毫米波雷达点云的密度和划分联合聚类方法
2023-11-08 01:54:50彭耀霖李荣冰何梓君
测控技术 2023年10期
彭耀霖,李荣冰*,何梓君
(1.南京航空航天大学 自动化学院 导航研究中心,江苏 南京 211106; 2.空军驻南京地区第四军事代表室,江苏 南京 210000)
毫米波雷达被广泛应用于智能家居、智慧养老和患者监护等领域[1-2],当雷达系统检测到目标的多个点迹时,首先考虑的是聚类问题。目前,聚类算法根据原理主要分为5类,包括划分、层次、密度、网格和模型。毫米波雷达获取的是目标径向信息,点云数据沿径向发散,存在角分辨率低、输出稀疏、分布不均匀等缺点,同时还存在噪声杂波和虚假目标影响。为方便处理量测信息,需要对雷达点云数据进行精确划分聚类和去除杂波噪声,特别是在人多密集的情况下,点云分布没有一个明显的分界线,存在多目标点云数据密集分布的现象,点云聚类划分难度更大。目前在针对人员检测的毫米波雷达应用中,没有较好的点云聚类方法,因此,很有必要采取适当的策略来提高毫米波雷达点云聚类算法性能。
针对毫米波雷达数据的特性,国内外学者提出许多相关的聚类算法。Smith等[8]引入加权密度函数,提出一种椭圆聚类算法,使点云簇以椭圆结构进行扩展,取得了与标准聚类算法相当的性能。Scheiner等[9]对雷达数据进行了二次聚类,第1次聚类使用自适应调整核心点数阈值的DBSCAN(Density-Based Spatial Clustering of Applications with Noise)算法,第2次聚类仍使用DBSCAN算法,但参数不同,取得了较好的数据聚类效果。该算法仅自适应调节核心点数阈值参数,未能较好地优化雷达均匀性问题。蒋留兵等[10]利用卡尔曼滤波算法对DBSCAN算法进行改进,实现聚类算法参数自适应和增量聚类,但改进算法存在误差时域传递问题。
现有这些研究大都是对雷达二维数据进行聚类[11-13],具有局限性,同时现有的基于密度原理改进的聚类算法没有考虑密度扩张的影响[14-15]。因此,针对室内人员检测环境的毫米波雷达点云数据特性,并考虑多目标点云密集的复杂情况,本文提出一种毫米波雷达点云的密度和划分联合聚类方法。针对毫米波雷达点云数据特性,该方法首先采用基于DBSCAN改进的参数自适应聚类算法,根据K个近邻点判断目标点处密度分布来自适应调整聚类参数;然后针对密度聚类对密度相似的空间点间会出现无限制地几何扩张问题,对异常数据簇使用K均值聚类算法进行二次聚类。改进的点云聚类方法更加适应毫米波雷达点云数据的特性,聚类效果更加细腻和准确。
1 雷达点云聚类方法设计
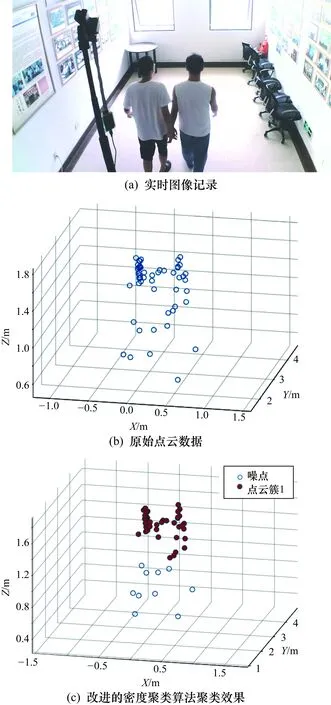
针对人员目标检测需求,对毫米波雷达数据输出的点云特征进行分析,并根据数据特征设计雷达点云聚类算法。实时视频画面记录如图1(a)所示,该场景为相邻2人以0.35~0.75 m/s速度靠近雷达行进;雷达传感器在片上经过恒虚警检测等信号链处理后,通过串口通信在上位机接收到的点云数据如图1(b)所示。

图1 毫米波雷达人员目标点云数据示例
从图1中可以看出,室内人员目标的雷达点云特征有:① 雷达点云输出稀疏,且存在噪声;② 点云分布沿径向发散,均匀性差;③ 雷达对扩展目标的检测包含许多局部轮廓信息;④ 多目标密集情况下,点云无明显的分界线。
常用的单一经典算法都不太适用于毫米波雷达数据特性[7],针对毫米波雷达点云数据特性和室内人员检测应用场景,本文设计一种毫米波雷达点云密度和划分联合聚类方法,框架如图2所示。
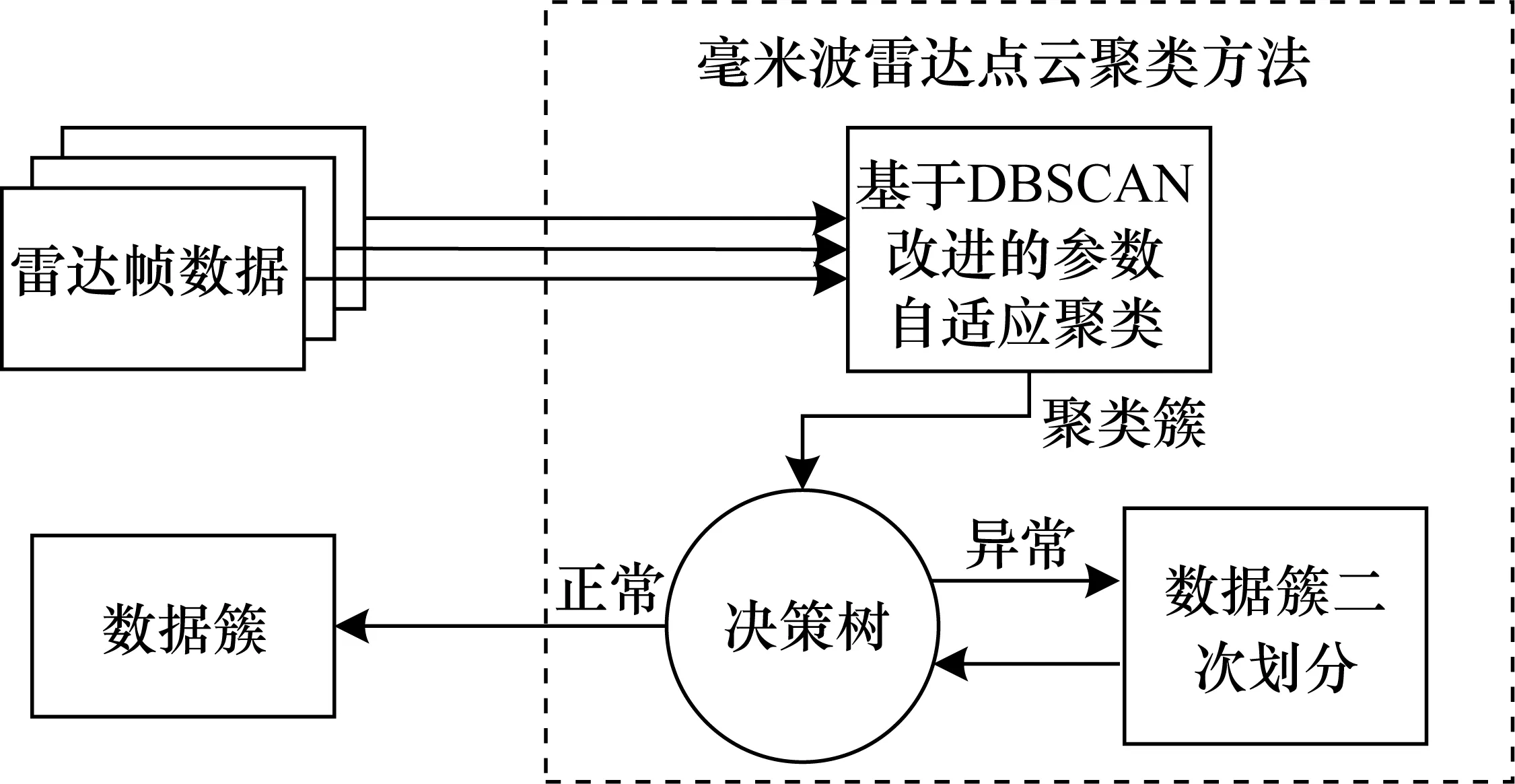
图2 雷达多目标点云聚类方法框架
为解决雷达点云输出稀疏问题,可采用多帧数据融合处理方法。从方法框架中可以看出,该方法主要分为2个部分。
① 为解决雷达点云数据点云分布不均匀和存在大量噪点杂波的影响,采用基于DBSCAN改进的参数自适应聚类算法对雷达单/多帧数据进行聚类。
② 为解决密度聚类算法会对密度相似空间点进行无限制地几何扩张,从而导致数据簇属性不具备单一性问题,将聚好的数据簇通过CART(Classification and Regression Tree)决策树进行目标数归类,对目标数大于1的异常数据簇使用k均值聚类算法进行二次划分。
2 基于DBSCAN改进的密度聚类
毫米波雷达点云数据为非凸数据集且存在杂波和噪声,适合采用密度聚类方法处理。由于雷达点云数据均匀性差,需对传统的DBSCAN聚类算法进行改进,改进的聚类算法能够根据K个最近邻点判断目标点处密度的分布来自适应调整聚类半径参数,解决雷达点云数据存在的分布不均匀问题。
2.1 传统DBSCAN聚类算法
DBSCAN是基于密度的聚类算法,该算法对噪声点不敏感,有较好的滤除噪点能力,能发现任意形状的簇。DBSCAN算法需给定2个参数:邻域半径Eps和核心点数阈值pts,这2个算法参数用来定义数据的密集特征,原算法中这2个参数均为固定值,这导致了DBSCAN算法对数据均匀性要求较高,数据的稀疏程度会直接影响聚类的效果。
2.2 基于DBSCAN改进的参数自适应聚类算法
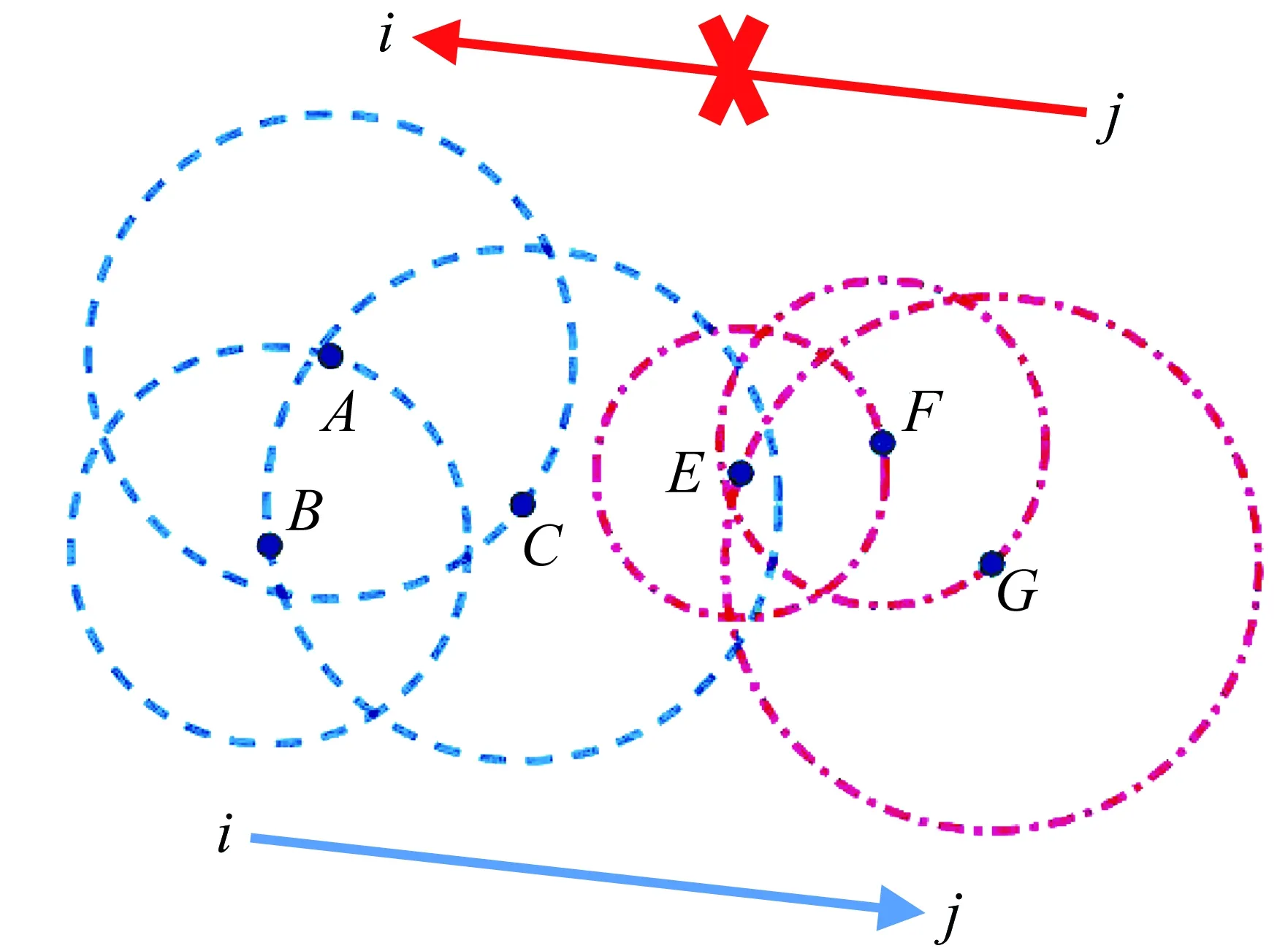
雷达点云数据沿径向发散,存在角分辨率低、输出稀疏、均匀性差等缺点,因此需针对原算法中的固定参数邻域半径Eps进行自适应调整。邻域半径参数自适应的工作原理如图3所示。
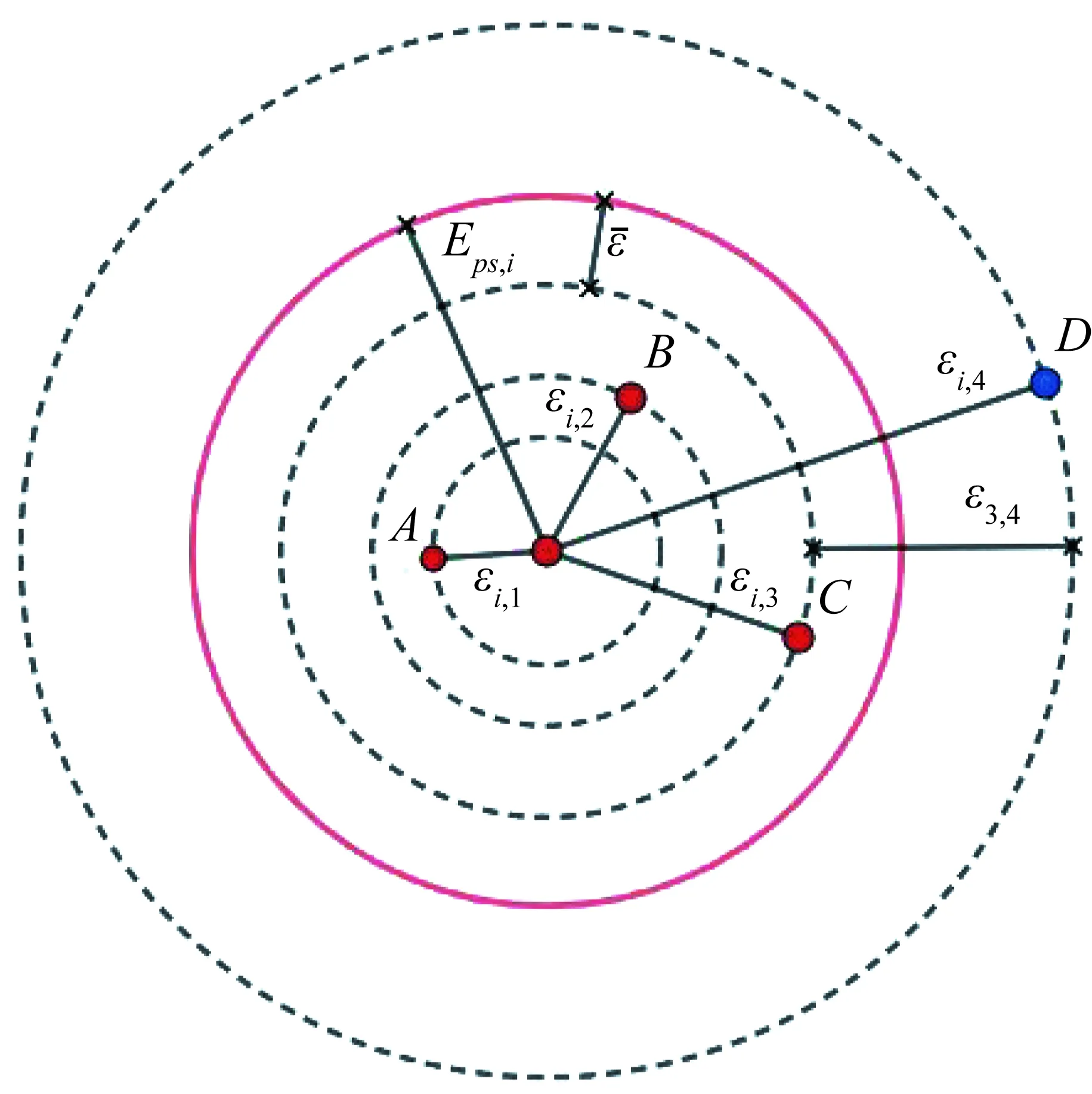
图3 邻域半径参数自适应工作原理
邻域半径Eps的选取需要考虑目标点i处空间点的密度分布,基于KNN(K-Nearest Neighbor)算法思想,选取目标点i处的K个近邻点来研究空间点间的拓扑关系,K值一般稍大于或等于核心点数阈值pts。图3中,选用了目标点i处的4个近邻点进行空间密度特征分析,即K=4,图中标注为A、B、C、D,并分别计算目标点i与第j个近邻点的欧式距离为
(1)
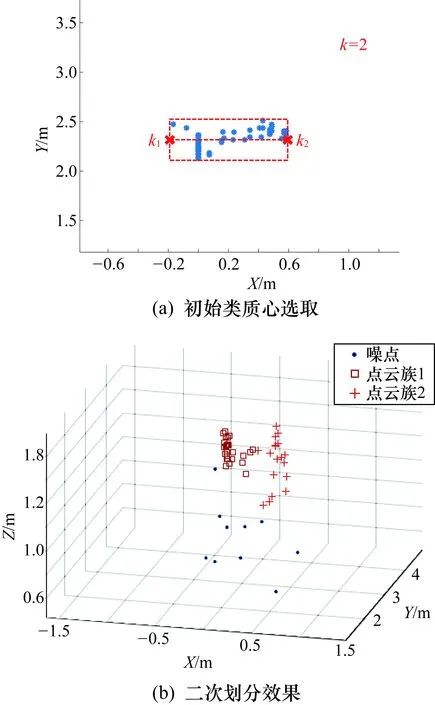
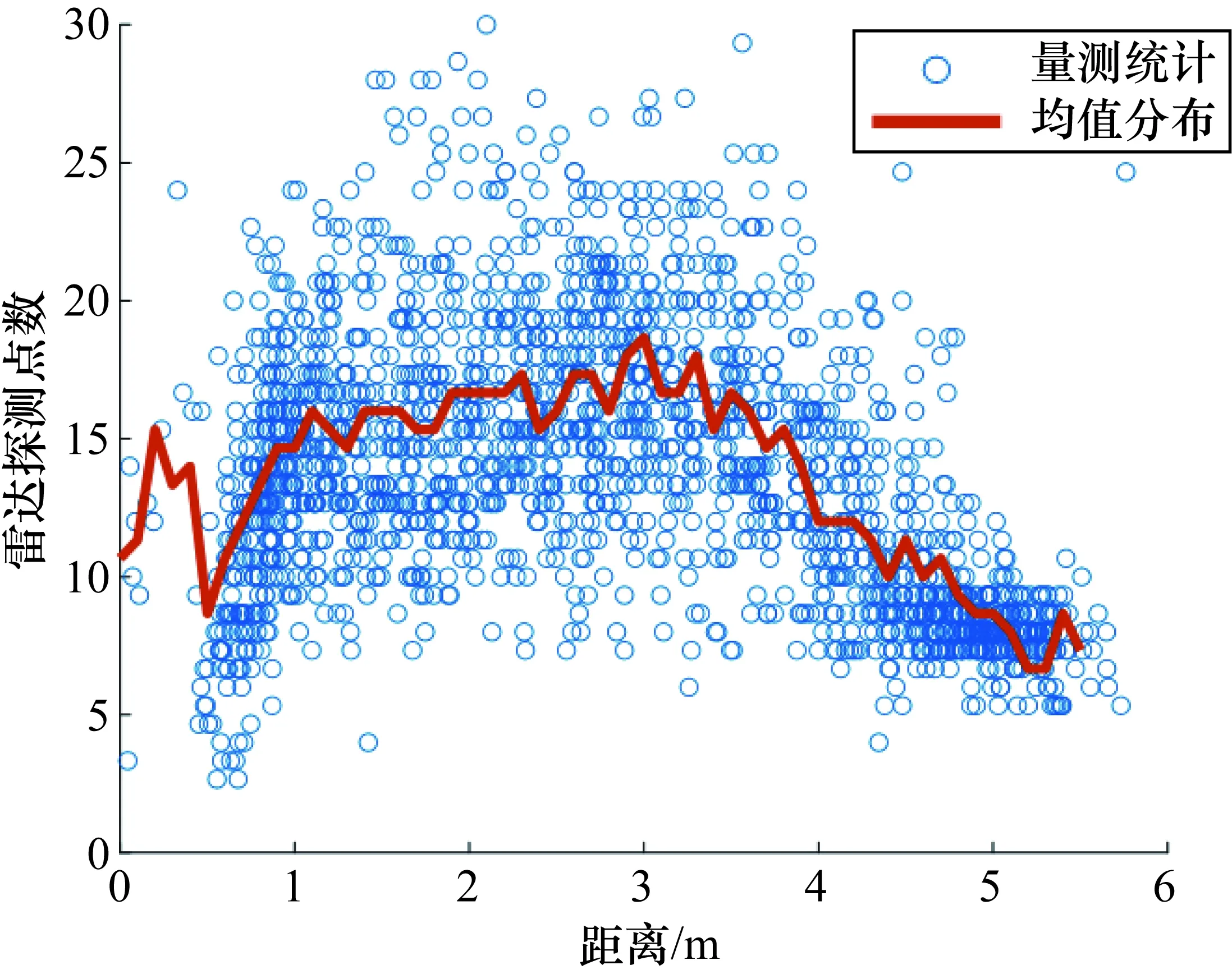
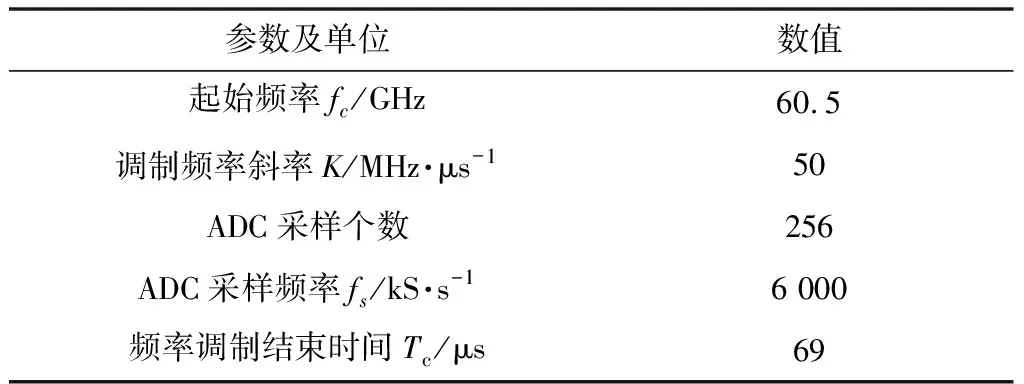
式中:xi、yi、zi为目标点i的空间三维坐标;xj、yj、zj为目标点i的第j个最近邻点的空间三维坐标,0 用目标点i与2个相邻近点的距离差大小来判断近邻点之间的相似度。 (2) 如果εj,j-1大于发散阈值ε,则认为两近邻点的相似度小,同时通过传递性可认为目标点i与第j个最近邻点相似度小,则选取目标点i的第j-1个最近邻点距离作为邻域半径Eps的决定因素之一。 同时,针对毫米波雷达点云数据在径向距离方向的发散,还需要考虑目标点i与m个近邻点间的发散程度为 (3) 式中:0 改进的密度聚类算法对邻域半径Eps参数分别根据目标点与第k个最近邻点距离和目标点近邻空间点的发散程度来进行自适应地调整。 Eps,i=Eps,knn+Eps,ε (4) 由图3可以看出,ε3,4明显大于发散阈值,因此k值取3,红色圆形实线即为目标点i的邻域半径参数自适应结果。 在改进的DBSCAN聚类算法中,参数邻域半径Eps由目标点自适应确定,会导致数据处理存在不对称性[7],即初始点选择的不同可能出现聚类效果不同的情况,如图4所示。为此,在改进算法中添加一条规则:核心点之间密度可达的同时需要满足对称性,即核心点之间需要相互密度可达才能聚成一类。 图4 自适应处理存在的数据不对称性 通过上述改进的聚类算法虽可解决毫米波雷达点云数据存在噪点杂波和点云分布不均匀的缺点,但还存在着多人密集情况下点云划分困难的问题。由上述算法聚类的数据簇会对密度相似的空间点间进行无限制地几何扩张,如图5所示,导致数据簇属性不具备单一性,甚至出现多人密集情况下多个目标源点云数据聚成一类的现象,图5(c)中通过密度聚类形成的点云簇1包含了2个目标源的量测信息。 图5 密集点云聚类几何扩张示例 同时,在扩展目标检测中,目标不同部位的数据属性也不同。因此,不能只单从空间点间的拓扑关系来聚类,还需要对聚类数据簇进行实际目标数的归类分析,对异常数据簇进行更加精准的二次划分。 由改进的聚类算法对密度相似的空间点间进行几何扩张可能导致异常数据簇没有一个明显的数据分界线,因此需要使用先验知识对数据簇进行目标数归类分析。本文采用CART算法来构建决策树,针对不同目标、环境和帧数叠加的应用背景,分别采集不同目标群的数据簇作为训练样本数据,用数据簇的三维空间轮廓长度、面积和所包含的点云数目构造样本特征向量,参照实时同步图像样本数据簇所包含的实际目标源是否为单一目标源来赋予样本类标签,通过分析每个结点处样本特征的基尼指数,选择基尼指数最小的特征及其对应切分点作为最优特征与最优切分点。依据最优特征与最优切分点,从现结点生成2个子结点,将数据集往下细分,最终形成二叉树形式的决策树。 采用K均值聚类算法(K-means Clustering Algorithm)对异常数据簇进行二次划分,通过不断迭代求解的划分聚类算法,以距离度量作为数据相似度的依据,根据与k个已知类质心的相似度将数据分为k类。将密度聚类后的数据簇送入构建好的决策树中,由决策树给出异常数据簇中的目标数,并作为K-means算法的k值入参。 对于K-means算法,需要注意的是k值准确性和k个初始类质心选取,k个初始类质心的位置选择对最后的聚类结果和运行时间都有很大影响。判断异常数据簇附近是否存在邻近的跟踪目标,如果存在,则将邻近跟踪目标位置信息作为算法初始类质心的位置;否则在异常数据簇最大轮廓方向选取距离差异较大的k个特殊点作为初始质心的位置。选用欧式距离作为距离度量,将异常数据簇的数据子集根据相似度大小归类到k个集合中,然后分别对每个集合求均值(更新类质心),重复迭代使得每个样本和所属集合的类质心的距离平方误差最小。 以图5中密集点云几何扩张聚类所生成的异常数据簇为例,对该数据簇进行二次聚类,结果如图6所示。其通过决策树得到的目标数为2,由于不存在相邻的2个跟踪目标,在点云簇X-Y平面上的X轴轮廓方向进行初始质心位置选择,分别为k1和k2。由图6(b)可以看到,通过二次聚类,可有效且准确地划分开多目标密集点云。与其他雷达聚类算法相比[14-15],通过K-means算法对异常数据簇进行二次划分有效地解决了由于空间点间的密度相似所导致几何扩张过大、不能代表单一属性和多目标数据聚成一簇等难题。 图6 异常数据簇的二次聚类 改进的雷达点云聚类算法中,需要设置的参数主要有核心点数阈值pts、K个近邻点的K值、发散阈值ε。各个参数的定义和设置如下。 (1) 核心点数阈值pts:是定义核心点对象的重要指标,如图7所示,为单个人员目标雷达探测点数的统计,参考均值分布曲线可将pts数值区间设置为3~6。 图7 单个人员目标的雷达探测点数统计 (2)K个近邻点的K值:K近邻点的K值依据核心点数阈值选取,一般稍大于或等于核心点数阈值。 (3) 发散阈值ε:近邻点距离差εj,j-1的发散阈值,若小于发散阈值则数据的相似性大,视为同类,否则数据的相似性小,视为异类。发散阈值ε可用函数表示为 (5) 式中:α0为给定的距离阈值;β为随径向距离变化的线性渐变量。具体数值选取依据人员目标距离特性和雷达距离分辨率dres。 (6) 式中:c为光速;Bw为雷达信号调制带宽。 将雷达单/多帧点云数据经过坐标系转换得到算法的入参数据集D={d1,d2,d3,…,dn},其中包含了n个目标点对象,每个目标点对象具有3个维度的属性dn={rnx,rny,rnz}。算法出参数据集为F={f1,f2,…,fm},其中,fm={rmx,rmy,rmz,llabel,m},llabel,m为对应的点云簇标签,基于毫米波雷达的密集目标点云聚类方法具体步骤如下。 ① 雷达数据预处理,对雷达单/多帧点云数据进行时空校准和野值剔除,形成点云数据集作为算法的入参。 ② 使用基于DBSCAN改进的参数自适应聚类算法对数据集进行遍历聚类。 ③ 将聚类好的数据簇送入决策树中进行目标数归类。 ④ 对于目标数大于1的数据簇进行二次划分聚类,生成最终聚类结果。 为评估改进算法及对比算法,引用2个评价指标[6]:聚类精确度(Accuracy,AC)和聚类正确率(Accuracy Rate,AR)。聚类精确度用于比较输出聚类簇标签和数据提供的标签,对于原始点云数据中人员目标的多个局部量测可拆分成多个信号源看待,其中局部信号源可分为上下肢体和躯干,则聚类精确度为 (7) (8) 聚类正确率用于比较正确聚类簇数与实际探测目标个数。目标聚类正确的定义:目标聚类形成的聚类簇与实际探测目标一一对应。聚类正确的量化标准为:单目标AC≥70%。实验中使用同步记录画面作为真实结果对聚类效果进行验证,聚类正确率公式为 (9) 式中:S为目标聚类正确个数;P为有量测信号前提下的实际探测目标个数。 实验雷达选用美国德州仪器(TI)生产的IWR6843-ISK型雷达传感器,该型号雷达的工作频率为60~64 GHz,雷达天线为3发4收,对于IWR6843的参数配置如表1所示。测量时雷达传感器安置在距地面高度为2.5 m处,向下倾斜30°。 表1 IWR6843参数配置 为验证改进点云聚类方法的有效性,在室内场景进行了多次人员检测实验分析,同时采用2帧雷达数据融合方式以显示更全面的人员目标量测信息。在核心点数阈值pts统一的条件下进行了多次检测实验并分别与Eps=0.2 m、Eps=0.5 m的DBSCAN算法聚类效果进行对比,结果如图8所示。从图8(c)中可以看出,参数Eps=0.2 m时的DBSCAN聚类算法只能有效检测到4个人员目标的数据簇,将其中1个目标量测信息当作噪声滤除,导致出现了漏检情况,聚类效果与实际情况存在较大的偏差;观察图8(d)可知,参数Eps=0.5 m时的DBSCAN聚类算法可以检测到5个人员目标,但是聚类效果粗糙,点云簇1中包含了人员目标多个肢体部位的量测信息,数据簇属性缺乏单一性,并且包含了大量的噪声信息,没有较好地滤除噪声;从图8(e)中可以看出,使用本文改进的点云聚类方法所得的聚类效果相对更精准,既可以有效地滤除噪声杂波,又能最大程度上利用真实的量测信息,同时还保证了数据簇属性的单一性,其中点云簇5和点云簇6是通过第2次聚类所得到的,分别代表了人员目标的胸腔和肢体信息。 针对该实验场景共300帧数据进行量化统计,使用上文聚类效果评价指标评估本文改进的点云聚类方法的有效性,并分别与参数为Eps=0.2 m、Eps=0.5 m的DBSCAN算法聚类效果评估进行对比,聚类效果量化统计结果如表2所示。 表2 聚类效果量化统计结果 在多人密集情况下,Eps=0.5 m的DBSCAN算法聚类效果粗糙,容易出现误检导致聚类精确度较低。Eps=0.2 m的DBSCAN算法在多人密集情况下聚类精确度表现较好,但随着人数增加,单目标点云数减少且稀疏,容易出现漏检导致聚类正确率较低。而与其他算法对比,改进方法的聚类精确度和聚类正确率均为最高,分别为93.8%、96.5%,聚类精确度的提升最为明显。 综合以上实验结果可以看出,传统的DBSCAN聚类算法在固定的参数下无法适应毫米波雷达点云数据稀疏、均匀性差的特点,如果为追求精度将Eps邻域半径设置地较小,虽然可以很好地滤除噪声,但同时会忽略大量真实的量测信息,导致目标漏检;而Eps邻域半径设置地较大的时候,聚类结果会包含了大量的噪声和虚假目标信息,聚类粗糙且数据簇属性缺乏单一性,导致目标误检。而本文改进的点云聚类方法是有效的,更加适应毫米波雷达点云数据的特性,所采用的基于DBSCAN的自适应参数聚类算法既可有效地滤除噪声杂波,又能最大程度地利用真实的量测信息,而对异常数据簇的二次聚类又保证了数据簇属性的单一性,聚类效果更加细腻和准确,同时也更适用于多目标密集的复杂情况。 针对毫米波雷达点云数据特性,同时考虑多目标点云密集的复杂情况,提出一种毫米波雷达点云的密度和划分联合聚类方法,通过实验分析改进的点云聚类方法可以得到如下结论。 ① 采用基于DBSCAN改进的参数自适应聚类算法可以自适应地寻找聚类过程中所需要的最佳参数并实现聚类,解决了聚类过程中毫米波雷达点云数据存在噪点杂波和点云分布不均匀的影响。 ② 通过对异常数据簇进行划分聚类,解决了密度聚类算法会对密度相似的空间点进行无限制地几何扩张,从而导致数据簇属性不具备单一性的问题,同时也解决了多目标密集情况下多个目标源的点云数据聚成一类的问题,实现了对多目标点云数据精准聚类划分的效果。 在未来的工作中,将通过多传感器数据融合解决目标遮挡、探测盲区等情况所导致的目标量测数据丢失问题,并进行数据簇与跟踪目标之间数据关联性的研究,构建完整有效的目标识别跟踪与姿态检测系统。
3 异常数据簇的划分聚类
3.1 决策树归类
3.2 数据簇二次划分
4 聚类算法设置与评估指标
4.1 聚类参数设定及聚类过程
4.2 聚类效果评估指标
5 实验对比与结果分析

6 结束语
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21制造技术与机床(2019年9期)2019-09-10 07:36:54小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24西南交通大学学报(2018年6期)2018-12-18 02:22:28电子测试(2017年15期)2017-12-18 07:19:27河北遥感(2017年2期)2017-08-07 14:49:00衡阳师范学院学报(2016年3期)2016-07-10 07:16:27火控雷达技术(2016年3期)2016-02-06 02:30:26智能系统学报(2015年4期)2015-12-27 09:38:39百科探秘·航空航天(2015年4期)2015-11-07 07:04:34