
三维激光扫描技术在柱形建筑倾斜度测量中的应用
2023-11-06 06:57田绍泉
经纬天地 2023年4期
田绍泉
(唐钢国际工程技术有限公司,河北唐山 063000)
0 引言
柱形建筑是城市中常见的建筑形态之一,如灯塔、储罐仓库、碉堡楼以及城市一些异形地标建筑等。准确测量柱形建筑的倾斜度可以提供重要的结构信息,有助于及时发现和解决潜在的结构问题,确保建筑物的稳定性和安全性。目前常见的倾斜度测量方法主要有投点法、坐标测定法和垂准仪测量法,此类测量方法仅对建筑物上某些特征点或者特征部位测量,而建筑物由于施工工艺等因素的影响,使得从建筑物获取的单点坐标数据并不能完整代替建筑物整体观测结果[1]。

图1 常见柱形建筑
三维激光扫描技术具有精度高、扫描速度快以及自动化程度高等优点,随着三维激光扫描相关技术的不断成熟,为建筑物倾斜度测量提供了一种更新、更快、更便捷的测量作业方式。通过该技术对建筑物进行无接触扫描和预处理即可获得建筑物完整的点云数据,很好地弥补了传统测绘方法获取的单点数据进行倾斜度分析可信度偏低的局限性。本文制定了一种针对柱形建筑高斯点云拟合的建筑物倾斜监测数据处理方法,并以实际工程为例,应用三维激光扫描技术,采集建筑物点云数据进行倾斜量计算,最后将计算结果与传统监测倾斜量进行对比,研究结果表明该方法对建筑物倾斜监测具有较强的可行性和工程实际意义[2]。
1 常规测量方法分析
目前针对建筑物倾斜测量的主要方法有激光铅垂仪投测法、经纬仪测量法和全站仪测量法等。激光铅垂仪投测法原理是通过激光束使铅垂方向用作铅直定位测量,该方法测量精度高,但是施工方法复杂、专业化程度较高,并且人为操作偶然误差大,且在长距离投测时激光光斑会离散,精度会降低;经纬仪投测法操作相对简单,但是需要建筑物上有一条明显的墙角或者轴线用于测点布设的引导和参考,因此该测量方法局限性明显;全站仪免棱镜测量法是建筑物倾斜测量中应用最广、精度高、操作灵活的一种方法,但是要求被测物体上下部位均留有足够的人员操作及仪器和测量标注的安置平台,因此实际应用时受外界环境影响较大[3]。
2 相关理论基础
2.1 三维激光扫描理论基础
三维激光扫描仪测量作业时一般以自定义坐标系统为基准,其中,X轴在横向扫描面内,Y轴与横向扫描面内处于同一平面并与X轴垂直,Z轴与横向扫描面垂直。扫描仪工作时,首先发射器发出一个激光脉冲信号,内部控制系统旋转反射镜,当激光脉冲经过目标物的表面产生漫反射后,会沿着几乎同样的路线返回给接收端,内部计算系统通过脉冲发出和接收时间,得到目标点到相位中心距离S,再结合脉冲发出时扫描仪水平和竖直方向旋转角α、θ,最后通过坐标正算和校正获得P点坐标。三维激光扫描测量原理如图2 所示[4]。
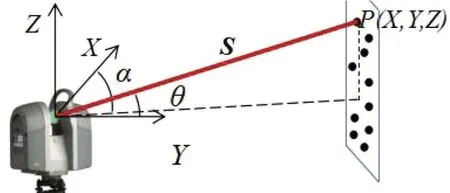
图2 三维激光扫描测量点坐标原理图
2.2 最小二乘平面拟合
高斯曲面拟合是指利用高斯函数对数据点集进行函数逼近的拟合方法,它是利用最小二乘原理求解,其原理是:设有一组数据(xi,yi)(i=1,2,3…),可用高斯函数描述[5],如式(1)所示:
式中:待定参数ymax、xmax和S分别为高斯曲线的峰值、峰值位置和半宽度信息。
考虑全部数据和测量误差ε,并以矩阵形式表示,如式(5)所示:
在不考虑测量误差e的影响,结合Inyi表达式,可以求出参数S、xmax、ymax,从而得到高斯函数yi的表达式。
拟合完成后分别求出中心线方向与X、Y轴方向的夹角。根据该倾斜角度,求出中心线在X、Y轴方向的倾斜量以及总倾斜量:
则可得到倾斜度θ,如式(6)所示:
式中:H为待测目标的高度,S1、S2分别为在X轴和Y轴方向的倾斜量;S为总倾斜量;a1和a2为待测目标中心线分别与X轴和Y轴方向的夹角。倾斜量计算示意图如图3所示。
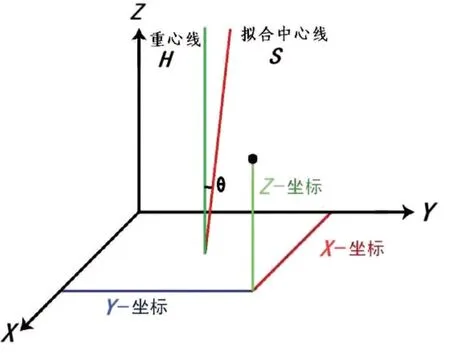
图3 倾斜量计算示意图
3 测区概况及点云数据处理
3.1 测区概况
待测目标为某临海灯塔,整体呈柱形构造,高约23 m,直径约10 m,周围以礁石为主,整体环境较为复杂。由于建筑物建造时间较长,受周围地质及海边台风影响,现需对建筑物稳定性进行监测,以便为管理部门提供完整、可靠的数据基础,若形变度超过相关规范,需提前做好预警和支护工作。由于传统测量手段测量施工难度较大,因此,采用三维激光扫描技术进行整体倾斜度测量工作。
本文基于三维激光扫描技术进行建筑物倾斜度分析,主要包括外业数据采集、内业点云数据预处理和建筑物倾斜度分析三部分。外业数据采集主要包括扫描线路设计、靶标布设、扫描参数设置和目标物点云数据采集;点云数据预处理主要包括点云配准和点云滤波;建筑物倾斜度分析主要包括建筑物高斯曲面拟合、轴线提取以及偏移量计算等。
3.2 外业数据采集及预处理
针对测区环境复杂的情况,建筑物外业测量前,首先需要进行现场踏勘。为减少不必要的补测、重复观测以及数据解算时的累积误差,在线路规划时尽可能返回起始点,形成环路。
由于建筑物高约23 m,顶部易产生盲区,因此外业数据采集可采用“远近结合”的方式。待扫描路线设计完成后,布设一定数量的靶标球,其目的是方便内业数据拼接和坐标转换,可有效提高测站拼接精度以及实现坐标转换。待以上工作准备完成后进行仪器架设,外业技术人员设置好扫描参数进行扫描作业。由于本次数据采集的主要目标是墙体点云数据,因此,整体数据采集完成后,可再选定墙体区域重点盲区进行点云数据采集[6]。
内业预处理主要包括点云配准、点云滤波、点云精简。点云配准是将不同视角获取的点云数据进行拼接,获得统一视角的点云数据;点云去噪是将偏离主体的漂移点和超出扫描区域的多余点进行剔除,避免对灯塔拟合时干扰精度。点云精简是根据目标点云特点,对点云数据进行压缩,减小计算机负荷,方便数据分析,由于本实验外业数据采集时选择点云密度较小的采集方式,因此,不对点云数据进行精简处理。预处理后的灯塔点云数据如图4所示。
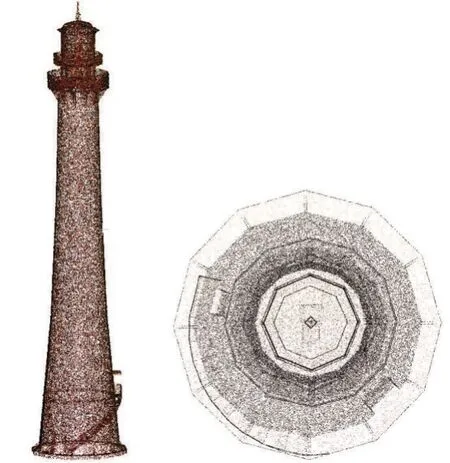
图4 预处理后的灯塔点云数据
4 建筑物倾斜监测分析
将待测目标点云进行预处理后,建立K-Tree 再采用高斯曲面拟合方法拟合待测建筑物,即可得到建筑物的中心轴线。为方便对建筑物进行倾斜分析,以建筑物中心线与该水平面的交点为原点,过原点且垂直于该水平面的方向为Z轴,原点与水平面边线中点的连线为X轴建立独立坐标系,如图5所示。
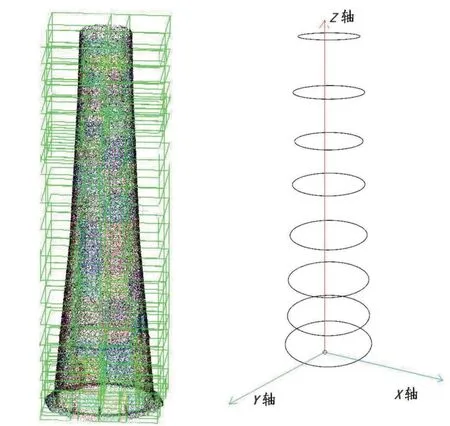
图5 中心轴线拟合及坐标系建立
建立独立坐标系后,然后提取各层不同高度建筑物重心并进行连接即可得到目标灯塔的中心轴线,再以第1 层建筑重心为原点重新建立Z轴线,如图6 所示,由于建筑物发生倾斜变形,中心轴线和Z轴线不在同一直线上。按照倾斜度计算公式,最大倾斜量在建筑物顶部位置,得到待测目标倾斜度为0.21°,最大倾斜量约为8.43 cm。
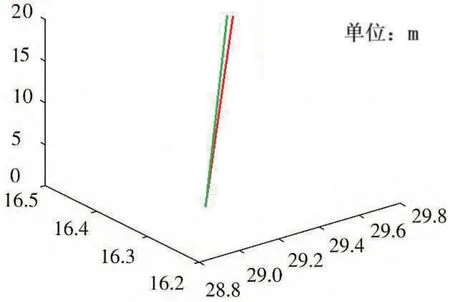
图6 建筑物整体倾斜度分析结果
为验证该方法结果的可靠性,利用全站仪对同一建筑物进行倾斜度测量,通过测水平角法,在每测站直接观测顶部观测点与底部观测点之间的夹角或上层观测点与下层观测点之间的夹角,以所测角值与距离值计算整体水平位移分量和位移方向,计算出建筑物上部中心相对于底部基础中心的位移。全站仪外业采集到内业处理约花费1.5 d,三维激光扫描仪外业采集不到3 h,内业处理花费0.5 d,效率上优势明显。通过全站仪测得的建筑物最大偏移量为7.95 cm,倾斜量较差为4.8 mm,相对误差为6.04%,相对误差小于10%接近5%,因此,三维激光扫描法能够满足一般建筑物倾斜量观测精度要求。
5 结语
综上所述,建筑物的倾斜变形监测是一项复杂而又精细的工作,在现代建筑施工中,利用先进的科技和装备对建筑物倾斜度进行测量处理,可以节约大量的人力、物力,从而达到高精度、高效率的双重效果。本文基于三维激光扫描技术采集柱状建筑物点云数据,并进行倾斜度计算分析,最后与常规全站仪测量的结果进行对比。研究结果对于评估建筑结构的稳定性和安全性,以及进行城市规划和建筑维护具有重要意义。
猜你喜欢
西部交通科技(2021年9期)2021-01-11
口腔颌面修复学杂志(2020年5期)2021-01-06
工程与建设(2019年3期)2019-10-10
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
电测与仪表(2016年9期)2016-04-12
中国房地产业(2016年2期)2016-03-01
体育科研(2015年1期)2015-07-21
河南科技(2014年22期)2014-02-27
河南科技(2014年5期)2014-02-27
