
基于ROS与YOLOv5s的智能车障碍物检测导航系统的设计
2023-11-17 03:01李文海李超荣黄莹飞
成都信息工程大学学报 2023年6期
李文海,李超荣,黄莹飞,张 弛,郭 伟
(马鞍山学院人工智能创新学院,安徽马鞍山 243000)
0 引言
障碍物检测与自主导航路径规划是智能车的基本任务,也是该研究领域的一大热点。由于路面环境的复杂性与多变性,智能车行驶过程中捕捉的画面常出现光线不足或过强,障碍物遮挡等情况,使通过传统数字图像处理方法进行检测存在识别准确率差、检出率低等问题[1]。深度学习算法以强大的特征表征能力和泛化能力,可有效缓解识别准度差的问题。目前深度学习目标检测算法广泛采用的是YOLO 系列算法,考虑到智能车存在的低算力限制,使用YOLOv5 系列中网络规模较小的YOLOv5s 算法框架[2],具有推理速度快、检测精度高的优势,适用于有限计算能力的智能车障碍物检测的应用场景。
自主导航算法根据环境感知程度的不同,可分为全局路径规划算法与局部路径规划算法。全局路径规划算法是在已知的环境中进行路径规划,而局部路径规划算法则是在未知环境或部分可知环境的情况下进行路径规划。全局路径规划算法较为经典的是A*算法[3]、Dijkstra 算法[4],由于算法结构简单、容易部署,常被广泛采用。局部路径规划算法更加侧重于当前的环境信息,对于效果较好的动态环境,常采用的是时间弹性带法(TEB)、动态窗口法(DWA)[5]。目前两种路径规划算法,多被单独采用,易出现路径规划失败或路径非最优解的情况。本文设计的系统融合全局路径规划A*算法与局部路径规划TEB 算法,可同时进行路径规划,从而有效改善上述问题。
1 系统架构
智能车由软件层、驱动层、硬件层3 部分构成。驱动层用于驱动底层硬件,软件层用于处理硬件层获取的数据。软件层包括ROS 操作系统与YOLOv5s 算法框架等,硬件层与驱动层主要包括各功能模组以及对应驱动,系统架构如图1所示。

图1 系统整体架构图
1.1 系统驱动与硬件架构
采用讯飞U-CAR 晓mini 版本智能车作为硬件平台,该智能车硬件架构如图2所示,主要分为上位机和下位机。上位机是智能车的中央控制系统,搭载Jeston Nano 处理器和各功能模组,负责智能车环境数据的处理与分析。智能车功能模组主要涉及单目摄像头、激光雷达和IMU 惯导模块。各功能模组需要搭载各自对应的驱动,以使单目摄像头获取图像数据,激光雷达采集环境信息,IMU 惯导模块测量智能车在三维空间中的角速度和加速度数据。下位机由STM32F4控制器、蓄电池、电机和麦克纳姆轮构成。控制器驱动程序驱动STM32F4,蓄电池为STM32F4 控制器供电,电机驱动麦克纳姆轮。以STM32F4 为核心组成的底层控制器,实现智能车的全方位移动。
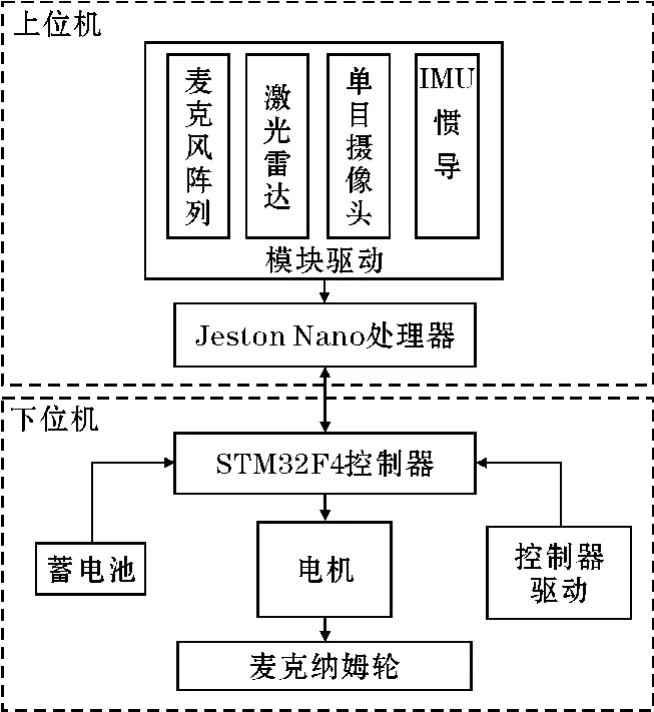
图2 智能车硬件架构图
1.2 系统软件设计
系统软件组成如图3所示,其核心功能是完成障碍物检测和自主导航。障碍物检测功能经上位机的单目摄像头获取视频流,通过YOLOv5s 模型实时输出障碍物检测信息。自主导航分为建图、路径规划和PID(proportional integral derivative)控制3 大模块。建图通过SLAM 激光雷达,使用Gmapping 算法[6]生成的2D 地图,采用粒子滤波方式,将激光与姿势数据收集并创建栅格地图。路径规划采用全局路径规划和局部路径规划融合的方式,全局路径规划采用A*算法进行构建,局部路径规划采用TEB(timed elastic band)算法实现。TEB 算法在全局路径规划的基础上,满足各种约束条件,生成局部路径。经规划得到转向与转速等信息,转由下位机STM32F4 控制电机的工作频率,进而改变麦克纳姆轮的速度与方向,实现PID 控制。

图3 智能车软件组成
2 基于ROS 的智能车路径规划算法
2.1 全局路径规划算法
全局路径规划是基于已知地图环境的静态路径规划算法,主要有A*与Dijkstra 两种算法[7]。Dijkstra 算法是一种广度优先搜索路径,优势在于得到路径多数较优,但缺陷在于每一个姿态点都需要遍历整个路径,效率低下,无法保证实时性。采用A*算法作为全局路径规划器,与Dijkstra 算法相比,优势在于引入启发路径代价函数,提高搜索效率。A*算法的启发路径代价函数F(x),包括起始位置到达当前搜索点位置的代价函数G(x)与当前搜索点位置到目标位置的代价函数H(x)。A*算法利用F(x)作为判定下一搜索点位置的优劣,依次进行,直至到达终点。表达式如下:
F(x)=G(x)+H(x)
2.2 局部路径规划算法
局部路径规划算法是在全局路径的基础上,结合实时更新的代价地图,规划出合理的轨迹。常见的局部路径规划算法含有动态窗口法(DWA)[8]、模型预测控制法(MPC)[9]、时间弹性带法(timed elastic bands,TEB)等。
动态窗口法是在速度空间多次采样,通过评估函数不断对不同的速度与轨迹进行评价,并按照得分最高的速度与轨迹执行。该算法存在避障效果差、前瞻性不足等问题。模型预测控制法原理类似于PID 控制器,以当前车辆与目标轨迹的差距作为评价函数,调整速度与前进方向。该算法存在计算量大,泛化能力弱等问题。时间弹性带法固定起始点与终点,可抽象为橡皮筋,皮筋上含有多个离散位姿约束,最终这些离散位姿组成的皮筋位置,即规划出的轨迹。TEB 模型优化了前两者的不足,有较强的前瞻性,避障效果好,但仍存在计算复杂度较大、速度和角度波动较大等问题。
2.2.1 TEB 算法原理
TEB 算法起源于EB(elastic bands),EB 算法规划出的曲线可分为多段,其曲线抽象为橡皮筋,起始点与终点由全局规划器指定后,由于受到外力的影响以及上一小段皮筋的形变,下一段的橡皮筋也会发生形变。橡皮筋有外力的影响,自然就有收缩力与之达到力平衡,平衡后的曲线即最优路径。在EB 算法的基础上,相邻的运动状态之间引入时间的概念,便于刻画运动状态,即为TEB 算法[10],具体轨迹示例如图4所示。

图4 TEB 算法轨迹示例
2.2.2 轨迹约束条件
TEB 算法中的外力就是各个状态下的约束条件,包括跟随路径与避障约束、速度或加速度约束、运动学约束等。
(1)跟随路径与避障约束
跟随路径约束与避障约束相互制约,跟随路径施加外力将橡皮筋拉向全局路径,避障约束施加外力使得橡皮筋远离障碍物,二者受力方向恰好相反,图5所示为xi到xi+2的3 种姿态关系。从xi到xi+1,跟随路径施加外力使得与全局路径差距逐渐缩小,但与此同时智能车不断靠近障碍物,距离也逐渐减小,容易碰撞到障碍物。所以,避障约束施加外力使之远离障碍物,xi+1到xi+2的距离d逐渐增大。

图5 跟随路径与避障约束受力图
(2)速度或加速度约束
橡皮筋上的姿态点定义为一个向量[xi,yi,θi]T,包含3 个基本属性:坐标x、y和偏转角度θ。智能车速度过快可能会因为麦克纳姆轮的抓地力不足,产生打滑现象。而速度过慢,则完成路径时间长,性能达不到要求。因此,本文对速度和加速度进行限制,即速度和加速度均要在最小值和最大值之间:
Vmin≤Fv(B)≤Vmax
amin≤Fa(B)≤amax
(3)运动学约束
智能车要在满足正确规划出路径且避开障碍物且不碰撞的前提下,尽量提高速度,行驶最优规划路径。
2.2.3 基于图优化的目标函数求解
图优化是通过节点和边来表示路径中各姿态之间的关系,节点为优化变量,边为优化变量之间的限制条件,目标函数求解可通过图优化转化为待优化顶点与待优化边的问题[11]。
智能车轨迹运动得到的目标函数是非线性的,非线性问题求解过程会消耗过多算力资源。因此须简化模型,将连续运动的曲线近似于无数多个离散的位姿,这样非线性问题就可转化为线性问题来求解。通过图优化来优化离散的位姿,使最终的离散位姿组成的轨迹能够达到时间最短、距离最短、远离障碍物等目标,同时满足所有的轨迹约束条件。具体TEB 算法流程如图6所示。

图6 TEB 算法流程图
3 基于YOLOv5s 的障碍物检测算法
3.1 数据集与预处理
实验数据集由智能车摄像头采集,共计图片4600张,分为6 类,分别为人、自行车、汽车、摩托车、卡车、三角锥。为更好地表征学习,提升数据集的规模,对数据集进行不同程度的模糊处理、添加噪声、亮度变化、旋转等操作,如图7所示。将数据集扩充至7000 张,按照8 ∶1 ∶1 的比例划分为训练集5600 张、验证集700 张、测试集700 张。
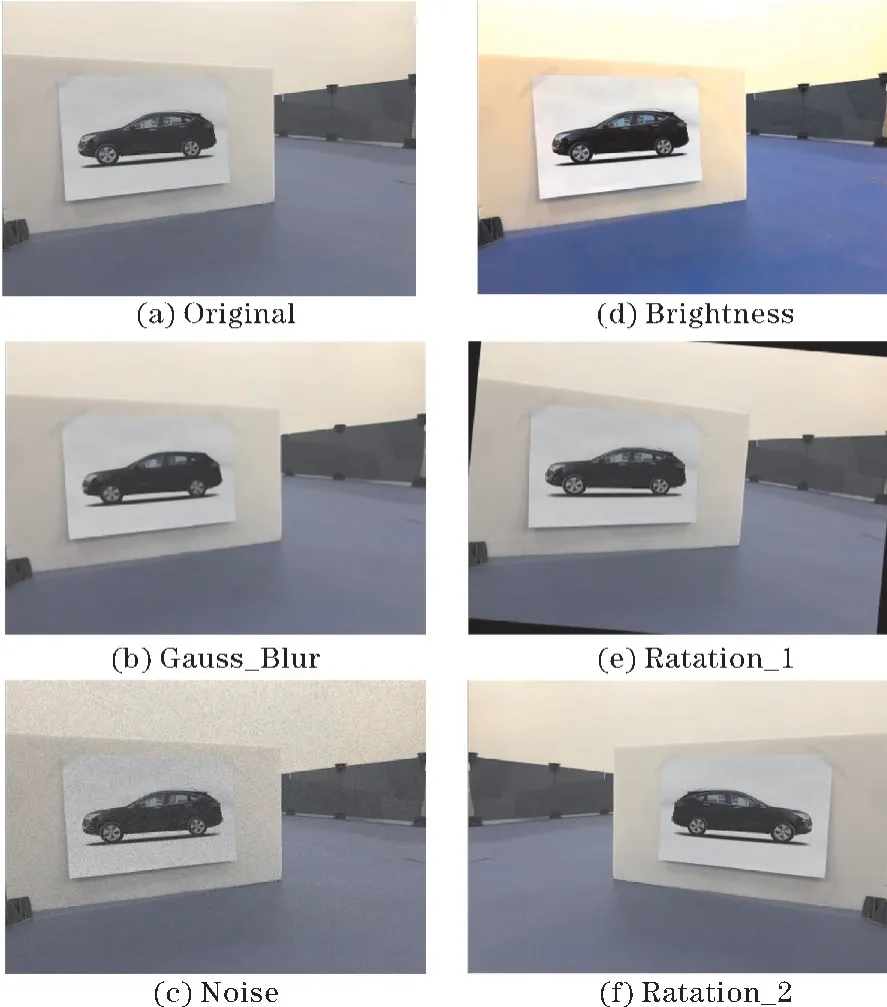
图7 数据增强
3.2 YOLOv5s 网络模型
YOLOv5 根据不同的网络深度和网络宽度,可分为YOLOv5s、YOLOv5m、YOLOv5l 以及YOLOv5x[12]。考虑到智能车低算力的情况,采用网络规模较小的YOLOv5s 模型进行障碍物检测,在保证高准确率的前提下仍可保持较快的识别速度。
YOLOv5s 网络结构如图8所示,该模型由输入网络(Input)、骨干网络(Backbone)、颈部网络(Neck)、检测网络(Prediction)构成[13]。输入网络中增加自适应锚框计算和图片缩放等操作;骨干网络和颈部网络采用不同的CSP 结构,丰富梯度组合的同时减少计算量;检测网络中针对不同大小的目标,采用不同尺寸的特征图进行预测。

图8 YOLOv5s 网络结构
3.2.1 输入网络
YOLOv5s 模型在输入网络中分别使用Mosaic 数据增强、自适应锚框计算和自适应图片缩放3 种操作。Mosaic 数据增强是由CutMix 数据增强演变而来,Cut-Mix 利用2 张图片拼接,而Mosaic 利用4 张照片拼接,拼接的同时采用随机裁剪、随机缩放和随机分布的方式丰富数据集,使模型的鲁棒性提升。据先验知识可知,将数据集图片统一尺寸,检测效果会更佳。若直接对不同尺寸的图片,进行拉伸、收缩等操作,会造成图片失真。针对这一情况,输入网络中使用自适应图片缩放技术对图片进行缩放填充,即先将图片较长的边缩放至预设尺寸,短边通过灰色像素点填充。
3.2.2 骨干网络
骨干网络由Focus、CSP 以及SPP 模块构成,主要作用是对图片进行特征提取。Focus 模块主要作用是在空间关系没有被破坏的同时,增加感受野区域,由切片和卷积操作两部分组成。以640×640×3 的一张图片为例,在每个通道间隔采样就得到320×320×3 的特征矩阵,再经由32 层卷积核卷积操作得到320×320×32 的特征矩阵,即得到无信息丢失的二倍下采样特征图。YOLOv5s 模型设计了两种CSP 结构,这种结构减少了网络参数数量,其中CSP1_X 应用于骨干网络中,另外一种CSP2_X 应用于颈部网络中。骨干网络中的CSP模块将浅层特征图一分为二,一部分通过X个残差单元(ResUnit)向后传播,与之直接卷积后的特征进行拼接,而颈部网络中的CSP 模块将X个残差单元替换成2X个CBL 模块。SPP 模块目的是提取到更有益的特征信息,采用3 种同一步长、不同卷积核尺寸的最大池化下采样,与不进行任何处理的特征图拼接,再通过卷积层实现降维。
3.2.3 颈部网络
颈部网络引用PANet 的思想,采用FPN(feature pyramid networks)与PAN(perceptual adversarial network)结构,如图9所示。FPN 结构通过自顶向下进行上采样,使底层特征图包含更强特征信息。与之相反,PAN 结构是自底向上的,将高层特征通过下采样和低层特征融合。

图9 FPN 与PAN 结构
3.2.4 检测网络
检测网络接收上层颈部网络输出的3 种融合特征图后,各通过一次卷积操作,得到3 种不同尺寸但维度相同的特征矩阵,用来检测不同尺寸的物体。其大小分别为80×80×255、40×40×255、20×20×255,分别对小、中、大的物体进行检测。
4 超参数设置与评价指标
4.1 训练环境参数
为减少训练时间,GPU 采用 RTX 3080Ti,YOLOv5s 模型的训练环境配置如表1所示。

表1 训练环境配置
4.2 模型超参数
YOLOv5s 模型超参数设置如表2所示,模型迭代次数(iters)为500,根据服务器性能指标,将批次(batchsize)设置为32,学习率(learning_rate)作为影响网络的关键因素,将其设置为0.001。学习率值过大容易造成模型不易收敛,从而忽略最优值;而过小容易造成模型收敛缓慢,达到最大迭代次数时,仍没有找到最优解。权值衰减系数(weight_attenuation_coefficient)设置为0.0005,置信度(confidence)设置为0.6,即过滤置信度低于0.6的候选框。
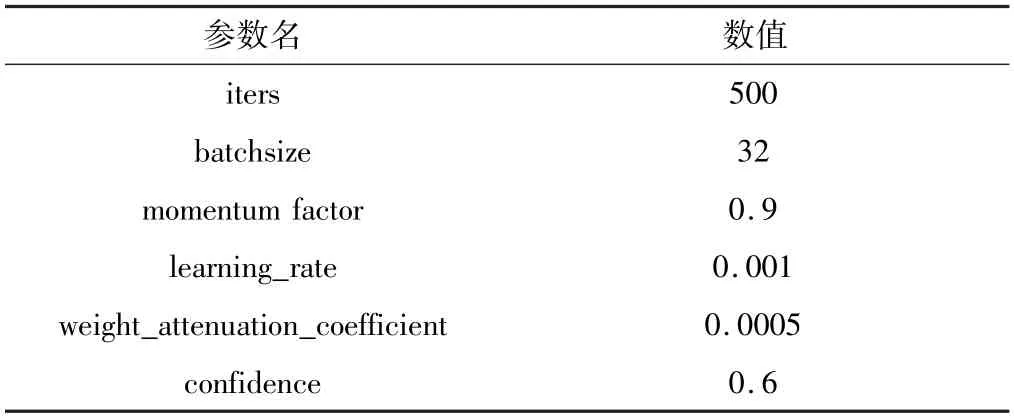
表2 超参数设置
4.3 路径规划参数
智能车的路径规划参数对于能否规划出正确的路径,行驶的稳定性尤为关键。调试过程中使用动态调参工具调参,在RVIZ 中可看见仿真环境地图。ROS 中的TEB 功能包有智能车速度运动参数文件teb_local_planner_params.yaml、损失参数文件costmap_common_params.yaml、全局代价地图参数文件global_costmap_params.yaml、局部代价地图参数文件local_costmap_params.yaml,其重要参数、变量值及其含义如表3~表6所示。

表3 teb_local_planner_params.yaml 参数

表4 costmap_common_params.yaml 参数
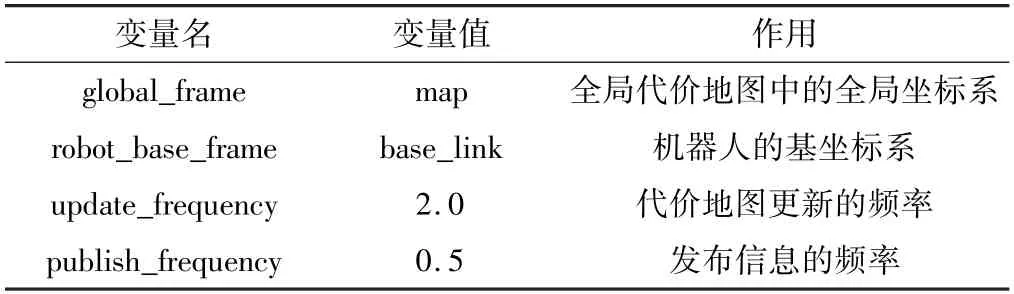
表5 global_costmap_params.yaml 参数
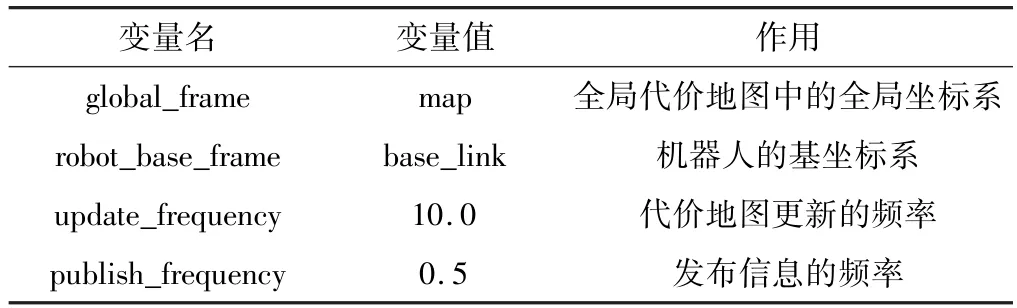
表6 local_costmap_params.yaml 参数
4.4 评估指标
YOLOv5s 模型采用精确率(Precision)、召回率(Recall)、调和值(F1)平均精度(AP)和平均精度均值(mAP)作为评价指标。精确率是所有预测为正样本的结果中,预测正确的比率。召回率是所有正样本的结果中被正确预测的比率。调和值是精确率与召回率的调和平均数;平均精度是横坐标为召回率,纵坐标为精确率的二维曲线积分值。具体表达式如下:
5 实验测试与结果分析
5.1 YOLOv5s 检测结果与分析
将服务器上训练好的YOLOv5s 模型在测试集上进行测试,结果如表7所示。由表7 可知,模型对人和三角锥的检测效果最佳,对与人这一类别的平均精度高达99.5%,三角锥类别平均精度为99.3%,其调和平均值F1分别为97.7%和98.1%。这两类别效果好的原因在于,人在数据集中的占比较多,且三角锥颜色、形状等特征容易区分。摩托车类别在该模型上效果欠佳,平均精度仅达到92.6%。出现这种情况是由于摩托车在路面行驶速度较快,不易捕捉类别特征。综上,YOLOv5s 的模型检测结果符合实验预期,各类别平均精度均保持在92%以上,最高可达到99%以上,满足智能车行驶途中高精度的需求。

表7 模型检测结果 单位:%
5.2 联调测试结果与分析
本文采用RVIZ 可视化呈现联调实验过程。首先导入栅格地图,如图10(a)所示。该图使用Gmapping功能包建立完成,图中的智能车需不断移动直至扫描完全,受智能车抖动以及激光雷达精度影响,地图边界存在厚度不均匀现象。为保证实验严谨性与规范性,优化后的栅格地图如图10(b)所示。之后,运行YOLOv5s 模型对障碍物进行检测。最后,通过RVIZ中的2D_positive 工具,发布坐标信息,使小车到达指定地点,完成自主导航任务。

图10 栅格地图
本次实验分别发布3 个目标点进行路径规划测试并进行障碍物检测,实验场地具体放置如图11所示。鉴于场地限制,障碍物由障碍物图片代替,水平贴墙放置,图中蓝色粗线为障碍物放置点。智能车起点位于地图左下角,终点分别为3 个终点位置。通过RVIZ分别发布3 个目标点,进行联调测试。

图11 实验场地图
智能车路径规划情况与障碍物检测情况,分别如图12、图13所示。智能车能够基于全局路径规划A*算法与局部路径规划TEB 算法,完成起点与终点的路径规划,3 个不同目标点均能够正确规划出路线。障碍物检测方面,通过YOLOv5s 模型,能够精准检测出障碍物。

图12 路径规划情况

图13 障碍物检测情况
本次实验记录了碰撞情况、障碍物误测情况、导航情况等。为避免偶然性的发生,实验分为3 个终点,每个终点进行30 次重复实验,共计90 次实验。任务过程中无碰撞与误检,且成功路径规划,视为任务成功,实验结果如表8所示。智能车路径规划的导航平均成功率为96.67%,导航时长随着路线的长短依次增加,平均用时最快20.35 s,最慢27.53 s;障碍物检测方面,每组实验障碍物检出率均为100%,最多误检2 次,最低误检1 次,在允许误差的范围内,能够达到高准度的要求;最终任务成功率分别为93.33%、90.00%、96.67%,均高达90%以上。搭载该系统的智能车能够完成障碍物检测、自主导航的任务,具有障碍物检测准确率高,泛化能力强,自主导航规划路径速度快、稳定性强的特点。实验联调测试结果表明,搭载ROS与YOLOv5s的智能车具有自主导航稳定性强,障碍物检测准确率高的特性。
6 结束语
设计了一种ROS与YOLOv5s的智能车动态障碍物检测导航系统。以Jeston Nano、STM32F4、SLAM 激光雷达、单目摄像头、麦克纳姆轮等作为硬件基础,以ROS 操作系统与YOLOv5s 目标检测算法框架作为软件基础。实验结果表明,搭载该系统的智能车能够完成障碍物检测、自主导航的任务,路径规划平均成功率达到96.67%,障碍物检测准确率在92%以上,综合任务成功率在90%以上,具有障碍物检测准确率高,自主导航路径规划稳定性强的特性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
金桥(2018年4期)2018-09-26
领导决策信息(2018年50期)2018-02-22
商周刊(2017年5期)2017-08-22
中国卫生(2016年2期)2016-11-12
中国工程咨询(2016年4期)2016-02-14
中国卫生(2014年5期)2014-11-10
