果园除草机器人研究现状与展望
2023-11-16 10:50陈中武李沐桐
现代农业装备 2023年5期
高 勇,陈中武,李沐桐,何 林
(1.广东省现代农业装备研究所,广东 广州 510630;2.农业农村部华南现代农业智能装备重点实验室,广东 广州 510630)
0 引言
果园种植作为农业体系的重要组成部分,凭借较高的经济效益、环境净化、园林美化等优势,已经成为全球公认的高价值农产品品类之一。规范化的果园种植产业一般包括地块耕整、育苗栽种、水肥灌溉、除草修枝、病虫害防治、采收运输、加工销售等关键环节[1]。其中,尤以灌溉、除草、防虫等中耕管理环节的周期最长,也最为耗时费力。特别是在适宜果树生长的特定季节和气候环境下,杂草生长速度显著加快、繁殖势头更为旺盛,与果树之间形成明显的竞争关系,直接影响着果树的生长质量与果实产量。据统计,在全球已发现的三千多种杂草中,超过六成对农业生产和作物收成产生巨大影响与危害[2-3]。因此,及时清除或控制杂草的肆意生长,保障果树的土壤养分、水源和阳光等资源,避免果园病虫草害的发生,是保证果园产量、果实品质、果农收入的重中之重。
溯古通今,除草一直是劳动密集型环节,常见的除草方式主要有人工除草、化学除草、生物除草、机械除草。人工除草是最传统的作业方式,虽然灵活方便且效果较好,但是工作强度大、劳动效率低,且随着农村劳动力逐渐减少,以人工为主的除草方式越来越不能适应作业需求。化学除草主要指将化学药剂喷涂在苗草的茎叶上,达到抑制或杀灭杂草的目的;其优点是见效快、人力负担小,但是缺点也很明显:容易四处撒溅而误伤作物,且与当前越来越重视的食品安全等主流社会意识相悖。生物除草是一种较为先进的方式,利用微生物、昆虫、植物、小型哺乳动物等与杂草的天然竞争关系来建立多样化的生态系统,从而限制或减少杂草的生长和繁殖;这种环境友好型方式有助于维持生态平衡,但是技术尚不成熟、且适用的作物类型有限。机械除草则是借助锄头、耙子、割草机等机械工具清除农田杂草,突出优点是简单便捷、减少人工依赖,但是在大面积片区作业的大型机械维护困难、易导致土壤压实板结。为了提高除草效率、解决劳动力不足等问题,乘着人工智能等先进技术快速发展的东风,自动化和智能化的除草机器人应运而生[4-6]。
除草机器人是一类具有自主导航、杂草识别、自动除草等能力的自主操作机器人系统,可帮助维护农田、果园、设施大棚、园艺场地等园区的植物健康。它不仅可以代替或辅助人工进行全天候工作,从而有效解决劳动力不足问题并降低人力成本;而且可以减少对化学农药的依赖,从而保障食品安全并维护生态系统可持续发展;还可以搭载不同工具,同时开展农情监测、作物估产等多项农事工作,还能适应多样化非结构地形和气候条件,从而显著提高杂草管理效率[7-8]。此外,随着各个国家积极出台相关政策文件大力推动农业装备和农业工作的数字化、信息化、智能化变革,以期在智慧农业领域占据主导地位,智能除草机器人也越来越受到国内外专家和学者的青睐[9-13]。与常见的大田除草机器人相比,果园除草机器人是农业机器人中的生力军,虽然它面临的作业环境比平整大田更为崎岖复杂,但是学者们凭借各种奇妙构思与优化设计,使其理论研发与落地应用也在如火如荼地展开。
果园除草机器人是机器人学、机械工程、人工智能、控制科学、计算机科学、农业工程等多学科交叉的产物,其共性关键技术包括作业机具开发、本体设计、环境感知、作物识别、决策控制等,分别对应着智能机器人的“手脚眼脑”等关键部位。但是,相关技术的研究与应用尚不成熟,而且市场上尚未出现量产的果园除草机器人,这严重制约了果园管理环节的高质量发展。为了厘清果园除草环节的智能化进程,本文围绕国内外研发的无需人工驾驶或手扶的果园除草机器人装备,梳理其环境感知与作物识别、移动本体设计与控制、除草机构与机制研发等关键技术领域的研究与应用现状,总结现有研究成果的不足,展望未来发展趋势,以期为研发出更加实用、更加自主、更加智能的果园除草机器人提供参考思路和技术借鉴。
1 国内外研究现状
1.1 智能感知与识别技术
果园除草机器人的智能感知与识别技术是机器人获取环境信息的“眼”,主要包括对作业环境的地图构建和导航、对果树和杂草的智能识别。感知与识别能力的强弱直接影响了机器人行驶路径精度、杂草清除效率、果树保护与果园避障效果。
果园除草机器人通常使用全球定位系统(GPS)、激光雷达、摄像头和惯性导航等传感器技术,使机器人能够精确导航并避开障碍物。韩国大邱庆北科学技术院[14]基于视觉处理技术采用朴素贝叶斯分类方法检测苹果园树干与地面之间的边界,并提出了一种确定自由空间中心线的算法,为果园除草机器人的自主作业提供运动路径和导航信息。华南农业大学李君教授团队[15]利用GPS 获取机器人在果园中的全局绝对位置信息,配备16 线激光雷达感知周边环境,并融合由惯性测量单元(IMU)获取的高频机身姿态信息实现导航定位,进而提出改进人工势场法,实现了四轮差动机器人的局部路径规划。重庆理工大学的蒋睿[16]在一款电动履带底盘上搭载双目相机获取果园环境图片,基于卷积神经网络的YOLOv4 算法构建果树树干的识别模型,而后采用SGBM 算法匹配构建果树坐标地图并采用最小二乘法拟合生成导航中心线,如图1 所示。南京农业大学学者[17]提出基于机器视觉和K-均值聚类技术的中轴提取导航方法,基于该导航方法的履带式移动底盘在果园环境中测试的最大跟踪偏差为14.6 mm。

图1 果树识别与导航中心线拟合效果图[16]
在智能识别方面,通过广泛应用计算机视觉和深度学习技术,使机器人能够识别并区分果树与杂草,从而有针对性地开展除草工作。葡萄牙贝拉内陆大学学者[18]对深度卷积神经网络(DCNN)在作物和杂草检测识别方面的应用效果进行了深入分析(如图2 所示),并将改进的感知识别算法集成于嵌入式边缘设备Jetson Nano 中,而后在一款轮式除草机器人上对识别算法进行了验证。黑龙江佳木斯大学的史婷婷等[19]利用二维激光雷达测量果树的外形轮廓,再利用云台搭配双目摄像头来全方位识别杂草的几何信息。西南大学吕沐华等[20]综合应用2G-R-B 模型、OTSU 阈值分割与二值形态学滤波技术搭建了一套适用于果园环境的机器视觉系统,提高了果园喷药除草机器人视觉系统的图像分割可靠性及识别精度。河北科技大学的李春明等[21]提出基于快速区域卷积神经网络(Fast R-CNN)与生成对抗网络(GAN)的杂草识别算法,识别准确率超过95%,可用于园林杂草的实时检测清理环节。
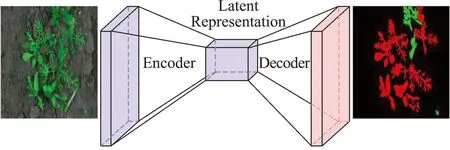
图2 基于DCNN 的苗草语义分割示意图[18]
综上所述,智能感知与识别技术是果园除草机器人实现自动作业的关键,学者们针对具体作业环境探索了个性化的感知与识别方式,其主要优缺点如表1 所示,为了弥补现有方法的不足,未来将朝着更加多元、融合的趋势发展。
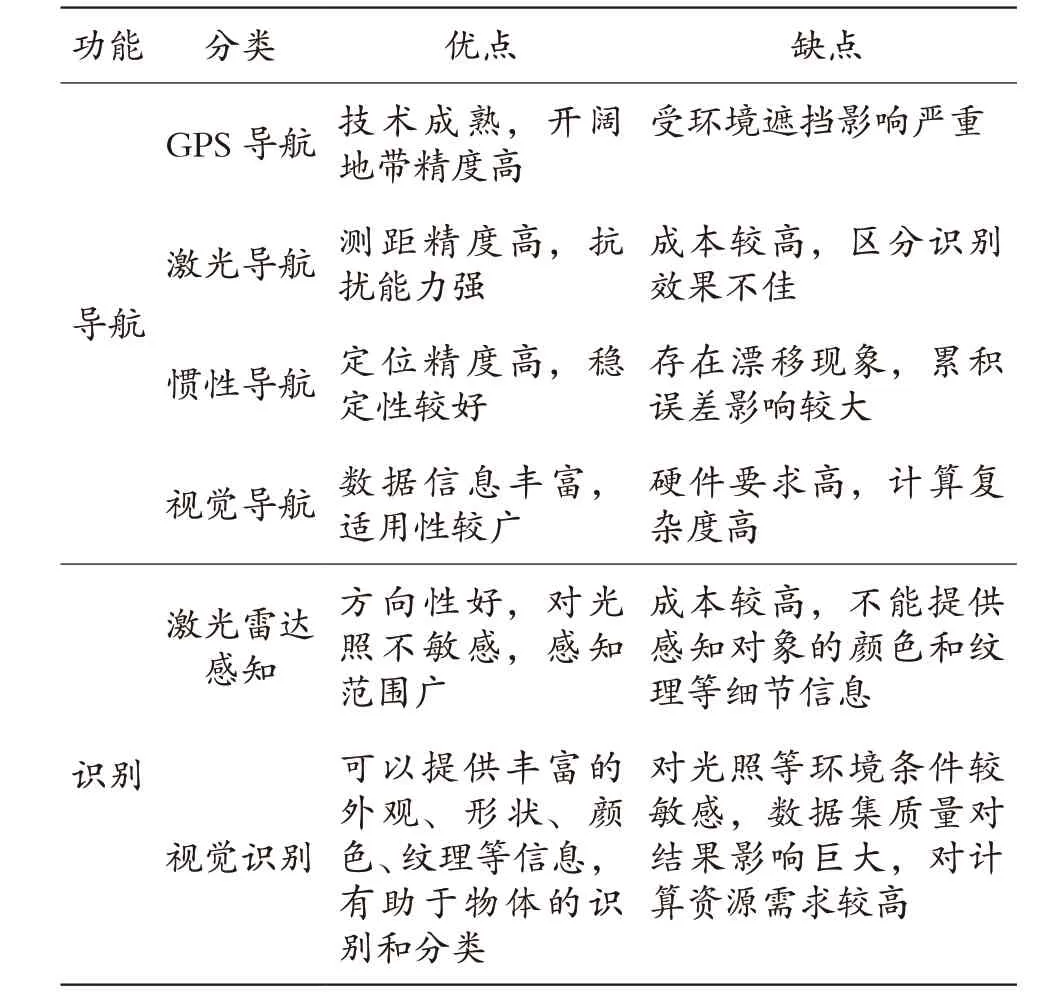
表1 智能感知与识别技术分类及优缺点
1.2 移动本体设计与控制
果园除草机器人的移动本体相当于机器人的“脚”,主要功能是让机器人在多样化的地形环境中平稳越障并自由行驶。一般来说,移动本体还应具有较好的负载能力,不仅要容纳集成控制系统这一“大脑”,还要为动力系统、视觉系统、作业执行系统等提供充足的空间,它们共同构成了果园除草机器人的主躯干。
迄今为止,国内外学者已经开发了多种多样的移动本体底盘。日本东京农业技术大学的研究人员[22]研发了一款轮式除草机器人RLM,如图3 所示,可清理平均高度为44±15 mm 的杂草,该机器人能够有效应对梨园除草过程中的落果和撞树等挑战。德国霍恩海姆大学[23]研制的葡萄园行间除草机器人采用履带式移动底盘,如图4 所示,通过2 台无刷电机驱动行驶时可负载500 kg,整机由搭载i5 处理器的嵌入式计算机编程控制,并配备2D 激光扫描仪、声呐传感器和IMU 跟随树木和藤蔓行。泰国学者[24]设计的遥控履带式割草机器人,安装有网络摄像头,可通过视觉系统反馈控制2 个直流减速电机的转速,从而改变机器人的运动轨迹。印度贾瓦哈拉尔·尼赫鲁大学[25]研制的仿蜘蛛型腿足式机器人由太阳能电池板提供动力,如图5 所示,采用Arduino 和超声波探测器控制机器人躲避障碍物,可以同时进行割草和喷施液态肥工作。日本筑波大学的NISHIMURA 等[26]开发了一款如图6 所示的螺旋桨 -轮式复合除草机器人,可在最大60°的丘陵山区斜坡上稳定运动并执行割草任务,其运动速度为0.16 m/s,采用锂电池供电,每次可连续工作23 min 并覆盖66 m2的区域。
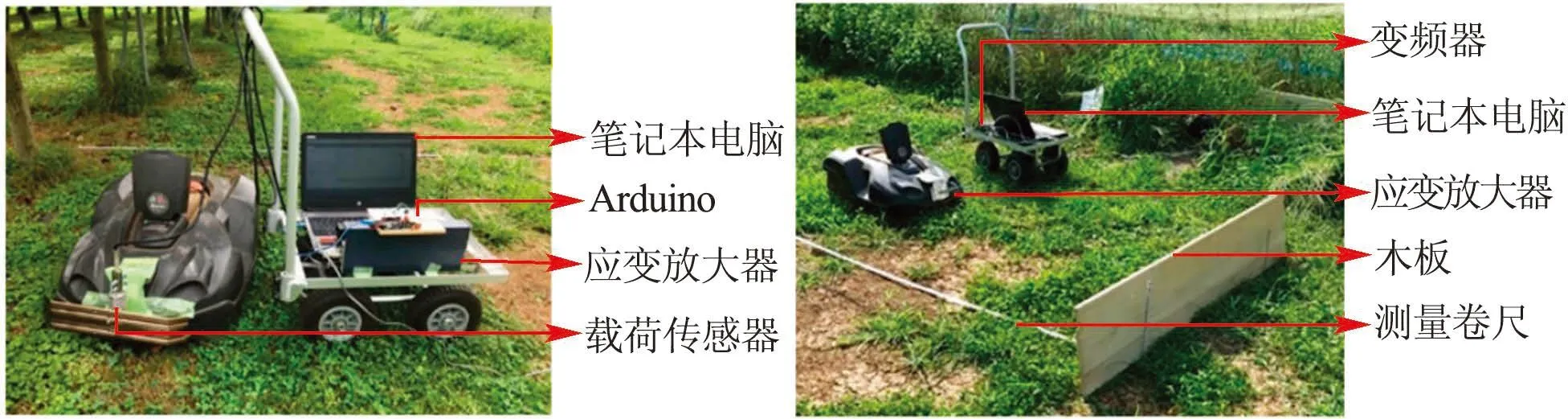
图3 梨园除草机器人RLM[22]

图4 葡萄园行间除草机器人[23]

图5 仿蜘蛛型腿足式割草机器人[25]

图6 螺旋桨-轮式复合除草机器人[26]
由广东省现代农业装备研究所与中国农业机械化科学研究院集团有限公司联合研发的丘陵果园除草机器人(如图7 所示),采用电液一体化驱控系统,通过CAN 总线通信方式遥控仿形履带底盘实现直行和转向运动,该机器人的行驶速度为6.2 km/h,可攀爬25°斜坡路面,并在柑橘园完成了除草测试应用工作[27-28]。华中农业大学的龚政[29]以现场可编程门阵列(FPGA)为控制核心,将电驱系统、视觉系统、多传感器导航系统等集成在一块硬件芯片上,搭建了一款轻型履带式行走底盘,可在果园垄间实现除草和避障功能。兰州理工大学刘永平等[30-31]针对果园矮砧密植栽培模式,研制了一台割刀前置悬挂的轮式除草机器人,其行走和割草动力均由电池组提供,采用Arduino 作为主控制器并集成无线通信和超声波测距模块实现避障功能。安徽工业大学与汕头大学[32]联合研发的除草机器人(如图8 所示),则以电驱四足为本体平台,凭借腿足离散支撑行走的优势,可以在非结构环境中进行作业。佳木斯大学[19]设计的全地形智能高杆果园除草机器人(如图9 所示),采用伸缩可切换式复合轮履结构,由STM32 单片机根据压敏电阻值切换轮履模式,从而更好地适应复杂多变的路况。

图7 丘陵果园除草机器人[27]

图8 四足激光除草机器人[32]
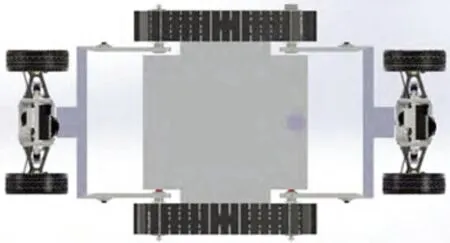
图9 伸缩可切换轮履式果园除草机器人[19]
综上所述,现有的移动本体平台主要包括轮式、履带式、腿足式与复合式,它们的优缺点汇总于表2中。可以预见,为了更好适应多样化的作业地形,集多种底盘优势于一体的复合移动本体将受到更多重视。
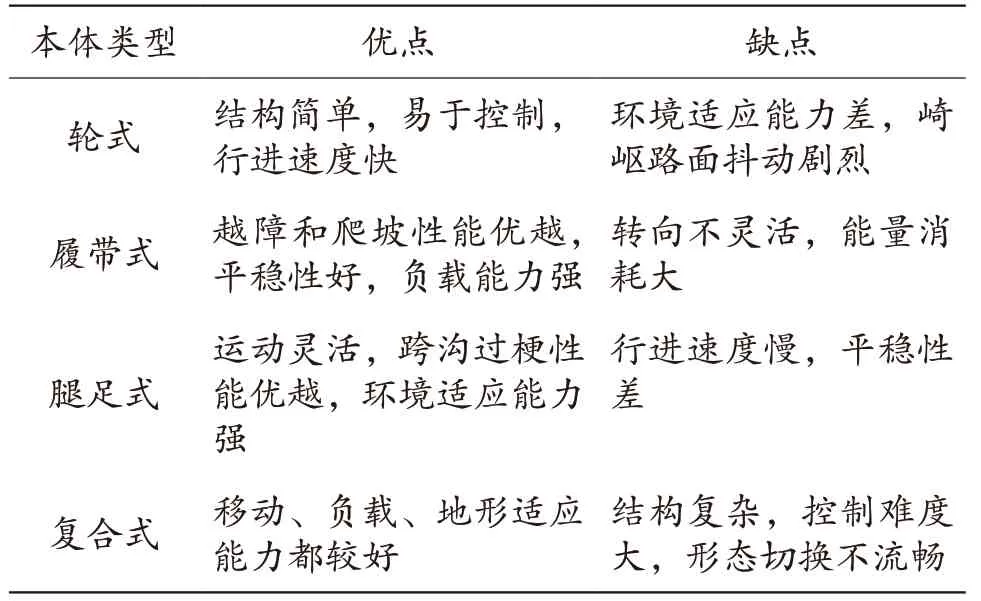
表2 移动本体类型及其优缺点
1.3 除草机构与机制研发
果园除草机器人的除草机构与机制可以看作是机器人的“手”,主要负责在感知识别系统的引导下精准地管理杂草。通常来说,除草机构与除草机制方法应根据果园环境条件和移动本体架构进行配套开发,以便在确保果树不被破坏的前提下实现作物行间和株间的精细化除草。
NISHIMURA 等[26]从安全和轻量化角度考虑,使用尼龙绳进行割草作业,如图10 所示。葡萄牙学者[18]将喷嘴安装于笛卡尔机械手末端,通过视觉伺服的方式进行精确除草作业。美国伊利诺伊大学的JEON 等[33]开发了一种直接施用化学品的末端执行器(如图11 所示),即通过5 自由度机械臂控制末端执行器精确地将化学药剂擦拭于杂草茎秆的切割面上,等待大约6—10 天后杂草在化学物质作用下死亡,这种通过微量除草剂控制杂草生长的方案可以防止环境污染。REISER 等[23]制造了一种电动分蘖头旋转除草机具,由直流电机驱动,通过皮带传动带动齿轮箱和传动轴,可用于葡萄园等果园环境中的行间除草。

图10 尼龙绳割草机构[26]

图11 直接施用化学药剂除草的末端执行器[33]
张良安等[32]采用激光除草方式进行作业。吕沐华等[20]设计的果园喷药除草机器人,在4 自由度机械臂末端安装高压雾化陶瓷喷嘴,以实现对指定杂草目标的高精度喷药作业。刘永平教授团队[30,34]通过对土壤材料模型和不同割刀结构进行有限元仿真分析,设计了平面圆弧割刀为最优除草工具,相应的切削阻力和功率消耗都较小,同时设计了丝杠滑台和悬架弹簧来升降割刀台以保证作业的平稳性。史婷婷等[19]针对高杆果园环境,设计了梳齿状行间除草耕耘锄以及由钢丝软轴传动的株间除草弹齿盘,如图12、图13 所示,通过自由调节刀具高度采用机械翻埋的方式达到行间和株间除草的目的。

图12 行间除草耕耘锄[19]
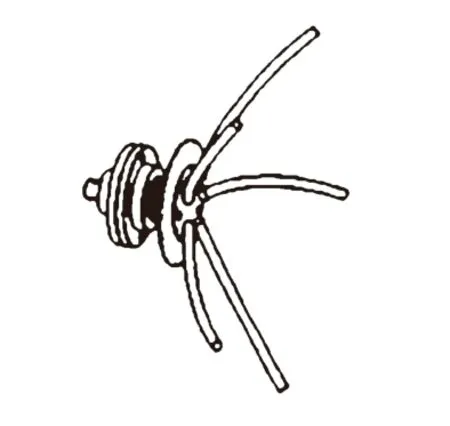
图13 株间除草弹齿盘[19]
综上所述,常见的果园除草机构与作业机制有尼龙绳割草、激光除草、对靶喷药除草、机械机具除草等,其优缺点对比汇总于表3 中。为了在果园中达到快速精细的片区除草效果,研制同时具备行间和株间除草能力的通用机械装备将是大势所趋。
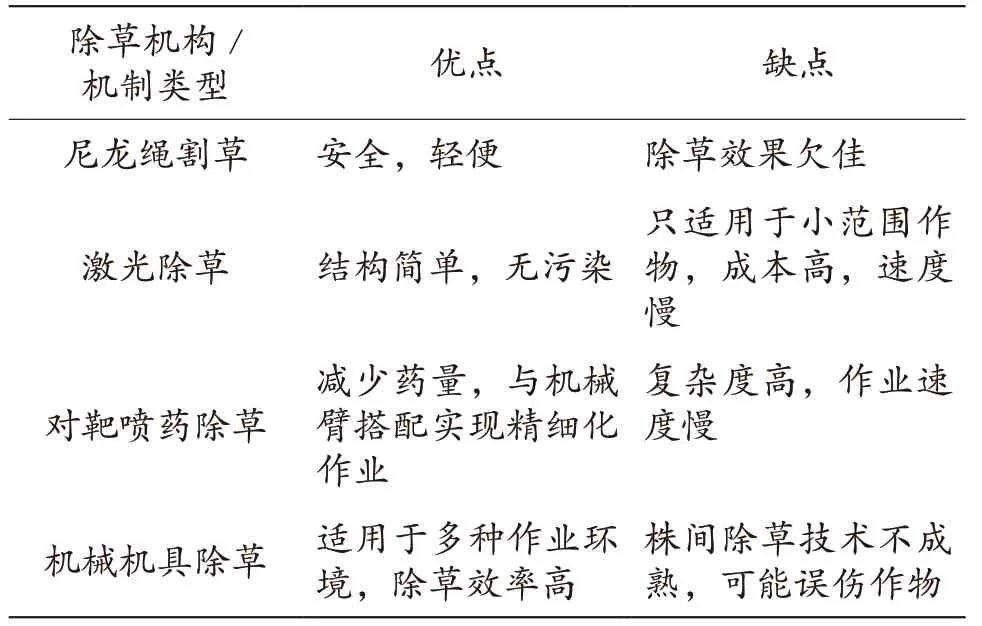
表3 除草机构与机制类型及其优缺点
2 存在问题与发展趋势
2.1 问题与不足
果园除草机器人是智能农机装备的重要组成部分,其研发与应用在智慧果园建设和管理中发挥着举足轻重的作用。虽然国内外学者针对特定果园环境开发了各具特色的除草机器人样机,但是大多还处于实验室验证阶段,且现有机器人本身也存在一些共性问题,主要包括以下几个方面。
1)续航能力不足。除草机器人大多以纯电驱或纯液压提供动力,但是电池充电效率和使用寿命有限,而且液油压容量有限,难以维持大片区、高负荷、长时间的除草作业,需频繁更换动力源,严重限制了机器人全天候作业能力的发挥。
2)自主导航能力不达标。现有除草机器人多依赖较为成熟的GPS 技术进行定位导航,但其易受果树遮挡的影响,且在温室大棚内的应用效果不佳。基于视觉、激光雷达、惯性测量的导航技术虽然在局地定位导航的效果尚可,但是易受噪声干扰而出现较大的累计误差。
3)移动底盘通用性不强。虽然已开发的各种移动底盘在特定果园环境中具有较好的通过性,但是对地形条件有太多假设限制,无法在快速移动性与非结构化地形适应性之间取得平衡。这导致大多数除草机器人都要定制开发,从而带来较高的制造和维护成本。
4)株间除草质量欠佳。株间除草属于精细化作业范畴,尤其依赖于机器人对果树和杂草识别的精准度。在行间除草表现良好的机具不一定适合株间除草,特别是靠近树根和树干的地方,极易误伤果树。而具有株间除草能力的部分机具,其除草效率比较低下,也无法将杂草完全清除干净。
2.2 研究趋势展望
为了提高果园除草机器人的工作性能、作业效率和可持续性,弥补现有机器人装备的不足,未来可在以下几个方面开展更多的创新研究与落地应用。
1)配备清洁绿色混合动力能源。未来的果园除草机器人将趋向使用更环保的能源系统。即使用清洁绿色的混合动力能源,如太阳能、风能或高效能源电池以及多种动力源组合形式,不仅可以减少碳排放、降低对有限能源的依赖,而且可以有效提升机器人的作业续航能力,充分发挥智能机器人的全天候工作优势。
2)优化组合导航和感知识别技术。结合GPS、视觉、激光雷达、惯性测量等导航技术的优势,采用多传感器信息融合技术,使机器人能够根据作业环境和作业任务的动态变换与优先级别自主切换导航和识别功能,从而更加精确地区分果树、杂草、行人与障碍物等,为进一步操控行驶底盘和作业机具提供先验信息保障。
3)研制复合移动本体以及多功能除草机具。复合式移动本体集轮履足平台的优势于一身,既可以在平原、丘陵地带快速行驶,又可以在陡坡山地环境中顺利通过,凭借轻量化、集约化的结构特点,对各种果园布局和地形环境均具有较高的适应性。同时搭载具有行间和株间除草能力的仿形作业机具,可根据地形起伏自适应调节作业姿态,从而提高除草质量和效率,并延长除草机具的使用寿命。
4)完善多机群控与协同作业技术。单机作业能力毕竟有限,不适合在较大片区的规模化园林中独立作业。研究并应用多机群控与协同作业技术,不仅可以同时调度多台机器人以覆盖更加广阔的果园区域,提高除草效率并缩短作业周期,而且可以操控搭载不同工具的机器人同时执行除草、数据采集、果园巡检等多项任务,提升果园监管效益,还可以在多机群控系统之间共享数据和资源,相互监测作业状态和运行故障,以便及时反馈和发现问题,有效降低机器人的维护周期和成本。
3 总结
果园除草机器人是智慧果园和现代农业管理的有力工具,不仅有益于减少化学农药对土壤和环境的污染,而且有助于降低人工依赖和人力成本,极大地提高了果园除草效率,有效地改善了果园管理的质量。通过综述国内外文献及成果,可以看到果园除草机器人的研究已经取得了很大的进展。在环境感知与智能识别方面,各种传感器和智能识别系统的应用使机器人能够更准确地检测果树和杂草,从而避免误伤果树。本体设计与控制方面的创新,提高了机器人的稳定性和机动性,使其能够适应不同果园环境。配套除草装置的研发和应用,则提高了果园管理的效率。虽然已开发的机器人还存在续航不足、导航不达标、通用性不强等方面的共性问题,但是随着研究人员在清洁能源、组合感知、复合本体、协同群控等技术领域的不断探索与创新,未来研发的智能果园除草机器人将为智慧农业领域的革新升级与可持续发展做出更大贡献。
猜你喜欢
今日农业(2022年16期)2022-09-22
今日农业(2022年15期)2022-09-20
科教新报(2022年22期)2022-07-02
趣味(作文与阅读)(2022年3期)2022-06-10
今日农业(2021年21期)2021-11-26
快乐语文(2021年27期)2021-11-24
阅读(低年级)(2019年9期)2019-11-15
小学生作文(低年级适用)(2017年9期)2017-10-13
现代农业(2015年5期)2015-02-28
环球时报(2014-01-08)2014-01-08