基于箕舌线函数的变步长SOQPSK-TG盲均衡算法
2023-11-13 01:37:46张欢欢王方刚贺勃翔赖鹏辉
无线电工程 2023年11期
张欢欢,王方刚*,吴 宸,贺勃翔,赖鹏辉,王 岩
(1.北京交通大学 电子信息工程学院,北京 100044;2.国防科技大学 电子科学学院,湖南 长沙 410073;3.北京宇航系统工程研究所,北京 100076)
0 引言
部分响应成形偏移正交相移键控(Shaped Offset Quadrature Phase Shift Keying used in Telemetry Group,SOQPSK-TG)信号作为IRIG-106标准中专门用于遥测的波形[1],有包络恒定、频谱效率高的优点[2]。当遥测飞行器与地面距离较近,处于“低仰角”状态时,遥测信道属于多径衰落信道,为防止多径衰落引起的遥测传输错误,信道均衡技术被广泛应用在航空遥测通信系统[3]中。
针对SOQPSK-TG信号的均衡问题,文献[4]使用的最小均方均衡器均衡性能较优,但该算法属于数据辅助方法,需要消耗额外的功率、频带资源。文献[5]提出了使用判决反馈均衡器,该算法复杂度低,但对同步要求较高,信道干扰使得接收机难以获取同步参数的准确估计值,因而算法精度难以保证。文献[6]验证了恒模算法(Constant Modulus Algorithm,CMA)可以有效均衡,该算法计算量小、复杂度低,但存在收敛速度慢和稳态误差大的问题。文献[7-8]提出了使用频域均衡技术,收敛效果接近最优,但算法复杂度高,且仍属于数据辅助均衡。
针对上述问题,本文提出一种基于箕舌线函数的变步长盲均衡算法,不需要数据辅助,结构简单、容易实现。该算法通过箕舌线函数控制步长迭代,初始阶段采用大步长加快收敛速度,接近收敛时改用小步长以获得较小的稳态误差,从而改善收敛性能。仿真实验结果表明,针对航空遥测系统中滑行、起飞、远程飞行这3类典型场景,在接收端使用本文提出的算法可以有效改善多径衰落的影响,相较于传统的CMA均衡算法,在误码率为10-5时有0.5~2 dB的性能增益,且收敛速度更快。
1 系统模型
考虑一个航空遥测通信系统,其中发送信号采用SOQPSK-TG信号,由于多径衰落信道以及接收机噪声的影响,接收信号可以表示为:
r(t)=s(t)*h(t)+z(t),
(1)
式中:s(t)为发送信号,h(t)为信道冲击响应,z(t)为加性高斯白噪声。1.1和1.2节将分别针对SOQPSK-TG信号及多径衰落信道进行详细建模。
1.1 信号模型
SOQPSK-TG是一种特殊的连续相位调制方式,其复基带信号表达式为[9]:
(2)
式中:Eb为符号能量,Tb为符号间隔,φ(t;α)为SOQPSK-TG信号的相位函数。当nTb≤t≤(n+1)Tb时,φ(t;α)可以表示为[10]:
(3)
式中:N表示符号间的关联长度,对于SOQPSK-TG信号,N一般取8,α为实际传输的信息序列,q(t)为相位脉冲响应[11]。
(4)
式中:g(t)为频率脉冲函数。
(5)
式中:幅值A用来归一化脉冲波形,使频率脉冲积分为1/2,ρ=0.7,B=1.25。窗函数ω(t)的表达式为:
(6)
式中:T1取1.5,T2取0.5。
1.2 信道模型
假设发送端和接收端之间共有L条传播路径,则信道的冲击响应函数可表示为[12]:
(7)
式中:Γi表示第i条路径的相对增益,τi表示第i条路径的时延,ωτi表示第i条路径产生的随机相位,其中ω表示射频信号频率。考虑发送端与接收端的相对移动产生的多普勒频偏[13],式(1)可改写为:
(8)
式中:fd,i表示第i条路径的多普勒频率偏移量。
2 基于箕舌线函数的变步长盲均衡算法
传统SOQPSK-TG盲均衡算法步长取常数值,步长越大,算法收敛速度越快,但稳态误差越大;而步长越小,稳态误差变小,收敛速度变慢。为解决上述问题,本文创新性地提出了一种基于箕舌线函数的变步长盲均衡算法,其结构如图1所示。

图1 算法结构Fig.1 The algorithm structure
图1中,r(n)为接收的遥测信号,w(n)为均衡器的抽头系数,e(n)为误差信号,y(n)为均衡器的输出信号。变步长盲均衡算法的代价函数J表示为[14]:

(9)
式中:发送信号为恒模信号,故R2=1。输出信号y(n)的表达式为:
(10)
本文采用随机梯度下降法更新抽头系数,则其迭代过程表示为:
wn+1(m)=wn(m)-μ(n)e(n)r*(n-m),
(11)
式中:μ(n)表示迭代步长,r*(n)表示接收信号r(n)的共轭,e(n)为误差信号。
(12)
步长μ(n)通过箕舌函数控制,其表达式为[15]:
(13)
式中:b为待定系数,用于控制箕舌线波形;a为幅值调整系数,用于控制步长取值范围。通过调整参数a、b可以得到合适的步长变化曲线。实际中,常通过对误差函数加窗取平均值替代e2(n),消除单点误差函数波动导致的算法误调,提升算法鲁棒性。
为保证算法正常收敛,对于步长μ(n)设定如下限制:
(14)
根据式(13)~式(14),步长μ(n)满足:
0≤μ(n)≤a。
(15)
在有信道干扰的情况下,步长变化始终保持在[0,a],可以避免由于突发情况时误差函数过大而造成误调或发散,从而保证算法的跟踪性能。
基于箕舌线函数的变步长盲均衡算法流程框图如图2所示,具体步骤如下:
① 初始化算法参数。均衡器长度取121,初始化迭代步长值一般较大,因此取初始迭代步长μ(1)=0.001,初始化均衡器抽头系数w(13,1)=0.9,其他抽头值置零,步长迭代公式中参数a取[0.000 2, 0.000 6],b取[3,30]。
② 计算误差函数。根据式(10)得到第k次迭代信号y(k),根据式(12)计算误差函数e(k)。
③ 更新均衡器步长。根据式(13)计算均衡器步长参数μ(k)。
④ 更新均衡器抽头系数。根据式(11)计算第k次迭代抽头系数w(k+1)。
⑤ 若算法收敛或者迭代次数达到上限K,则算法停止迭代,输出最终的均衡器抽头系数;否则,重新回到步骤②,继续迭代。
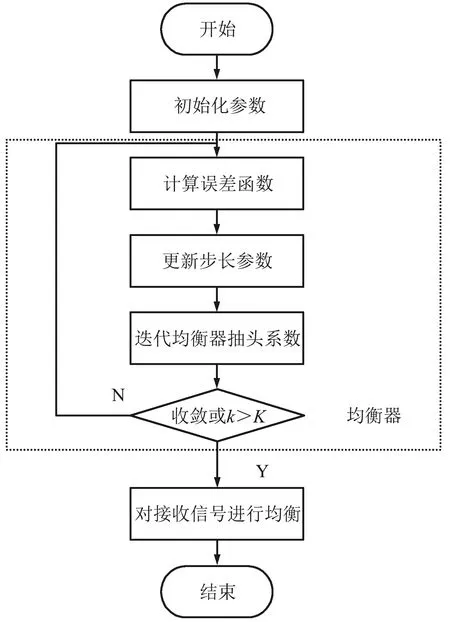
图2 算法流程Fig.2 Algorithm flow diagram
3 接收机模型及仿真结果
3.1 接收机模型
SOQPSK-TG信号传输系统中接收机结构框图如图3所示,接收信号首先进入均衡器,之后经过同步和检测模块[6],同步、检测的具体实施过程参考文献[16]。
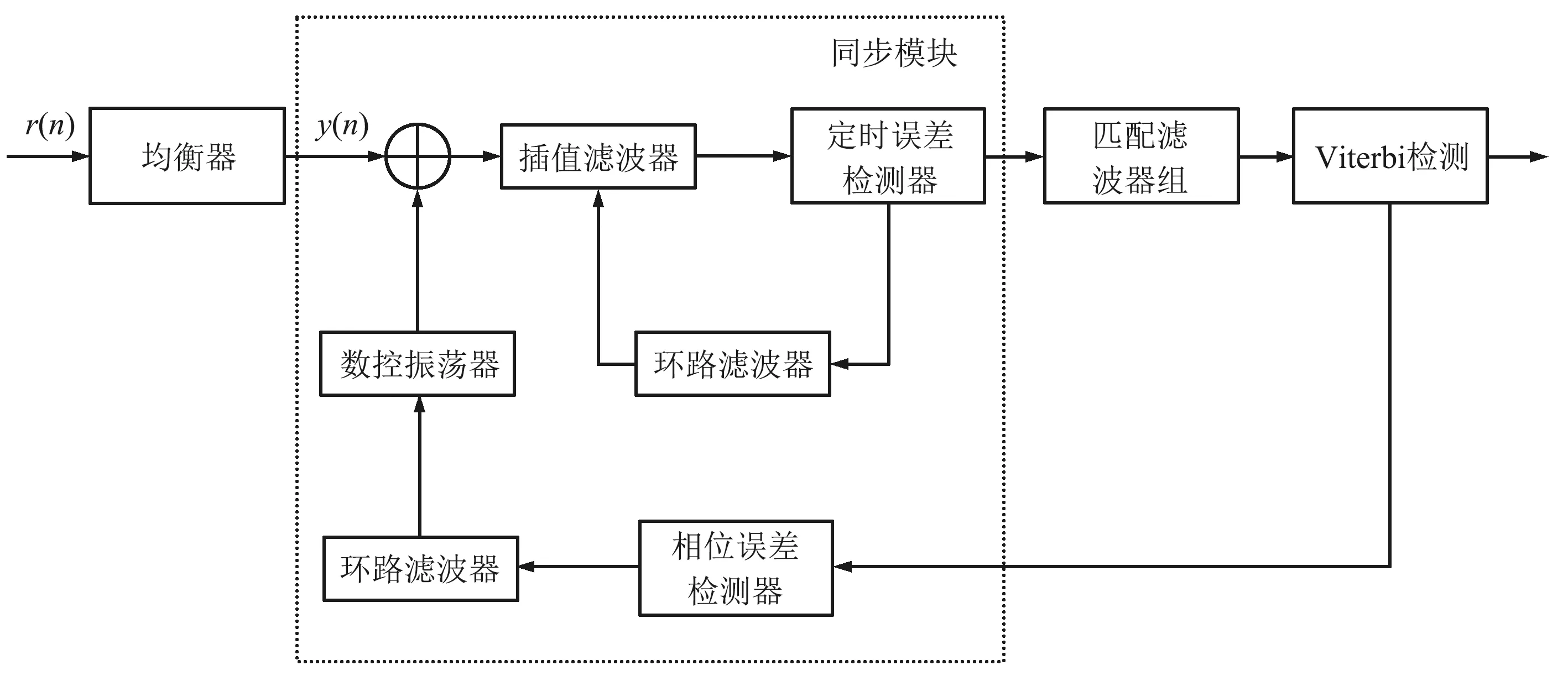
图3 接收系统结构Fig.3 Structure of receiving system
3.2 仿真结果分析
文献[17-19]在Edwards AFB进行了信道探测实验,根据测试结果提出航空遥测的多径信道模型,模型包含一条直射路径及多条反射路径。在此基础之上,Zhou等[3]提出了滑行、起飞和远航场景下的多径信道,本节将发送信号通过3种不同信道,接收信号分别通过CMA均衡器与变步长盲均衡器,之后进行同步、译码,分析算法均衡性能。
3.2.1 滑行场景
在滑行场景中,飞行器与地面接收端在同一高度,地面障碍物较多,信道存在多条反射路径。滑行场景信道参数如表1所示。
表1 滑行场景信道参数Tab.1 Taxiing scenario channel parameters
图4显示了滑行场景中,Eb/N0=30 dB时,接收信号分别经过传统均衡及所提算法后的误差收敛曲线。可以看到,传统均衡在迭代15 000次左右收敛;而所提算法在5 000次左右即可收敛,在提高运行效率的同时,有更小的剩余误差。
图5显示了2种算法的误码率曲线,可以看出,相较于传统均衡,使用所提算法误码率性能提升约0.5 dB(BER=10-5)。
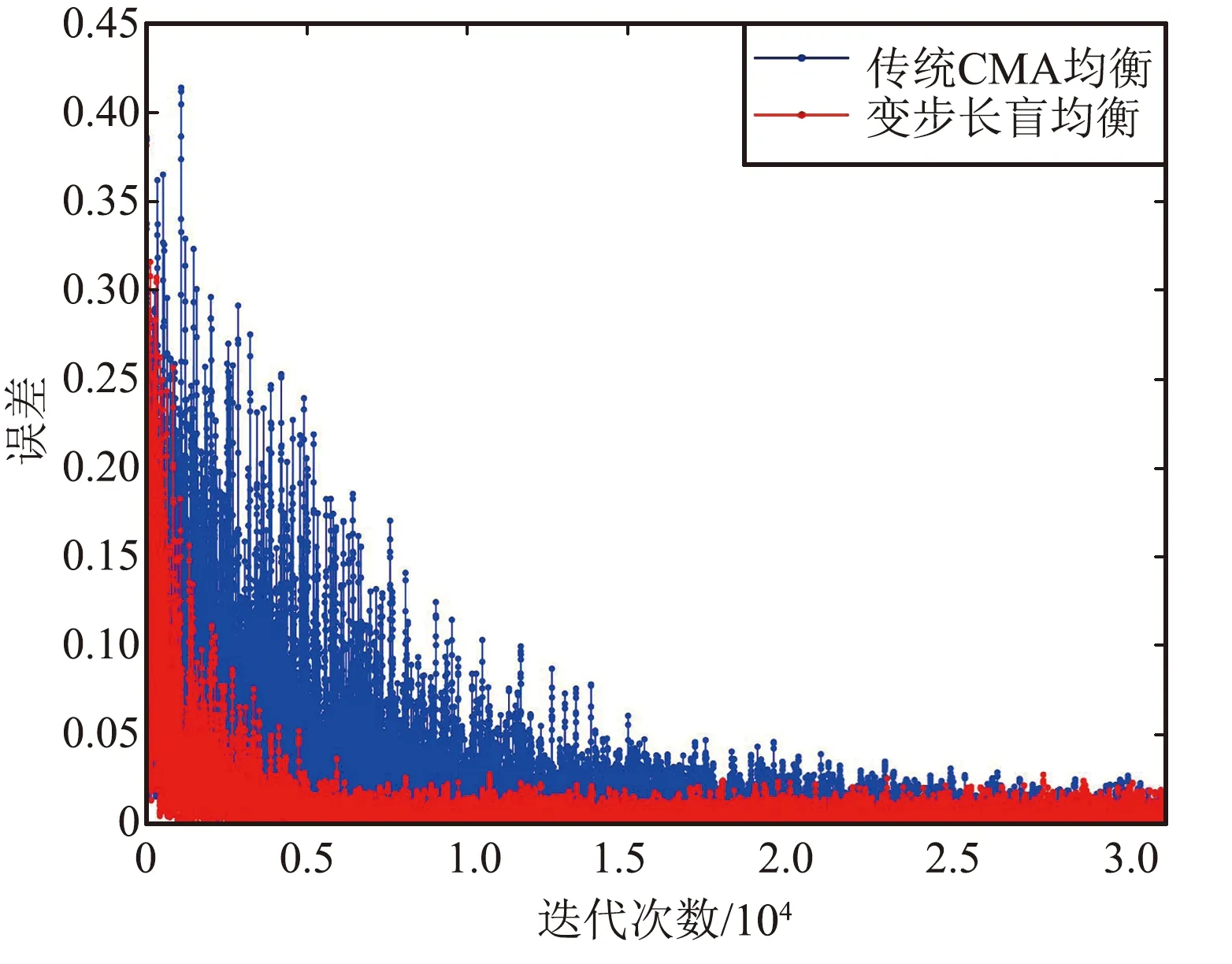
图4 滑行场景误差收敛曲线Fig.4 Error convergence curve in taxiing scenario

图5 滑行场景误码率曲线Fig.5 BER curve in taxiing scenario
3.2.2 起飞场景
在起飞场景中,飞行器逐渐远离地面,相较于滑行信道,传输路径相对功率变小、时延变大。起飞场景信道参数如表2所示。
表2 起飞场景信道参数Tab.2 Take-off scenario channel parameters
起飞场景中2种均衡方案的误差收敛曲线如图6所示,可以看出,传统方案在5 000次后开始收敛,而变步长盲均衡方案在2 500次左右收敛,可以更快达到稳态。

图6 起飞场景误差收敛曲线Fig.6 Error convergence curve in take-off scenario
传统均衡算法及所提算法的误码率对比曲线如图7所示,可以看到,在Eb/N0=12 dB时,变步长算法在误码率上领先1个数量级。在BER=10-5时,变步长算法能提升约1 dB的性能增益。
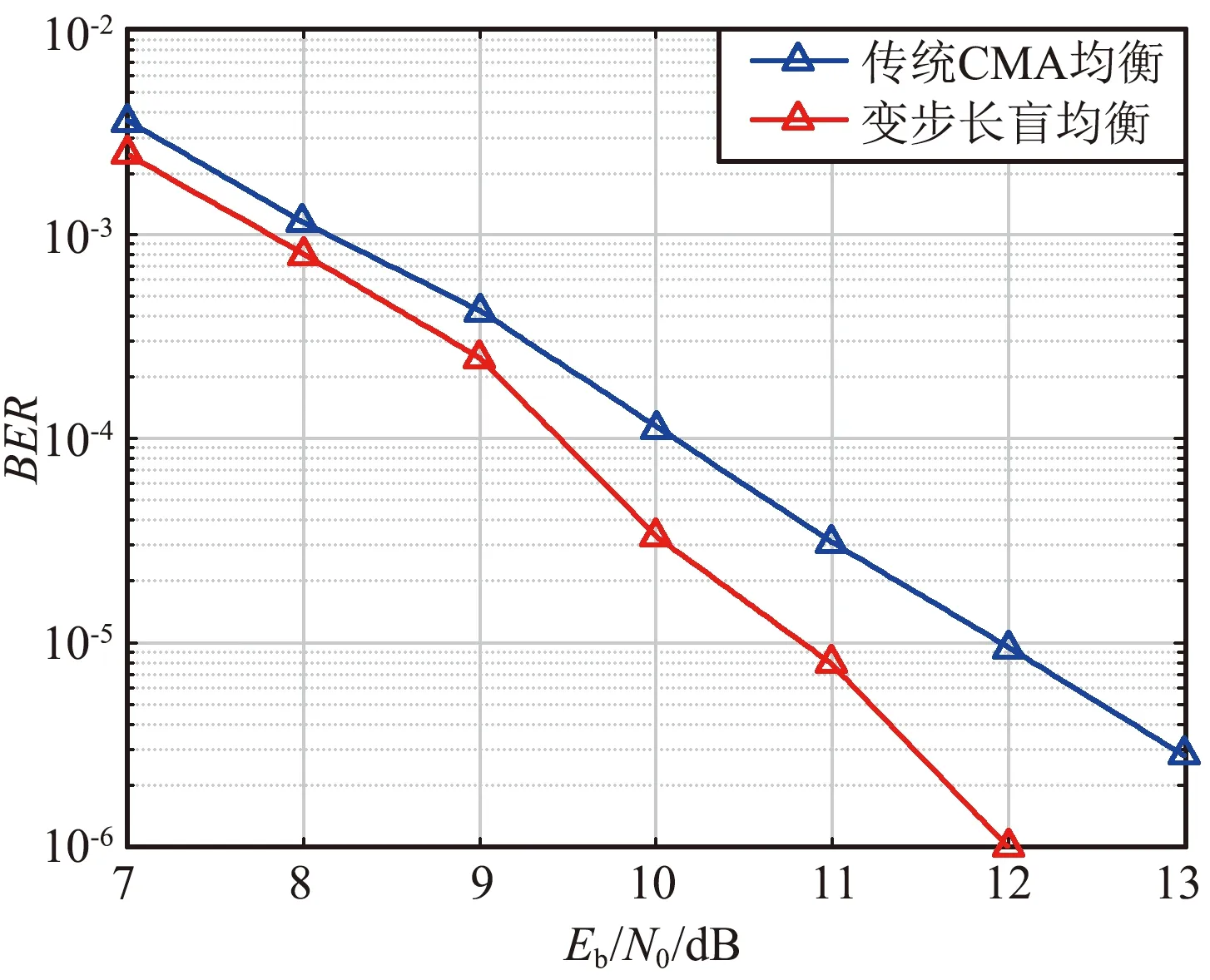
图7 起飞场景误码率曲线Fig.7 BER curve in take-off scenario
3.2.3 远程飞行场景
在远程飞行场景,地面接收端和发射端之间距离较远,考虑采用两径信道模型。信道包含一条直射径及一条反射径,反射径有较高相对功率及较大时延。由于发射器和接收器之间的距离在很大范围内变化,并且考虑航空通信中不同地形的信道特征不同,反射径的功率具有很大变化范围。为更好评估两径模型,信道参数取2组值,如表3所示。

表3 远程飞行场景信道参数Tab.3 Far-flight scenario channel parameters
相较于滑行、起飞场景,远程飞行场景的多径信道恶化更为严重。远程飞行场景1中,信道反射径相对功率衰减为-2 dB。通过图8展示的2种均衡算法误差收敛曲线可以看出,相较于传统均衡算法,变步长盲均衡算法可以更快收敛,且剩余误差更小。
图9展示了在远程飞行场景1中,传统均衡与变步长算法仿真误码率对比。在Eb/N0=20 dB时,变步长算法的误码率可以下降到10-5,并且领先CMA算法一个数量级。

图8 远程飞行场景1误差收敛曲线Fig.8 Error convergence curve in far-fight scenario 1

图9 远程飞行场景1误码率曲线Fig.9 BER curve in far-fight scenario 1
场景2中反射径相对功率衰减为-8 dB。相较于场景1,反射径对主径影响减小,误差收敛曲线与误码率表现向好。从图10可以看出,变步长盲均衡算法在迭代5 000次以内可以达到收敛状态,稳态误差小而稳定。而传统均衡算法需要迭代至少 15 000次才达到收敛状态。图11显示变步长盲均衡算法在误码率达到10-5时,比传统算法领先约 0.7 dB性能增益。

图10 远程飞行场景2误差收敛曲线Fig.10 Error convergence curve in far-fight scenario 2
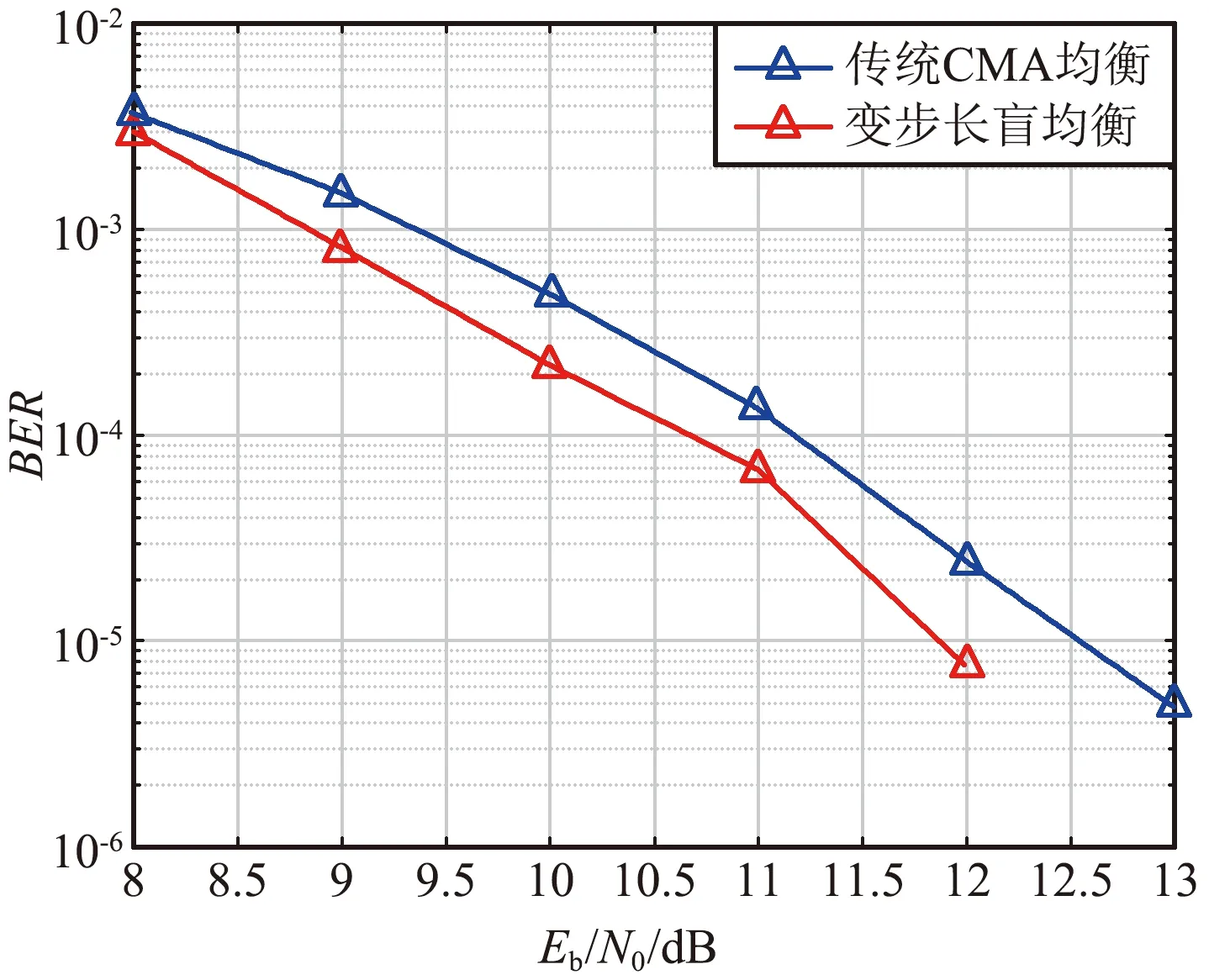
图11 远程飞行场景2误码率曲线Fig.11 BER curve in far-fight scenario 2
4 结束语
在航空遥测通信系统中,针对传统SOQPSK-TG信号盲均衡算法收敛速度慢、稳态误差大的问题,提出基于箕舌线函数的变步长盲均衡算法。仿真实验结果表明,该算法在保持低复杂度的情况下,能有效提升收敛速度、减小稳态误差。相较于传统均衡算法,在滑行场景中,所提方案误码性能可以提升约0.5 dB;在起飞场景,所提方案能提升约1 dB的均衡性能增益;在远程飞行过程中,受地形变化影响,信道参数取2组不同值,场景1中反射径相对功率衰减较小,所提方案比传统CMA算法领先2 dB左右的误码性能增益;场景2中反射径相对功率衰减较大,所提算法可以带来约0.7 dB的性能增益;另外,在上述3种典型场景下,所提算法均能更快收敛,且在所提算法趋于稳态时,其剩余误差更小。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31 05:18:20
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
电子器件(2015年5期)2015-12-29 08:42:39
电源技术(2015年1期)2015-08-22 11:16:14
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电测与仪表(2014年2期)2014-04-04 09:04:00
单片机与嵌入式系统应用(2014年7期)2014-03-24 19:12:05
铁路通信信号工程技术(2014年3期)2014-02-28 16:56:24
长春师范大学学报(2013年10期)2013-10-23 08:44:42
电力自动化设备(2013年11期)2013-09-18 02:55:16