双频识别声纳技术在长江河段护岸抛石水下监测中的应用
——以南京大胜关水下抛石为例
2023-11-17 04:48陈智贵陈小威
水利科技与经济 2023年11期
陈智贵,陈小威,龚 浩,宋 力
(1.江苏省水利科学研究院 材料结构研究室,江苏 扬州 225002;2.江苏九星建设工程有限公司,江苏 宿迁 223800;3.江苏熙利建设有限公司,南京 211100)
近年来,水下成像探测技术在国内外受到广泛关注,相关技术在水下成像研究领域取得长足进步。但由于长江河段水域泥沙、水体悬浮物含量高,造成大部分水域水体可见度较低,目前广泛适用于海洋领域的激光水下成像系统、微波电视成像系统等无法在浑浊的长江河段水域取得理想的效果[1]。而双频识别声纳系统(DIDSON)是一套基于声学透镜技术的成像系统,DIDSON系统可以在水体浑浊及光线条件差的情况下实现高清晰成像,形成影像质量级的物体图像。
本文采用双频识别声纳系统,对长江南京河段护岸工程区域进行监测,对于研究不同护岸工程型式的运行效果,正确认识河势演变规律具有十分重要的意义。同时,对于正确总结长江南京河段护岸工程经验教训[2-3],为长江南京河段岸线治理工作提供技术服务及指导也具有重要意义。
1 双频识别声纳系统(DIDSON)简介
传统的水下结构检查主要依靠潜水员潜入水下探摸检查,但潜水员潜水探摸开展难度较大。如果探测面积较大,则费时费力,且无法进行全面探摸,并且水下工作危险性也较高,在水流湍急的流域更难以进行。DIDSON水下成像系统主要应用于水下地形及地貌、海洋生物研究、水下环境监测等众多领域,在水下成像可读性、高分辨率及人机直观性方面具有显著优势,可实现水下结构物成像的高清晰化。当前,国内外DIDSON系统主要应用红外线、可见光及激光等光谱波段,结合微电子光发射机理,由此推进的水下机器人探测技术得到显著提高,如遥控航行器(ROV)及自主式水下航行器(AUV)等,广泛应用于海洋开发各种领域。
鉴于水下成像技术的直观性等特点,有学者将之运用到内陆水域水利工程检查等方面,以期可以直观看到水下构筑物的真实形态,更好地对水工建筑物及水利工程进行管理。但由于国内水域的复杂性,如泥沙含量高、水体浑浊等,无线电波和光波等在水中传播的距离很短,在海洋领域应用效果较好的光谱波段(包括可见光、红外和激光等)水下成像系统无法得到预期效果[4]。
近年来,水下成像探测技术被广泛应用于海洋环境、海洋工程、水下管道检测等领域。在高频率段,可简易完成双频声纳探测目标成像;在低频率段,因声波传播距离相对较远,可充分利用声波回纳信号频率谱特征,进行各类船只的音噪识别。声波在水中衰减较小,在内河流域能一定程度克服水体浑浊度的影响,起到较好效果。因此,引进双频识别声纳系统(DIDSON)对长江南京河段水下护岸工程区域进行扫描,以观察不同护岸工程的运行效果,该系统能较好地替代传统潜水员潜水探摸,对水下结构物进行检查。
2 双频识别声纳系统工作原理
DIDSON系统基本原理:利用回声探测仪,发射不同能量、不同频率的双频声波,监测不同范围内水下目标控测物的形状、大小、位置及形态特征。
双频识别声纳系统是一套基于声学透镜技术的成像系统,又称为水雷成像声纳。该系统类似于一台水下声学摄像机,可在水下形成清晰的物体图像(相当于视频质量),在可视条件差的浑浊水体环境条件下生成高品质质量图像的效果。双频识别声纳图像识别系统是当前为数不多采用发射声频替代可视镜头在浑浊水体监测水下物体的高清成像声纳设备,其工作原理是基于声学透镜的成像系统,可以自动调节焦距。
DIDSON最早由美国海军进行研发,主要应用于在浑浊的水体中实现搜寻水雷,是一种新型非接触式探测设备,为了保障潜水员的安全,系统于1997年研发成功,又称为水雷成像声纳(Limpet Mine Imaging Sonar,LIMIS)。2002年以后,Sound Metrics Corp公司将其商业化,并成功运用于民用领域。目前,已广泛应用于水产渔业、水下结构、管道检查、水体探测等方面。系统应用效果图见图1。
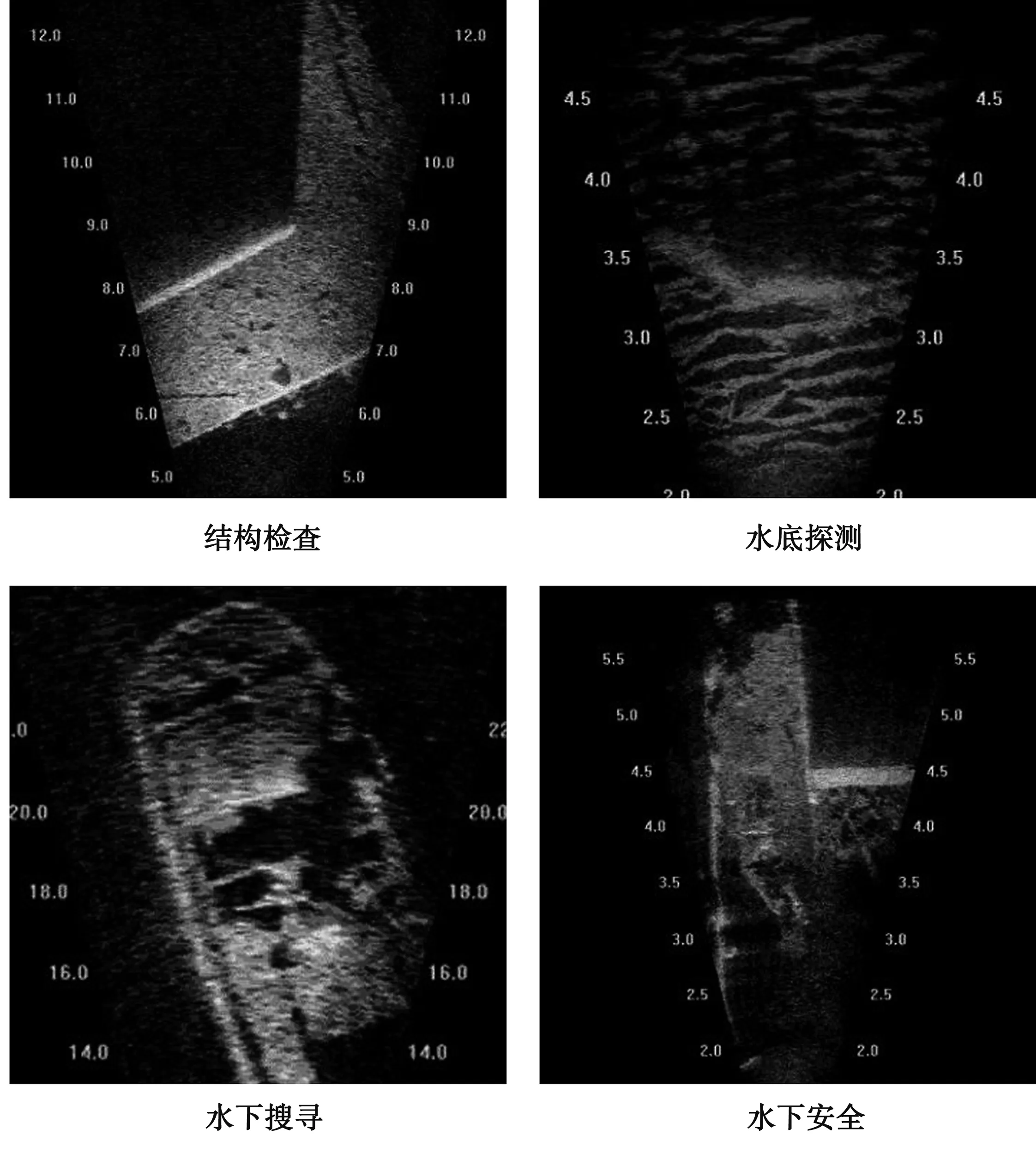
图1 DIDSON双频识别声纳系统工作效果图
由于系统采用声纳成像,所得图像没有颜色,只有明暗度。该系统具有不用接触物体,对水体的浑浊度没有要求,使用简单,能实时得到所观测物体的“视频”画面等优点。DIDSON(300m型)双频识别声呐主要工作参数见表1。
3 长江南京大胜关河段抛石区域概况
长江河段大胜关水下抛石实施区域位于梅子洲境内,长江梅子洲分汊河道段属于顺分汊河段,上源头为下三山,下游至下关境内。主要区域自上游而下,分布于梅子州及梅子州下游潜州。长江主流线路从七坝过渡至大胜关右岸处,而后进入梅子州左汊,再经梅子州左侧岸壁流入潜州左汊岸,同梅子州右汊水流相汇合后流入下游浦口段。该区域水下抛石双频识别声纳监测区位置见图2。

图2 大胜关水下抛石多波束监测区位置示意图
4 抛石区域双频识别声纳测量成果
大胜关水下抛石区域双频识别声纳测量对选定区域进行全覆盖扫描,系统采用高频状态、识别模式工作,扫描距离在5m以内,扫描成果见图3。
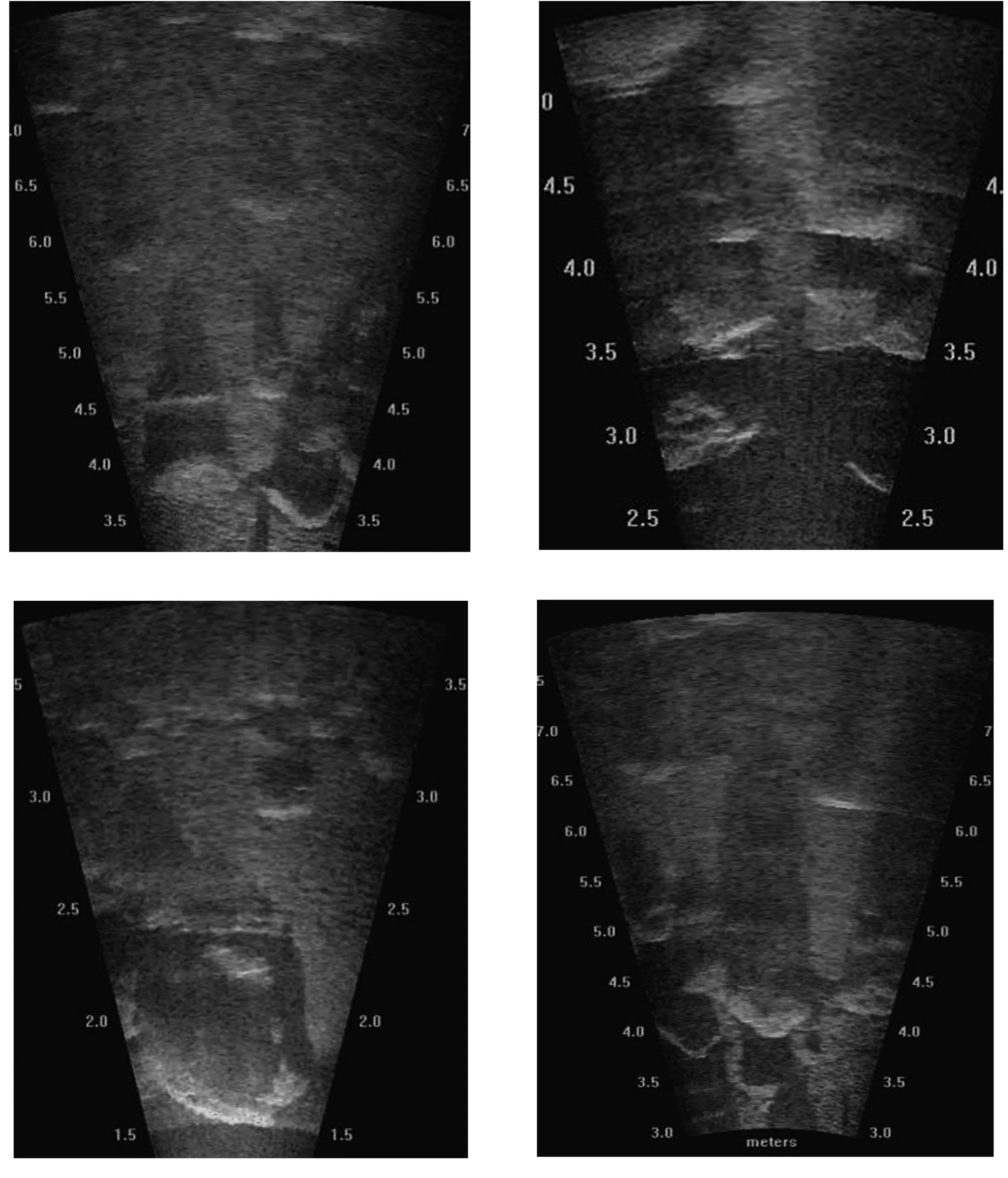
图3 大胜关水下抛石区域双频识别声纳扫描成果图
由以上4幅双频识别声纳扫描成果图可以看出,抛石底部区域大部分已陷入泥沙中,该区域抛石对于促淤起到了一定效果[5]。但大部分区域块石经过水流的冲刷,均有不同程度的流失,直径大的石块相应保留较完好[6-7]。
5 水下抛石护岸型式运行效果分析
大胜关水下抛石区域位于南京河段梅子洲河段,为长江南京河段整治工程大胜关护岸防护工程组成部分,抛石施工于2005年12月开工,2006年5月完成所有抛石工作。大胜关岸段河宽较窄,修建桥梁等水下工程建筑物对河势影响较大,南京长江三桥及高速铁路桥的建设引起附近区域河床及桥墩处的一系列冲刷,目前长江三桥附近已出现45m冲刷坑。
长江河段大胜关区域为南京河段水下岸坡深槽发育最深、护堤滩地最狭长、岸坡坡比最陡之处。近年来,该岸段深槽发育明显,2003年该岸段开始出现两个-45m槽,槽总长约0.8km;2005年两个槽并成一个,槽长约1km;2006年-45m槽增长至1.1km,并在上游新出现一个-45m冲刷坑;2007年-45m槽下游又新增3个-45m冲刷坑,-45m槽尾下延320m。
三桥下游至梅子洲入口处-5m河槽缩窄,左岸0m线淤积右移180~300m,-5m岸线右移200~250m。大胜关到梅子洲左汊-30m槽2006年连通,与2009年相比有所淤积,槽尾淤积上移140m。
三桥下游深槽拓展发育,-40和-45m深槽横向发展,槽宽拓展。-45m深槽与2010年相比,槽宽增加约20m,现槽宽为65m;-40m深槽与2010年相比,槽宽增加约65m,现槽宽为180m。
根据以上分析,大胜关水下抛石护岸双频识别声纳监测区域整体以淤积为主,局部护岸冲刷,在坡脚处冲刷较为剧烈。后期需加强观测,防止冲刷破坏加剧。
6 结 语
长江河段整治工程施工环境复杂多变、施工难度大,长江河段的治理要有科学合理的前期规划、设计,根据工程特点,合理选择护岸的实施形式。施工过程中,要求建设、施工、监理各方严格按照规范进行[8]。抛石施工过程中,必须对水位、水深及水流流速、实施前后的断面等数据进行实时监测,利用双频识别声纳系统监测技术对水下抛石情况进行声波摄像,并作为水下抛石防护应用效果分析的基础资料,通过不断地分析、总结,对施工方案及时做出有针对性的调整。
猜你喜欢
水运工程(2020年10期)2020-11-11
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
电子测试(2018年14期)2018-09-26
中国港湾建设(2017年11期)2017-12-19
幸福·悦读(2016年11期)2016-12-21
中国卫生(2016年6期)2016-11-23
火控雷达技术(2016年2期)2016-02-06
交通科学与工程(2014年1期)2014-02-27
船海工程(2013年6期)2013-03-11