基于STM32的气垫悬浮车系统设计
2023-11-06 09:38邱萌萌刘瑞徐林陈俊
电脑知识与技术 2023年25期
邱萌萌,刘瑞,徐林,陈俊
(安徽机电职业技术学院电气工程学院,安徽芜湖 241000)
0 引言
随着现代装备制造业的日益发展,尤其是航天、船舶、电子、运输业的不断进步,装备制造行业对气垫承载系统的需求显得格外重要,本文设计并制作完成具有悬浮技术的可寻迹气垫悬浮车,对电动小车可实现悬浮移动、超声波避障、语音模块等功能。
1 气垫悬浮车硬件设计
1.1 系统的整体设计
本系统主要由STM32F103ZE 单片机、语音模块、路面引导模块、避障模块、电机驱动模块、高速轴流风机、高速轴流风机(气垫效应)、电源模块等组成。气垫悬浮车系统框图如图1所示。
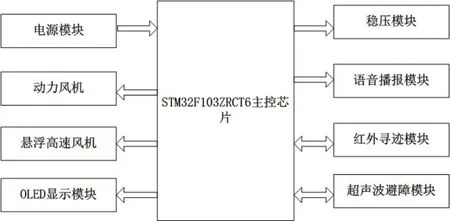
图1 气垫悬浮车系统框图
1.2 气垫悬浮车系统硬件模块的选定
1.2.1 主控制器模块
方案一:主控采用STM32F103ZET6 单片机。优点:除了新增功能增强外设接口外,STM32互联络列还提供与其他STM32单片机相同的规范接口[1]。这种外围通用性提高了整个产品系列的应用灵敏性,使开发人员能够在多个设计中反复使用相同的软件。新STM32 的规范外设包括10 个定时器、两个12 位1-msample/s 模数转换器(交织模式下2-msample/s)、两个12 位模数转换器、两个I2C 接口、5 个USART 接口和三个SPI 端口。新产品的外设有12个DMA通道和一个CRC 计算单元。与其他STM32 微控制器一样,它支持96 位唯一识别码。缺点:STM32 是运行指令的,合适运行算法,但对于多路信号处理,需要很多DSP进行并行处理。
方案二:主控采用K210。优点:1) 乘除法指令,给单片机开发者的编程工作带来了很大的便利。很多的8位单片机并不具备乘法相应功能,如需作乘法功能,还需要编辑出一段调用程序,非常不便。2)在RAM区域中能够开辟一个双重功能的地址区间,能够灵活使用,给单片机开发工程师带来了极大的便利。3) 操作系统是一整套完整的软硬件组合,又称作为“位处理器”。处理的对象是位而不是字节,能够对单片机内部的寄存器中的传送、测试、清零、位置等数据进行处理,且还具备对位的逻辑运算功能。缺点:需要增加外围功能,例AD/EEPROM/PWM 等扩展功能,会增加硬件与软件的开发难度;I/O 口在高电平时无法输出。
结合考虑功耗、精度等因素,本系统采用方案一。最小系统图如图2所示。

图2 STM32F103ZET6 最小系统原理图
1.2.2 语音模块
方案一:LU—asr01。优点:1) 10 米超远距离唤醒。2)98%超高识别率。3)最多自定义5个唤醒词,100个识别词。4)一键烧录功能,无需任何下载器,一根USB线直接烧录。5)自带3W 功放,可外接4Ω/3W扬声器。缺点:需要制作平台,需要不断地调试[2]。
方案二:JR6001 语音播放模块优点:自带USB 接口,能够灵活地更换SPI内的语音形式,相对传统芯片无需连接上位机更替语音。缺点:需要成熟的指令及职业的配套上位机[3]。
综合考虑两种方案的优缺点,选择方案一,LU—asr01实物图如图3所示。

图3 LU—asr01 实物图
1.2.3 寻迹模块
方案一:TCRT5000红外寻迹。优点:只用于接收信号,较小的功耗,性价比很高。缺点:1)易受不同热源和太阳光源干扰。2)容易被其他信号源干扰。3)器件灵敏度会受到环境温度影响,较差的环境可能会出现失灵状况[4]。
方案二:PID 摄像头寻迹模块。优点:作用距离远,检测精度高,范围广,可靠性好,基本不会出现检测不到轨迹的状态。缺点:抗干扰能力弱,易被光源干扰,采集数据较大,需要占有MCU的大量资源。
综合考虑循迹的性价比、重量等,采用方案一。电路图如图4所示。
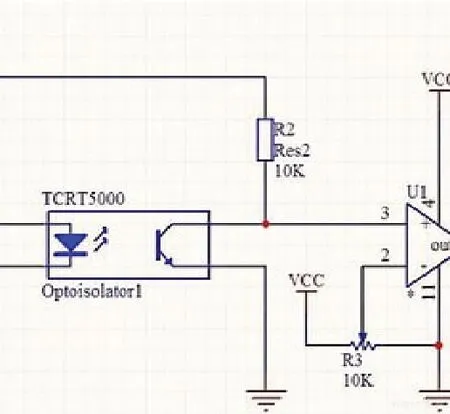
图4 TCRT5000电路图
1.2.4 避障模块
方案一:HC—SR04超声波模块。优点:通过超声波实现距离检测,检测频率高,方向性好,尤其对固体、液体检测灵敏度高,穿透能力强[5]。
缺点:超声波传感器易受其他接近频率的影响,但其他机器也会发出这样的频率噪声,引起传感器接收到错误的信号。且多个超声波传感器之间的发射和接收信号会相互交叉干扰。
方案二:DADISICK激光避障模块。优点:激光雷达具有分辨率高、隐蔽性好等优势。其工作原理是向目标物体发送探测信号(激光束),将目标发射回来的信号(目标回波)与发射信号进行比较,进行相关处理并获取目标的准确信息(目标距离、方位、高度及速度等参数),从而对目标进行探测、识别等。缺点:成本太高,检测时忽略远处的小物体,存在识别盲区。
综合考虑采用方案一,更适合本设计的选用。超声波避障原理如图5所示。

图5 HC—SR04超声波避障原理图
1.2.5 高速轴流风机(动力风机)
方案一:CZ3457 高速轴流风机优点:它是经过涡轮型的散框多荆条改变风方向,同时这个荆条是弧形状的,经过软件设计模拟,使风扇的风呈螺旋式的吹出,从而达到了方向成直线,它的特点是负压大,吹得远。缺点:负压大,吹得远,但是噪声、功率大一些[6]。
方案二:步进电机优点:应用简单,无需调试参数,性价比高。
缺点:有矩频特性,运行速度不能太高,开环控制,出现丢步时无法及时检测。
综合考虑采用方案一,能够提供足够的动力使车体悬浮。高速轴流风机实物图如图6所示。

图6 CZ3457高速轴流风机实物图
1.2.6 高速轴流风机(气垫效应)
方案一:AFB1224SHE 台达轴流风机,优点:体积小,内部风叶可改变角度,用于降低负荷。缺点:风压不高,内部风叶角度的改变较为复杂,维护复杂,相对工作效率不高。实物图如图7所示。

图7 AFB1224SHE台达轴流风机实物图
方案二:泰阳直流风机
优点:具有高智能、高节能、高效率、寿命长、振动小、噪声低以及可连续不间断工作等特点,损耗小效率高。低音运转、安静无尘,EC风机在降噪方面具有明显优势,相比普通风机,带来洁净的同时无噪声困扰。缺点:EC风机制造比较贵、后期维护复杂。
综合考虑采用方案一,可带来足够的动力。
1.2.7 电池模块
方案一:普通锂电池。优点:锂电池电压高,能量比比较高具有高储存能量密度;重量轻,高低温适应性强;绿色环保。缺点:锂电池均存在安全性差,有发生爆炸的危险;锂电池均需保护线路,防止电池被过充过放电。由于有Type-C接口可采用移动电源供电。
方案二:航模锂电池。优点:我们选用的电池有高达2200ma的容量,安全性能良好;重量轻;大容量;更好的放电特性。
综合考虑采用方案二。
1.2.8 直流调压器模块
方案一:8XL4016EL 直流调压器模块。优点:具有多种电压、电流控制模式,不仅可以自动控制,而且具备手动调节控制,输出电压线性可调,精度高,抗干扰能力很强。缺点:体积大,笨重且效率较低。
方案二:XL6019可调升压电源模块。优点:小体积高可靠性输出稳定化,精度±3%,高性能价格比,内置多个输入输出电压,输入滤波器,低电磁兼容特性。缺点:输出调节精度低,电感值过小,存储能量不足,导致电压升不上去,电感值过大,导致负载响应速度变慢,因此,电感需要选择合适的值。
综合考虑采用方案一,符合输出调节高精度要求。直流调压器模块电路图如图8所示。

图8 8×l4016e1直流调压器模块电路图
1.2.9 电机驱动模块
方案一:L298N 电机驱动模块。优点:工作电压高、输出电流大、驱动能力强、发热量低、抗干扰能力强。缺点:发热量比较大。
方案二:TBB6612FNG 电机驱动模块。优点:具有高效的电流控制能力,可以实现高速和高精度的电机控制;具有过热保护和过流保护功能,可以保护电机和驱动器的安全;具有多种控制模式,可以满足不同应用场景的需求。缺点:输出电流有限不能控制大功率电机。需要外部电源供电,增加了电路设计的复杂度,需要一些软件编程。
综合考虑采用方案一,上手简单性价比高。L298N电机驱动模块实物图如图9所示。

图9 L298N电机驱动模块实物图
2 软件设计
2.1 程序功能描述
功能描述:
1) 在图10 所示测试赛道上不摆放障碍物,将气垫悬浮车放在启/停点上一键启动后,气垫悬浮车能在启/停点缓慢升起,悬浮高度大于2mm,悬停时间大于2s。2) 气垫悬浮车由启/停点出发,沿测试赛道逆时针方向完成寻迹运行一周后,停在启/停点上。要求运行时间小于180s,超时停止测试。3)完成气垫悬浮车在标识线A与标识线B之间往返运行控制,气垫悬浮车由A点沿测试赛道逆时针方向出发,到达B后返回到A,再由A折返到B,最终停在启/停点上。要求运行时间小于120s,超时停止测试。

图10 赛道图
2.2 程序流程图
气垫悬浮车控制系统由12V的航模锂电池供电,由于使用过程中电池电压衰减,因此加了升压模块稳定输出12V,系统一上电,单片机和高速轴流风机(气垫悬浮)同时得电,同时单片机上电后,对应的语音模块、红外扫描寻迹模块、OLED 显示模块、超声避障模块等得电工作,红外传感器扫描赛道获取信号值,单片机经计算处理开始寻迹功能,超声避障模块启动同时实时监控前方是否有障碍物,从而进行避障功能;在寻迹过程实时状态,由OLED屏进行显示,并通过语音模块进行播报。其流程图如图11所示。

图11 程序设计流程图
2.3 程序设计
系统部分功能程序设计如图12所示。

图12 程序设计
3 测试方案与测试结果
3.1 测试方案
1)硬件测试
将焊接好的电路,使用学生电源,精密万用表,函数发生器示波器等工具先分别单独测试模块功能,达到效果以后,再连接各个模块进行调试。
2)软件仿真测试
使用NI Multism14.0,绘制系统的电路图,并且进行仿真。
3)硬件软件联调
把系统控制程序烧录到STM32F103ZE 单片机中,再在结合硬件测试部分操作检查测试结果是否达到题目要求。
3.2 测试结果及分析
3.2.1 测试结果(数据)
进行测试结果如表1所示。

表1 测试结果
3.2.2 测试分析与结论
根据上述测试数据,能做到在设定时间内可完成悬浮高度及避障要求,由此可以得出以下结论:
1)能够实现悬浮效果。
2)运行时间在范围内。
3)折返跑不超过设计要求。
综上所述,本设计达到设计要求,具有较好的应用价值。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
燃气涡轮试验与研究(2021年4期)2022-01-18
初中生学习指导·中考版(2020年10期)2020-09-10
江苏教育(2020年5期)2020-04-26
数理化解题研究(2018年8期)2018-04-21
中国交通信息化(2016年6期)2016-06-06
装备环境工程(2015年4期)2015-02-28
河南科技(2014年5期)2014-02-27