
基于双十表光学捷联惯组的主从冗余方法及信息重构技术
2023-11-06 09:03:06柴嘉薪施国兴
导弹与航天运载技术 2023年4期
柴嘉薪,王 聪,施国兴,王 辉
(北京航天自动控制研究所,北京,100854)
0 引 言
在运载火箭执行任务过程中,惯性器件作为控制系统的关键单机,可能因自身质量问题或受到外部环境的影响发生故障,直接影响任务成败。
提升惯组的可靠性,可从提升单一元部件的可靠性入手,但受生产工艺水平等因素限制,此项研究投入大、周期长、见效慢,提升空间有限[1],且无法完全避免未知的外部环境因素对惯性器件性能造成的不良影响。传统的运载火箭设计中通常采用惯组冗余技术,以大幅度提高运载火箭控制系统的可靠性[2]。
对于重大工程任务,须遵循“一度故障正常飞行,二度故障保证安全”的设计原则,中国工程实践中现有可满足此项原则的方案仅有双七表挠性惯组冗余方案[3]。随着光学陀螺技术的发展,成熟度逐步提高,光学陀螺因其测量精度高、灵敏度高、动态范围大、体积小、重量轻、易于集成的优点,已成为航天应用的主流,目前航天主流运载火箭除中国的载人运载火箭外,均无机械陀螺构成的惯组,已全部更新换代为光学陀螺惯组[4-5],因此不再考虑沿用此成熟方案。
十表光学惯组可组成成本较低、节约空间、质量较轻且冗余度更高的惯组冗余配置。现已有成熟的单十表光学惯组冗余方案[6]经过了多型运载火箭飞行试验验证,该方案可实现惯组在一度故障下正常工作,但会损失一定的导航精度,对于重型运载火箭的长时间飞行任务,无法保证一度故障下的高精度入轨。部分文献中研究了斜置表与正交轴相对角度的最优化配置设计,以提高单十表惯组配置下斜表导航的精度[7-8]。但受方案冗余度和斜置表性能的限制,单十表光学惯组冗余方案仍有较大局限性。
针对以上问题,本文研究了一种基于双十表光学捷联惯组的主从冗余方法及信息重构技术。依据在主/从单套惯组内分别对五表陀螺仪和五表加速度计进行故障诊断和进一步通过主从惯组之间一致性判别策略实现故障定位的结果,完成异常表的故障计数和故障表信息的隔离。通过冗余信息重构技术,重型运载火箭在长时间飞行过程中,惯组的同类表发生三度以下故障后,控制系统仍能通过系统级冗余得到可靠有效的惯性导航信息。
1 基于双十表光学捷联惯组的主从冗余方法
1.1 双十表光学捷联惯组的组成
双十表光学捷联惯组配置了双五表陀螺仪和双五表加速度计,其组成如图1 所示。在箭体坐标系OX1Y1Z1下,定义Ax、Ay、Az为3个正交安装的石英加速度计;AS和AT为两个斜置安装的石英加速度计;GX、GY、GZ为3个正交安装的光学陀螺仪,GS和GT为两个斜置安装的光学陀螺仪,图中箭头指向即为对应表的敏感轴向。两套惯组中斜表轴向与正交轴之间的定向夹角一致,其中OS轴与三正交轴之间的夹角分别为αS、βS、γS,OT轴与三正交轴之间的夹角分别为αT、βT、γT。

图1 双十表光学捷联惯组的组成及安装定向示意Fig.1 Composition and installation orientation of double tensensor optical strapdown inertial unit
在不考虑两套惯组之间的安装误差及摆放不水平度差异的理想情况下,主惯组与从惯组对应轴向陀螺仪/加速度计的测量信息是一致的。除了主从惯组之间的测量信息比对外,每套惯组同类表中两个斜置表与3 个正交表输出的测量增量值另有投影关系如下(此处以陀螺仪输出为例,加速度计输出同理):
式 中δθαi为 各 轴 陀 螺 仪 输 出 的 角 速 度,α=x、y、z、s、t;Esi_x,Esi_y,Esi_z分别为GS表在各正交轴的投影系数;Eti_x、Eti_y、Eti_z分别为GT表在各正交轴的投影系数;i= 1、2,分别为主惯组和从惯组。
1.2 冗余信息处理方案
双十表光学惯组冗余信息处理采用主从冗余方案。首先,在主惯组和从惯组内分别进行单套惯组内五表陀螺仪/五表加速度计的故障诊断与故障隔离。对于单套惯组内出现同类表二度及二度以上一致性故障的情况,再进行主从惯组之间的一致性故障检测,以判定故障惯组各正交表是否损坏。利用隔离故障表后的冗余测量信息进行冗余信息重构与导航计算,分别通过主、从惯组五表陀螺仪/五表加速度计测量信息得到角增量信息和视速度增量信息。最终根据故障定位结果和冗余信息使用真值表,从主惯组或从惯组中择优选取角增量/视速度增量信息用于导航控制。
惯性器件的故障模式多且机理复杂,但从惯组冗余信息使用的角度来说,主要关注惯性器件的输出特性是否正常,双十表惯组冗余信息处理流程见图2。

图2 双十表光学惯组冗余信息处理流程Fig.2 Redundant information processing flow of double tensensor optical strapdown inertial unit
单套惯组内故障诊断措施主要包括陀螺仪/加速度计脉冲常零值输出判别、角速度/视加速度极大值判别、视加速度/角速度/角度一致性判别。其中,常零值输出判别与极大值判别的方法简单、明确且成熟,可直接沿用现有方法[9],但需根据任务特点和惯性器件技术指标谨慎设计故障判别和故障隔离的门限。
针对陀螺仪测量信息和加速度计测量信息的非零值故障和非极大值故障,采用正交轴与斜表在正交轴投影共判、短周期与长周期相结合的方式,将一度故障直接定位到故障单表或诊断出二度故障,并根据故障判别和定位结果分情况进行后续的故障隔离和冗余信息使用。
2 单套惯组内一致性故障判别方法
以陀螺仪输出信息为例,介绍一种双五表配置下的一致性故障判别方法。
2.1 一致性判别方程
针对单套惯组内同类表的一致性故障判别,以陀螺仪输出的角速度信息为例,建立如下一致性判别方程:

式中δθαi0为陀螺仪输出的角速度;εGiα为故障门限值;α=x、y、z、s、t;i= 1、2,分别为主惯组和从惯组;Δt为滚动累加周期,为降低高频干扰信号对故障判别的影响,对角速度一致性判别进行滚动累加,本文取滚动累加周期Δt为控制周期的25倍。
2.2 各单套惯组内五表陀螺仪一致性故障判别
在单套惯组内,利用建立的一致性判别方程,对五表陀螺仪分别进行故障表一致性检测,并执行故障表隔离操作。分别判断主惯组和从惯组内是否存在五表陀螺仪出现一度故障或二度故障的情况。主、从惯表故障定位见表1、表2。

表1 主惯组五表陀螺仪输出信息一致性故障定位Tab.1 Consistency fault location of gyroscope output information from main strapdown inertial unit

表2 从惯组五表陀螺仪输出信息一致故障定位Tab.2 Consistency fault location of gyroscope output information from slave strapdown inertial unit
设单套惯组的一致性故障标志字N主/N从,用以表示单套惯组内部一致性故障判别的结果:
结合表1 和表2 单套惯组内五表陀螺仪输出信息一致性故障的定位结果,可得到主、从惯组的故障标志字见表3。

表3 单套惯组内一致性故障判别结果Tab.3 Consistent fault discrimination results in a single strapdown inertial unit
2.3 各单套惯组内五表加速度计一致性故障判别
单套惯组内五表加速度计一致性故障判别方法与五表陀螺仪类似,不同之处在于,对五表陀螺仪的一致性故障判别采用了短周期累加和长周期累加相结合的方式。但对于五表加速度计一致性故障的判别,考虑到在飞行状态下火箭轴向过载与横法向过载差异很大,轴向过载在横法向投影,不同惯组之间的安装误差会导致横法向表输出有差异,长时间累计下来对单表输出影响很大。若随之放大故障判别门限将使判别失去意义,因此五表加速度计采用短周期累加和中等周期累加相结合的一致性故障判别方式。
3 主从惯组之间一致性故障判别
针对第2 节中通过式(3)~(12)判断出主惯组和从惯组中有一个惯组出现同类表二度故障,且另一套惯组无故障的情况,需要进一步通过主从惯组之间一致性故障判别确定发生一度以上的惯组的正交表是否出现故障。
3.1 一致性判别方程
针对主从惯组之间的一致性故障判别,以陀螺仪输出的角速度信息为例,建立如下一致性判别方程:
式中δθαi0为陀螺仪输出的角速度;εGiα为故障门限值;α=x,y,z,s,t;i= 1、2,分别为主惯组和从惯组;Δt为滚动累加周期。
3.2 双五表陀螺仪一致性故障判别
针对第2.2 节中判断出主惯组和从惯组中有一个惯组出现同类表二度故障,且另一套惯组无故障的情况,利用式(14)~(16)进一步判别出现二度及二度以上故障的惯组中3个正交表是否为故障表,诊断结果用于后续的冗余信息重构。
针对第2.2 节中判断出一套惯组为二度及二度以上故障,另一套惯组为一度故障或二度及二度以上故障的情况,属于系统三度或三度以上故障,考虑控制系统的工程需求与复杂性,不再针对此类情况作进一步故障表判别处理。
同类表二度及二度以上惯组正交表故障判别真值见表4。
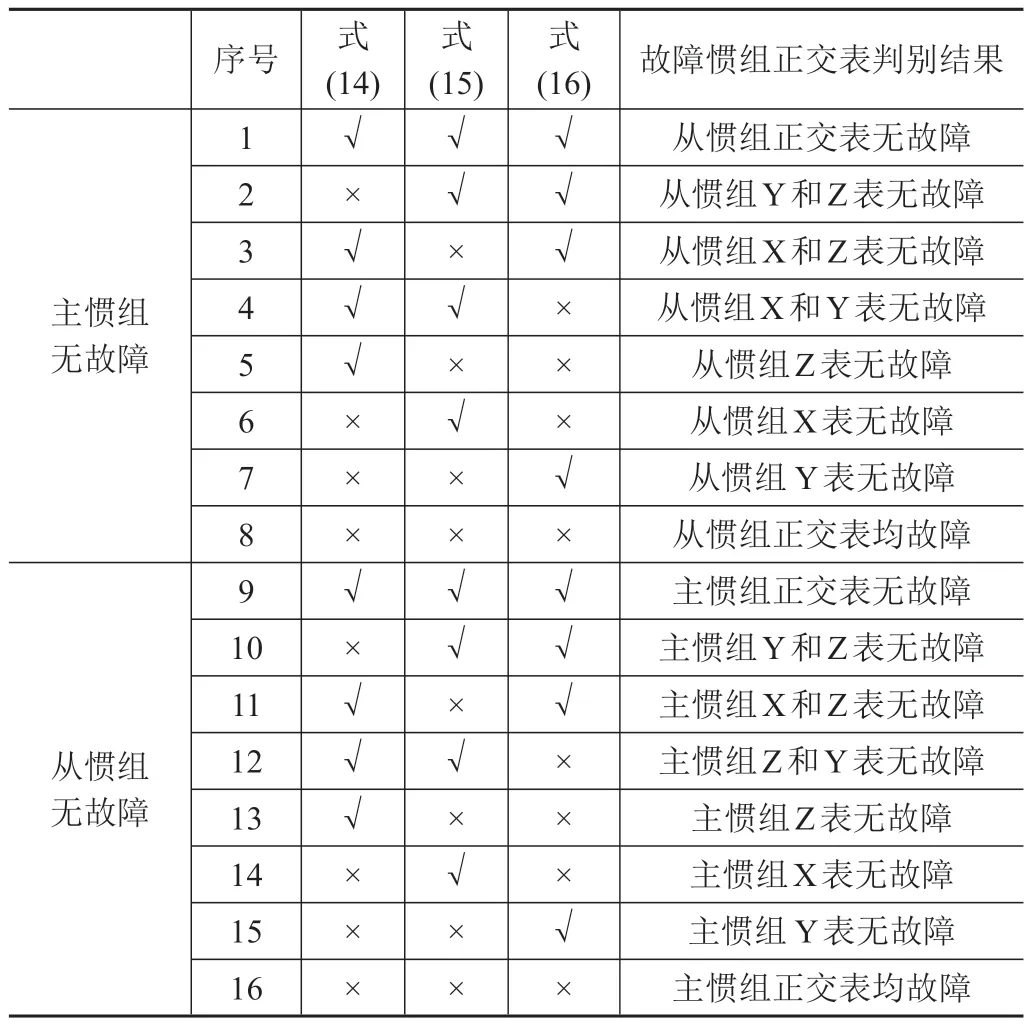
表4 故障惯组中正交表故障判别Tab.4 Fault discrimination of orthogonal axis sensors in fault strapdown inertial unit
根据表4单套惯组之间正交表故障判别结果,得到主、从惯组故障标志字见表5。

表5 两套捷联惯组之间一致性故障判别结果Tab.5 Consistent fault discrimination results between two strapdown inertial units
3.3 双五表加速度计一致性故障判别
与双五表陀螺仪类似,双五表加速度计经过故障判别与故障隔离,在主惯组和从惯组内分别利用各自的无故障三正交加速度计测量信息或冗余信息重构结果进行导航解算得到视速度增量,待系统进行冗余信息的选用。
4 冗余信息重构
4.1 冗余信息重构流程
通过冗余信息故障诊断,得到当前五表陀螺仪/加速度计输出的测量信息的健康状态,基于此,开展单惯组内同类表冗余信息的重构与导航解算。具体流程如图3所示。

图3 冗余信息重构流程Fig.3 Redundant information reconstruction process
如图3所示,对于在当前控制周期内未达到三度故障切除的五表陀螺仪/加速度计,依次进行是否有故障计数、是否有正交表异常计数或正交表故障、是否有两个正交表异常计数或故障、是否有斜置表异常计数或故障等判断。针对各步骤判断结果,依据冗余信息重构流程,利用相应的测量信息进行导航解算或信息重构。
惯组选型时,受成本控制、安装空间和总质量要求等方面的约束,通常配置在正交轴方向上的陀螺仪和加速度计比斜置轴方向上的精度高,为了实现更高的导航制导精度,在故障状态下系统重构时,优先选用无故障的正交表提供的测量信息进行导航计算。
隔离故障惯性仪表并完成冗余信息重构后,系统的故障适应能力明显提高,可以应对二度及二度以上的同类单表故障。
4.2 十表惯组正交轴惯性仪表故障下的信息重构
当五表陀螺仪/加速度计的正交轴出现故障时,通过信息重构可由其他斜置轴的冗余信息准确估计出故障正交轴向的导航信息,具体方法如下:
五表配置下的陀螺仪/加速度计的输出方程为[10]
式中Z∈R5为五轴向惯性仪表的测量信息;ω∈R3为系统三正交轴的角增量/视速度增量信息;H为惯组的测量矩阵;ε为均值为零的高斯白噪声。
将两斜置轴OS和OT分别投影在XOZ平面上,得到斜置轴投影线OS'和OT',如图4 所示,αS、αT分别为从OX1轴顺时针旋转至OS和OT轴的角度,βS'、βT'分别为从OY1轴逆时针转至OS'和OT'轴的角度。

图4 十表光学惯组斜置轴投影示意Fig.4 Schematic of oblique axis projection in ten-sensor optical strap down inertial unit
假设陀螺仪在五表配置下,经故障检测到安装Y轴的陀螺仪GY发生故障,其输出信息被系统进行故障隔离,需要使用其他无故障陀螺仪进行信息重构。
a)使用无故障表GX、GZ、GS进行信息重构。
由此,得到:
在当前假设条件下,wx=ZGX,wz=ZGZ,可以进一步得到GY的正确输出为
b)使用无故障表GX、GZ、GT进行信息重构。可得到:
在当前假设条件下,wx=ZGX,wz=ZGZ,可以进一步得到GY的正确输出为:
c)使用无故障表GX、GS、GT进行信息重构。可得到:
求解可得到:
d)使用无故障表GZ、GS、GT进行信息重构。可得到:
求解可得到:
4.3 冗余信息的选用
基于第2.2节和第2.3节中以陀螺仪为例的各单套惯组内部同类表一致性故障判别和两惯组之间一致性故障判别和定位结果,隔离惯组中故障陀螺仪/加速度计的测量输出信息。再利用冗余信息重构技术分别得到由两惯组测量输出导航解算得到的角增量/视速度增量。最后,遵从优先使用主惯组信息以及尽量选用无故障的正交表惯组测量信息进行导航计算这两项原则,完成冗余信息的选用,依据冗余信息使用真值表确定用于导航控制的角增量/视速度增量信息,使得在惯组发生故障的情况下,火箭经过长时间飞行后仍能尽可能减少精度损失,确保在本文提出的惯组冗余方案冗余度可覆盖的故障模式下实现精确入轨。冗余信息使用真值见表6。

表6 冗余信息使用真值Tab.6 Truth for redundant information
5 结 论
本文针对重型运载火箭的任务特点及可靠性需求,提出了一种基于双十表光学捷联惯组的主从冗余方法与信息重构技术。首先,给出了冗余信息处理方案,并设计了双五表陀螺仪/双五表加速度计一致性故障诊断算法。再基于故障诊断结果,设计了冗余信息重构流程以及十表惯组正交轴惯性仪表故障下的信息重构算法。最后,遵从优先使用主惯组信息以及尽量选用无故障的正交表惯组测量信息进行导航计算这两项原则,完成冗余信息的选用。
本文提出的技术方法实现了在双十表光学惯组配置下最大限度地对故障进行检出与隔离,满足长时间飞行任务中,在惯组三度以下同类表故障的情况下,控制系统仍可靠工作的需求,并确保运载火箭完成发射任务。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
杭州(2019年16期)2019-09-10 07:22:44
心声歌刊(2019年1期)2019-05-09 03:21:34
测控技术(2018年2期)2018-12-09 09:01:02
证券市场红周刊(2018年40期)2018-05-14 19:45:16
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
导航定位与授时(2016年4期)2016-03-16 06:36:51
中国惯性技术学报(2015年1期)2015-12-19 13:11:44
