矿用无轨胶轮车调度系统的设计及应用分析
2023-11-04 06:30:24谢昌辰
西部探矿工程 2023年10期
谢昌辰
(晋能控股集团寺河煤矿,山西 晋城 048200)
1 概况
与传统的有轨交通方式相比,无轨胶轮车更具优越性,在煤矿生产中得到了广泛的应用。然而,由于矿井路面不平、视线不佳、道路狭窄等诸多不利条件,严重影响着无轨胶轮车的安全。在矿井中,如果车辆运行调度不当,可能会引起矿井内车辆相撞,从而影响矿井的正常生产,甚至会引起重大的安全事故和人身伤亡。在煤矿井下,通过规划调度系统,实现无轨胶轮车的安全调度,是保证行车安全的一种行之有效的方法。本文就是以晋能控股煤业集团某煤矿为背景,对无轨胶轮车的调度系统进行了设计和研究,并在实践中收到了很好的应用效果[1]。
2 无轨胶轮车调度系统整体方案设计
2.1 整体方案
晋能控股煤业集团某煤矿无轨胶轮车调度系统的总体方案见图1。整个系统包括三个主要部分:井上运输调度中心、井下监测基站、通讯模块。井下监测基站主要由监控摄像机、信号灯、接收节点、发送节点组成,主要功能是采集井下无轨胶轮车的状态信号,同时还采集到重要路口的信号灯状况和视频监测信息。井上运输调度中心主要由服务器、监控屏、控制器等组成,其主要功能是通过对井下的数据进行分析、挖掘,从而判断出其具体的位置,并根据矿井的实际状况对车辆进行科学、安全的调度,以防止车辆在巷道中发生碰撞[2]。通讯系统主要是为了在监测基站和调度中心之间建立数据通讯。
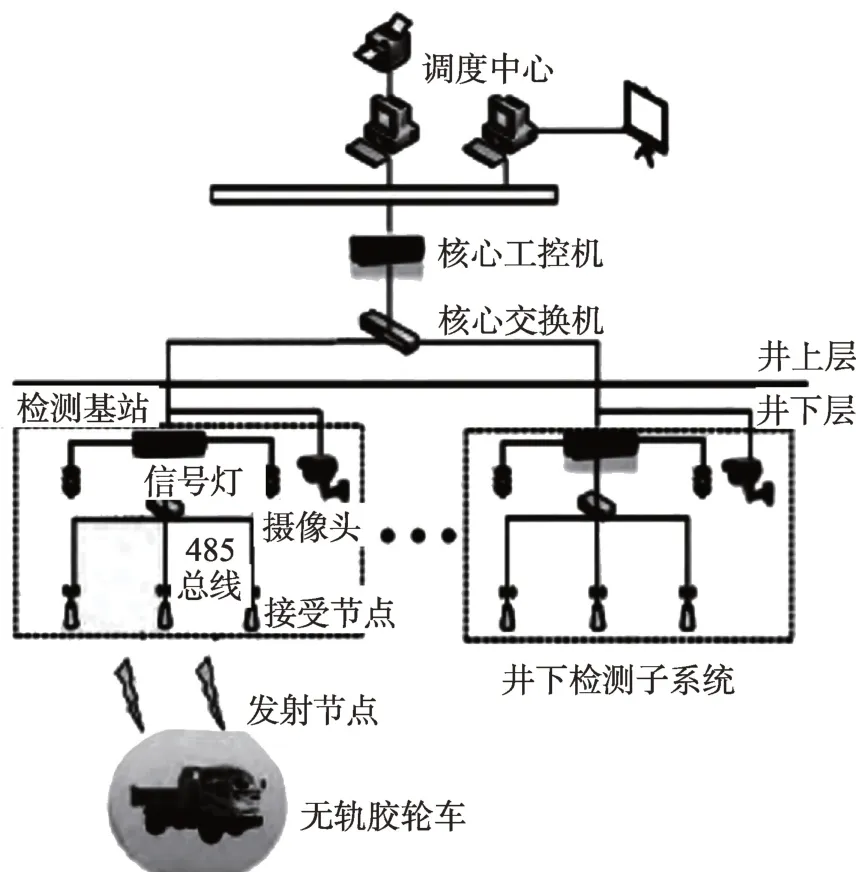
图1 无轨胶轮车调度系统整体方案
2.2 定位原理
由于无轨胶轮车推进器在工作过程中是实时运动的,所以传输端和接收端是采用无线电通信。在无轨胶轮车上设置了一个传输节点,每个车辆都配备了一个传输节点,并且每个传输节点都具有特定的代码。在矿井中,接收节点按特定的间隔设置。在调度系统运行过程中,发送端以特定的频率发送带有数字和方位的数据,临近的接收节点会获取对应的频率信号,发送给运输调度中心的控制端进行数据处理,并最终进行车辆位置的确定[3]。
3 无轨胶轮车的调度过程分析
井下定位和接收指示信号的信号组成了一个调度系统。图2中显示了无轨道胶轮车的调度程序。在巷道内,每隔一定的间隔设一个避车硐室,在硐室的两边各设有一个信号灯,这两个硐室之间的空间叫做行车区域。当车辆进入避车硐室时,调度系统将自动判定前方行车区间内有无车辆通过,若无,该车辆可直接进入前方行车区间;若在前方行车区间内发现与本车辆相反的车辆,则进入避车硐室进行避让;当前方行车区域内有一辆车在行驶,并且在同一方向上行驶时,该车辆会在信号灯亮起的情况下与前面的车辆保持一定的安全距离;当交通信号灯为绿色时,该车辆才能进入前面的行车区域。

图2 无轨胶轮车调度过程
此外,在巷道的重要位置,例如斜度大、拐弯处,安装了高分辨率的防爆摄像机,可以让指挥中心的工作人员对重点区域进行监控。在遇到紧急状况时,指挥中心的工作人员可以人工控制交通信号,及时提醒小车驾驶员及时关注到异常情况,确保无轨胶轮车的行驶[4]。
4 调度系统主要硬件选型
4.1 处理器的选型
作为整个调度中心的处理器,其全部的信息都要经过通讯网络传送至处理器进行处理,并输出最终的计算结果。CPU 在进行数据分析后,会发出相应的控制指令,并通过发出相应控制信号来进行交通信号的控制。根据矿山的具体条件,可选择了西门子S7-200型智能控制装置,该型号控制装置在行业中得到了广泛的使用,具有性能稳定、编程方便、通用性强等优势,I/O 端口丰富,能够与各种类型的硬件设备相联接,保证了整个调度体系的扩展性。此款CPU已集成以太网RS485接口,能实现各种不同的通讯方式。
4.2 定位模块的选型
该定位系统由一个发送端和一个接收端组成。本设计采用CC2530型的单片机作为核心,采用Zigbee技术进行无线数据传送,其中包括了信号的接收、发送等多种应用,提高了系统的整体硬件和设备的兼容性,避免了因硬件不相容而造成的不稳定问题。CPU 采用8051处理器,其性能参数满足实际使用需求。CC2530系列的单片机,抗干扰性强,适用于矿井中较为复杂的矿井作业,其检测精度高,检测灵敏,该方法还提供了RSSI 的位置控制,使整个调度体系的架构得到了极大的优化,提高了定位结果的准确度。图3显示了无轨胶轮车的定位模组。
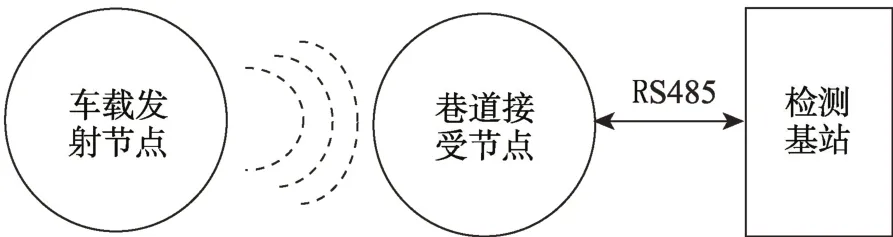
图3 无轨胶轮车定位模块通信
4.3 交换机的选型
交换机是通讯中的一个关键部件,它是井下和地下通讯的一个枢纽,在井下的各个地点,都必须用工业以太网的方式和中央交换器相连,以便与地面指挥中心实现信息交互和控制指令的发送。该系统采用KJJ18本质安全型交换机,其额定工作温度区间为0℃~40℃,相对湿度为95%,气压80~100kPa。KJJ18系列交换机能够实现RS485 和工业以太网通讯,其通讯速率超过100m,能有效地实现对视频数据的实时传送,具有高速和低延时的特点[5]。
5 调度系统的软件设计
调度系统的软件部分是整个系统的核心,同时也是实现系统功能的核心,井下软件程序作为系统功能实现的基础,本文将对软件程序进行重点介绍。井下段的主要功能是采集无轨胶轮车运行状态的参数信息,并通过获取的参数判断车辆实际的位置与行进的方向。同时,通过井上部件的控制命令,实现对信号灯的控制。井下的各个硬件模块必须与软件相配合,以达到各种功能。图4是整个矿井系统的软件结构方块图。
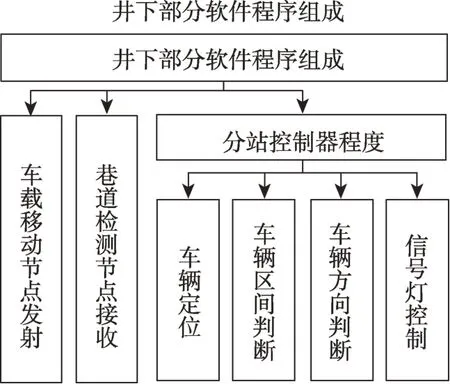
图4 井下部分软件整体构成
在该图中,最关键的是确定了无轨道胶车的位置和移动的方位,如图5所示,说明了该无轨胶轮车的定位方法的基本流程。在进行调度时,探测节点会持续地接收到从运动节点发送来的信号。在接收到三个由相同的运动结点发送的数据时,可以从中筛选出三个强度最大的信号,每个数据集都有一个唯一的RSSI,这个RSSI 值可以确定每个运动结点与探测结点的间距。通过RSSI 的数值,可以求出二者的间距,然后利用三角形中心的方法,求出运动结点的空间坐标,也就是车辆的精确定位。
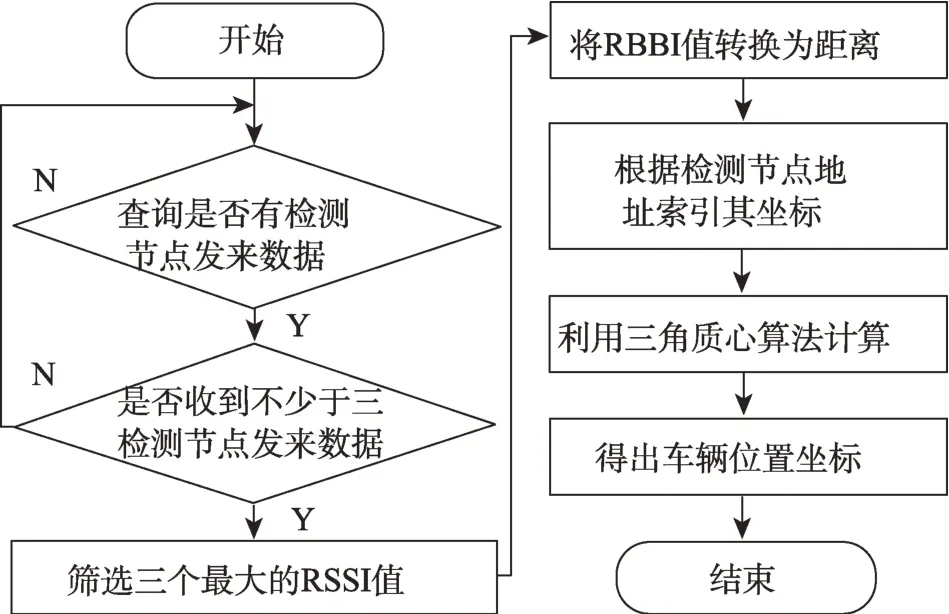
图5 无轨胶轮车定位方法流程图
在对无轨胶轮车的运动方向进行判定时,主要依据在固定检测节点与移动节点间的RSSI 值。RSSI 越小,则表示二者之间的距离越远,反之,RSSI越大,则表示两者之间的距离越近,利用该方法可以对车辆的行驶方向进行判定[6]。
6 调度系统的实践应用分析
通过对晋能控股煤业集团某矿井的实际运行,对该矿井的各种性能指标进行了检测,试验历时3 个多月,以证实该方案的有效性[7]。
经反复试验,所研制的排程控制方案能够很好地完成各个功能,达到了预定的目标。在矿井内对该系统进行了调试后,进行了车辆的位置精度测试,并进行了10次测试,取得了良好的效果,图6为精度测量结果。汽车的位置精度为0.2~1.0m,可充分地适应矿井生产的要求。该系统能够精确地安排矿山内的交通工具,大大提高了调度的效率。采用本装置后,没有发生重大的无轨胶轮车相撞事件,为矿井生产提供了可靠的保障[8]。
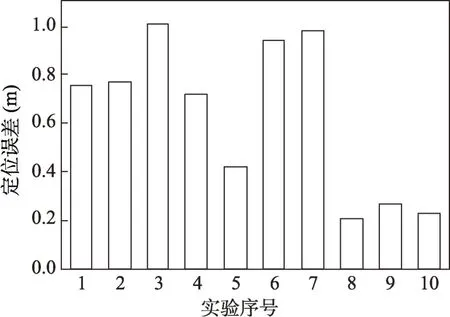
图6 无轨胶轮车定位精度试验测量结果
7 结语
本文以晋能控股煤业集团某煤矿的无轨胶轮车为例,进行了无轨胶轮车的调度系统的设计与研制。该调度系统分为三个主要的模块,即井上运输调度中心、井下监测基站、井上与井下的数据信息交换的通信模块。该方法的基本思想是获取矿井内的无轨胶轮车的位置和行车的方位,并利用巷道内的交通信号来进行车辆的调配,避免由于井下的突发状况造成的意外事故。采用该方法研制的无轨胶轮车排程系统,取得了较好的经济效益,并达到了各方面的要求。
猜你喜欢
机械管理开发(2022年10期)2022-11-12 08:49:20
机械管理开发(2020年4期)2020-06-10 13:36:48
中国煤炭工业(2019年1期)2019-06-17 12:00:18
经济技术协作信息(2018年22期)2019-01-19 03:00:22
山西焦煤科技(2016年4期)2016-12-01 06:03:49
汽车与安全(2016年5期)2016-12-01 05:22:12
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11
机械工程师(2015年9期)2015-02-26 08:38:25
中国交通信息化(2014年4期)2014-06-05 03:51:17