原子陀螺研究进展及展望
2023-11-08 02:06:58骆曼箬李绍良黄艺明吴招才
测控技术 2023年10期
骆曼箬,李绍良,黄艺明,张 弛,吴招才,刘 华*
(1.上海交通大学 电子信息与电气工程学院,上海 200240; 2.上海航天控制技术研究所,上海 201109;3.自然资源部 第二海洋研究所,浙江 杭州 310012)
陀螺仪是惯性导航系统中的核心器件,用于测量载体运动的角加速度。自20世纪70年代起,随着现代物理和量子技术的不断发展以及微制造加工技术的不断突破,出现了继机械陀螺、光学陀螺和MEMS陀螺之后的第四代陀螺——原子陀螺。原子陀螺以碱金属和惰性气体原子为工作介质,利用原子自旋或波包Sagnac效应敏感载体转动信息,具有精度高、灵敏度高和体积小等特点,在惯性导航和军民领域表现出巨大的发展潜力和应用价值,已成为国内外新型惯性器件的重点研究对象之一。惯性技术作为国防装备中的关键技术,受到世界各国的高度重视,并且投入了大量的人力、物力、财力。在美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)的Micro-PNT C-SCAN、PINS HiDRA和A-PhI等项目的大力支持下,原子陀螺的研究获得了一次又一次的突破性进展。
当前原子陀螺主要分为核磁共振陀螺(Nuclear Magnetic Resonance Gyroscope,NMRG)、无自旋交换弛豫陀螺(Spin Exchange Relaxation Free Gyroscope,SERFG)和原子干涉陀螺(Atom-Interferometer Gyroscope,AIG),本文将对它们国内外的研究历程和现状进行详细介绍,并着眼于当前研究领域的相关动态,对原子陀螺的未来发展趋势进行展望,最后针对国内的原子陀螺技术研究给出一些思考。
1 研究进展
原子自旋陀螺主要包括面向中高精度战术型应用的磁共振陀螺仪和面向超高精度战略型应用的无自旋交换弛豫陀螺仪。核磁共振陀螺利用原子核自旋敏感载体转动信息,是工程化程度最高的原子陀螺仪,目前处于工程样机阶段,主要面向中高精度战术型应用。SERF陀螺仪利用电子自旋敏感载体转动信息,目前还处于原理样机阶段,主要面向超高精度战略型应用。原子干涉陀螺是目前理论精度最高的原子陀螺,受到世界各国的广泛关注,目前主要为冷原子干涉陀螺。
核磁共振陀螺基于核磁共振原理,通过检测惰性气体原子核自旋磁矩在静磁场中的拉莫尔频率变化获取载体转动角速度,具有精度高、体积小的特点。由于核磁共振陀螺没有运动部件,对振动不敏感,抗干扰能力强,理论上动态测量范围大,是当前发展最为成熟的原子陀螺。基于SERF态原子自旋的进动可以实现超高灵敏度的惯性测量。SERF陀螺仪中碱金属电子在SERF态自旋工作,利用碱金属电子在惯性空间自旋的定轴性敏感载体转动信息,具有10-8(°)/h超高理论精度的特点,但其动态范围较小。原子干涉陀螺的工作原理不同于NMRG和SERFG,是基于物质波Sagnac效应,通过物质波的干涉现象获取载体的转动信息,其理论精度可达10-13(°)/h,在航空领域有广阔的应用前景。表1为各原子陀螺的对比。

表1 原子陀螺对比
1.1 核磁共振陀螺
核磁共振陀螺的工作过程包括原子极化、核磁共振及角速度解算,其工作原理如图1所示。自旋交换光泵浦极化原子核,从而形成宏观磁矩;闭环控制的射频磁场使原子系综发生核磁共振,使该宏观磁矩绕静磁场做拉莫尔进动,当载体转动时,其转动角频率将耦合到磁矩进动频率中,通过检测该宏观磁矩的进动频率即可解算载体转动信息。
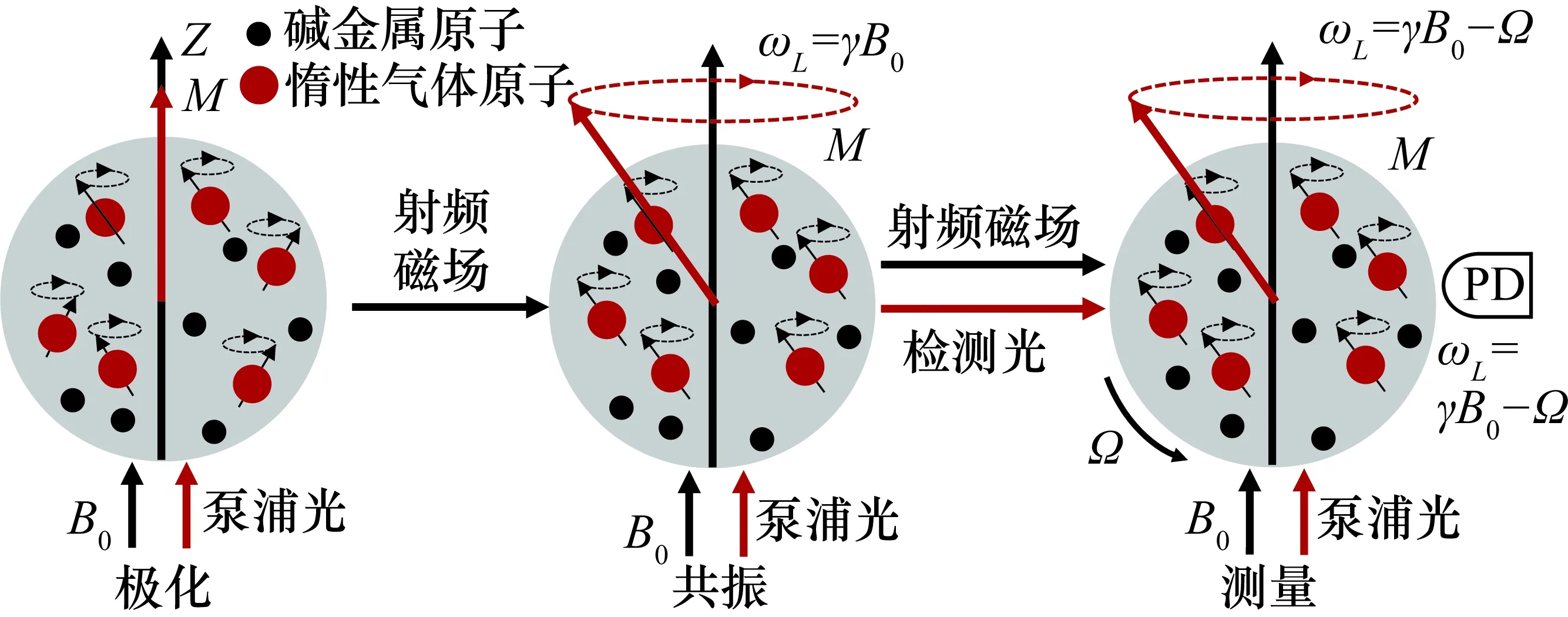
图1 核磁共振陀螺工作原理
欧美国家从20世纪60年代起就对核磁共振陀螺技术展开了研究并取得了阶段性成果,主要公司代表为Litton和Singer-Kearfott。之后,由于核磁共振陀螺仪遭遇技术瓶颈,无法再在提高精度、减小体积、降低成本等问题上有更大突破,被认为没有发展前景而出现停滞。直到21世纪,量子技术理论体系不断完善,量子技术、微纳米技术和微加工制造工艺等技术快速发展,核磁共振陀螺仪的研发又再次成为惯性技术领域的研究热点,并在原有的基础上取得了显著的进展。在美国DARPA的Micro-PNT项目支持下,Northrop Grumman公司(前Litton公司)开展了核磁共振陀螺的相关研究,历经4个阶段,在小型化和性能提升上取得了非常显著的研究成果,于2014年,研制出了体积为5 cm3、零偏稳定性优于0.01(°)/h的核磁共振陀螺,并在2017年建立了相应的惯性导航系统。美国核磁共振陀螺的主要发展历程如图2所示。
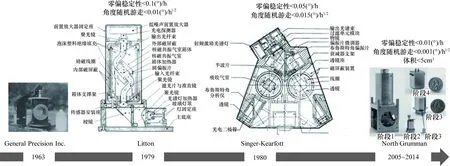
图2 国外核磁共振陀螺主要发展历程
此外,美国国家标准与技术研究院(National Institute of Standards and Technology,NIST)和美国加州大学欧文分校的Shkel实验室基于微加工技术,共同致力于芯片级核磁共振陀螺的研究[1-2],重点探索了微小型核磁共振气室的加工制造工艺,并通过折叠式结构和传统MEMS制造了微型核磁共振陀螺,推动了核磁共振陀螺的工程化实现。Shkel实验室的研究历程如图3所示。
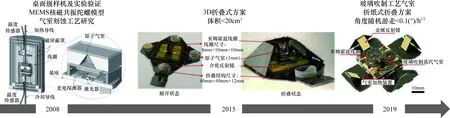
图3 Shkel实验室的微型核磁共振陀螺研究历程
最新研究还包括德国博世公司的Cipolletti等进行的核磁共振陀螺瞬态特性的建模,并给出了基于自旋的导航级陀螺仪的参数优化方法[3]。德国博世公司的Riedrich-Möller等[4]开展了在静磁场条件下微型气室中Xe原子自旋进动的自由感应衰减测量实验,并计划对磁屏蔽、电子器件和激光器件等系统组件进行小型化。俄罗斯圣光机大学的Zavitaev等[5]研究了影响核磁共振陀螺零偏稳定性的因素,分析了在振动工作条件下核磁共振陀螺的偏移,并得出了有效设计核磁共振陀螺的方法。俄罗斯联邦国家研究中心提出了一种利用核磁共振陀螺仪自激振荡电路的Q因子实现陀螺仪偏置补偿的方法,从而提高陀螺精度[6]。
近年来,核磁共振陀螺技术逐渐发展和成熟,已从实验室走向工程化、装备化,其中美国Northrop Grumman公司已研制出面向军事领域的微小型导航级核磁共振陀螺仪。
我国对核磁共振陀螺的研究,在成本、性能等方面与国际先进水平仍存在较大差距,目前还处于原理样机阶段。国内的主要研究单位有北京航空航天大学、国防科技大学、北京自动化控制设备研究所、北京航天控制仪器研究所、西安飞行自动控制研究所等。北京自动化控制设备研究所在“十二五”863计划中承担“基于磁共振的微小型原子自旋陀螺仪关键技术”项目,在攻克了相关量子操控技术实现原理验证后,完成了对气室、线圈和磁屏蔽装置的小型化,在2016年研制出零偏稳定性优于1(°)/h,角度随机游走优于0.2(°)/h1/2,体积50 cm3的原理样机,其研究进程如图4所示。

图4 北京控制设备研究所核磁共振陀螺研究历程
1.2 无自旋交换弛豫陀螺
无自旋交换弛豫陀螺工作过程主要包括原子SERF态制备以及原子自旋进动检测,其工作原理如图5所示。磁屏蔽装置使原子处于近零磁环境,此时碱金属原子的拉莫尔进动频率大幅降低,同时由于高密高压环境使自旋交换率极大地提高,从而充分抑制原子的自旋交换弛豫,实现SERF态。当载体转动时,由于电子自旋的定轴性,检测激光与电子自旋产生的宏观磁矩M间存在夹角α,通过测量该角度即可得到载体转动信息。
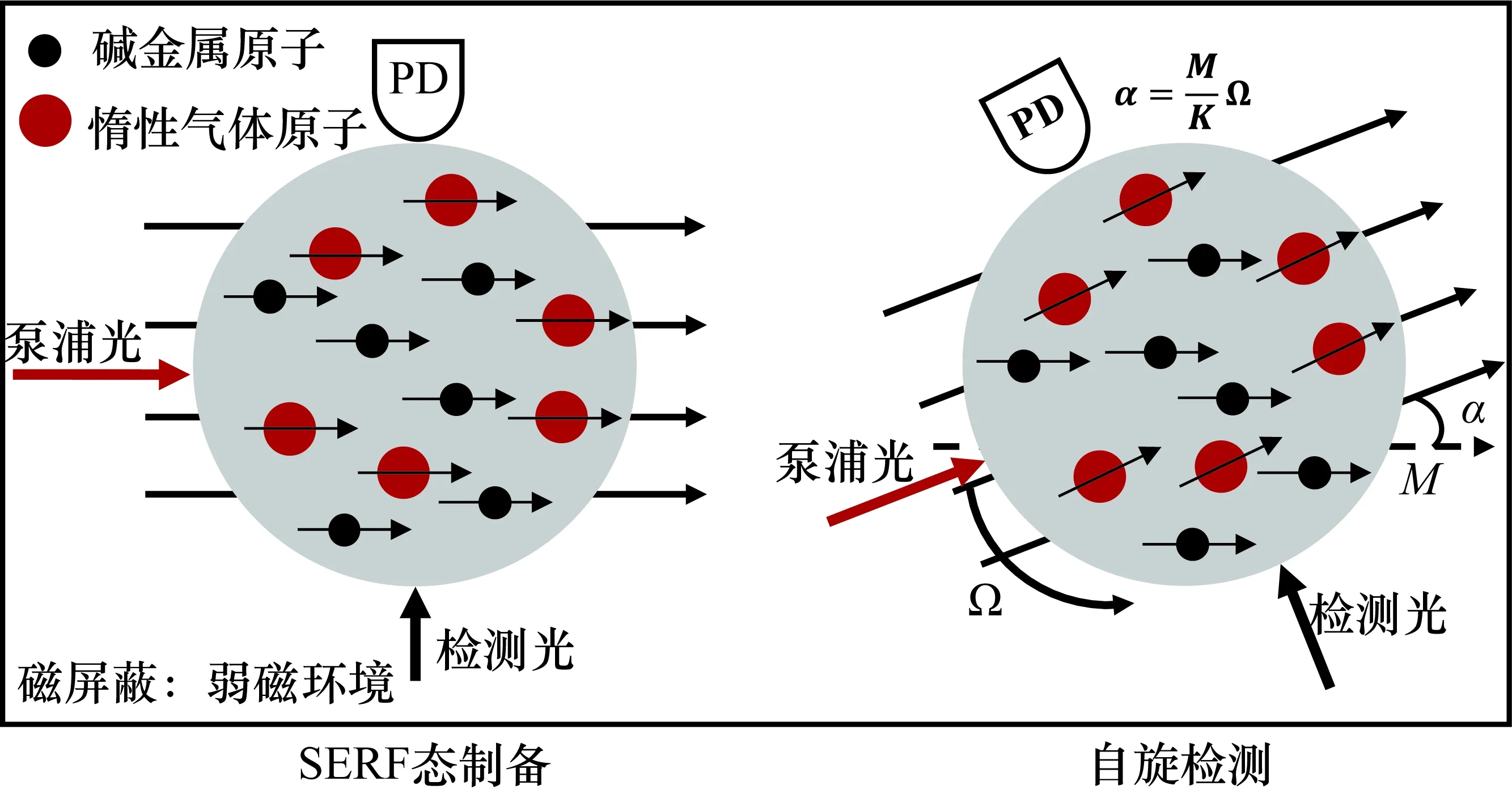
图5 无自旋交换弛豫陀螺工作原理
21世纪初期,普林斯顿大学的Romalis团队首次实现了基于SERF效应的超高灵敏度原子磁强计,为实现超高灵敏度的惯性测量提供了良好基础。随后,普林斯顿大学物理系[7-8]的研究小组率先开展了SERF陀螺技术研究,并成立Twinleaf公司,实现了研究成果的转化。2009年起,Twinleaf公司连续获得美国DARPA资助,旨在研制高精度小体积的SERF陀螺。表2给出了其研究历程。图6为其第一代和第二代SERF陀螺仪实验装置。

图6 普林斯顿大学SERF陀螺实验装置

表2 普林斯顿大学SERF陀螺研究历程
除此之外,美国的Honeywell公司也开展了芯片级SERF陀螺的相关研究,设计了相应的结构和工艺方法[9]。法国航空航天实验室于2013年开始研究基于Rb-Xe的SERF陀螺[10]。2016年,普林斯顿大学研制出以3He、129Xe和87Rb为工作物质的耦合磁强计SERF核自旋陀螺[11-12]。2018年,在C-SCAN项目的支持下,普林斯顿大学Romalis团队和Twinleaf公司使用π脉冲序列的87Rb磁强计[13]抑制铷原子之间的自旋交换弛豫,在直径10 mm的气室情况下,实现了角度随机游走0.025 (°)/h1/2,零偏稳定性优于0.01 (°)/h[8]。此后,国外关于SERF陀螺的报道较少。
国内北京航空航天大学房建成院士团队的SERF陀螺研究最具代表性。2008年,该团队在国内率先开展了基于原子自旋的超高灵敏度磁场测量与惯性测量技术研究。2013~2018年,在国家自然科学基金委重大仪器专项的支持下,该团队进行了SERF陀螺原理样机迭代更新,并于2018年研制了零偏稳定性优于0.05 (°)/h的双轴SERF陀螺[14]。北京航空航天大学SERF陀螺研究历程如表3所示。北航第一代SERF陀螺如图7所示。

图7 北航第一代SERF陀螺[25]
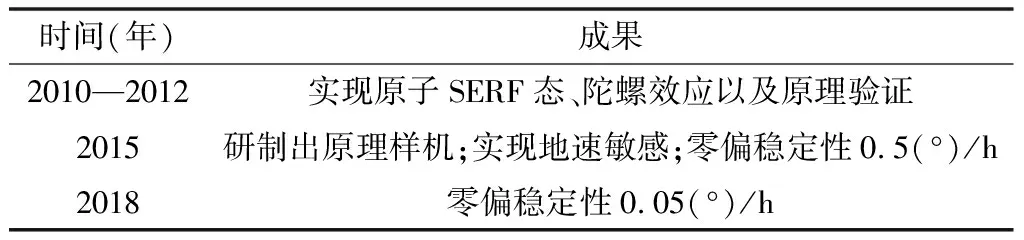
表3 北京航空航天大学SERF陀螺研究历程
随后,北航团队为提高SERF陀螺性能以及小型化,围绕原位磁强计[15-16]、原子气室加热[17-19]以及磁屏蔽[20-22]等进行了研究。2017年,该团队提出一种测量横向光位移的测量方法,通过布洛赫方程稳态解推导横向磁场补偿与光位移之间的关系,并通过降低光位移来抑制陀螺的低频漂移,使双轴SERF陀螺零偏稳定性优于0.01 (°)/h[23]。2019年,该团队已成功研制出小型化SERF陀螺原理样机。2020年,该团队研制的原理样机的零偏稳定性达到0.001 (°)/h量级[24]。
另外,北京航天控制仪器研究所[26-28]也开展了SERF陀螺技术的研究工作,并实现了原理验证以及原理样机集成。
1.3 原子干涉陀螺


图8 原子干涉陀螺原理图
1997年,美国斯坦福大学Gustavson等首次演示了使用热原子束的高灵敏度原子干涉陀螺,实现短期灵敏度2×10-8(rad/s)/Hz1/2,随后在2000年将短期灵敏度提升到6×10-10(rad/s)/Hz1/2,达到当时世界上的最先进水平。
随着激光冷却原子技术的发展,激光操控冷原子系统各功能结构逐渐模块化,使得冷原子干涉陀螺不仅具有更高的精度和灵敏度,且在集成化和小型化上更具优势。原子干涉陀螺开始由热原子束向冷原子团过渡。DARPA于 2003 年制定了“精确惯性导航系统(Precision Inertial Navigation System,PINS)”计划,与此同时,欧洲航天局(European Space Agency,ESA)制定了“空间中的高精度原子干涉测量技术(Hyper Precision Cold Atom Interferometry in Space,HYPER)”计划。这些计划的开展极大地促进了原子惯性技术的发展。美国的斯坦福大学、法国巴黎天文台和德国汉诺威大学等研究单位正是在这些计划的支持下,在原子干涉陀螺的研究上走在了世界的前列[29-32]。
2004年,在DARPA的PINS项目计划支持下,斯坦福大学团队成立了衍生公司AOSense,并于2008年研制出集转动、加速度和重力梯度测量于一体的小型集成化可移动的混合传感器,敏感部分体积小于1 m3。此后,AOSense公司成功地为政府资助的许多项目设计并完成了最先进的冷原子传感器。斯坦福大学原子干涉陀螺原理样机如图9所示。
图9 斯坦福大学原子干涉陀螺原理样机
2006年法国巴黎天文台成功研制出六轴惯性敏感器,并在2009年研制出紧凑型铯原子干涉陀螺,主体尺寸为30 cm×10 cm×50 cm。其后,巴黎天文台一直致力于冷原子干涉陀螺的小型化和性能提升,在2019年实现零偏稳定性优于6.2×10-5(°)/h,灵敏度达到3×10-8(rad/s)/Hz1/2,图10给出了巴黎天文台冷原子干涉陀螺的主要更新迭代过程[31,33-35]。
德国汉诺威大学Rasel团队于2008年研制出紧凑型铷原子干涉陀螺,如图11所示,主体尺寸长度小于1 m,短期灵敏度为2×10-4(rad/s)/Hz1/2。随后经过技术迭代,陀螺的灵敏度及精度不断提升,表4给出了其主要技术迭代历程。
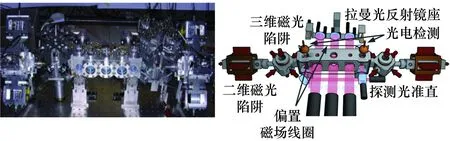
图11 德国汉诺威大学冷原子干涉陀螺
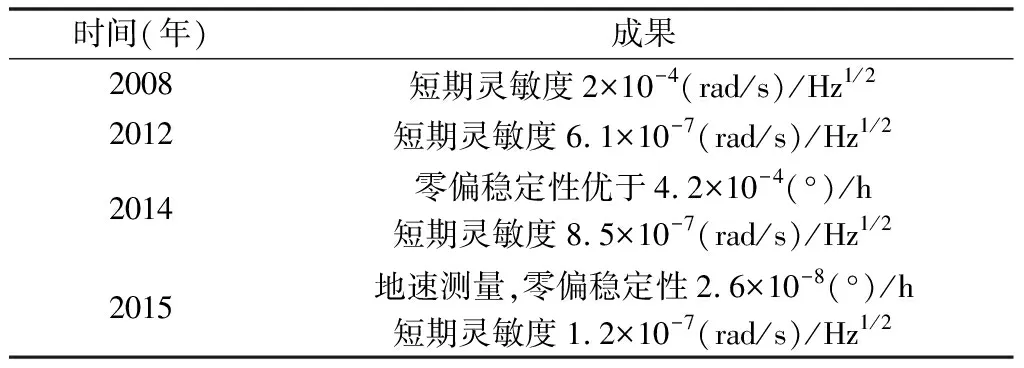
表4 德国汉诺威大学冷原子干涉陀螺研究历程
除此之外,美国的Sandia国家实验室[36]、康奈尔大学[37]以及NIST[38-42]也对冷原子干涉陀螺开展了研究工作。其中,NIST在成功实现芯片级原子钟和原子磁强计后,正致力于冷原子干涉陀螺的小型化研究。NIST的Donley团队通过对斯坦福大学提出的点源原子干涉技术(Point-Source Interferometry,PSI)进行改善,演示了一种使用厘米级原子气室的单束冷原子源多轴陀螺[40],如图12所示,最终实现加速度灵敏度为1.6×10-5/Hz1/2,旋转矢量的长期灵敏度约为5.8×10-4rad/s。NIST研制的系统为加速度计和陀螺仪的组合传感器,且实现方法比传统的原子干涉陀螺更为简单。
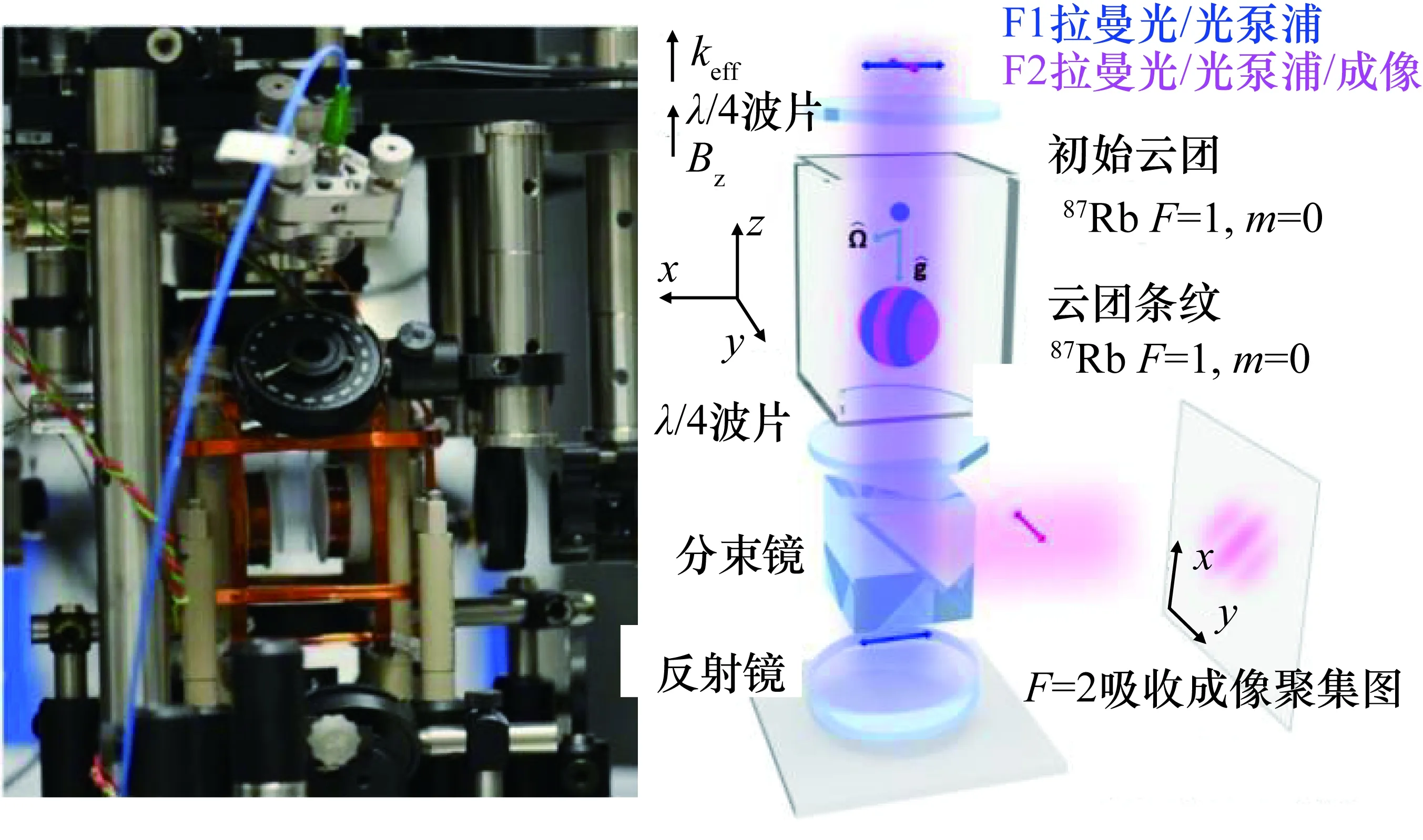
图12 NIST多轴组合惯性传感器
中国科学院和清华大学是国内最早开始研究冷原子干涉陀螺的机构,除此之外,哈尔滨工业大学[43]、华中科技大学[44-45]等也对原子干涉陀螺展开了研究工作。随着研究的逐渐深入和细致,我国的冷原子干涉陀螺也跻身世界前列。
中国科学院武汉物数所利用其从事脉冲型冷原子干涉仪研究中的技术积淀,于2010年在国内首次实现原子干涉陀螺Sagnac效应的实验演示。表5给出了从2016至今中国科学院物数所原子干涉陀螺的研究历程[46-48]。

表5 中国科学院物数所原子干涉陀螺研究历程
2017年,中国科学院研制的双原子干涉陀螺实现了地球自转速度测量。在2021年,中国科学院发表了其最新研究成果,经过参数解耦补偿重力效应后,通过拉姆齐-博德干涉仪实现马赫-曾德尔干涉仪中的拉曼光校准,性能得到极大地提升,为目前M-Z型原子干涉陀螺的国际最高水平,陀螺装置示意图如图13所示。

图13 中国科学院M-Z型原子干涉陀螺
2017年,清华大学精密仪器系提出了基于连续冷原子束的干涉陀螺方案[49],利用多普勒敏感的双光子受激拉曼跃迁进行原子波包的相干操控,实现短期灵敏度7.8×10-5(rad/s)/Hz1/2,系统带宽190 Hz,在保证系统灵敏度和紧凑型的同时也提高了系统带宽。2020年,清华大学精密仪器系提出了一种基于光栅芯片的多轴原子干涉陀螺,利用PSI技术和空间分辨检测,可以通过对干涉仪序列后的最终原子云进行成像,解码不同输入轴的空间条纹信息来测量多轴旋转,其装置如图14所示。
2 关键技术
原子陀螺的关键技术主要包括磁屏蔽、三轴磁补偿技术、原子极化技术、抗弛豫原子气室制备技术、核自旋磁场闭环补偿技术和冷原子团操控技术等。
从核磁共振陀螺的原理来看,周围磁场的波动将直接导致原子自旋进动频率的测量误差,因此需要使用极高性能的磁屏蔽装置将地磁场屏蔽到nT量级以下,并通过三轴磁补偿进一步降低磁场波动。对于静磁场的波动,一般使用两种同位素原子方案,如129Xe和131Xe,通过检测两者拉莫尔进动频率的差值来获取静磁场的波动情况并进行实时补偿。对于垂直于静磁场平面上的磁场波动,利用气室中的碱金属原子构建三轴原位磁力计,通过在三维线圈上通入一定的电流,补偿磁屏蔽后的残余磁场波动。上海交通大学郭阳等[50]在核磁共振陀螺中基于参数共振磁强计实现了剩余磁场的闭环补偿,将垂直于静磁场两个方向上的磁场补偿到了pT量级。
除此之外,原子极化是实现自旋式原子陀螺的前提。泵浦激光的频率的波动和气室温度的波动将引起气室内碱金属原子极化率的稳定性而影响陀螺性能。当前常用的激光稳频方案有波长调制稳频、饱和吸收谱稳频、双色激光稳频和调制转移光谱稳频[51]。原子气室的温度控制系统主要由无磁加热、温度检测和反馈电路组成。常用的方案是用双层平行反向电流柔性加热片包裹原子气室,将热敏电阻置于加热片和气室之间,再通过电路检测温度并使用控制程序实时调整加热强度来稳定气室温度。2019年,国防科技大学许国伟等[52]提出了一种直接利用透过气室的探测光来控制原子气室温度的方案,在不利用其余测温电阻和测温电路的同时实现了原子气室温度一小时内温度漂移仅为0.02 ℃。
SERF陀螺需要使碱金属电子在SERF态自旋工作,因此必须通过核自旋磁场闭环补偿使碱金属电子在无干扰的惯性空间自旋工作。要实现高质量的核自旋磁场补偿,首先需要快速找到随磁场变化而变化的核自旋磁场自补偿点。北京航空航天大学在2019年提出了通过锁定电子共振实现对补偿点的闭环控制[53],使碱金属电子自旋不受纵向环境磁场和惰性气体原子核自旋磁场的影响。
原子气室作为自旋式原子陀螺的核心敏感部件,从本质上决定了仪器所能达到的性能极限。原子气室的形状和材料、气室上的抗弛豫镀膜以及内部气体的种类和比例都将影响原子自旋弛豫时间,延长气室内原子的自旋态寿命可以提高仪器的测量精度和灵敏度。气室形状影响原子自旋进动磁场的分布,球形气室中原子进动磁场分布对称,对原子核自旋弛豫影响较小。气室内壁的抗弛豫镀膜能够有效避免原子与气室壁撞击后丢失自旋指向,延长电子自旋弛豫时间。目前常用的抗弛豫镀膜材料有长链烷烃类、烯烃类和有机氯硅烷。石蜡是最早用于抗弛豫镀膜的材料,但熔点较低,无法应用在高温气室环境。有机氯硅烷可应用于较高温度的原子气室镀膜,例如十八烷基三氯硅烷(OTS)可以在高温条件下允许碱金属原子发生2000次碰撞而不退极化。
原子干涉陀螺中,原子的干涉是通过拉曼光对原子的分束、反射和合束来实现的,其性能直接决定原子干涉效果。拉曼光的相位噪声直接导致干涉条纹的相移,功率噪声会使原子基态和激发态能级上的布居数发生变化,最终都会引入相位测量噪声。拉曼光是由一对满足偏振条件和频率条件且相位固定的脉冲光组成。当前激光锁相主要通过光学锁相环技术[54]和电学锁相环技术[55]实现。电学调制法利用电光调制器产生GHz量级的边带与其载波形成拉曼光。光学锁相则是通过两台种子光间的拍频与参考信号源获取相位误差,然后调节激光器输出相位,使两台种子光的频差和相位锁定在高稳、低噪声的参考源上。同时,由于原子干涉陀螺中的原子团制备、原子干涉和相位检测阶段均需要激光的参与,如何使用更少的激光器来搭建整个激光系统,通过激光的分时复用实现紧凑型冷原子陀螺也是当前的研究重点。
3 发展展望
3.1 芯片级原子光子器件
小型化、高精度依然是原子陀螺未来的发展趋势。原子陀螺系统通常包含激光系统和电磁系统等部件,受体积、质量和功耗的严重制约。受微纳加工工艺和集成电路制造的启发,将原子操控装置微型化甚至实现片上集成,通过微纳结构或器件产生可调控的电场、磁场和光场[56],芯片级的原子器件结合精密原子光谱学、原子气室硅微加工和先进的激光二极管技术,从而实现紧凑型、低功耗、高精度和稳定的测量仪器[57]。2018年,DARPA已经发布了原子-光子集成(Atomic-Photonic Integration,APhI)项目,旨在开发便携式光电集成电路(Photonic Integrated Circuit,PIC)替代原子物理期间的光学组件,保持原子俘获、冷却和操纵的能力。该项目分为3个阶段,并预计在第3阶段研制出原子-光电集成陀螺。
3.2 组合陀螺系统
利用传感器融合建立组合陀螺系统也是原子陀螺未来的发展方向之一。DARPA已于2012年在Micro-PNT中启动了芯片级组合原子导航仪(Chip-Scale Combinatorial Atomic Navigator,C-SCAN)项目[58],旨在探索冷原子陀螺、核磁共振陀螺等高性能原子惯性传感器的小型化和组合制造,通过组合算法将各陀螺部件组合为一个整体,从而改善单一原子陀螺在长期漂移、动态范围和启动时间上等一系列问题,促进陀螺综合性能的提升。通过组合陀螺系统和传感器融合实现优势互补将成为未来原子陀螺仪的主要发展方向之一。
3.3 新型原子陀螺
基于新的量子原理的原子陀螺将为惯性传感技术提供新的可能。金刚石NV色心(Nitrogen-Vacancy Center)陀螺就是一种与核磁共振陀螺和SERF陀螺原理大不相同的原子自旋陀螺,因其固态自旋密度高、基态与激发态能级结构稳定等特点,具有体积小的天然优势,同时可以进行多轴测量,为小型化低成本原子陀螺的实现提供新的研究方向,可以解决原子陀螺在集成与小型化方面的困难。目前已证实了基于金刚石NV色心的惯性测量方案的可行性[59-60]。2020年,俄罗斯列贝德夫物理研究所的Akimov团队基于动力学相位实现转动测量,实现了对金刚石NV色心陀螺的第一次原理验证[61]。
4 结束语
总的来看,原子陀螺技术已经逐渐成熟,研究也更加深入和细致。NMRG和SERFG对磁场非常敏感,磁抑制和磁补偿技术是制约其精度进一步提高的主要因素之一,可通过超导技术产生稳定、均匀的磁场环境或通过同位素对磁场漂移进行补偿。AIG精度的主要制约因素是原子干涉环路面积小,因此构建大面积干涉环路是提升AIG精度的重要研究方向。进一步提高原子陀螺测量精度以及长期稳定性,并在此基础上降低功耗、减小体积是当前的主要研究方向。微小原子气室制备、微小磁屏蔽装置制造以及芯片半导体激光器制造技术是减小陀螺体积的关键。
新一轮的科技革命和产业变革将给原子陀螺的技术进步和性能提升带来契机。原子陀螺的精度和长期稳定性的提升将有望在国防军用领域的大型战略武器平台得到广泛应用,同时也将在航空航天航海中的惯性导航系统以及姿态控制中发挥重要作用。在实现减小体积和降低成本后,将会极大地扩展其应用领域,在众多民用商用领域创造更多可能性。
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
中国设备工程(2021年24期)2021-12-31 02:37:48
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
汽车零部件(2019年5期)2019-06-13 06:25:50
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
广西电力(2016年5期)2016-07-10 09:16:44