告,精度分析等数据。
3.1 原始数据资料预处理
(1)双击pix4d 软件图标,进入程序主界面。程序初始化界面如图1所示。

图1 程序初始化界面
(2)键入项目名称,然后选择项目存储路径及位置。选择下一步,并导入原始航测照片。
加载数据,一定要注意,路径不能包含中文以及特殊文字字符等。有TIF和JPG两种格式数据可选。
(3)继续自动选择下一步,并定义“图像坐标系”、“相机模型”、“地理位置”等参数数据。
首先,设置图像坐标系统,即设置POS 数据坐标系。默认为美国的WGS84 坐标。一般情况下我们需要更改成我们的目标坐标系统,比如本次,根据我们的地理位置,选择CGCS2000 114°中央子午线。
导入POS 数据:选择导入就绪的POS 数据文件。文件格式顺序依次为:照片名称、纬度、经度和高程信息数据。单击并且选择——从文件导入图像定位信息图标。
单击选择——“浏览图标按钮,然后我们选择对应的高精度位置与姿态测量系统数据文件,并且选择确定按键图标。
相机型号的设置,pix4d 软件会自动读取,比如本次飞行的精灵4pro 相机。并且进行自动检查、修改相机型号等设置。如果需要修改相机型号,也可以自行选择编辑图标按钮,相机型号界面如图2所示。
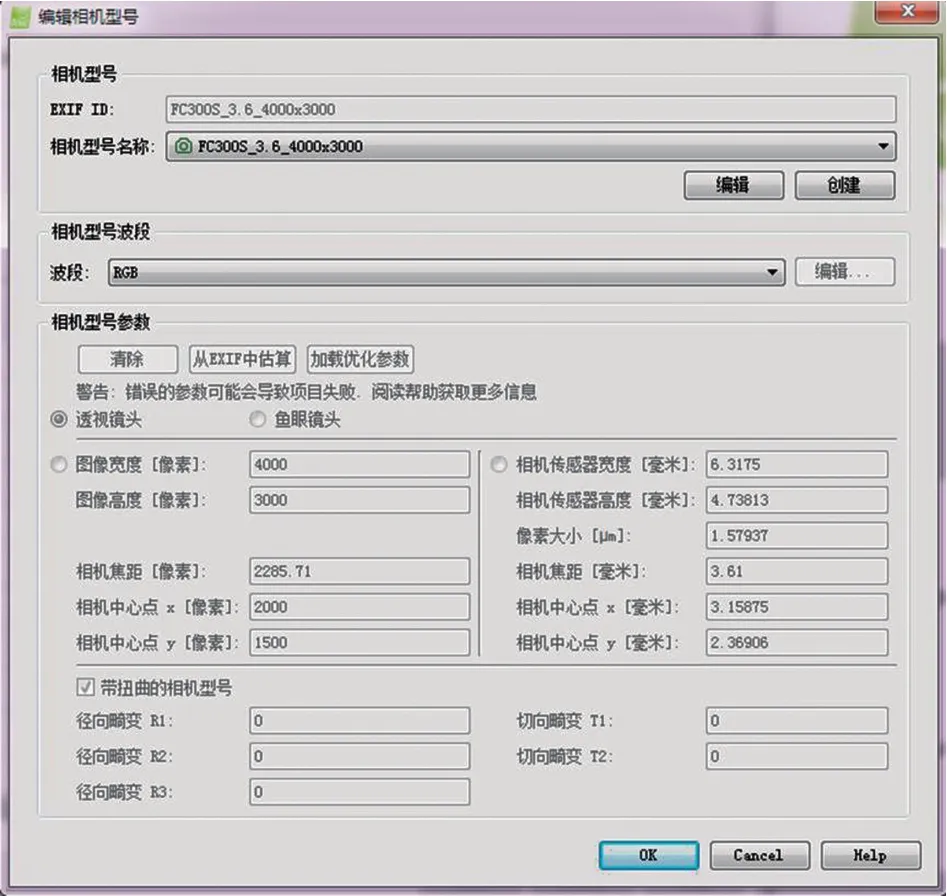
图2 相机型号界面
3.2 数据处理
新建工程项目完成之后,我们要注意界面显示问题,提示大家:如果电脑系统连接了外部网络,则显示基础图和飞行航路图;如果未连接外部网络系统,则只显示飞行轨迹图。
点击“运行”按钮图标,选择“本地处理”按键。这是进行内业数据处理的第一步。Pix4dmapper 软件提供了“高精度处理”和“快速检测模式”两种初始化处理模式供大家选择。其中,“高精度处理”模式提供最高精度的数据结果。与之对应的“快速检测”模式,则是通过降低原始图像数据的影像分辨率的方法,进而来提高数据处理的速度。结果航测影像数据的精度略低于高精度处理模型之精度。
快速处理检查工作。这一步只是起到一个检查作用,属于可选项,在实际软件操作中可以不进行此步骤。快速处理的结果不太准确,但是此种方法快速处理会快得多。因此,建议在无人机航测现场研究区域即可进行快速处理研究,以便及时处理发现航拍影像的问题,进而决定是否需要补拍。
选择“快速检测”单选按钮图标。同时取消第二步和第三步的选择,然后单击“开始”按钮,进行数据预处理,检查原始影像质量。
单击运行按钮图标。显示影像成果质量报告文档资料。检查质量报告时候主要检查两个问题。即数据集和相机优化质量:
数据集:所有图像将在快速处理过程中匹配。这里我们需要确保大部分或所有图像匹配。如果没有,说明照片之间重叠不够,或者照片质量不好。
相机优化质量:相机初始焦距与计算出的相机焦距之差不能超过5%,否则相机原型号不正确,相机复位。
空三刺点方法有:第一种是使用“空三射线编辑器”进行操作;第二种是使用平面编辑器进行编辑。
使用空三射线编辑器添加控制点(推荐):该方法用于初始化处理后,在空三射线编辑器中显示控制点。它用于从POS数据中预测所有控制点的位置。这适用于可以在软件坐标系统库中找到的POS 数据坐标和GCP 坐标。使用此方法可添加控制点,并在初始处理后手动设置。具体操作步骤为:
(1)单击图标打开“图像控制点/手动连接点编辑器”按钮图标。
(2)导入相控点数据——影像地面控制点。点击“编辑”按钮,弹出“选择图像控制点坐标系统”对话框,定义控制点的投影坐标系统。缺省值为WGS84。对于其他坐标系,它们可以由按钮或按钮定义。定义完成后,单击OK。
(3)返回到“管理图像控制点/手动连接点”对话框,单击按钮,然后选择控制点坐标文件(.txt或.csv格式)。
(4)单击“打开”按钮以显示“导入图像”图标。如果不需要更改,单击OK按钮即可。
切记注意:如果图像控制点数据格式不正确,则会导致无法加载控制点数据。
(5)空三刺点技巧:首先,点击并选择主屏幕左上角的“连接点—手动/图像控制点”,然后选择要穿刺的图像控制点的名称。这是主屏幕右下角的“Image”位置,将显示包含图像控制点位置的图片。
然后使用图片查看器打开包含图像控制点位置的图片,通过对比找到图像控制点。
通过比较图像并在红色相控标志“十字”附近寻找易于识别的签名特征,返回PIX4D的主屏幕,并在右下角的“图像”处选择一张照片,搜索之前识别的目标特征并缩小搜索范围。一旦你找到了目标形状,在附近的小范围内寻找红色的“十字”地面控制点标识。
在软件处理过程中,需要确认原始数据的完整性。检查采集的图像中是否有不合格的照片。同时检查pos 数据文件,主要检查飞行带变化的照片号,防止pos 数据中的照片号与图像数据中的照片号不一致。如有号码差异,可选择手动调整方法。
从左到右依次为照片名称编号、经纬度、大地高、航向倾角、横向倾角、照片旋转角度等参数。Pos 数据格式如图3所示。

图3 Pos数据格式图
将无人机图像和相位控制点数据导入Pix4Mapper进行处理和建模,然后根据构建的模型计算土方量。Pix4Mapper 对数据处理的计算机配置有很大的容忍度,可以适应普通笔记本电脑的配置。在本项目中,员工的数据处理在笔记本电脑(I9 8700HighQ,GTX1080,128GB 内存)中完成。大约8h 后,建模工作完成,生成了高精度3Dcloud、3D 纹理模型数据、正射影像数据和DSM(数字地形模型)数据模型。
4 精度检验
工作人员首先使用检查点来验证结果的准确性。通过将检查点的原始位置与计算位置进行比较,平面误差为1~3cm,高程误差为1~5cm,完全可以满足业主对精度的要求。具体检查点精度指标主要为:J1:373549.516(373549.504)、4196533.415(4196533.404)、775.58(775.57),其平面误差为1.6cm,高程误差为1cm;J2:373519.513(373519.521)、4196430.419(4196430.439)、774.76(774.72),其平面误差为2.2cm,高程误差为4cm;J3:373113.515(373113.548)、4196234.409(4196234.447)、776.61(776.63),其平面误差为5.0cm,高程误差为2cm;J4:373137.311(373137.332)、4196335.328(4196335.351)、772.39(772.44),其平面误差为3.1cm,高程误差为5cm。括号内数值为影像上获取的点位坐标及高程数据。
DSM(数字地形模型)表示地面的起伏,是Pix4Mapper 中土方工程计算的基础。软件会根据用户定义的起始曲面自动计算起始曲面上方和下方的挖方和填方量。在本项目中,业主提供了18 个计算基准面。将这些起始基准数据导入Pix4dMapper,然后按下“计算”按钮,在短时间内获得图纸的填充和开采体积。Pix4dmapper的计算结果如图4所示。

图4 Pix4dmapper计算结果图
5 结语
此项研究实验最终成果为一张土方量成果计算统计表,包括每个研究区域的面积、填挖方量。依据软件Pix4Dmapper计算功能,本研究项目的土方工程计算总量为36.5×104m3,总误差值为0.25×104m3。
通过此项目,我们总结了本项目中使用的无人机航空摄影测量的解决方案,对比传统测量在土方量计算上,此种方法的优势为:现场作业时间短,自动化程度高。无人机飞手只需要在测区附件操作无人机,安全性大大的提高了。
此方法结果具有较高的精度和分辨率,有利于更准确地测量土方:传统测量每5~10m测量一个点,且点的密度有限,不能很好地反映土方的细节;无人机测绘可以实现测区图像的全部拍摄。地面分辨率最高可以达到厘米级精度水平。
Pix4Mapper 在土方测量期间生成地表模型、三维点云数据、正射照片和其他结果。
猜你喜欢
计算机应用文摘(2019年24期)2019-05-30 17:13:30
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
中国工程咨询(2017年12期)2017-01-31 02:56:54
电影评介(2016年24期)2017-01-04 05:41:44
安徽地质(2016年4期)2016-02-27 06:18:21
读者(2015年13期)2015-05-14 11:41:05
全球定位系统(2015年4期)2015-02-28 12:38:14
全球定位系统(2015年4期)2015-02-28 12:38:12
河南科技(2014年5期)2014-02-27 14:08:44
江西理工大学学报(2013年1期)2013-03-20 14:57:10