
磁吸式扫码器固定调节装置的研究
2023-11-02 01:50:06黄素丹王金龙
五金科技 2023年5期
黄素丹 王金龙
引言
目前生产车间设备类型多种多样,快供分拣许多采用人工分拣,劳动强度大效率低,易造成漏拣、误拣和快件损坏等。加之智能化信息化的优化,大量设备增加了视觉识别系统,其中核心装置就是扫码器以及工业相机等。
一 关于视觉识别系统固定装置的分类
当前,关于视觉识别系统固定装置的研究已经开展多年,国内外根据实际需求进行了大量的研究, 从实用性及可靠性来讲,具有代表性的有以下几种:
1 旋转扫码装置,装置中包括旋转装置其上方连接导向柱,导向柱上安装底座,底座上安装有扫码器支架,扫码器支架上安装有扫码器,扫码器支架包括连接头和旋转支架,连接头的一端安装在底座上,连接头的另一端开有弧形孔,旋转支架通过弧形孔与连接头连接,旋转支架可相对连接头转动,旋转支架上安装有扫码器安装板,扫码器安装板可相对于旋转支架转动。通过旋转装置实现了扫码,复位等连续扫码的过程,通过导柱上安装底座的位置实现扫码位置的调整。这类装置调节方便,但设计制作较为复杂,对空间要求比较大,此外,也很难实现所有角度都进行快速可靠的调节。
2 板材扫码装置,装置包括底板,在底板上设有支座,在支座上设有安装板,在安装板上连接滑轨和推动气缸,所述滑轨与扫码器支架上的滑块滑动连接,所述推动气缸的推杆连接扫码器支架,在扫码器支架上连接扫码器,所述推动气缸的推杆带动扫码器左右移动扫码,所述安装板带动扫码器上下移动扫码。该装置成本较低,但有许多角度是不能够有效调节的,比如倾斜角度要求较高的情况,这就存在较大的局限性。
3 太阳模拟器用扫码器支架。装置包括沿竖直方向固定于太阳模拟器外部的底座,底座上可滑动地设置有沿水平方向延伸的支撑臂,支撑臂的外端可滑动地连接与扫码器相配合的扫码器安装架,扫码器安装架与支撑臂位于同一水平面内,且扫码器安装架与支撑臂相垂直。使用过程中,将扫码器安装于扫码器安装架上后,通过底座与支撑臂间的滑动配合,能够实现在竖直方向对扫码器位置的移动,通过支撑臂与扫码器安装架间的滑动配合,能够实现在水平方向上对扫码器位置的移动,整个操作过程简便易行,且整个操作过程无需工作人员对扫码器进行手动拿取,避免了因频繁拿取而对扫码器造成的磨损,从而使得扫码器的使用寿命得以相应延长。该装置可靠性高,但调节角度依然存在很大的局限性。
4 扫码器支架。支架包括托板,还包括设置在托板上的第一支管以及与第一支管联通的第二支管,第一支管与托板呈45°-60°的角度固定连接,第二支管垂直固定在第一支管上,第一支管用于走线,第二支管用于放置扫码器的手柄。具有固定安装、稳定性好、可隐藏收纳扫码器电线的优点。但不仅调节角度有局限性,而且不够智能。
综上可见,虽然国内对于固定装置均进行了大量研究,并研制出了多种多样的固定装置但依然都存在不同程度的不足。随着科技的发展及生产车间的多样化,视觉识别系统固定装置对于技术的需求也原来越高,比如旋转角度、调节时间、调节难易程度、控制方式等,均向着可旋转、无死角和远程、易调节等方向发展。
基于此,当前不同生产车间中,视觉识别系统在运行过程中由于环境不同,会产生不同的识别干扰,本文通过研究一种固定装置解决以下问题:
(1)避免普通扫码器支架固定不牢固的现象;
(2)消除普通视觉识别装置的固定机构调整角度盲区;
(3)避免装置因使用久而不灵敏、固定不稳。
二 设计方案
本文研究内容针对一种磁吸式扫码器固定调节装置,主要涉及的研究内容包括以下几个方面:
1 抗干扰保护罩。因视觉识别装置对电磁和外围环境要求较高,因此要慎重考虑保护罩的材质。
2 磁铁形状的研究。为达到旋转无死角的功能,需要将磁铁设计为空心球形,或磁铁相连接的金属结构设计为空心球形,便于实现扫码装置摄像头的无死角转动。
3 磁铁通断电功能选择。为了达到通电易调节,断电强磁力,选择电磁铁为失电型电磁铁。
三 机械部分设计
根据本文设计思路,机械结构如下图所示:
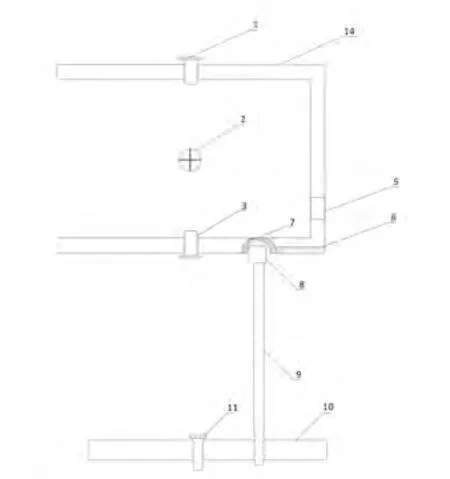
图1 装置整体结构图
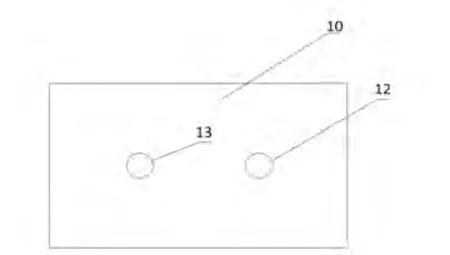
图2 底座俯视图
上述设计的结构中,1-4 为尼龙螺钉,5 为线孔,6为电磁铁电线通道,7 为半球形金属,8 为失电型电磁铁,9 为衔接螺杆,10 为固定底座,11 为螺钉,12-13 为螺栓孔,14 为防护罩。
上述设计的结构功能,可以作如下描述:
图中14(防护罩)是整个包围扫码器的外罩,材料是塑胶,整体图的左边是扫码器的镜头侧,整体图的右边是扫码器保护罩的背面,也就是扫码器中镜头的反方向。
图中的1、2、3、4 是尼龙螺钉,可以直接拧进14(防护罩),当扫码器放入14(防护罩)中,就可以通过1、2、3、4(尼龙螺钉)从四个方向进行固定,塑胶材料的使用以及尼龙螺钉,既节约成本,也容易加工,同时对扫码器也没有伤害作用,并且从四个方向固定,可以使固定非常牢固,通过螺钉拧进到防护罩的方式,不仅能快速固定,也能够便于调节不同方向的固定深度。为了适应不同扫码装置的尺寸,将螺钉带螺纹部分直径确定为5mm-8mm,可以达到节约成本,有效固定的效果。
图中5(线孔)是防护罩后面留的两个孔,当前许多的扫码器需要有2 条线,其中一条是供电线(用于连接电源),另一条是通讯线(用于连接计算机等主控设备),这两个孔的作用就是给扫码器固定后,能够方便的将两条线连接,既起到固定作用,又能避免绕线而带来的不便利,也能够使连接部分在防护罩内被保护,避免撞击、尘土。根据不同电源线及通讯线的尺寸,为起到通用效果,可将防护罩的线孔直径确定为6mm-10mm。
图中7 是一种半球形的能够被失电型电磁铁吸附的金属,为了节约成本,使用铁质材料就可以实现,与14(防护罩)通过强力胶进行固定,保证牢固可靠。8(失电型电磁铁)的原理是当给它通电,该磁铁的磁性就会消失,失电时候,磁性就会产生,作用就是和金属材料的7 相连接,二者之间恰好紧密接触。当给电磁铁供电时,电磁铁8(失电型电磁铁)可以和7(之间随意旋转,没有阻力,这就达到了可以整个空间无死角旋转的效果,也通过旋转找到扫码器的最合适角度,调整到合适角度后,将8(失电型电磁铁)断电,这时候就瞬间有了磁性,同时产生极大的磁力,两者之间牢牢固定。选用失电型电磁铁,目的之一就是固定时候,不需要通电,起到节约电能的作用,目的之二就是能够通过磁力,牢牢的和7 球形金属固定,使其不会因为时间久出现的磨损而导致固定不稳。图中6(电磁铁电线通道)的作用就是将电磁铁的电线放入其中,从而能够跟电源连接,6(电磁铁电线通道)的设计优点在于节省空间,避免电线从外面绕出来,也能够通过放置在14(防护罩)下边部分的内部,起到防尘防撞的目的。
图中9(衔接螺杆)的顶端是圆柱形结构8(失电型电磁铁),下端是带有螺纹的螺钉结构,顶端的作用是与8(失电型电磁铁)有效衔接,可以通过加工成带有螺纹的结构,也可以用强力胶固定,与上端共同起到调节作用,下端作用是拧到10(固定底座)中的12(螺栓孔一),11(螺钉)的作用是拧进10(固定底座)中的13(螺栓孔二),根据两点确定一条直线的原理,一旦扫码器位置确定好,那么就将10(固定底座)中的12(螺栓孔一)位置固定,13(螺栓孔二)根据设备结构特点进行旋转调节确定,确定好后,将9(衔接螺杆)的顶端拧进12(螺栓孔一)和设备中的螺栓孔,将11(螺钉)的拧进10(固定底座)中的13(螺栓孔二)设备中的螺栓孔,起到可调节、固定的作用。为能够支撑整个装置的重量,并且能够有效将装置固定在设备商,底座的螺栓孔大小可以确定为6mm-12mm。同时,考虑到当前大部分工厂生产传送带主体结构为铁制材料,因此底座部分可以设计成磁性材料,这样可以直接吸附安装,也可以进行螺钉拧紧固定。
四 电气部分设计
根据设计方案要求,本装置可以分为远程控制通断电和本地控制。其中,本地控制的特征就是当技术人员调整扫码装置摄像头方向时,通过船形开关控制调整装置中的失电型电磁铁,进而调节摄像头方向。远程控制方式的优势就是增加调节装置的智能化水平,核心思路是通过远程开关控制电磁铁得电和断电,这就避免了调节过程中必须没有电气基础的人员能够在技术人员的远程指导下进行调节,节约了人工成本。
电气回路原理图如上图3 所示:
猜你喜欢
机械工程与自动化(2023年6期)2024-01-03 07:41:50
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:44
小猕猴智力画刊(2022年10期)2022-11-02 06:33:56
电子测试(2021年22期)2021-12-17 11:19:16
机械工业标准化与质量(2021年8期)2021-10-13 06:44:24
防爆电机(2021年2期)2021-06-09 08:14:38
电力设备管理(2021年4期)2021-05-11 02:44:48
减速顶与调速技术(2021年3期)2021-03-09 03:15:00
化工管理(2021年3期)2021-01-29 09:24:02
传感器世界(2019年5期)2019-08-07 06:10:06
