基于测距传感器的汽车右转辅助系统设计
2023-11-08 07:01胡庆辉孙清巍陈元勇王于娟
汽车实用技术 2023年20期
胡庆辉,孙清巍,陈元勇,王于娟,高 扬
基于测距传感器的汽车右转辅助系统设计
胡庆辉,孙清巍,陈元勇*,王于娟,高 扬
(泰山职业技术学院,山东 泰安 271000)
为解决汽车右转过程中,右侧非机动车道视野不足的问题,文章提出在汽车前部安装测距传感器的方案加以解决。当右转向灯开启,或方向盘右转超过限定角度时,传感器开始工作,测量右侧行人相对汽车位置、前进速度、前进方向,并与汽车运行轨迹比对,计算出可能的碰撞时间及碰撞点,反映到中控屏上,以提醒驾驶员进行相关操作。经过研究发现汽车右转向20°/40°时,容易对非机动车道产生误判,本系统通过图像和声音对驾驶员进行提醒,避免交通事故。
右转辅助系统;测距传感器;碰撞点;碰撞时间
随着国内城市化进程加速,汽车的保有量越来越大,而电动自行车具有续航里程长、体积小,形式灵活等特点,尤其在上下班高峰期,其通勤时间比汽车更有优势。然而由于汽车、电动自行车特点及道路建设等问题,汽车与电动自行车之间的交通事故数量一直居高不下,2021年中国非机动车交通事故发生数量为29 969起,同比上升3.2%[1]。因为电动自行车结构简单且防护较差,每年因交通事故导致的死亡人数中,汽车、摩托车等机动车辆导致死亡人数均有下降,唯有非机动车辆造成的死亡和受伤人数同比上升[1]。尤其是在汽车右转过程中,与右侧直行电动自行车发生碰撞的概率明显高于其他情形,其主要原因是在汽车右转过程中,视野不充分,无法判断电动自行车的运动状态,尤其是在机动车与非机动车道间存在绿化带时,此问题更加突出。
针对以上问题,文章以测距传感器为主要工作元件,在车辆右转开始时对车辆右侧行人及非机动车运行状态进行数据采集,并与机动车运行参数进行比对,计算出可能的碰撞时间及碰撞点,提醒驾驶员控制车辆行驶状态,以达到避免交通事故的目的。
近年新能源汽车发展迅速,自动驾驶技术方兴未艾。关于汽车辅助驾驶系统的研究较多,其中吉林大学杨硕[2]进行了线控汽车制动换道系统研究;湖南大学曾玮攀[3]进行了转向辅助系统控制研究;边宁等[4]进行了半自动驾驶辅助系统研究,但是本文提出的辅助系统更注重拥挤道路下右转低速大转角时的行车安全,其传感器探测距离更长,且监测对象更具有针对性,同时可以作为拥挤道路下汽车驾驶的重要辅助系统。
1 汽车右转视野变化过程
在汽车行车过程中,充足的视野是保证行车安全的必要条件。对于大部分车辆来讲,前行视野得以充足保障,但车辆两侧及后方视野需要借助后视镜来完成,其可以保证驾驶员在座位上直接获取汽车后方、侧方和下方等外部视野,保证行车安全可靠。然而由于结构限制,后视镜视野不可能完全覆盖车身周边,看不到的地方为视野盲区。对一般家庭乘用车而言,右侧视野盲区(见图1),主要包括左右A柱盲区以及左右后视镜与B柱复合盲区。本研究只关注右侧盲区在车辆右转过程中问题。
图1的汽车在最右侧车道行驶,车道宽度为2.5 m,其中C车道为非机动车道(或绿化带),宽度为2 m,D车道为有绿化带情况下的非机动车道,宽度为2 m。车辆右侧盲区分别为A柱盲区和B柱与后视镜盲区,其中A柱盲区在车辆右转过程中,造成影响较小,本文主要研究B柱与后视镜盲区在车辆右转过程中所造成的影响。一般小汽车的最小转弯半径为6 m,但右转过程中,大部分情况不会用到最小转弯半径,以常用转弯半径10 m为例进行研究。B柱与后视镜盲区并不是完全看不到,但是需要驾驶员大角度扭头,在这种情况下,如果后排有乘客,通过后排车窗看到的视野很难保证,而且忽略了前进视野,很容易造成交通事故。同时大多数驾驶员并没有右转向后扭头看车况的习惯,因此,可以理解为完全盲区。A柱盲区和B柱与后视镜盲区之间的视野理论上也不能充足保证,因为副驾一旦有乘客,会影响通过车窗观察车况的视野,本研究中理解为完全视野。而实际情况下,能完全保证的只有后视镜视野。
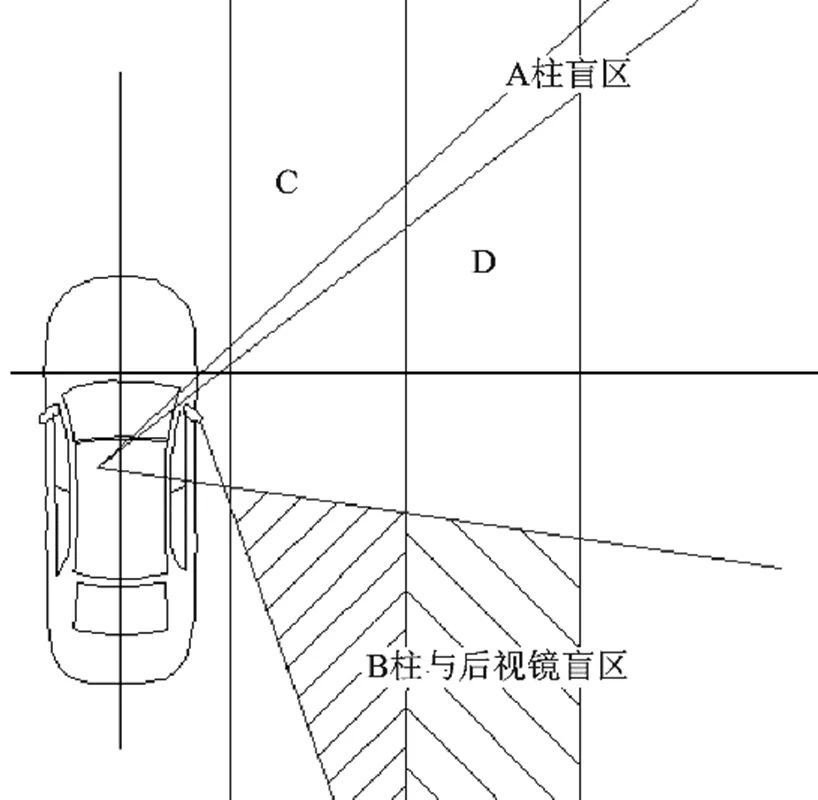
注:填充线区域为本研究的视野盲区。
为研究右转向过程中视野盲区与非机动车道关系,现在图1数据的基础上进行右转,每转10°采集一次数据,其过程如图2-图5所示。
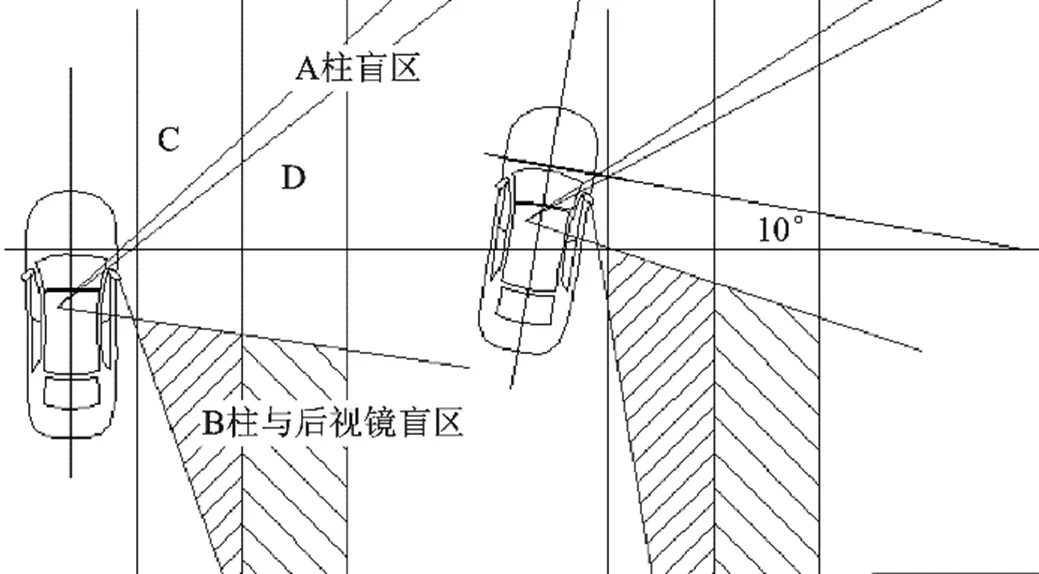
图2 0°和10°右转视野变化
由图2-图5可知,汽车右转时有两个特点:一是随着汽车右转,汽车与非机动车道的视野盲区范围逐渐变大,至转向结束,盲区基本保持;二是随着汽车右转角度增大,汽车单位时间内在非机动车道的探出速度不断增加,直至转向结束。
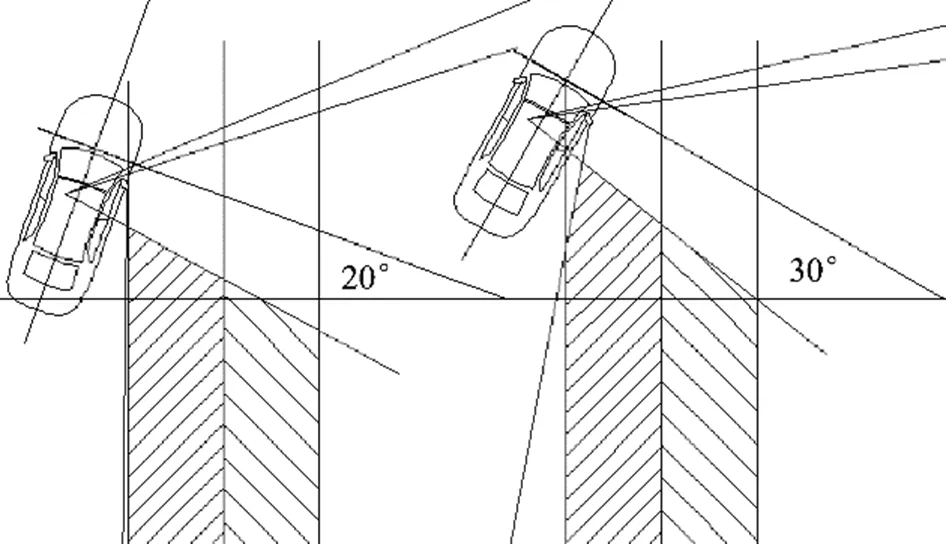
图3 20°和30°右转视野变化
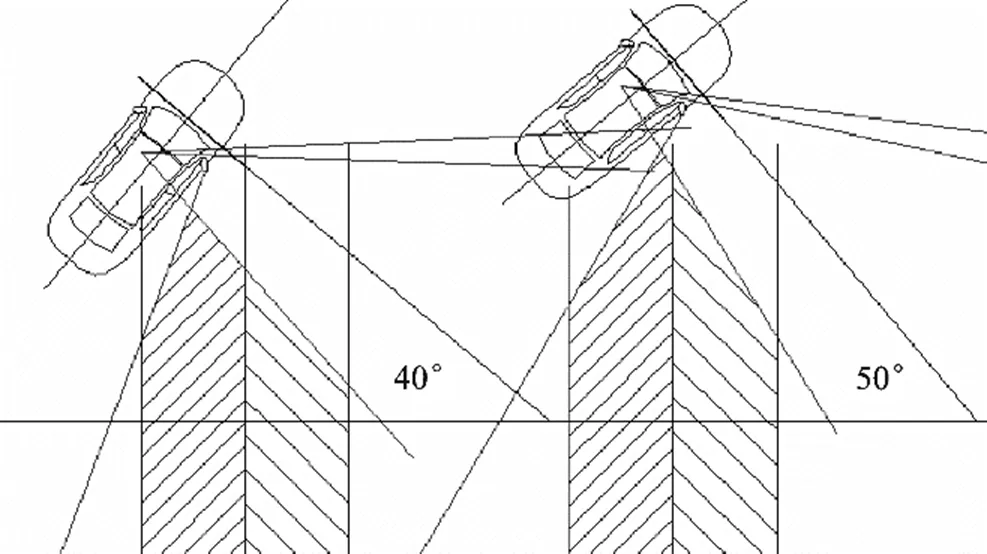
图4 40°和50°右转视野变化
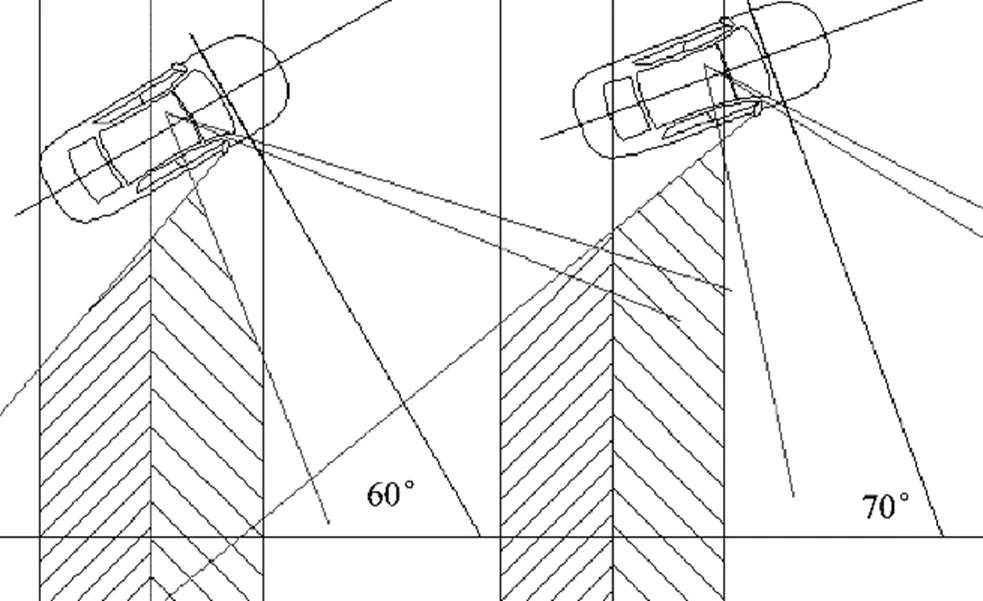
图5 60°和70°右转视野变化
若C车道是非机动车道,当汽车右转20°时,此时盲区最大,基本所有非机动车道来车都看不到。加之此时只有车头一小部分露出非机动车道,容易给非机动车辆驾驶员造成可以过去的错觉,因此,非常容易发生交通事故。当右转30°时,盲区依旧较大,但车身已占据半个非机动车道,相对来说较为安全。右转40°时,车身已占据全部非机动车道,基本不会发生交通事故。但因为运动需要时间,且右转汽车探出速度逐步加快,因此,在右转角20°时发生误判,至发生交通事故时可能已右转至30°或40°区间。
若D车道是非机动车道,右转至40°时,汽车车头才有一小部分探出,且此时已能看清离车辆较近的区域,但较远的区域看不到,因此,此时非常容易引发交通事故。右转50°时,车身已占据半个非机动车道,相对来说安全。右转60°时,车身已占据全部非机动车道,基本不会发生交通事故。同理,若在右转40°时发生误判,至发生交通事故时可能已右转至50°或60°区间。
2 右转辅助系统的组成部分
此系统采用测距传感器采集非机动车道行人及非机动车驾驶员的动态信息。通过短时间多次信息采集模拟行人及非机动车运动轨迹,然后与车辆位置进行比较,判断可能的碰撞时间及碰撞点。最后采取画面、声音等报警方式提醒驾驶员。
2.1 红外测距方法
国内对测距的种类和方法研究较多,尤其是红外测距传感器,其主要测距方法有脉冲式测距、相位差式测距、干涉式测距、三角式测距[5]。红外测距在具备被动测距[6](定位)的同时,又可以测量温度(分辨),近年在国内研究较多[7-10],技术较为成熟,故本文选红外测距。
2.2 红外传感器安装位置
为了确保在大多数情况都能采集到人员信息,红外传感器需一处有利的安装位置,从车辆的前后及高低两个维度来衡量,以便可以第一时间发现右侧行人及非机动车辆。传感器前后位置以靠前为最佳,可以第一时间测量数据;为应对有绿化带时的情况,传感器安装需要一定的离地高度。综合考量,在不改变车辆结构的情况下,安装在右侧后视镜下方,此位置比较靠前且有一定离地高度。
2.3 轨迹拟合
轨迹拟合分为右侧行人及非机动车运动轨迹,车辆运动轨迹两部分。对于右侧行人及非机动车来讲,通过短时间内多次信息采集就可以完成轨迹拟合;而车辆相对行人及非机动车运动轨迹[11],可以根据行人及非机动车相对车辆转动角度反向确定,在中控屏上显示符合人眼视觉的画面。
3 工作策略
3.1 控制方式
当右转向灯开启,或方向盘右转超过限定角度时,本系统开始工作,对右侧行人及非机动车进行检测并预警。
3.2 预警方式
根据行人及非机动车与车辆之间的轨迹、距离和行车速度,判断可能碰撞点及所需时间,显示在中控屏上,并加以警示(方法包括图像和声音)。
3.3 预警策略
碰撞预警分为距离大于10 m、大于5 m小于10 m和小于5 m三个阶段,系统工作及预警界面示意如图6所示。
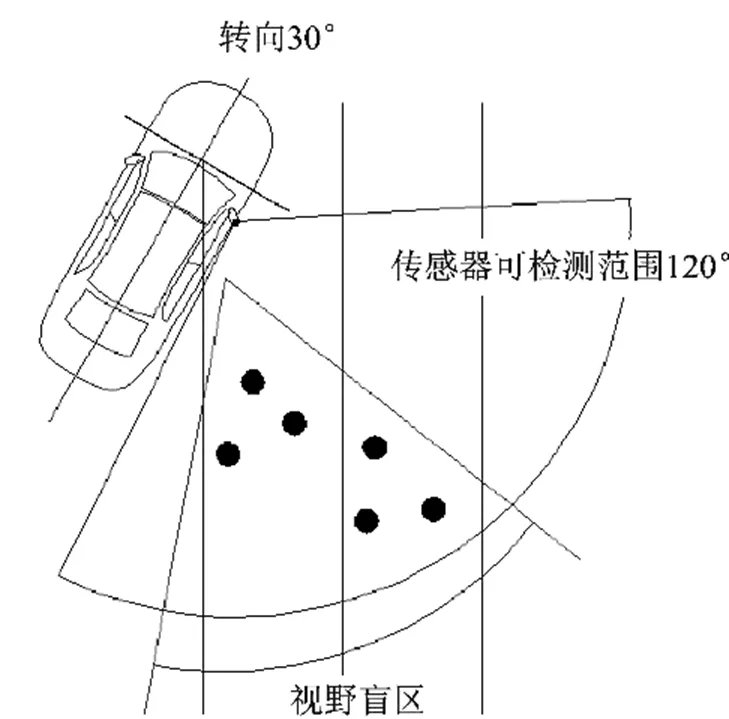
注:黑点代表行人或电动自行车,虚线内为盲区,虚线外为可视区域。
4 结论
本文通过分析汽车右转过程,发现在右转过程中,视野盲区基本保持,并在右转向20°/40°时容易对非机动车道产生误判,发生交通事故。针对这一潜在危险,提出利用红外测距传感器检测右侧行人及非机动车辆位置,同时确定传感器安装位置和控制策略,并将计算结果显示到车内显示器上,利用图像和声音对驾驶员进行提醒,从而避免交通事故。
[1] 国家统计局.2021年国民经济和社会发展统计公报[M].北京:中国统计出版社,2021.
[2] 杨硕.基于个性化驾驶员设计的线控汽车自动换道系统研究[D].长春:吉林大学,2020.
[3] 曾玮攀.基于人机共驾的转向辅助系统控制研究[D].长沙:湖南大学,2019.
[4] 边宁,赵保华,赖锋,等.基于高速公路的半自动驾驶辅助系统的开发与应用[J].汽车安全与节能学报, 2017(2):149-156.
[5] 彭伟.相位差式红外测距传感器的研究与设计[D].长沙:湖南师范大学,2017.
[6] 王少白,宋璐.红外双波段被动测距技术研究[J].河南科技,2023,42(6):14-17.
[7] 苏旭.具有距离自动修正的红外温度监测仪的研究与实现[D].呼和浩特:内蒙古大学,2017.
[8] 杨欣.人体红外测温系统设计[D].银川:宁夏大学, 2021.
[9] 周润.基于EIman神经网络的双波段红外目标被动测距方法研究与实现[D].西安:西安电子科技大学, 2021.
[10] 莫然.高精度红外测温系统设计[D].成都:电子科技大学,2020.
[11] 冯来春.基于引导域的参数化RRT无人驾驶车辆运动规划算法研究[D].合肥:中国科学技术大学,2017.
Design of Vehicle Right Turn Auxiliary System Based on Distance Sensor
HU Qinghui, SUN Qingwei, CHEN Yuanyong*, WANG Yujuan, GAO Yang
( Taishan Vocational and Technical College, Taian 271000, China )
In order to solve the problem of insufficient vision of the right non-motorized lane in the process of right turning, this paper proposes to install the ranging sensor in the front of the car to solve the problem. When the right turn signal is turned on, or the steering wheel turns right beyond the limit angle, the sensor starts to work, measure the position of the right pedestrian relative to the vehicle, forward speed, forward direction, and compare with the vehicle running track, calculate the possible collision time and collision point, and reflect on the center control screen to remind the driver to perform relevant operations. After research, it is found that when the vehicle turns to the right of 20°/40°, it is easy to misjudge the non-motorized lane. The system reminds the driver by image and sound to avoid traffic accidents.
Right turn auxiliary system;Distance sensor;Collision point;Collision time
U463.99
A
1671-7988(2023)20-26-04
10.16638/j.cnki.1671-7988.2023.020.006
胡庆辉(1986-),男,硕士,讲师,研究方向为汽车应用技术,E-mail:guyueguangda@126.com。
陈元勇(1972-),男,硕士,副教授,研究方向为汽车电控技术,E-mail:13561787822@163.com。
泰山职业技术学院2021年度科技和人文社科课题(2021KY04)。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
现代青年·精英版(2022年3期)2022-04-06
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
科学(2020年3期)2020-01-06
铁道通信信号(2018年12期)2019-01-31
资源再生(2017年4期)2017-06-15
电子制作(2017年7期)2017-06-05
汽车文摘(2015年11期)2015-12-02
中国卫生(2015年5期)2015-11-08
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01