基于鲸鱼粒子群融合算法的MPPT研究
2023-11-04 09:53贠武超
电源技术 2023年10期
贠武超
(郑州大学电气工程学院,河南郑州 450001)
伴随着碳中和国家战略及整县分布式光伏的快速持续推进,各地分布式光伏迎来跨越式发展,但工业区、居民楼等屋顶安装的光伏阵列往往会存在部分阴影遮挡,光伏电池模块由于其并联二极管作用会使光伏阵列输出特性曲线呈现不同的峰值。要使光伏系统在复杂光照下运行在最大功率点,就需要对光伏系统最大功率点跟踪(MPPT)技术进行深入的研究。
传统的MPPT 算法在均匀光照下能很快寻找到最大功率点,但在复杂光照条件下,因算法自身缺陷易陷入局部最优而不能准确追踪到最大功率点,因此国内外学者提出了一些智能MPPT 算法,例如,遗传算法[1]、模糊控制算法[2]、神经网络算法[3]、粒子群算法[4]、鲸鱼算法[5]等被应用在MPPT 中。其中,粒子群算法原理简单,控制变量少,但易于陷入局部最优值,导致寻优失败。鲸鱼算法是2016 年由澳大利亚学者提出的一种新的智能算法,该算法具有良好的全局搜索能力,前期收敛效果好,后期搜索速度较慢,易产生搜索偏差。针对粒子群算法和鲸鱼算法的不足之处,本文提出一种新的鲸鱼粒子群融合算法并将其应用于MPPT 中,该融合算法能够有效避免单一智能算法解决MPPT 问题的局限性,增强了鲸鱼算法后期的收敛能力,避免了粒子群算法易停滞于局部极值的缺陷,最后,通过仿真对比验证了混合算法在最大功率点跟踪过程中的优越性。
1 阴影遮挡下光伏阵列输出特性
在实际工程运用中,光伏阵列由多个光伏组件串并联而成。在太阳光照射过程中,光伏阵列会受到树木、云朵、周围其他遮挡物的影响,导致阵列出现局部阴影遮挡的情况。为更有效地模拟阴影遮挡对光伏阵列输出特性的影响,在MATLAB/Simulink 环境中搭建3×3 光伏阵列模型,如图1 所示。光伏组件参数为:Uoc=36.3 V,Isc=7.84 A,Um=29 V,Im=7.35 A。

图1 3×3光伏阵列模型
设定仿真环境温度均为25 ℃,光伏阵列各个模块接受不同的光照强度,具体光照强度分布如表1 所示。

表1 光伏阵列各模块光照强度分布 W/m²
在三种工况下,光伏阵列P-U 和I-U 特性曲线如图2~3 所示。
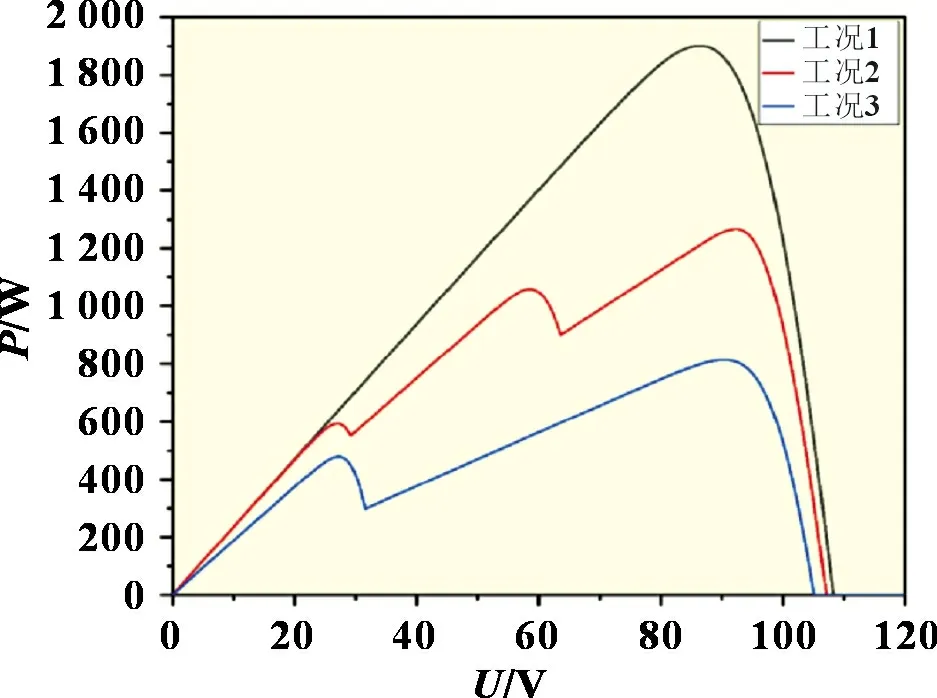
图2 光伏阵列P-U特性曲线

图3 光伏阵列I-U特性曲线
在均匀光照条件下,光伏阵列的输出特性曲线仅存在一个峰值点,在局部阴影遮挡下,由于并联二极管的作用,光照强度的变化会改变光伏阵列输出的单峰特性,且最大功率点对应电压发生偏移,由图2 可知,在工况2、工况3 下,最大功率点电压变化幅度非常小,此时如继续采用经典MPPT 算法进行跟踪,大概率会因算法缺陷而陷入局部最优值。针对此种情况,本文提出一种基于鲸鱼粒子群融合算法的MPPT 控制策略来加快算法跟踪过程,提高算法跟踪精度。
2 融合算法
2.1 粒子群算法原理
在粒子群算法中,可以把复杂问题的解看成鸟群寻找食物的过程,把所有的可能解看作粒子,每个粒子都有速度、位置,粒子群在搜索过程中会将个体最优值存储下来,并将其作为下次搜索的飞行经验,把所有粒子当前最优值作为指引粒子群运动的方向。
进行迭代时,所有粒子的状态更新公式为:
2.2 鲸鱼算法原理
2.2.1 基本原理
鲸鱼算法主体由围绕猎物、对猎物进行气泡攻击捕食和随机搜索猎物三个部分组成。
围绕猎物阶段,每只鲸鱼在搜索范围内所处位置代表待优化问题的一个可行解,鲸鱼围绕猎物阶段数学模型为:
式中:D为当前鲸鱼所处位置与最优鲸鱼所处位置的距离向量;t为当前迭代次数;X(t)为当前鲸鱼的位置向量;X*(t)为搜索到当前空间区域内最优鲸鱼的位置向量;X(t+1)为更新后的位置向量。系数向量A、C的数学模型如式(5)~(6)所示:
式中:r为[0,1]的随机向量;Tmax为最大迭代次数。
鲸鱼气泡捕食过程采用螺旋形进行收缩包围的方式,为了体现鲸鱼捕食两种行为机制的同步性,将其更新概率均设置为50%。通过随机参数p来对算法的两种机制进行选择,两种同步捕食机制的数学模型如式(8)所示:
式中:p为[0,1]之间均匀分布产生的随机参数。
在随机搜索猎物阶段,鲸鱼个体不再以最优鲸鱼个体作为参照物进行搜索,而是在所有鲸鱼群中随机选取一只鲸鱼作为参照进行位置更新,此时,|A|>1,鲸鱼的搜索范围变大,种群多样性增加。此阶段的数学模型如式(9)~(10)所示:
式中:Xrand为目前所有种群中随机一只鲸鱼的位置向量。
2.2.2 鲸鱼算法优化
本文借鉴粒子群算法中惯性权重设置方式将其引入到鲸鱼算法的包围猎物和螺旋更新机制位置更新中,惯性权值w的大小随迭代次数的增加而呈非线性递减,当算法在初期运行时,惯性权重系数大,具有较强的全局搜索能力,随着迭代次数的增加,惯性权重逐渐减小,算法可在某一区域进行局部精细开发,防止算法陷入局部最优,同时提高解的精度。鲸鱼位置及惯性权重更新公式如式(11)~(12)所示:
标准鲸鱼算法设置概率阈值为0.5,但随着搜索后期迭代次数的增加,这种方式的捕食方式会使算法陷入局部最优,因此本文提出一个自适应概率阈值Pm来平衡鲸鱼算法的勘探开发能力,Pm的表达式如式(13)所示:
2.3 融合策略
针对粒子群算法和改进鲸鱼算法的优缺点,取长补短,将这两种智能算法融合起来提出一种鲸鱼粒子群融合算法,其基本思想是:首先进行算法种群的初始化,将种群按照相同的规模大小等分为子种群1、子种群2,其中子种群1执行鲸鱼算法,子种群2执行粒子群算法,进行寻优。两个子种群执行完算法后,将两个子种群个体按照适应度值大小分别进行排序,将各自种群中排名前50%的个体组合成新的种群。接下来按照交叉操作的思想对新的种群个体间信息进行交互,增强种群的多样性。最后将交互好的种群3 根据相同的选取比例,随机返回子种群1、子种群2中,来代替原种群个体的位置。
交叉操作的主要思想如下:为了实现个体间的交叉操作,按照前述方法将子种群1、子种群2 中适应度值排名前50%的个体组合成一个新的种群3,将种群3 的个体作为父代,执行个体间的交叉操作。交叉操作是部分交换两个待优化个体的编码以生成新个体的操作,由于时间总体较小且单点交叉操作简单[6],因此交叉操作通过单点交叉方法实现。设交叉概率为Pc,在[0,1]中随机生成一个Pr,若大于Pc,两个父代个体直接进入下一代,否则将两个父代个体的某些基因进行交叉重组,从而形成新的一对个体。新个体的属性与原始的父代属性对应关系如下:
式中:r为[0,1]的随机数;xi(n)和yi(n)分别是第n代某两个个体上的第i位属性。
融合算法流程为:
(1)初始化鲸鱼算法和粒子群算法的所有参数;
(2)将种群大小按照随机分配的原则划分为两个同规模的子种群1、子种群2;
(3)子种群1 执行鲸鱼算法,子种群2 执行粒子群算法;
(4)将两个子种群个体按照适应度分别排序,取两个子种群前50%组合成种群3;
(5)按照式(14)对新种群3 的个体进行基因交换并将新种群个体重新组合,按原比例选取个体随机放回子种群1、2 中,替换原有种群对应个体位置,种群规模不改变;
(6)再次计算每个个体的适应度值并更新全局最优解,继续进行迭代;
(7)判断是否满足终止条件,若满足,则终止算法并输出全局最大功率点电压;反之,重新进行下一次迭代。
3 仿真结果分析
为验证融合算法的优越性,对粒子群算法、鲸鱼算法、融合算法三种智能算法在不同光照条件下跟踪MPP 的能力进行对比分析。在MATLAB/Simulink 环境下构建光伏发电系统模型,仿真系统主要包括3×3 光伏阵列、Boost 电路、S 函数控制模块,构建光伏阵列和Boost 电路后,利用S 函数编写三种MPPT 控制方法,这三种程序对应的算法分别为粒子群算法、鲸鱼算法和融合算法,并将其封装成一个模块,通过算法找到的占空比来控制绝缘栅双极型晶体管(IGBT),避免了用三角波模块与占空比参考值进行比较产生脉冲宽度调制(PWM)波信号的误差,提高了仿真的速度与精度,最后在示波器中观察记录跟踪波形。光伏系统仿真结构如图4 所示。

图4 光伏系统仿真模型图
3.1 均匀光照下仿真对比分析
假设光伏电池模块PV1~PV9 均处于1 000 W/m²光照强度下,对三种算法进行仿真,结果如图5 所示。
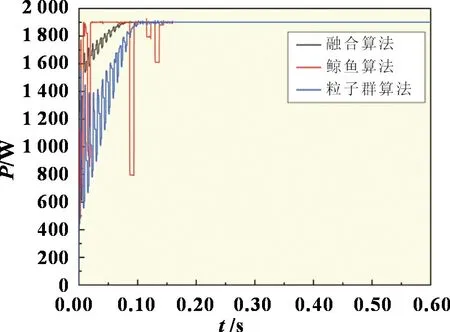
图5 均匀光照下仿真结果
在均匀光照下,三种算法都能够跟踪到最大功率点,但输出功率、跟踪速度及振荡幅度存在差异。均匀光照下的三种算法跟踪效果如表2 所示。

表2 均匀光照下的三种算法跟踪效果
由表2可知,在跟踪精度方面,粒子群算法、鲸鱼算法和融合算法跟踪到的最大功率分别为1 901.016 23 和1 900.772 36、1 903.165 12 W;在跟踪速度方面,粒子群算法、鲸鱼算法和融合算法的跟踪时间分别为0.157 85 和0.159 45、0.126 02 s,融合算法在速度上相较粒子群算法和鲸鱼算法提高了20.16%、20.97%。粒子群算法和鲸鱼算法前期振荡波动明显,功率损耗严重,发电效率降低,融合算法后期收敛能力明显改善,振荡减小。故融合算法在均匀光照下跟踪效果优于另外两种算法。
3.2 动态阴影仿真对比分析
假设光伏电池模块PV1~PV9 在0~0.3 s 处于光照强度1 000 W/m²下,在0.3 s 时光照强度突然改变为600 W/m²,对三种算法进行仿真,结果如图6 所示。
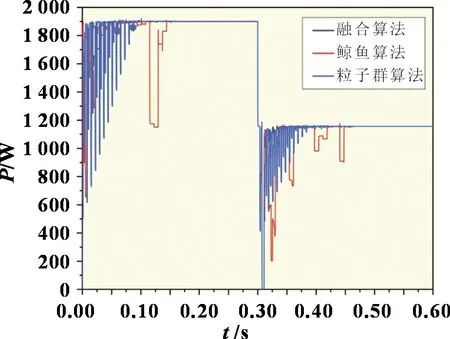
图6 动态阴影下仿真结果
在光照发生突变后,动态阴影下的三种算法跟踪效果如表3 所示。

表3 动态阴影下的三种算法跟踪效果
由表3 可知,融合算法在0.371 58 s 搜索到最大功率点1 156.136 31 W,粒子群、鲸鱼算法分别在0.456 06、0.459 48 s搜索到最大功率点,融合算法在光照发生突变后追踪至最大功率点较其他两种算法速度分别提高了51.82%、52.85%。在追踪初始阶段,粒子群算法、鲸鱼算法振荡幅度较大,而融合算法经过较小的振荡幅度即追踪至最大功率点附近。通过以上分析得知,在外界光照条件发生动态变化时,融合算法依然能快速跟踪到最大功率点,输出功率也更稳定。
综上可知,粒子群算法、鲸鱼算法、融合算法在光照均匀情况下都能追踪到全局最大功率点,与其它两种算法相比,融合算法收敛速度加快,收敛精度提高,前期追踪过程中震荡幅度减小,能量损耗降低;融合算法同样适用于光照强度发生改变的状况,在局部阴影发生动态改变时,依然能快速准确追踪到最大功率点且追踪精度高。
4 结论
针对局部遮阴情况下光伏阵列输出特性曲线呈多峰值的问题,本文通过引入自适应阈值和惯性权重来改进鲸鱼算法,在分析鲸鱼算法和粒子群算法原理和优缺点的基础上,采用新的混合优化策略提出了鲸鱼粒子群融合算法,在MATLAB/Simulink 环境下搭建光伏系统仿真模型,对粒子群算法、鲸鱼算法和鲸鱼粒子群融合算法进行了不同光照条件下的仿真分析,仿真结果验证了本文所提改进算法在不同光照条件下均能以较快的速度收敛到最大功率点并稳定输出。
猜你喜欢
幼儿100(2022年41期)2022-11-24
今日农业(2022年15期)2022-09-20
中国机械工程(2022年8期)2022-05-09
中国机械工程(2021年8期)2021-05-07
数学大王·趣味逻辑(2020年9期)2020-09-06
小天使·二年级语数英综合(2019年4期)2019-10-06
音乐教育与创作(2019年8期)2019-05-16
动漫星空(2018年4期)2018-10-26
红土地(2018年7期)2018-09-26
河南科技(2014年4期)2014-02-27