
某船对转舵桨推进系统紧急倒车过程仿真
2023-11-17 13:33:21常书平史孝华方先进陈福良
广东造船 2023年5期
常书平 史孝华 方先进 陈福良


摘 要:基于Matlab/Simulink平台建立了某保障船推进系统仿真模型,开展了紧急倒车过程仿真和机动性分析。采用PI控制器设计机—桨联合控制方法,对倒车过程中对转舵桨的转向和柴油机的转速进行调控,得到柴油机的临界转速,此时对转舵桨的转向快慢将不会造成柴油机超负荷现象;针对全速航行条件下的紧急倒车过程,提出了对转舵桨转向时间与柴油机减速时间匹配图谱。所得结论对于制定船舶紧急倒车工作制、保护柴油机安全运行、挖掘机动性具有指导意义。
关键词:船舶;对转舵桨;倒车;仿真;负荷控制
中图分类号:U661.33 文献标识码:A
Simulation of Emergency Reversing Process of Ship's
Contra-Rotating Azimuth Propulsion System
CHANG Shuping1, SHI Xiaohua2, FANG Xianjin3, CHEN Fuliang1
(1. No. 63983 Unit of PLA, Wuxi 214035; 2. Representative Office of Land Force, Qingdao 266002;
3. Guangzhou Marine Engineering Corporation, Guangzhou 510250 )
Abstract: Based on Matlab/Simulink platform, a simulation model of the propulsion system of a certain support ship was established, the simulation and mobility analysis of emergency reversing process was carried out. The PI controller was used to design the engine-propulsion joint-control method, which could control the propulsion steering and the engine speed in the course of reversing. The critical speed of the diesel engine was obtained, and the propulsion steering speed would not cause the overload of the diesel engine. The matching diagram of the steering time and the deceleration time was presented as for the process of emergency reversing when navigating at full speed. The conclusions are of guiding significance for establishing the emergency reverse system, protecting the reliable operation of diesel engine and excavating maneuverability.
Key words: ship; contra-rotating azimuth propulsion; reversing; simulation; load control
1 前言
紧急倒车是船舶动态工况中的常用应急工况,如何提高船舶在该过程中的机动性,是业内长期关注的问题之一。一般来讲,在紧急倒车过程中,柴油机的转速越高、推进器推力由正车转为倒车的时间越短,则船舶减速越快、停车距离越短、机动性越好。但柴油机在正常工作范围对输出功率有限制,由此要求柴油机和推进器两者匹配操作,使在不超负荷运行情况下将紧急倒车过程的机动性充分发挥出来。
对转舵桨是一种兼有常规螺旋桨和方向舵兩种功能的船舶推进器,其装有固定螺距、同轴对转的前桨和后桨,由液压系统驱动螺旋桨可绕中心轴做360°回转,可为船舶提供全方位推力[1]-[2]。本文以某采用双套柴油机—对转舵桨动力装置的保障船为研究对象,建立了推进系统的仿真模型,对紧急倒车过程进行研究,寻求和优化紧急倒车过程的机—桨匹配控制方法。
2 建模流程
Matlab是一款集工程计算、图形绘制、系统设计为一体的仿真软件,在科学研究和工程研发中得到广泛应用。Simulink是Matlab中的一种可视化仿真工具,它基于Matlab的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中,可用于动态系统和嵌入式系统的多领域仿真,是一种基于模型的设计工具。对于各种时变系统,包括通信、控制、信号处理、视频处理和图像处理,Simulink提供了交互式图形化环境和可以定制的模块库对其进行设计、仿真、执行和测试,可以用连续采样时间、离散采样时间或混合的采样时间进行建模,它也支持多速率系统,即系统中不同部分具有不同的采样速率。
Matlab/Simulink建模的基本步骤:首先对建模对象进行分析,明确Simulink建模所需的功能模块,即确定实现既定仿真模型的思路和方法;其次,建立一个新的Simulink模型窗口,选择模块,根据系统的数学描述选择合适的模块添加到模型窗口中;再次,按照信号从左(输入端)到右(输出端)的流向原则将模块放置到合适的位置,模块从输入端至输出端用信号线相连,搭建完成方框图,形成既定的模型;然后,根据模型的数学描述及其约束条件,对相关模块的参数进行设置,使各模块的参数与模型的数学描述一致;之后,启动仿真参数对话框,对仿真算法、起止时间、误差容限、结果输出和储存的方式进行设置,也可对仿真过程中的错误处理方式等进行设置;最后,运行仿真模型,得到仿真结果;通过对仿真结果的分析,调整仿真参数,重新进行仿真,直至得到理想的仿真结果。
3 仿真模型
根据推进系统的结构组成和能量传递关系,将其分为柴油机、调速器、推进器、船阻力、轴系及传动等多个功能相对集中的模块[3]。基于Matlab/Simulink軟件平台建立各模块的仿真模型,并用信号线将各模块的输入、输出相互连接,构成船体—柴油机—推进器系统仿真模型,如图1所示:柴油机模块采用设计数据与实验数据相结合的方法,即柴油机功率与转速、齿条位置的数学模型和柴油机功率限制模型、柴油机功率与转速和燃油齿杆位置由神经网络插值得到;为限制柴油机的最大功率, 建模时采用输出功率与对应转速下的最大功率进行比较,船体模块和推进器模块建模的详细过程同文献[4],采用变步长、四阶龙格库塔法对仿真模型进行求解;基于实船稳态正车试航数据对仿真模型进行校验,四个车令工况下柴油机功率、航速的最大误差分别为5.39%、1.5%,说明该仿真模型在工程上具有较好的可信度[4]。
考虑到正常倒车时柴油机功率与功率限制线之间有差别的特点,利用Ziegler-Nichols方法设计PI控制器[4-5],以功率冗余量对柴油机转速和对转舵桨转向实施控制。PI控制器的数学模型为:
式中:U(t)为控制器输出;e(t)为柴油机发出功率与功率限制线之间的差值;Kp为比例系数;Ti为时间积分常数。
为增加燃油齿杆位置的范围对柴油机转速响应的调节控制,在调速器的输出端加入饱和特性模块,并取其输入、输出之差反馈到积分环节,避免饱和特性模块可能带来的控制效果恶化问题。
PI控制器仿真模型如图2所示。为了使推进系统各参数在紧急倒车始点保持稳定,设置仿真时间开关,当仿真时间小于500 s时PI控制器不起作用。
4 柴油机转速不变时的紧急倒车
设置对转舵桨的转向时间为10 s,调整柴油机转速,使其在整个紧急倒车过程中不超负荷。根据仿真结果来看,当柴油机转速为1 400 r/min时,柴油机不会超负荷,该过程中柴油机功率和航速随时间的变化如图3、图4所示,柴油机功率在倒车过程中先增加后减小,这是由于在转向过程中,产生的推力不是沿船首方向,含有侧向分量,因此推进系统效率会降低,导致柴油机发出的功率增加;当转向完毕后,推力完全沿船尾方向,柴油机功率会下降,因为倒车阻力较正常阻力更大,柴油机功率稳定后还是要高于正车功率,此时停车滑行时间为28.5 s,停车滑行距离为123 m。
分别设置对转舵桨的转向时间为20、30、40 s,调整柴油机的转速,使其在整个紧急倒车过程中不超负荷。根据仿真结果,当柴油机转速高于1 400 r/min时,不同转向时间下会出现不同程度的超负荷现象;当柴油机转速为1 400 r/min时,对转舵桨的转向时间变化对柴油机负荷影响不大,均不超负荷。在不同转向时间下紧急倒车过程的停车时间和停车滑行距离,见表1。
5 全速航行时的紧急倒车
当柴油机保持额定转速全速正车航行时,柴油机发出功率已与功率限制线很接近,由于倒车阻力比正车阻力要大,若保持额定转速不变,对转舵桨换向倒车后必然会导致柴油机超负荷工作,因此,全速航行时若紧急倒车,柴油机必须先减速。根据研究结果,若转速降到1 400 r/min,对转舵桨再转向不会出现超负荷现象,从提高机动性来讲,在降转速的同时对转舵桨同时转向会更快达到紧急倒车的目的,但是要注意两者时间上的匹配控制。
先设定对转舵桨转向时间为10 s,柴油机初始转速为额定转速1 950 r/min,在倒车过程中以一定的速率逐渐降至1 400 r/min,使其在整个紧急倒车过程中不超负荷。根据仿真结果,当柴油机降速时间为30 s时,柴油机不会超负荷,柴油机功率、转速和航速随时间变化如图5所示;当降速时间超过30 s,柴油机会出现超负荷现象;降速时间为40 s时柴油机功率、转速和船航速随时间变化如图6所示。经计算,减速时间为30 s时,停车时间为26 s,停车滑行距离为139 m;减速时间为40 s时,停车的时间为25 s、停车滑行距离为134 m。
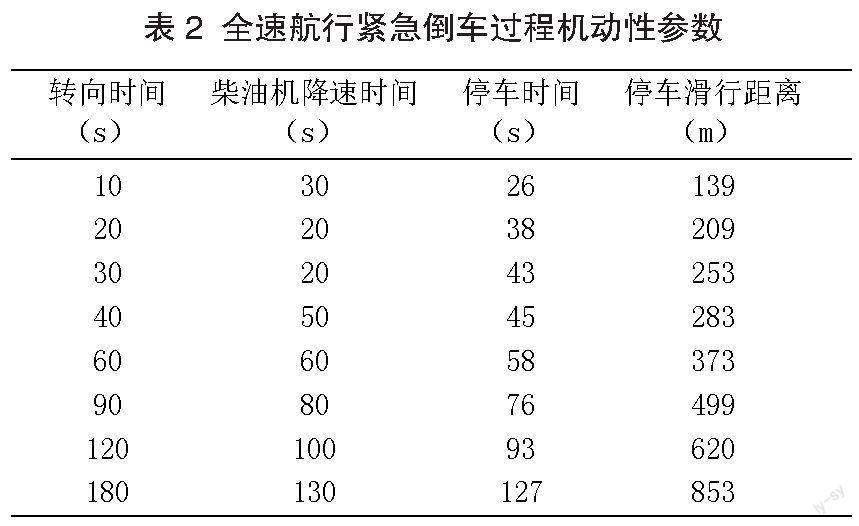
采用相同的方法计算多个工况,得到多个对转舵桨转向时间条件下所对应的使柴油机不超负荷的降速时间,如图7所示。
在确定对转舵桨的转向时间后,即能确定柴油机的临界降速时间,当柴油机的降速时间小于临界时间时,都能保证紧急倒车过程中柴油机不超负荷;从机动性角度来讲,对转舵桨转向时间越短、柴油机降速时间越长,则倒车过程的机动性越好。表2给出了对转舵桨转向时间下最优的机动性,供相关使用部门参考。
6 结论
本文基于Matlab/Simulink软件建立了某保障船推进系统的仿真模型,通过开展紧急倒车过程仿真计算,对制定船舶紧急倒车工作制、保护柴油机可靠运行提出了建议。当柴油机转速不高于1 400 r/min时,对转舵桨转向时间的变化对柴油机负荷影响不大,能够保证紧急倒车过程柴油机不超负荷;在全速航行条件下紧急倒车时,给出了对转舵桨转向时间与柴油机降速时间的匹配联控曲线,实现在柴油机负荷允许范围内最大限度地挖掘机动性能。
参考文献
[1]侯立勋, 王超, 黄胜. 对转桨综合设计方法研究[J]. 华中科技大学学报(自然科学版), 2014, 42(1).
[2]侯立勋, 胡安康, 尹林林. 对转舵桨水动力性能理论分析[J]. 船舶力学, 2020, 24(2).
[3]黄斌, 王永生. 船舶加速过程最优机—桨联控方法仿真研究[J]. 四川大学学报(工程科学版), 2011, 42(增刊1).
[4]常书平, 李昆鹏, 崔益烽. 船舶对转舵桨推进系统建模仿真[J]. 军事交通学院学报, 2021,23(12).
[5]王永生. 全柴联合动力装置稳、动态特性和工作制研究[D]. 武汉:华中科技大学, 2005.
[6]黄斌, 王永生. 基于PI控制器的船舶加速过程负荷控制[J]. 西南交通大学学报, 2012, 47(5).
[7]黄斌, 王永生. 柴燃联合动力装置单机失效工况下的紧急倒车过程仿真[J]. 船舶工程, 2011, 33(4).
猜你喜欢
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
军工文化(2017年12期)2017-07-17 06:08:06
中国船检(2017年3期)2017-05-18 11:33:09
科技资讯(2016年18期)2016-11-15 20:09:22
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
