
视野受限情况下行人疏散行为特征试验研究*
2023-11-07 13:43林华李张龙梅罗筱毓
中国安全生产科学技术 2023年10期
吴 鑫,林华李,张龙梅,朱 旭,罗筱毓
(1.四川师范大学 工学院,四川 成都 610101;2.四川师范大学 西南土地资源评价与监测教育部重点实验室,四川 成都 610066)
0 引言
在我国大型和超大型城市现代化建设过程中,各类公共场所和公共空间不断大型化、复杂化,而对于对紧急情况下的人员快速疏散造成严峻的挑战。因此,公共场所突发事件下人群疏散能力至关重要,是城市管理和危机处理的新兴课题之一。
目前,人员疏散研究主要采用观测、试验和模拟仿真等手段。现场观测一般通过监控录像等方式对某类特定场所(车站、商场等)人群运动进行数据采集,收集行人日常行为和紧急情况下的行为特点,由于观察者与被观察者之间没有信息交流,因此相关规律及数据更贴合实际情况[1]。相关研究表明:在不同场景中行人都呈现出特有的运动规律,包括分层现象[2]、分带现象[3]等。由于观测法是针对真实疏散行为开展研究,因此难以控制和展示单一变量对疏散行为的影响,而人群运动试验可以通过精确设置场景和控制变量来克服该局限。包括在教学楼开展低能见度下的疏散试验[4],探究能见度对个体疏散速度及路径选择的影响。考虑小群体行为的建筑疏散研究[5]。还有一些学者开展了行人相向行走或者合并过程的行为研究[6-7],人群中的自组织行为机制的试验研究[8],出口设置对疏散效率的影响以及激励作用下的人群疏散研究等[9-10]。此外,仿真模拟在近年来也得到长足发展,其中较为典型的是连续模型-社会力模型[11]和离散模型-元胞自动机模型,研究影响因素包括疏散标志、能见度、心理因素、动态出口选择等[12-15]。
目前针对视野受限情况下的人员疏散试验研究依然不多,且集中于行人疏散过程的宏观行为和仿真模拟[16]。因此,本文聚焦于视野受限条件下个体的疏散行为特性,以及群体在疏散过程中的典型行为。相关成果有助于进一步理解人群疏散过程行为特征,在公共安全和应急管理等领域有一定应用价值。
1 行人疏散试验
1.1 试验方案
以往研究大多都是从宏观角度出发,分析行人的疏散路径、疏散速度、疏散时间等物理量,而忽略了行人自身的微观动作(包括头部转动、瞬时速度等)以及行人在与环境(墙、出口)的相互作用下的特定动作。因此,在本文中,我们采用1个单人间的场景,志愿者们将在迷失方向的条件下以正常速度移动并寻找出口进行疏散。
设置1个5.4 m×5.4 m(长×宽)的正方形试验场地,通过支架和警戒线模拟边墙,在场地中心正上方8 m处设置1台高清摄像机,如图1所示。在场地角落处分别设置4个出口位置,每次试验将随机打开其中1个。试验共征集12名志愿者(8男4女),平均年龄约24岁,平均身高1.72 m,共进行试验12组(编号1~12)。为了真实模拟现场视野受限情况,试验人员将佩戴特制的棒球帽,该条件下,志愿者们能通过低头或者往下瞥,观察脚下的环境从而进行方位的判断,在此情景下,大致能看到脚前方约60 cm的地方,与1个成年人的臂长相当,符合行人在视野受限情况下会通过平举双手挥舞判断周遭环境该过程,同时也保障了试验人员的安全。

图1 标签设置示意Fig.1 Setting of experimental site
为获取志愿者在疏散过程中的行为数据,分别在棒球帽的帽檐、帽顶以及志愿者的左右肩上贴4个标签,有利于通过Tracker软件来跟踪人员运动和行为轨迹。
1.2 试验步骤
试验过程按照以下步骤开展:包括:志愿者进入到场地中心并在试验员的帮助下正确佩戴帽子并贴上标签;试验员将四个出口用警戒线关闭;志愿者原地转圈5周,与此同时,试验员打开其中1个出口;给出试验开始信号,志愿者需要尽快离开房间;志愿者移动并找到出口,离开房间,试验结束。
2 行人运动模型
视频采用30帧速率录制,即每间隔dt=0.033 s记录志愿者在场地的位置(头顶位置),对应每个志愿者i的轨迹Li如式(1)所示:
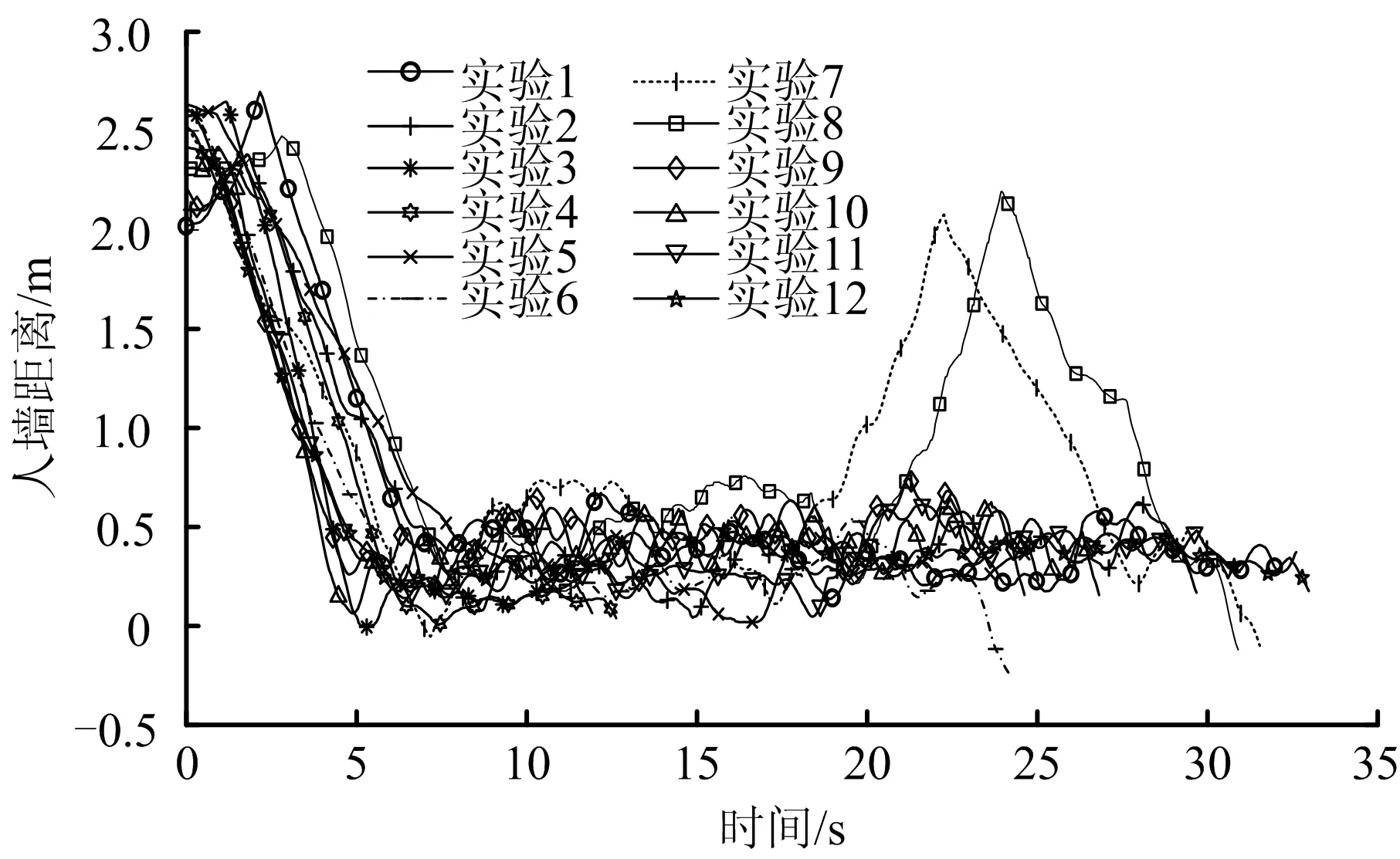
Li={Pi(0),Pi(1),…,Pi(K)|1 (1) 式中:N表示参与志愿者的个数,个;Pi(0)=(xi(0),yi(K0)),表示初始位置,定义为给定信号试验开始时志愿者i的地理位置;Pi(K)=(xi(K),yi(K))表示志愿者经过时间步K个时间后所处位置的坐标,K对应的是该人员走出出口这一帧的时间步数。 根据试验轨迹,我们可以计算出每个志愿者在每次试验中的疏散时间、行走速度以及头部转动角度。 疏散时间表示如式(2)所示: T=K×dt (2) 行走速度表示如式(3)所示: νi(k)=|Pi(k)-Pi(k-1)|∕dt (3) 式中:νi(k)为志愿者i在第k个时间步的行走速度;Pi(k)为志愿者i在第k个时间步的位置,其中0≤k≤K。 视线方向如图1所示。帽檐与帽顶2点间的连线可以确定志愿者i在第k个时间步视线的方向αi(k)如式(4)所示,两肩之间的连线可以确定身体的方向βi(k)如式(5)所示,头部转动角度如式(6)所示,δi(k)可根据αi(k)和βi(k)得出: (4) (5) δi(k)=αi(k)-βi(k) (6) 式中:yHi(k)是行人i在第k个时间步时,标签点H的y轴坐标,m;yPi(k)是行人i在第k个时间步时,标签点P的y轴坐标,m;xHi(k)是行人i在第k个时间步时,标签点H的x轴坐标,m;xPi(k)是行人i在第k个时间步时,标签点P的x轴坐标,m;yRi(k)是行人i在第k个时间步时,标签点R的y轴坐标,m;yLi(k)是行人i在第k个时间步时,标签点L的y轴坐标,m;xRi(k)是行人i在第k个时间步时,标签点R的x轴坐标,m;xLi(k)是行人i在第k个时间步时,标签点L的x轴坐标,m;αi(k)表示行人的视线方向,(°);βi(k)表示行人身体的方向,(°);δi(k)表示行人的头部转动角度,(°)。 上述方法从志愿者本身提取了相关数据,在整个试验过程中,人与环境还存在着相互作用力。考虑到这一点,将采用人-墙间距Si如式(7)所示: Si(k)=max (|xw|,|yw|)-max (|xi(k)|,|yi(k)|) (7) 式中:Si(k)为第i个人在第k个时间步时离墙最近的距离,值为正表示行人处于场地内,值为负则表示疏散人员已走出了场地;xw,yw为墙(边界)的横、纵坐标。 行人疏散路径及速度分布结果如图2所示。试验发现志愿者们在试验开始指令下达后,会朝着某一固定的方向径直向前走,抵达墙壁后会依据个人喜好随机选择方向(往左或往右),之后便沿着墙壁移动并寻找出口。整个试验过程中,志愿者们并没有出现掉头往回走的现象,即使是会绕远路,如试验1,这与紧急状况下行人迫切地寻找出口心理有关:往回走之前已经进行过判断的路是做无用功,在行人有“出口一定是和墙壁相连”这一定性思维的前提下,为了尽快寻找出口,信念较为坚定。行人在沿墙行走时还会与墙体保持一定距离,一方面是增大视野范围,提高自身判断出口的效率,另一方面则是减少与墙体的摩擦,提升行人的移动速度。 图2 部分疏散试验的轨迹及速度分布Fig.2 Trajectories and speed distribution of partial evacuation experiments 此外,在整个疏散过程中,志愿者的低速段是分布在起始点和墙角处,这是因为人员运动有1个起步阶段以及在墙角处会判断并决策这2个过程,因此行人的速度通常会慢下来。正常情况下行人的行进速度为1.03~1.28 m/s,男性速度略高于女性。表1是9位志愿者运动信息统计结果,平均疏散速度0.584 m/s,平均疏散时间24.78 s,这是由于在视野受限情况下行人会主动降低行进速度。 表1 疏散行人参数分析Table 1 Analysis of evacuation pedestrian parameters 为拟合速度曲线,每3帧(即0.1 s)取个平均速度,试验一速度拟合结果如图3~4所示。行人在运动过程中的速度变化与自身所处的场地位置密切相关,降速时间点是在墙角的位置出现。此外,行人的移动速度在是某一范围内浮动的。因此除开行人在墙角进行的判断过程后,将试验过程分为4个阶段。如图4所示,阶段1为寻找墙的阶段,阶段2~5为沿墙走阶段。 图3 试验1的速度拟合Fig.3 Speed fitting of experiment 1 图4 试验1的分段示意Fig.4 Schematic segmentation of experiment 1 对速度数据进行统计后得到如图5所示的箱线图。 图5 试验各阶段速度Fig.5 Speeds in each stage of experiment 行人在阶段1(寻找墙的阶段)的速度是低于后续的沿墙走阶段,原因是前一阶段的行人因为周围环境的不确定性所导致的试探心理,需要降低自己的疏散速度,从而获取足够的时间来判断周围环境是否安全。此外,我们还能观察到,所分阶段数目较多的(试验1、试验2、试验8、试验9)在后续沿墙走行为中,其速度都在稳定提升,由于一方面是经过前几个阶段,志愿者的疏散技能更为熟练,另一方面,疏散人员的心理从最开始的慌乱茫然中脱离出来,寻找出口的能力得到增强,动作迅速。 通过志愿者头顶和肩部的4个标签点,可以获得基于身体朝向的头部转动角度与瞬时速度图,如图6所示。图中每一份的角度为15°。由图6可知,在视野受限下的疏散中,人体头部的转动幅度并不大,视线与身体的夹角基本是处于75°~105°区域内的。其原因在于,紧急疏散情况下行人为了节省时间,会使自己的行为变得更简洁,在行进过程中不断确认周围环境,故而头部的摆动较小。 图6 头部转动角度与瞬时速度Fig.6 Head rotation angle and instantaneous speed 图6还显示出大部分行人头部朝向并没有在正前方,而是偏左或者偏右,具有一定的倾向性。在行人的整个疏散过程中,沿墙走这一行为占据了大部分时间。结合视频分析可发现,行人在沿墙走的时候,身体为了保持向前行进的一个状态,会下意识的将身体与墙保持1个垂直的角度,而头部的视线为了确认周围环境(此时主要是确定墙的状态)会将头部的朝向偏向墙面一侧,此时,视线与身体方向便存在一定夹角,具体偏向与顺逆时针行走方向以及个体差异有关。 此外,我们还做了基于地面为参考系的头部朝向图,如图7所示。结果表明,行人在视野受限情况下,整个疏散过程中头部的朝向转变不会太频繁,存在着几个主方向(占比很大),同时这几个方向也是墙的方向以及刚开始试验时头部的朝向。图7中,深色部分表示低速,占比较少且大多分布在西南、西北、东南、东北方向。浅色部分表示的是速度较快的情况,主要出现在沿墙走的过程中,这说明为了保证行动的有效性和人身安全,行人的疏散速度是处于谨慎的状态下表现出来的。 图7 部分试验的头部朝向玫瑰图Fig.7 Head orientation rose diagram of partial experiments 图8统计了志愿者们随着时间在整个疏散过程中的人-墙距离变化图,这个距离是指行人自身的位置到最近墙体的直线距离,数值小于0则代表行人走出了试验场地。由图8可知,行人在疏散指令下达后,人-墙距离会减小,少部分在初始时间会出现增加的现象,这是因为行人处于视野受限情况,并不清楚哪个方向是离墙最近的,符合现实情况。之后,人-墙距离将保持在0~0.5 m这一范围内,较集中于0.2~0.3 m这一范围值内,说明行人即使是在视野受限的紧急情况下,仍然会和墙壁保持一定的距离,这是为了保证自身的逃生速度以及安全。其中,试验7和试验8的后半部分出现了增大的特殊情况,这是因为该次试验的志愿者在疏散过程中决定远离墙壁,冒险去选择近道以提高效率。这展示了应急疏散过程中行人的风险偏好,当视线受限时,大多数人会选择安全可靠的行进路线,也有少部分人为迅速撤离而选择主观判断的行进路线,后者更偏好风险。 图8 人-墙间距变化Fig.8 Change of man-wall spacing 1)视野受限下行人疏散行为与正常情况不同,在周边无参照物时会随机选择某一方向径直走,遇到墙体后便以其为参考“沿墙走”,直到寻找到出口位置,也有少部分偏好风险的行人,为尽快撤离而选择远离墙体这一参照物去冒险寻找捷径。 2)试验过程行人的平均疏散速度为0.584 m/s,疏散时间为24.78 s。划分阶段后还发现,寻找墙阶段的行人速度慢于沿墙走阶段;遇墙角转弯及出口等需判断的情况速度也会明显降低;随着对环境的适应,疏散后期行人速度会相对提升。 3)对视野受限疏散过程中的行人头部转动特征研究发现,行人面部朝向与肩膀的夹角一般为90°±15°范围。在寻找墙阶段头部转向变化更大;而在沿墙走阶段,行人为锁定参照物并提高疏散效率,头部会习惯性偏向墙面一侧。2.1 个体指标
2.2 交互指标
3 试验结果分析
3.1 路径分析


3.2 速度分析






3.3 视线分析


3.4 人-墙距离分析
4 结论
猜你喜欢
基层中医药(2021年1期)2021-07-22
意林(2021年5期)2021-04-18
军事文摘(2020年22期)2021-01-04
中华民居(2020年3期)2020-07-24
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
天津医科大学学报(2015年2期)2015-12-22
科学家(2015年2期)2015-04-09
读者(2014年18期)2014-05-14
上海理工大学学报(2012年2期)2012-03-20
