改进AHM-TOPSIS 的智能化雷达信息处理性能评估方法 *
2023-11-18 08:47:16施端阳林强胡冰陈佳君
现代防御技术 2023年5期
施端阳,林强 ,胡冰 ,陈佳君
(1.空军预警学院,湖北 武汉 430019;2.中国人民解放军95174 部队,湖北 武汉 430040)
0 引言
随着科技的发展,新式空战武器和复杂电磁对抗手段层出不穷,担负防空预警任务的雷达装备面临着更加严峻的考验。传统体制的雷达难以满足信息化、智能化战争的需求,急需发展新的雷达技术。当前,人工智能技术逐渐成熟,在武器装备领域的应用愈发广泛。国内外学者也对人工智能技术与雷达技术深度融合产生了浓厚的兴趣,智能化雷达技术已成为雷达领域的研究热点。
虽然行业内对智能化雷达的概念比较模糊,暂时还没有统一的定义,但可将智能化雷达大致理解为人工智能技术与雷达技术相融合的新型雷达系统。根据目前的研究成果,可将智能化雷达分为广义和狭义2 种。广义的智能化雷达是采用部分人工智能技术的雷达,狭义的智能化雷达是广泛采用人工智能技术的强智能雷达[1-2]。前者为智能化雷达的初级阶段,后者为高级阶段。由于智能化雷达的研究尚处于起步阶段,本文的智能化雷达指的是广义的智能化雷达,为智能化雷达的初级阶段。文献[3]指出智能化雷达由初级向高级演进的关键技术之一是智能信息处理技术,包含了目标检测、识别和杂波抑制等内容。因此,本文从智能化检测技术、智能化识别技术和智能化剩余杂波抑制技术3个方面入手,对不同方案的智能化雷达信息处理性能进行评估,以便筛选出最优的智能化雷达技术方案。
目前,公开资料中对智能化雷达性能进行评估的研究不多,彭志刚等[4]设计了雷达智能抗干扰评估仿真系统,从干扰信号感知能力和抗干扰拟制能力2 个方面构建评估指标体系,对智能雷达抗干扰性能进行了评估。本文通过构建智能化雷达信息处理性能评估指标体系,使用改进的属性层次模型(attribute hierarchical model,AHM)对 指 标 进 行 赋权,通过改进的逼近理想解排序法(technique for order preference by similarity to ideal solution method,TOPSIS)进行评估,为智能化雷达信息处理性能评估提供了一种思路。
1 智能化雷达信息处理性能评估指标体系构建
当前,传统雷达主要由天馈、发射、接收、信号处理和终端显示等分系统组成[5],其工作过程如图1所示。传统雷达的整个工作链路呈现开环的状态;目标检测、跟踪和识别分别独立进行;信息处理对历史信息应用能力弱,未将历史信息和当前信息进行关联,提取特征量有限,导致对回波信号的感知能力弱。另外,传统雷达的信号处理主要采用脉冲压缩、动目标显示、滑窗和视频积累检测、恒虚警检测以及动目标检测等方法抑制杂波、检测目标。但由于雷达工作环境中地物杂波、气象杂波、类目标杂波和噪声的影响,传统雷达信号处理方法无法完全滤除杂波,仍然会留下一定数量的剩余杂波点迹,给后续的数据处理带来困难。
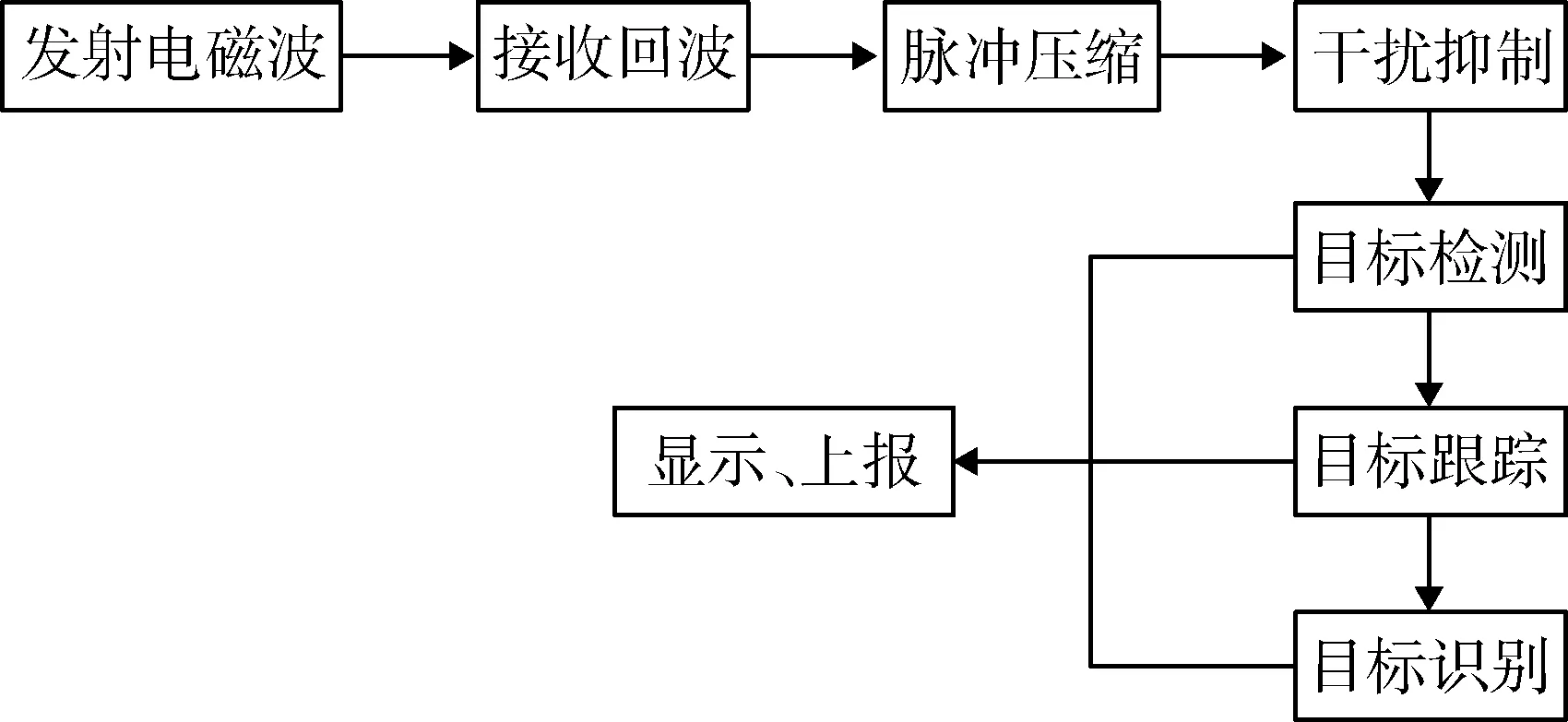
图1 传统雷达工作过程示意图Fig.1 Working process of conventional radar
智能化雷达在传统雷达的基础上增加数据库和评估反馈模块,数据库可存储历史信息和当前信息,对信息进行充分利用;评估反馈模块形成了感知-智能处理-推理预测-控制-感知的闭环链路。智能化雷达工作过程如图2 所示。智能化雷达信息处理与传统雷达信号处理和数据处理不同,在采用传统雷达信号处理方法基础上,对脉冲压缩后形成的雷达原始图像从图像层面采用人工智能技术对目标进行检测和识别,然后对检测后形成的雷达点迹从点迹分类角度出发,通过人工智能技术构建雷达点迹分类器模型来区分目标点迹和杂波点迹,保留分类为目标的点迹,滤除分类为杂波的点迹,从而实现剩余杂波抑制。因此,传统雷达的信号处理过程为杂波抑制-目标检测-目标识别,智能化雷达信息处理过程为目标检测-目标识别-剩余杂波抑制。
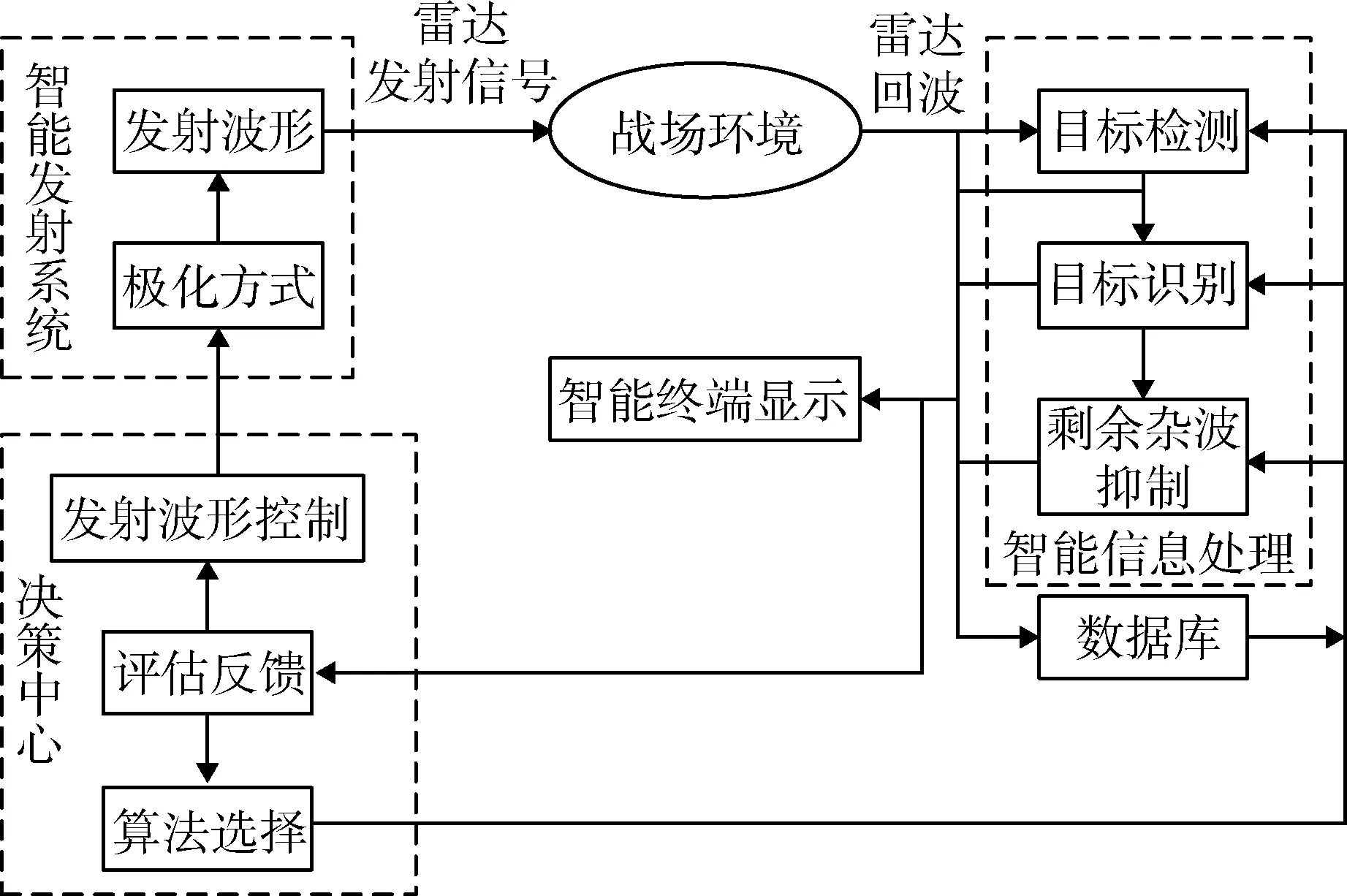
图2 智能化雷达工作过程示意图Fig.2 Working process of intelligent radar
雷达信息处理系统是采用先进的信号处理技术,实现对环境特性的感知、对感兴趣信号的提取和识别、对干扰和杂波的抑制,完成雷达信号处理和数据处理功能的系统[6]。智能化雷达信息处理主要是利用深度学习等人工智能技术实现雷达智能目标检测、智能目标识别和智能杂波抑制等功能[7]。因此,智能化雷达信息处理性能评估指标体系可分为智能化检测技术指标、智能化识别技术指标和智能化剩余杂波抑制技术指标3 部分。各指标的含义如下:
(1) 智能化检测技术指标,由构建的深度学习目标检测模型的性能引出,包含检测率[8](%)、虚警率[9](%)、检测模型训练耗时(s)和模型检测耗时(s)等。
检测率为目标检测模型在测试集中正确检测出位置的目标数量与雷达目标总数之比,计算公式为
式中:TP为被正确检测出的雷达目标数量;T为测试集中雷达目标总数。
虚警率为目标检测模型在测试集中将背景误判为目标的数量与雷达目标总数之比,计算公式为
式中:FP为将背景误检为雷达目标的数量;T为测试集中雷达目标总数。
检测模型训练耗时为目标检测模型在训练集上训练完毕所消耗的时间。
模型检测耗时为训练好的目标检测模型检测单张图像需要的时间。
(2) 智能化识别技术指标,由构建的深度学习目标识别模型的性能引出,包含平均识别率[10](%)、识别模型训练耗时(s)和模型识别耗时(s)等。
平均识别率为目标识别模型正确识别出的各类目标数量与各类目标总数之比的均值,计算公式为
式中:Ni为第i类识别正确的目标样本数;Mi为第i类目标样本总数;L为测试集中目标种类数。
识别模型训练耗时为目标识别模型在训练集上训练完毕所消耗的时间。
模型识别耗时为训练好的目标识别模型识别单张图像需要的时间。
(3) 智能化剩余杂波抑制技术指标,由构建的机器学习点迹分类器模型的性能引出,包含召回率(%)、准确率[11](%)、杂波残余率[12](%)、杂波抑制模型训练耗时(s)和模型抑制杂波耗时(s)等。
召回率为点迹分类器模型正确分类的目标点迹与目标点迹总数之比,计算公式为
式中:nTP为被正确分类的目标点迹数量;nFN为被错分为杂波点迹的目标点迹数量。
准确率为点迹分类器模型正确分类的目标点迹和杂波点迹与点迹总数之比,计算公式为
式中:nTP为被正确分类的目标点迹数量;nTN为被正确分类的杂波点迹数量;nTOTAL为点迹总数。
杂波残余率为点迹分类器模型错分为目标点迹的杂波点迹数量与杂波点迹总数之比,计算公式为
式中:nFP为被错分为目标点迹的杂波点迹数量;nTN为被正确分类的杂波点迹数量。
杂波抑制模型训练耗时为点迹分类器模型在训练集上训练完毕所消耗的时间。
模型抑制杂波耗时为训练好的点迹分类器模型在测试集上判别点迹类别需要的时间。
根据智能化雷达信息处理包含的主要技术,构建如图3 的智能化雷达信息处理性能评估指标体系。
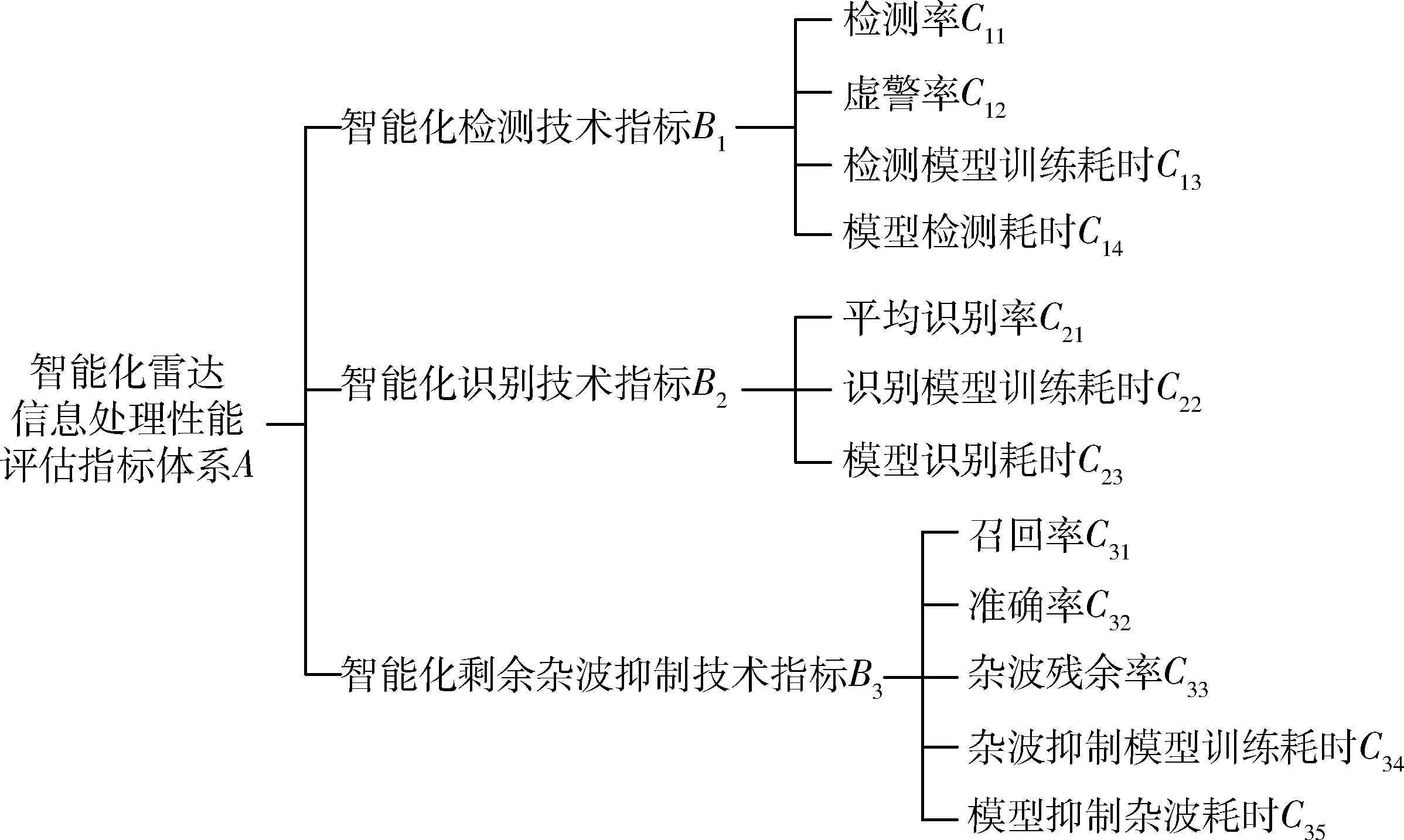
图3 智能化雷达信息处理性能评估指标体系Fig.3 Evaluation index system of intelligent radar information processing performance
2 改进AHM 赋权法
图3 中的评估指标体系是对智能化雷达信息处理性能进行评估的基础,每一个指标都从不同的角度反映了信息处理的某种特性。但是各指标对智能化雷达信息处理性能的影响程度并不完全相同,因此需要对各指标赋予相应的权重,以反映各指标的相对重要程度。
2.1 AHM 赋权法原理
AHM 是一种通过相对属性求解得到指标权重的 赋 权 方 法[13]。AHM 由 层 次 分 析 法(analytic hierarchy process,AHP)[14]改 进 而 来,不 仅 继 承 了AHP 简便、高效的特点,还具有无需计算特征向量和一致性检验的优点,在评估领域得到了广泛应用。
AHM 对指标赋权时,假设评估对象A有n个指标(a1,a2,…,an),专家按照表1 中的比例标度分别给出2 个指标ai和aj相比较得出的重要度bij,从而得到两两比较判断矩阵(bij)n×n。比较判断矩阵中的元素bij具有以下性质:bij>0,bii= 1,bij= 1/bji。为了比较不同指标ai和aj对评估对象的影响程度大小,将ai和aj对评估对象A的相对重要性分别记为aij和aji。由相对重要性aij组成属性判断矩阵(aij)n×n。根据属性测度的要求[15],相对重要性aij和aji应满足:aij>0,aji>0,aii= 0,aij+aji= 1。

表1 比例标度的含义Table 1 Meaning of proportion scale
相对重要性aij可根据标度bij计算得出
式中:K为大于等于2 的正整数;β≥1。
根据AHM 赋权法,各相对属性的权重为
式中:m为某指标所属下一级指标的个数。
最底层指标相对于评估对象A的合成权重为
式中:WBk为各一级指标Bk(k= 1,2,…,s)相对于评估对象A的权重;WCkp为一级指标Bk所属的二级指标Ckp(p= 1,2,…,q)相对于一级指标Bk的权重。
2.2 AHM 赋权法的改进
在研究中,发现式(7)中参数β的取值比较随意,文献[16]中β取值为1,文献[17]中β取值为2,均未说明相应的取值依据。且β取不同值时会得到不同的属性判断矩阵,从而得到不同的指标权重。针对此问题,本文在AHM 法中引入评分标度,将比例标度bij转化为具有可加性的评分标度,避免因参数取值不同导致的权重差异。
评分标度uij表示指标ai和指标aj在对评估对象A进行相对重要度比较时,指标ai的重要性得分;相应地,uji则表示指标aj的重要性得分。评分标度uij可由比例标度bij根据式(10)转化得到:
因此通过专家打分得到两两比较判断矩阵(bij)n×n后,可 通 过 式(10)得 到 评 分 标 度 判 断 矩 阵(uij)n×n。
根据评分标度uij的可加性,经过n次比较后,指标ai获得的重要性得分之和为
在进行n2次比较后,除了n次与自身比较得分为0 外,指标ai与指标aj以及指标aj与指标ai各比较了n(n- 1)/2 次,最终指标ai的重要度得分率,即权重为
3 改进TOPSIS 的智能化雷达信息处理性能评估模型
TOPSIS 法是一种多指标评估方法,构造智能化雷达信息处理方案的正、负理想解作为评估各方案的基准,通过计算待评估方案到正、负理想解的接近程度来评判方案的优劣[18]。
3.1 TOPSIS 法原理
假设智能化雷达信息处理有m个备选方案,即方案集合为X={x1,x2,…,xm},评价方案优劣的指标有n个。在TOPSIS 评估模型中,这n个评估指标的数值构成属性向量Y={y1,y2,…,yn}。此时某一方案xi(i= 1,2,…,m)的n个属性值构成属性向量Yi={yi1,yi2,…,yin},所有方案的属性向量可构成决策 矩 阵Y= (yij)m×n。在n维 空 间 中,向 量Yi可 视 为空间中的一个点,该点能够唯一地表示一个方案xi。在该空间中假设存在2 个点,其中一个点的每个属性值都是决策矩阵中该属性的最优值,另一个点的每个属性值都是决策矩阵中该属性的最劣值,前者记为正理想解x*,后者记为负理想解x0。在n维空间中,对每个待评价方案xi到正理想解x*和负理想解x0的距离进行比较,其中与正理想解距离最近且与负理想解距离最远的方案为最优方案。按照此方法依次对方案集合中所有方案的优劣性进行排序。
TOPSIS 法的计算步骤如下[19]:
step 1:计算规范化决策矩阵。已知决策矩阵Y= (yij)m×n,则 规 范 化 决 策 矩 阵Z= (zij)m×n可 通 过式(13)得到:
step 2:计算加权规范矩阵X= (xij)m×n。若各属性的权重向量为W= (w1,w2,…,wn)T,则加权规范矩阵中的元素为
step 3:计算正理想解x*和负理想解x0。假设正理想解x*和负理想解x0的第j个属性值分别为和,则
step 4:计算各方案到正理想解的欧式距离。方案xi到正理想解的距离为
方案xi到负理想解的距离
step 5:计算各方案的综合评 数。可根据方案xi的综合评估指数ci的大小来判定各方案的优劣次序:
TOPSIS 法计算方便,结果客观。但也有不足之处[20]:可能存在某种方案与正理想解欧式距离近的同时与负理想解欧氏距离也近的情况,导致无法判断方案的优劣性。
3.2 改进TOPSIS 法
针对TOPSIS 法存在的不足,将其与灰色关联分析法结合,构造改进的灰色理想值逼近模型。该模型将欧式距离改为灰色关联度,根据各方案的灰色关联贴近度判断优劣。
改进的TOPSIS 法舍弃step 2,由step 1 得到规范 化 决 策 矩 阵Z= (zij)m×n后,直 接 在step 3 中 通 过规范化决策矩阵得出正理想解z*和负理想解z0。此时,式(15),(16)应改为
将step 4 中的欧式距离改为灰色关联系数,计算各方案与正、负理想解关于第j个属性的灰色关联系数:
最后计算各方案的灰色关联贴近度:
4 实例分析
某型雷达智能化信息处理主要涉及智能化目标检测、智能化目标识别和智能化剩余杂波抑制3个方面。其中,智能化目标检测有Faster R-CNN 和YOLO 2 种基于深度学习的目标检测模型;智能化目标识别有AlexNet 和VGGNet-16 2 种基于深度学习的目标识别模型;智能化剩余杂波抑制有改进的BP神经网络[21]、竞争神经网络[22]、GA-BP 神经网络[23]和LVQ 神经网络4 种基于机器学习的点迹分类模型。智能化剩余杂波抑制中的竞争神经网络为无监督学习方法,适用于机动雷达初次架设时无法获得大量带标签的训练样本的情形,其余3 种方法均为有监督学习方法,适用于固定雷达日常战备值班的情形。因此,智能化雷达信息处理共有16 种方案组合,其中适用于机动雷达初次架设的有4 种组合,适用于固定雷达日常战备值班的有12 种组合,各方案组合情况见表2。

表2 智能化雷达信息处理方案Table 2 Intelligent radar information processing schemes
通过民航、军航检飞的方式对智能化雷达信息处理性能进行评估。具体步骤为采集实际工作中民航和军航的雷达回波数据,通过智能化雷达信息处理技术对雷达回波数据进行智能检测、智能识别和剩余杂波智能抑制,再根据检测、识别和杂波抑制的效果,采用改进AHM-TOPSIS 法对该型雷达智能化信息处理16 种方案的性能进行评估,得到最优的方案组合。经过前期的研究,该型雷达智能化信息处理性能评估各指标的指标值如表3 所示。
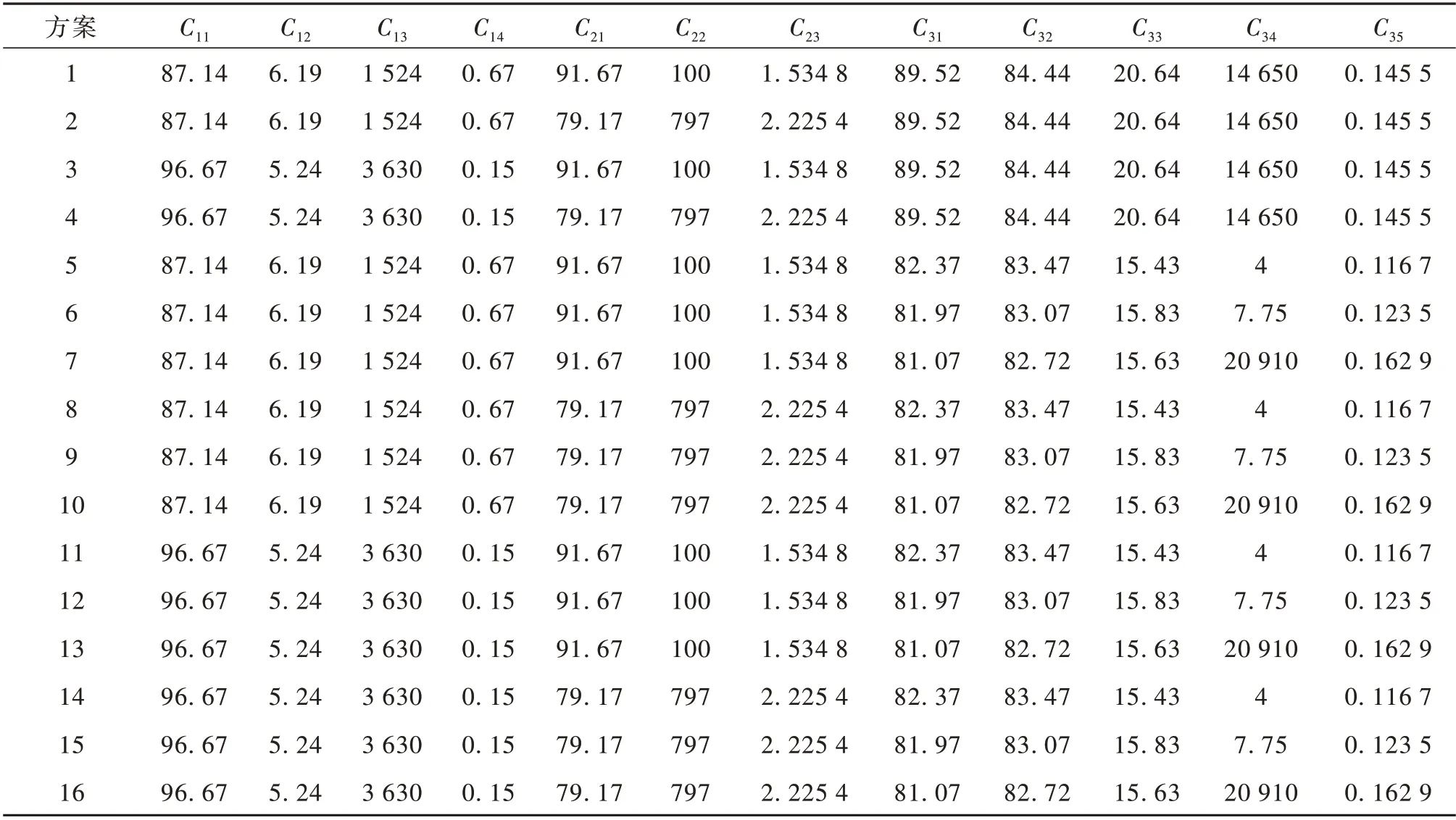
表3 智能化雷达信息处理性能评估指标值Table 3 Evaluation index value of intelligent radar information processing performance
4.1 改进AHM 法计算指标权重
邀请专家根据表1 所示的比例标度,对图3 中的一级指标B1,B2,B3分别进行两两比较,得到判断
矩阵:
同理,得出B1所属的4 个二级指标的判断矩阵B1,B2所属的3 个二级指标的判断矩阵B2,B3所属的5 个二级指标的判断矩阵B3:
由式(10)可得到评分标度判断矩阵
由式(12)可得到各指标的相对权重:组合向量WBi=(0.400 0,0.333 3,0.266 7);
组 合 向 量WC1j=(0.341 7,0.300 0,0.091 7,0.266 6);
组合向量WC2j=(0.500 0,0.116 7,0.383 3);
组 合 向 量WC3j=(0.280 0,0.215 0,0.245 0,0.075 0,0.185 0);
由式(9)可得到各指标相对于智能化雷达信息处理性能的权重
WAHM=(0.136 7,0.120 0,0.036 7,0.106 6,0.166 7,0.038 9,0.127 8,0.074 7,0.057 3,0.065 3,0.020 0,0.049 3)。
4.2 改进TOPSIS 法评估智能化雷达信息处理性能
表3 中各方案的指标值即为决策矩阵Y=(yij)m×n中各元素的值。由式(13)消除量纲影响,得到规范化决策矩阵
在图3 中,指标C11,C21,C31和C32为效益型指标,指 标C12,C13,C14,C22,C23,C33,C34和C35为 成 本 型 指标,由式(20)~(21)可计算出正理想解z*和负理想解z0:
z*=(0.262 6,0.228 4,0.136 9,0.077 2,0.267 6,0.044 0,0.200 7,0.267 1,0.253 0,0.226 6,0.000 1,0.210 9),
z0=(0.236 7,0.269 8,0.326 0,0.345 0,0.231 1,0.350 8,0.291 0,0.241 9,0.247 9,0.303 1,0.409 5,0.294 3).
由式(24)~(25)得到各方案与正、负理想解的灰色关联度
R*=(0.833 6,0.734 4,0.929 9,0.827 2,0.867 0,0.859 1,0.865 9,0.771 5,0.764 5,0.778 2,0.960 1,0.949 3,0.944 2,0.864 2,0.857 3,0.856 6),
R0=(0.844 7,0.933 3,0.752 0,0.845 5,0.847 3,0.850 6,0.853 2,0.935 0,0.938 3,0.947 0,0.769 0,0.772 3,0.760 5,0.856 7,0.860 0,0.855 3).
由式(26)得到各方案的灰色关联贴近度:
Qi=(0.496 7,0.440 4,0.552 9,0.494 5,0.505 7,0.502 5,0.503 7,0.452 1,0.449 0,0.451 1,0.555 3,0.551 4,0.553 9,0.502 2,0.499 2,0.500 4).
由式(13)~(19)可得出原TOPSIS 法中各方案的综合评估指数:
ci=(0.389 4,0.181 2,0.763 7,0.587 7,0.425 8,0.423 5,0.389 9,0.268 5,0.263 1,0.192 6,0.833 6,0.832 0,0.747 3,0.619 2,0.617 9,0.582 8).
方案1~4 中剩余杂波抑制方法为无监督学习,适用于初次架设,方案5~16 中剩余杂波抑制方法为有监督学习,适用于固定值班,2 类方案没有可比性。因此,2 类方案需要分开排序。根据改进后TOPSIS 法灰色关联贴近度Qi的大小,判定各方案的优劣性。适用于初次架设的方案排序为:方案3>方案1>方案4>方案2。适用于固定值班的方案排序为:方案11>方案13>方案12>方案5>方案7>方案6>方案14>方案16>方案15>方案8>方案10>方案9。由原TOPSIS 法综合评估指数ci的大小,得到改进前的TOPSIS 评估方法判定各方案的优劣性。适用于初次架设的方案排序为:方案3>方案4>方案1>方案2。适用于固定值班的方案排序为:方案11>方案12>方案13>方案14>方案15>方案16>方案5>方案6>方案7>方案8>方案9>方案10。
改进前后TOPSIS 法的评估结果中,适用于初次架设和固定值班的最优方案相同,均分别为方案3 和方案11。因此可认为,该型雷达智能化信息处理方案中,适用于初次架设的最优方案为方案3,即智能化检测技术采用YOLO 目标检测模型,智能化识别技术采用AlexNet 目标识别模型,智能化剩余杂波抑制技术采用竞争神经网络点迹分类模型。适用于固定值班的最优方案为方案11,即智能化检测技术采用YOLO 目标检测模型,智能化识别技术采用AlexNet 目标识别模型,智能化剩余杂波抑制技术采用BP 神经网络点迹分类模型。但原TOPSIS 法的评估结果中各方案的综合评估指数ci差异较大,例如最优方案11 的综合评估指数为0.833 6,最劣方案10 的综合评估指数为0.192 6,该评估结果与表3 中各方案评估指标值相近的现象明显不符。而改进TOPSIS 法的评估结果中各方案的灰色关联贴近度Qi差异较小,例如最优方案11 的灰色关联贴近度为0.555 3,最劣方案9 的灰色关联贴近度为0.449 0,该评估结果与表3 中各方案评估指标值相近的现象相符。因此,可认为改进TOPSIS 法的评估结果更符合实际情况。
5 结束语
本文的智能化雷达信息处理技术通过某型航管一次雷达在宽带工作模式下的雷达原始图像构建雷达图像数据集,开展基于YOLO 和Faster RCNN 的智能化目标检测研究;经过智能化雷达目标检测后,根据检测结果剔除雷达图像数据集中的杂波图像,将目标图像予以保留构建空中目标数据集,开展基于AlexNet 和VGGNet 的智能化目标识别研究;选取回波点迹的多普勒速度、回波原始幅度、回波背景幅度、滤波标志、恒虚警类型、杂噪比等级、滤波器组类型和EP 质量8 个特征构建雷达回波点迹数据集,开展基于竞争神经网络、BP 神经网络、GA-BP 神经网络和LVQ 神经网络的智能化剩余杂波抑制研究。文中的最优方案与目标特性并非完全没有关系,需要从目标回波数据中提取有效特征才能进行智能化信息处理。本文的智能化算法研究仅针对某型航管一次雷达探测军航和民航等空中目标的场景展开,具有一定的适用范围,对海面或地面目标是否适用还有待进一步研究。
本文根据智能信息处理包含的技术内容和影响因素,构建了智能化雷达信息处理性能评估指标体系,通过改进AHM 赋权法得到各评估指标权重,利用改进的TOPSIS 法对不同设计方案的智能化雷达信息处理性能进行评估,从而比较出最优的设计方案。该方法思路清晰、计算简单能够为智能化雷达的设计提供决策依据,具有一定的现实意义。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
中国石油大学胜利学院学报(2022年1期)2022-04-21 07:58:38
科学与信息化(2021年30期)2021-12-24 08:00:20
建材发展导向(2021年13期)2021-07-28 07:14:56
铁道通信信号(2018年11期)2019-01-19 01:14:50
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
铁道通信信号(2018年1期)2018-06-06 02:27:41
火控雷达技术(2016年3期)2016-02-06 02:30:26
西北工业大学学报(2015年3期)2015-12-14 13:08:44
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34