
水下光电成像技术研究进展
2023-11-02 08:22:30程宏昌李世龙邱洪金丁习文
红外技术 2023年10期
石 峰,程宏昌,闫 磊,郭 欣,李世龙,邱洪金,丁习文
〈综述与评论〉
水下光电成像技术研究进展
石 峰1,2,程宏昌1,2,闫 磊1,2,郭 欣1,2,李世龙1,2,邱洪金1,2,丁习文1,2
(1. 昆明物理研究所,云南 昆明 650223;2. 微光夜视技术重点实验室,陕西 西安 710065)
随着我国海洋、江河和地下水资源勘探、开发和利用的日益深入,以及领海主权防卫的军事需求日趋迫切,在水下获取远距离条件下高质量的目标图像已成为水下环境勘测、目标探测与敌我对抗等许多领域迫切需要解决的问题。目前,水下成像探测技术主要有声探测和光电探测两种途径。本文研究了目前主要水下高分辨力光电探测成像技术现状,分析了不同技术途径的优缺点,对比了各种水下探测/成像系统中采用的光电探测器的情况,结合自身技术背景,提出了应加快发展高灵敏度、低噪声、高增益、快响应、宽动态范围、良好线性度的GaAsP光阴极双微通道板像增强器,从而简化光电系统中因探测器性能不佳带来的灵敏度低、噪声大、增益低、处理时间长等不足,加速各种新技术向产品、实用化设备的转化。本文成果对水下光电成像技术发展将有一定支撑作用。
水下探测;光电成像;探测器
0 引言
地球表面超过70%以上都是海洋,其中蕴藏着丰富的油气资源、生物资源、空间资源和可再生能源资源等,是人类赖以生存的重要环境以及谋求发展的未知领域。21世纪以来,海洋作为国家经济发展和对外开放的重要窗口,在维护国家主权和获取经济利益方面的作用日益突出[1]。
随着我国海洋、江河和地下水资源勘探、开发和利用程度的日益深入,以及领海主权防卫的军事需求日趋迫切,实现水下高分辨力环境勘测、目标探测与定位分析已成为众多领域水下装备作业迫切需要。目前水下成像探测技术主要有声探测和光电探测两种技术途径[2-10]。声探测技术探测距离较远,但成像空间分辨力较差,难以完全适应诸多水下运载平台以及深海探测作业对高分辨成像探测、观察和定位的需要;水下光电成像技术以其分辨能力高、直观快速地传递目标与景物的二维乃至三维信息,且输出图像更符合人的视觉与心理特征等优点,已被诸多潜水器、水下作业系统、目标探测系统所采用。然而由于光线在水中随传输路径快速衰减,使得水下光电成像需要辅助照明,且由于水下光电成像装备中照明往往与成像系统同向,照明光的后向散射已成为影响水下光电成像系统作用距离的重要因素,使得人眼直接观察以及传统的连续照明光电成像的有效作用距离较短,无法成为实用性的水下光电成像方案,因此在现代水下运载平台和其他应用领域普遍采用一些特殊的光电成像模式。
目前,水下光电成像技术主要有:距离选通光电成像技术、激光同步线扫描技术、结构光成像技术、多视角图像重构技术、散射计算光学技术、偏振光成像技术、水下鬼影成像技术以及基于深度学习水下成像技术等。
本文将对上述技术的国内外研究进展进行综述,并对这些系统中所用的探测器进行对比分析,提出建议发展水下光电成像系统中探测器的发展方向,以期对探测器及水下光电成像技术、装备发展提供一些参考和借鉴。
1 水下光电成像技术研究进展
1.1 距离选通光电成像技术
脉冲激光照明距离选通光电成像技术是一种有效的水下光电成像技术,目前已经在遥控无人潜水器(remote operated vehicle, ROV)或自主式水下航行器(autonomous underwater vehicle, AUV)平台以及水下救援等方面得到了广泛的应用[11],并且随着激光器技术和选通成像设备技术的成熟,水下光电成像装置也在不断迭代升级,性能自然也得到巨大提升,作用距离甚至比水下连续照明光电成像系统以及潜水员在自然光照射下水下观察距离高出5~10倍。
1.1.1 技术原理
距离选通技术是利用脉冲激光器和选通门控摄像机,将不同距离的散射杂光与目标景物的反射光分离,从而在摄像机特定开启的选通时间内将目标景物反射的辐射脉冲送至相机并对其进行成像[5](图1)。距离选通水下激光成像技术通过对成像系统快门的时间进行控制,在时域内对大部分会进入成像系统的无效光信号进行屏蔽,从而大幅降低水体后向散射对成像系统探测效果的影响,同时也会提高成像系统的工作范围。当选通脉冲宽度和激光脉冲宽度都很窄,就只有激光探测目标附近的反射光可以到达摄像机并最终成像,这样就可以进一步有效减少后向散射的影响,从而提高系统的探测和识别距离。

图1 水下距离选通成像系统原理[5]:(a) 摄像机关闭状态;(b) 摄像机开启状态
1.1.2 研究现状
Duntley等人[12]在1963年对光波在海洋中的传播特性进行了研究,结果表明,470~540nm的光波在海水中的衰减要远小于其他波段的光波,这个波段被称为“蓝绿窗口”,由于蓝绿激光在海水的优异的穿透能力,逐渐引起了人们的高度重视,成为了水下距离选通成像系统中的理想光源。1990年加拿大启动有关水下距离选通成像的研究,经过整整20年深入探索,已研制出LUCIE1、LUCIE2、LUCIE3这三代产品[13-14](如图2所示);1994年美国SPARTA公司开发出的See Ray测距成像系统能够检测到衰减长度为6.4倍的目标[14]。此外,丹麦、瑞典、新加坡等国家也在这一领域有了一定的突破。
鉴于国外技术封锁,国内应用需求较少,且研究成本较大,故国内关于水下蓝绿激光成像系统的研究进展缓慢。其中国内距离选通水下成像技术研究主要包括:探测距离估算与模拟、图像增强及降噪、三维成像等方面。
为全面、系统地建立水下距离选通成像系统的综合性能模型,胡玲等[15]将一些典型水下激光成像系统与像增强型电荷耦合器件(intensified charge-coupled device, ICCD)相结合,并对后向散射光强度、背景辐射强度等与时间和探测距离的相关性进行了研究,选取了海水的典型参数后利用Matlab对该过程进行模拟仿真。结果表明:随着选通时间、空间频率和探测距离的增加,系统的信噪比(signal-noise ratio, SNR)和调制传递函数(modulation transfer function, MTF)均会显著变差;付学志等[16]给出了一种简便的计算作用距离的方法,由此可以得到在不同水质条件下装置的作用距离;王磊等[17]分析了水下蓝绿激光主动成像目标与背景的辐射特性、海水后向散射特性、距离选通特性以及激光发射器和接收器的性能;提出了一种基于光束扩展函数(beam spread function, BSF)的探测灵敏度模型。该模型在海水散射系数与衰减系数之比介于0~1的范围内都适用。
由于水下距离选通成像存在噪声大、对比度差、照明不均匀的情况,许廷发等[18]提出了一种对图像采用二维直方图双平台均衡化联合带有估计误差抑制的Retinex(视网膜增强)算法,改善了图像的整体质量,尤其针对简单无突变背景的水下情景时有较为明显的效果。
由于距离选通成像可通过控制激光脉冲和选通脉冲之间的延时对所需测量的空间进行成像,因此,时间与空间之间存在映射关系,利用这种关系可实现三维成像。目前水下距离选通三维成像主要发展了时间切片扫描成像和距离能量相关三维成像技术。中国科学院半导体研究所研制了一系列水下激光三维成像系统,并搭载遥控无人潜水器、自主式水下航行器和深海着陆器等进行了水下试验验证[19]。王新伟等[20]针对水下距离选通成像中由于水体散射干扰、目标反射率差异、极限距离探测等因素引起的二维图像信噪比和对比度下降,三维图像距离分辨率降低,甚至数据出现空洞等问题,开展了水下二维及三维距离选通成像去噪技术研究。
1.2 激光线扫描技术
由于光在水中的传播,不仅会产生吸收损失,而且会产生很大的散射,从而使成像距离变得更短,图像质量也会下降。采用同步扫描技术可以有效地降低水下图像的传输损耗[21]。窄的光束重叠区域和发射端接收端之间的几何间隔非常大,这就导致了接收端接收信号的区域会变得更小,因此也降低了产生干扰的后向散射数目。通过改变两个光束的会聚角度,可以实现对不同距离目标的观测。
1.2.1 技术原理
激光线扫描(laser line scanning, LLS)技术是一种利用准直线阵激光与瞬时视场很窄的接收器同步扫描成像技术。简单来说,就是一个准直线光源对目标视野进行了光束扫描,与此同时,具有非常窄的瞬间视野的接收器也会对目标区域进行扫描[21](如图3所示)。这样的话,接收器只会受到与接收光束重叠的光源反向散射的影响,而在其他位置发生的反向散射则会被阻挡。其介于早期的点激光二维扫描以及距离选通成像之间,相对于点激光扫描提高了成像速度,相对于距离选通成像降低了对激光功率的要求,激光同步线扫描系统接收器常采用光电倍增管或高速成像的条纹管作为成像器件。

图2 从左到右依次为加拿大研制的LUCIE 1~LUCIE3系列产品[13-14]

图3 线扫描示意图[21]
Fig 3 line scan schematic[21]
1.2.2 研究现状
水下激光线扫描成像系统利用扫描光线对目标区域进行测量,通过获得的各扫描点的位置信息,构建目标区域的表面形状。采用这种方法可以获得水下物体的立体影像,其识别效果优于传统的无旋转成像技术。其中最具代表性的就是西屋公司SM2000同步扫描水下激光成像系统[13],该系统通过电动机带动两个扫描镜转动,使发射光束与接收视野同步扫描。在不同的浑浊程度下,成像距离可达2.5~45m,在常用探测距离其分辨率基本可以达到较高水平。目前来说,国外主要将激光同步扫描成像技术用于机载水下探测系统。美国Kaman宇航公司研究的“魔灯”水雷探测激光雷达将线扫描激光器与选通摄像机的同步扫描成像相结合,可实现在450m的最大海面高度左右的探测活动,探测浅水区的最大深度为60m[14](图4)。随后,Kaman公司研制的ALMDS机载激光探测雷达系统被安装在直升机上,可以在12.2m左右深水域情况的快速探测[14](图4)。
Fig 4 “Magic Lamp” mine detection lidar(left) and ALMDS airborne lidar(right)[14]
1996年,华中科技大学进行了激光单点扫描成像试验,其探测深度可以达到为60m;自2009年起,北京科技大学就开始了水下激光线扫描成像技术的理论研究,并成功开发了线激光扫描成像系统;2004年,中国海洋大学研制出了水下激光三维扫描成像系统的工作原理样机[5],并在水中进行了长方形物体的成像试验;采用脉冲激光源和选通型探测器,构成脉冲选通激光线扫描(pulse gating laser line scanning,PG-LLS)成像系统,模拟仿真表明其成像距离可超过7AL。佛罗里达大西洋大学(Florida Atlantic University,FAU)海港分院海洋研究所(Harbor Branch Oceanographic Institution, HBOI)开发了一款脉冲激光线扫描成像系统样机[22],采用光电倍增管(photon multiplier tubes, PMT)及高重频(357kHz)、高功率绿光激光器半峰全宽(full width at half maxima, FWHM)为6~7 ns的高斯脉冲。
1.3 结构光成像技术
结构光[23-24]根据投射光条模式的不同,可以划分为点结构光、线结构光、网格结构光模式等。对光学三角原理最简单直接的应用就是点结构光,操作简便,运算量小,但其每次只能获取单个激光点的三维信息,数据量太小,无法适用于大范围测量以及水下精细作业。网结构光能从单幅摄像机拍摄的二维图像中获取最多信息,提高了三维扫描的范围和效率,但是网结构光操作复杂、实现过程有一定难度。利用结构光成像技术进行三维立体测量时,由于折射的原因,会导致光线的传播路径发生变化,以透视法为基础的线性测量模式已不能满足要求;其次,在水下可视化测量系统的参数校准中,由于所涉及的校准参数远大于大气中的校准数量,这就给系统的校准带来了一定的困难。
1.3.1 技术原理
结构光技术的实质就是利用三角测量法来确定空间目标的三维信息,其普遍是由一台摄像机和一台投影仪组成的结构光系统[25],如图5(a)所示,利用主动投射结构光源的方式在被测目标中人为地增加特征点。在被投射的物体中,由于目标表面起伏的空间位置不同,照相机所拍出的结构光图案会发生相应的变形。结构光成像技术正是利用投影光图形的变形信息来获取三维曲面的形态。

图5 结构光成像示意图[25]
1.3.2 研究现状
与地面测量技术相比,水下照相机在对目标进行摄像时,会产生光线的折射。由于折射具有非线性特性,传统的立体测量模式已不适合在海洋环境中进行三维立体测量。2007年Enrique等[26]在实验室条件下,使用线结构光测量系统扫描测量了水箱中的水下沉积物表面;2012年,西班牙的Mario Prats等在水下结构光系统引导水下机器人-机械手系统作业方面取得进展[27](图6)。

图6 水下自主作业机器人搭载结构光装置[27]
Fig 6 Structured light device for underwater autonomous operation robot[27]
在水下结构光成像研究中,如果忽视了光线的折射效应,往往会导致实验数据出现较大的误差。因此,许多学者在进行水下三维测量时都会将光线的折射效应考虑到测量中[28]。王玲玲[29]采用结构光技术进行水下三维测量,采用修正原理对水下影像进行恢复,最终获得了与大气中近似的影像。但是在对水下成像系统进行校正和三维重构时,由于没有考虑相机自身参数对实验的影响,使得测量数据出现了偏差;乔金鹤[30]、李文莉[31]等人利用结构光技术进行水下三维测量时,将影像恢复与立体匹配相结合,但对于一些失真的影像,不能进行立体匹配;丁万山[32]等人利用水下三维测量系统,利用光线的折射原理,对被测点进行了折射校正;王宗义[33]等人在完成了传统的陆地立体测量之后,采用了激光三角法对水下测量中被测点进行折射补偿。
随后又有人对结构光成像做了相应的优化,提出了距离补偿型以及合成孔径照明型结构光成像。①距离补偿型:当使用结构光照明时,一束窄激光束被投射到场景中,且投射方向偏离相机的中心光轴,能部分消除后向散射光成分,有助于通过三角测量法恢复场景的3-D结构。2005年Narasimhan[34]等提出了两种具有创新性的补充:结构光成像中的扫描并没有任何主要运动部分,而是由使用数字光处理投影仪的空间光调制器控制;其次当恢复目标亮度时,对水体衰减进行了补偿。②合成孔径照明:Levoy等[35]2004年提出了一种将背景目标与其前景后向散射光分离的方法(图7)。该方法基于照明光源群,且每个光源均以独特的位置和方向照射场景,而以往几乎所有结构光成像方法均基于来自同一方向的照明。
1.4 散射光计算成像技术
计算成像技术[36]是一种新型的系统成像方法,它不同于传统的“看见什么就是什么”。随着计算机的运算能力不断提高,计算机图像处理技术正逐渐成为一种新兴的技术。计算成像技术是通过收集和处理光场的信息,实现了传统成像技术所难以兼顾的高分辨率、远探测距离、大光学视野的要求。

图7 水下合成孔径成像实验装置[35]
1.4.1 技术原理
总的来说,只要在成像过程中引入了某种计算方法,就都可以被看作是一种计算成像。它其实就是通过计算机的强大的运算能力,间接或者直接地参与到成像中去,从而达到改善成像的效果[36],其大致流程如图8所示。而从具体某个方面来说,则是利用信息的获取、传递和解释来描述光场,这是一种全新的图像处理模式,它将光学、数学和信号处理结合在一起,它将彻底改变以图像为中心的光学图像只依赖于有序的信息传递,在光场维度上扩大信息的获取、利用和编译能力,从而进一步提高光电成像的上限。
而在水下成像条件时,由于光子随机传输问题,并不能在这些区域中直接获得目标信息,获取到的是由散射光产生的无规律分布的散射光场,散射光成像技术就是通过对这些携带隐藏目标信息的散斑图像进行深度解译,复原出清晰目标信息的一种成像技术。主要有基于波前整形的散射光成像复原清晰目标图像。
1.4.2 研究现状
2007年VELLEKOOP. I. M[37]等首次提出基于波前整形的散射光成像技术,该方法包括基于反馈的波前整形、传输矩阵(transfer matrix,TM)测量和光学相位共轭(optical phase conjugation, OPC)3部分。
基于反馈的波前整形成像技术通过反馈算法调控空间光调制器(spatial light modulator, SLM),以此补偿入射波前,同时结合光学相位共轭实现在散射层后聚焦成像[38],其实验装置及成像效果如图9所示,当光束通过强散射介质时,散射层后每个位置的相位随机分布,形成一幅散斑图像(如图9(b)所示),而当引入反馈信号后(如图9(c)所示),散射层后目标的亮度比散斑图像高出3个量级,聚焦效果远远优于光学透镜。2010年VELLEKOOP. I. M等[39]基于反馈的波前整形成像技术在传统光学系统后放置一个厚度为6mm的散射介质,利用该方法获得的光斑直径为传统成像的1/10,光学系统的分辨率得到了极大提高。2012年,KATZ. O等[40]基于反馈的波前整形方法采用非相干光源实现了实时透散射介质成像,其成像效果如图10所示,极大推动了基于反馈的波前整形技术的工程化应用。

图8 计算成像流程示意图[36]
Fig.8 Schematic diagram of imaging process calculation[36]
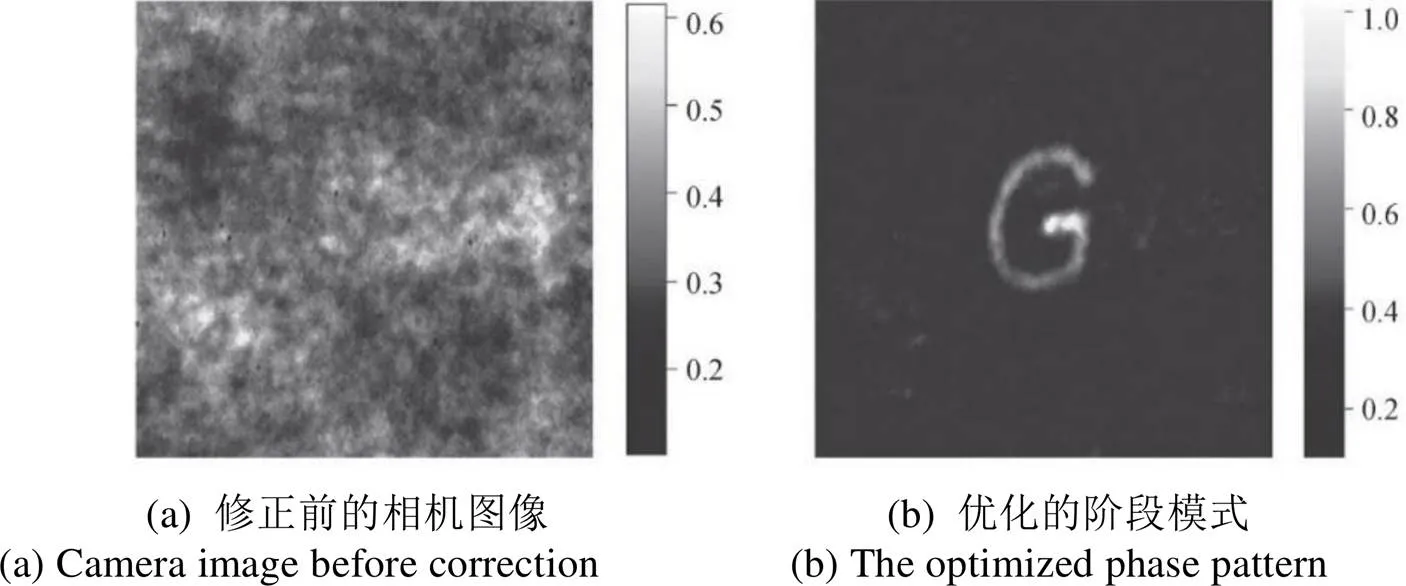
图10 非相干光源成像效果[40]
Fig 10 Imaging effect of incoherent light source[40]
基于散射介质传输矩阵测量的方法由POPOFF. S首次提出[41],如图11所示。其原理主要是入射光场通过复杂矩阵与出射光场相联系,测量这个复杂矩阵并结合OPC技术可实现任一位置、任一时刻聚焦成像。目前测量TM的方法有四步相移、相位恢复算法等。2015年,LIUTKUS S.等[42]在TM测量中引入压缩感知思想,大幅降低传输矩阵的测量难度。同年,ANDREOLI D.等[43]提出一种不同波长下测量TM的方法,该方法通过建立三维多光谱TM解决了宽谱聚焦成像问题。对于多光谱研究,2019年DONG. J等[44]采用了多路复用相位反演的方法成功实现透散射介质成像,其单点聚焦如图12所示。

图11 基于光学传输矩阵的散射光成像[41]
基于光学相位共轭的散射光成像技术是指利用浑浊介质的互易性和发生时间反转时光路不变的性质,从反向光路获得原始入射光场信息的技术[45],其原理如图13所示。与基于反馈的波前整形技术相比,该方法中的可测量信道数并非单信道而是多个信道,使得该技术可用于实时测量。
1.5 偏振光成像技术
偏振是光的一种内在特性,它可以反映出目标的许多物理特性,并能检测到一般的光学图像所不能察觉的信息。偏振成像探测技术还具有抑制介质杂散光、降低背景干扰、实现被测对象景物复原、获得被测对象的有效信息等优点。
1.5.1 技术原理
偏振成像是在实时获取目标偏振信息的基础上利用所得到的信息进行目标重构增强的过程,偏振信息与传统成像中获取的信息是有所不同的,它是把图像的信息从光强度、光谱、空间扩展到多维(偏振度、偏振角、折射率、表面粗糙度等)[46-47]。与传统成像方法比较,偏振成像方法能够灵敏且精确地获得目标的更多信息,例如:玻璃表面的缺陷极不易检测,当偏振光打入玻璃中,由于玻璃不是均匀的,受到各个方向的扭曲和压力,这样内部分子的结构就会有所不同,所以玻璃的表面缺陷就可以被显示了出来了[48](图14中所示)。近年来,由于偏振检测技术的不断发展以及偏振散射的基础理论的不断发展,使得偏振成像技术在水下光电成像领域受到了重视。
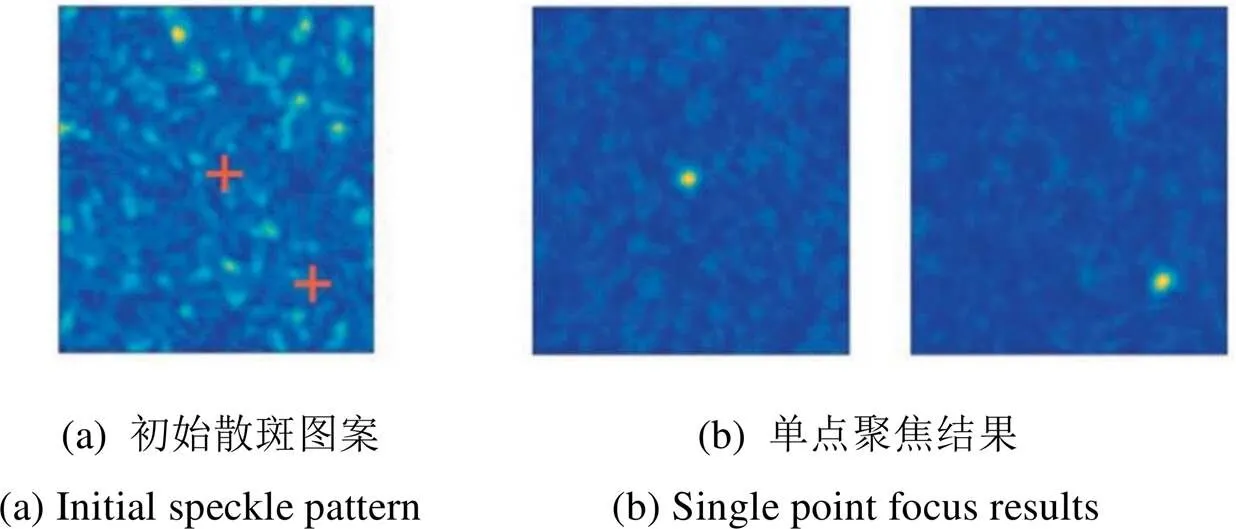
图12 透复杂散射介质实验结果[44]

图13 基于光学相位共轭的散射光成像技术[45]
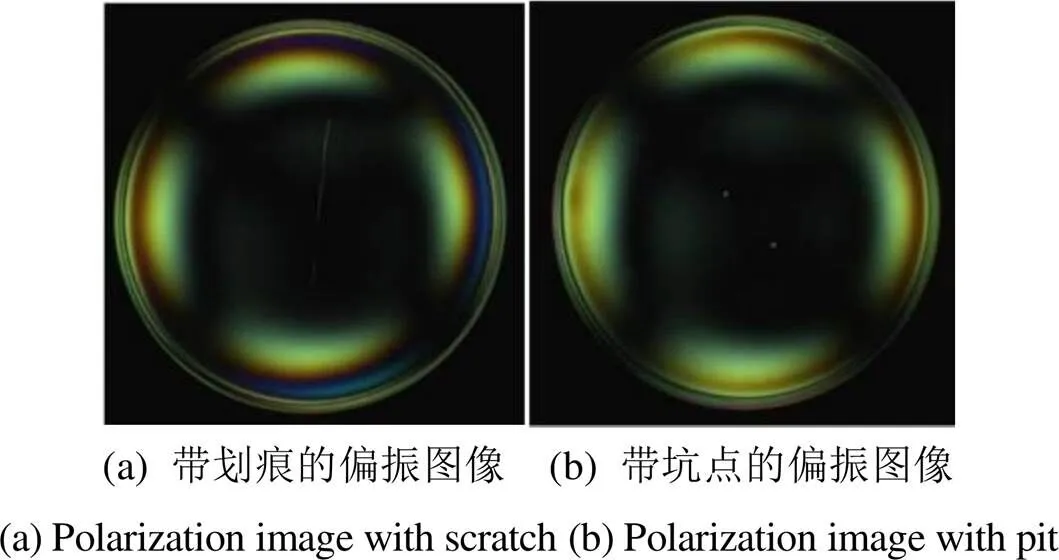
图14 玻璃的缺陷图像[48]
1.5.2 研究现状
水下偏振成像技术通过对背景散射光进行抑制,利用目标信息与背景散射光的偏振度差异得到清晰的复原图像。目前典型的水下偏振成像技术[49]主要包括:水下偏振差分成像、被动水下偏振成像以及主动水下偏振成像等。
由于动物视觉可以获得和解码正交偏振信息,因此在1995年ROWE M. P.等人[50]受此启发提出了一种基于偏振差分的成像技术,这项技术是将偏振装置置于探测器前端,以获得沿偏振方向相互正交的景物,并利用偏振图像的差值消除背景散射,从而实现对景物更加清晰的检测。偏振差分成像可以解译原始强度图像中不易看到的细节信息,如图15所示,提高了水下成像的探测能力,为水下成像提供了新的技术思路。
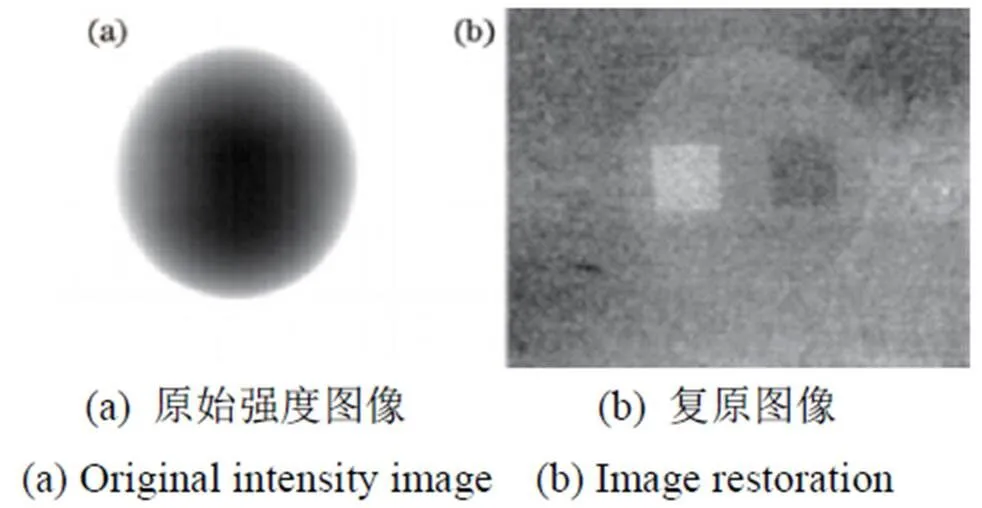
图15 原始强度图像与复原图像的对比[50]
在光照条件较好的情况下,由于主动光源和自然光的重叠会影响偏振信息的精确采集,因此,被动成像的优越性就凸显出来了。Schechner于2005年[51]首次提出了水下被动偏振成像,其主要用于在白天和日光能到达的浅水区消除散射光效应,并解决了由于水体的吸收而导致的彩色失真。2016年,黄等人[52]提出了基于目标光的水下被动偏振成像,并对其与正交差分信号之间的转换关系进行了分析,从而解决了高偏振性图像恢复失败的问题。2017年,胡等人[53]根据目标的偏振特征,提出了一种利用透射比修正的水下无源偏振成像技术。刘等人[54]针对传统的水下偏振法在水下摄像过程中因水体吸收而产生的颜色失真的问题,利用获得的背景散射光强分析出场景深度信息,并构造出水下朗伯体(Lambertian)反射模式,使水下物体成像清晰,不会产生颜色失真,从而大大提高了水下检测和识别的性能,如图16所示。相对于常规的水下偏振成像,水下被动偏振成像具有更广泛的应用前景,但是在高浑浊的水体中,其成像性能还需进一步提高。
被动水下偏振与主动水下偏振成像的不同之处在于:在水下被动偏振成像中,自然光在水中受到吸收和衰减而变为局部偏振光;而在水下主动偏振技术则是利用完全偏振光源来实现成像,因为水体对入射光的吸收与散射,使完全偏振光转变为部分偏振光。
在深海地区,通过采集目标和背景的偏振信息,再利用目标与背景之间的偏振度差异,就可以获得被测目标的偏振信息,从而获得清晰的成像效果。近年来,越来越多的学者深入地研究了水下主动偏振成像技术。2018年,韩平丽[55]提出了一种基于图像边缘法估计正向散射光衰减函数的算法,则可以有效地克服由于正向散射光线造成的图像劣化问题,极大地改善了图像的显示效果,使景物变得更加清晰。随后,又在此基础上,提出了一种基于频谱和空间特征的多尺度水下偏振成像方法,将一张偏振影像分成具有高反差的基础层和低反差的细节层,采用联合双边滤波来降低基本层的噪声,从而实现对模糊图像的复原[56](如图17所示)。

图16 成像效果对比图[54]:(a) 字母“XiDian UNIVERSITY”的原始图像;(b) 字母“XiDian UNIVERSITY”的被动水下偏振成像方法的结果;(c) 地中海的原始图像;(d) 地中海被动水下偏振成像方法的结果;(e) 图(d)中A区域的放大结果;(f) 图(d)中B区域的放大结果
Fig 16 Comparison of imaging effects[54]: (a) The original image of the letters"XiDian UNIVERSITY"; (b) The results by passive underwater polarization imaging method of the letters" XiDian UNIVERSITY" ; (c) The original image of the Mediterranean ; (d) The results by passive underwater polarization imaging method of the Mediterranean;(e) The enlarged result of area A in Fig (d);(f) The enlarged result of area B in Fig (d)
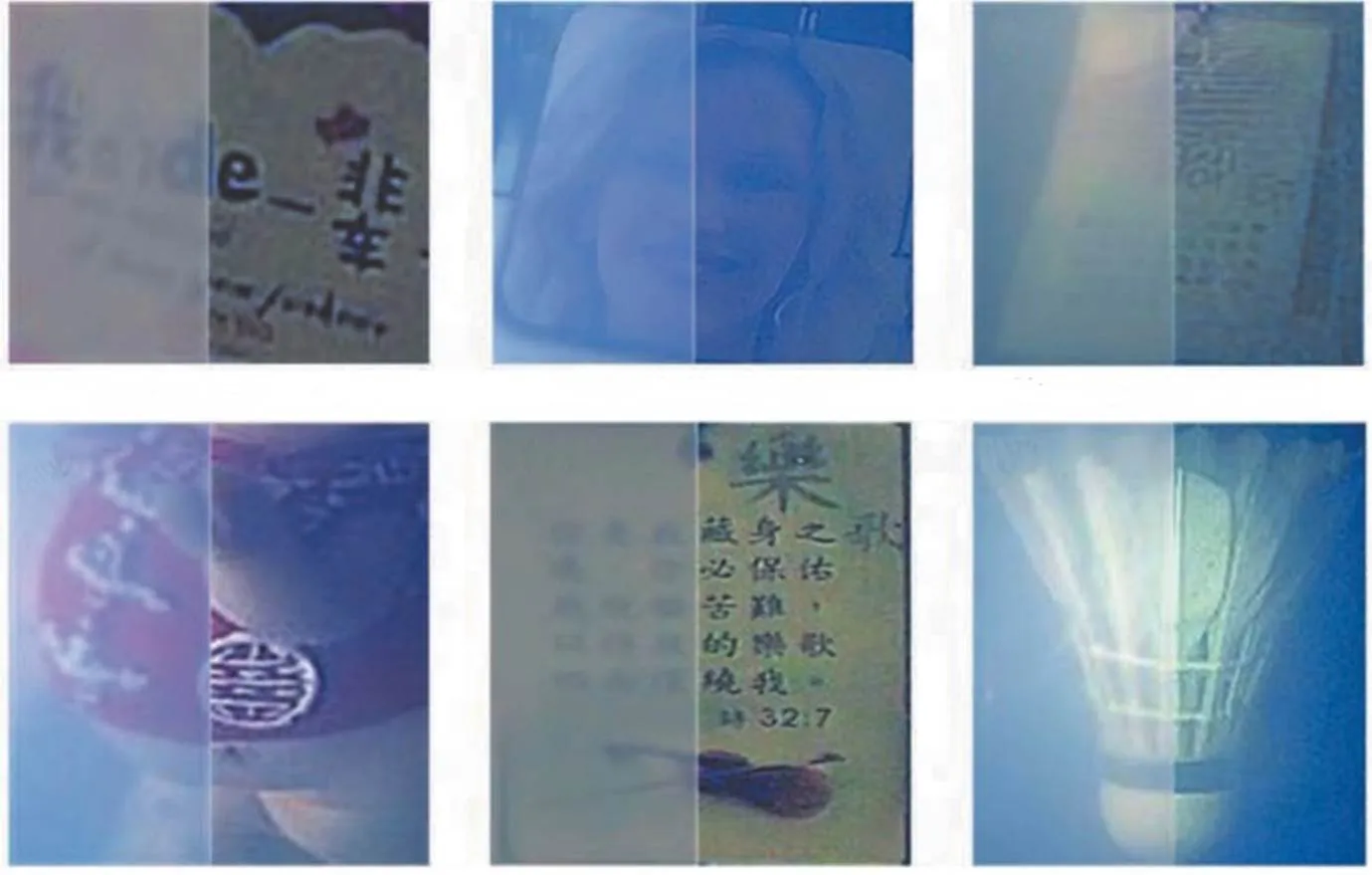
图17 不同目标复原效果(每张图片左半边为原始图像,右半边为复原图像)[56]
1.6 水下鬼成像技术
由于水下探测时受到吸收、散射、湍流等因素的影响,传统的成像技术很难得到清晰的水下影像。而水下鬼影成像在浑浊、可见度极低的水下环境中具有克服这种局限性的特殊优势,与常规成像技术相比,鬼成像有如下特点:①实现了物像的分离;②实现了强度信息的关联,具有更强的抵抗恶劣天气等干扰的能力;③突破了衍射的极限,具有超高分辨率。在弱光、特殊波段和增加成像距离上具有明显的优越性。
1.6.1 技术原理
解释“鬼成像”之前,我们不妨先了解一下“人成像”。人类90%的信息都来源于视觉,即由物体自身或其反射的光线在我们视网膜上形成的影像。而人眼的晶状体就像是透镜一样,可以在目标和“所见”之间形成一个个点和点的对应。
“鬼成像”作为量子光学的一个重要分支,它的最大特点就是物像分离。它的成像系统主要包括两条光路,一条是基准光路,通过空间分辨率检测器采集被测对象的信息,而另外一条是信号光路则通过没有空间分辨率的桶式检测器采集被测对象的信息,通过两个路径的相关运算,最终可以得到被测对象的图像[57](如图18)。量子成像能利用两个探测光路分别对物体的空间分布和强度分布进行探测,其中任何一路信息都无法单独成像,唯有两路信息共同探测,才能通过测量进行关联成像。这就好比我们在室外安装一个探测器后,只需要在室内再配置一个探测器进行采样,就可做到“不出门而尽知门外事”仿佛幽灵般洞察着外面的事物。正是这种打破常规的方式,才使得量子成像得名“鬼成像”。

图18 传统鬼成像原理[57]
1.6.2 研究现状
1988年,前苏联莫斯科国立大学Klyshko D. N.[58]提出了一种由亚稳态原子或非线性晶体发射的双光子宽带辐射,来实现双光子关联成像的目的;1995年,Pittman等人利用自发参量下转换产生的纠缠光子对[59](实验装置如图19所示),首次在实验上观察到鬼成像,进而证实了量子鬼成像的有效性;2001年,波士顿大学的Abouraddy[60]提出了一种分布式量子成像系统,其中一个光子用于探测远程透射或散射物体,而另一个用作参考,进一步证明了量子纠缠是实现量子成像的先决条件,由此引发了人们用经典光源实现鬼成像的实验研究和理论探讨。
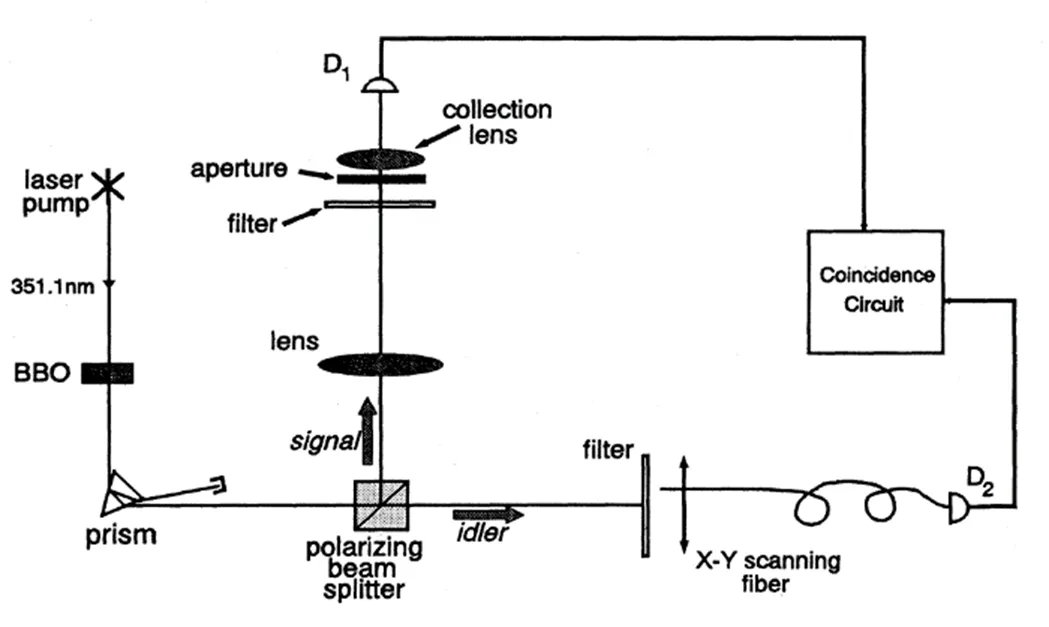
图19 双光子光学成像实验装置示意图[59]
由于鬼成像首先是利用具有纠缠特性的光子对完成的,所以早期很多科学家错误地认为只有具有量子的纠缠特性,才能实现鬼成像,并认为这是一种量子效应,直到2002年,情况才发生了很大的转变。R. S. Bennink等[61]基于光场的二阶强度关联函数,利用随机指向的激光束首次实现了热光的鬼成像。证明了量子纠缠不是实现鬼成像的必要条件,而是基于经典光场的强度(即光强)时空涨落和关联。而且热光源更加容易获得,而且数据处理相对也简单,因此热光鬼成像实际应用更加广泛。
2017年,西安交通大学Le等[62]针对水下长距离和不同角度条件下的计算鬼成像(computational ghost imaging, CGI)进行了实证研究(系统原理如图20所示),与此同时还对海洋环境进行了广泛的模拟。实验结果验证了计算鬼成像对水中浊度的变化不敏感。通过计算鬼成像获得的重建可能比经典的光学成像方法更理想;2018年,罗等[63]基于鬼成像(ghost imaging, GI)理论,利用海水折射率的空间功率谱,建立了在海洋湍流中运行的CGI和计算鬼衍射(calculation of ghost diffraction, CGD)的统一成像公式,并分析了图像质量会受到海洋湍流的影响;2019年,张等[64]针对高散射海水介质中目标成像的问题,使用了黑色墨水来增加海水对光的散射,通过二阶相关函数分析了衰减对水下鬼影成像的影响。在不同浊度的海水通道中进行了伪热鬼成像实验。实验结果表明,即使在CCD的低照度水平下,微分鬼成像的成像质量也相对较好,应用压缩感知的方法可以显着提高水下鬼影成像的质量。由于衰减系数越大,就相当于光在水中的传输距离越远,鬼影成像可能是远距离水下成像的有效方法。此外,鬼成像对散射不敏感,因此具有在多变和恶劣的海洋环境中探索的优势。
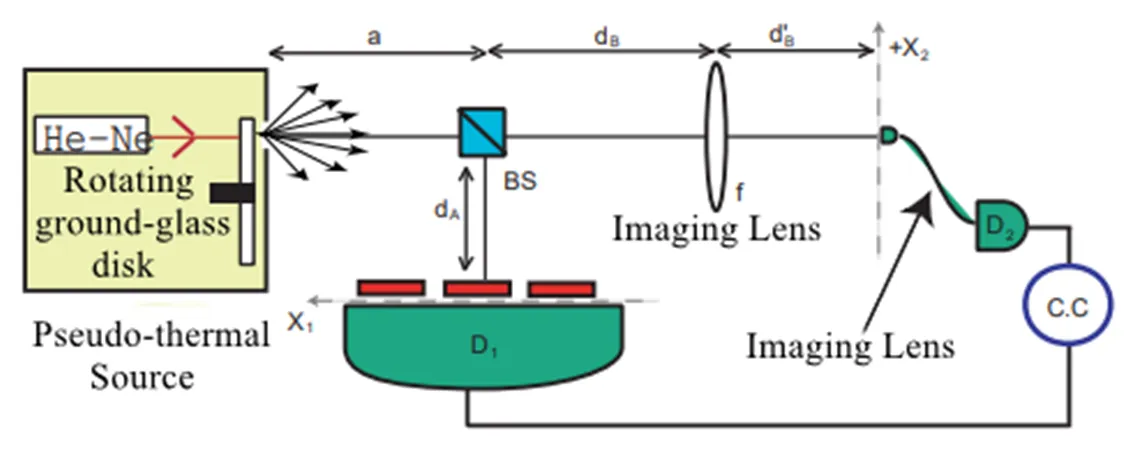
图20 计算鬼成像实验装置示意图[62]
1.7 基于深度学习水下成像技术
由于数据量的增加、计算能力的提高、学习算法的日趋成熟、应用场景的不断增加,人们对这种“崭新”的处理方式——深度学习产生了浓厚的兴趣。深度学习是基于神经网络的,它最初是为了解决机器学习中的表达式学习问题而设计的。然而,由于其强大的性能,使得它被应用于许多常规的水下光电图像中去解决一些棘手问题。基于深度学习的水下光电成像技术不仅需要经过缜密的数理分析进行设计,并且要有相应领域的理论依据。
1.7.1 技术原理
深度学习是机器学习的一个重要研究方向,它旨在通过建立神经网络来模拟人类大脑进行分析学习,并模仿人类大脑的工作原理,实现对图像、声音和文字等信息的解读。深度学习是基于神经网络的一种新的模式[65-66],它包含了多层的隐层感知器(图21),这些感知器可以将底层的特征结合起来,得到更高层次的描述,从而发现数据的分布特性。它具有功能强大、适应性强、结构简单等优点,在数据分析、图像识别、趋势预测、机器翻译、机器博弈等方面都有广泛的应用。深度学习不仅可以提供不依赖任务类型的通用程序算法,而且还具有极高的泛化性能(从已有的数据中获取适合所有情况的知识)。
随着深度学习技术的不断发展,许多学者选择用深度学习来解决散射光成像中的有关问题。如果将传统散射光成像看作是一个前向传播过程,则基于深度学习的散射光成像就是一个逆向的求解过程,通过建立合适的神经网络,根据输出的光场强度得到输入的光场信息。
1.7.2 研究现状
2015年,ANDOT等[67]在散射成像中首次引入深度学习,利用支持向量机对采集的人脸数据和非人脸数据的散斑强度图进行了分类。2018年,LI Y.等[68]对不同散射介质的散斑图进行训练,其网络结构可自主利用训练数据中的统计特征实现不同类型物体和不同散射介质下的物体图像恢复。2019年,LYU M.等[69]建立混合神经网络(hybrid neural networks, HNN)模型,在强散射介质中实现对隐藏目标的恢复,如图22所示,HNN重建结果与原始图像相似,而在相同条件下基于光学记忆效应的重建结果并不能恢复出图像。实验结果也表明基于深度学习的散射光成像恢复范围比光学记忆效应范围广。深度学习中通过训练好的神经网络重建图像需要系统保持恒定,考虑实际应用,需要训练出能对多个散射系统适用的神经网络。2021年,华侨大学LAI等人[70]在不同种类物体和不同种类散射介质的恢复问题中引入迁移学习思想,通过训练来自多模光纤(multimode fiber,MMF)的数据,将其迁移至散射介质,从而实现不同物体、不同散射介质下的图像恢复。
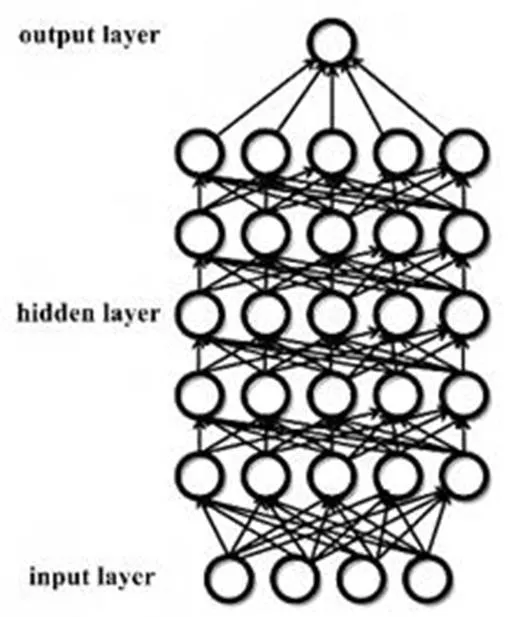
图21 含多个隐层的深度学习模型[65-66]
Fig.21 Deep learning model with multiple hidden layers[65-66]
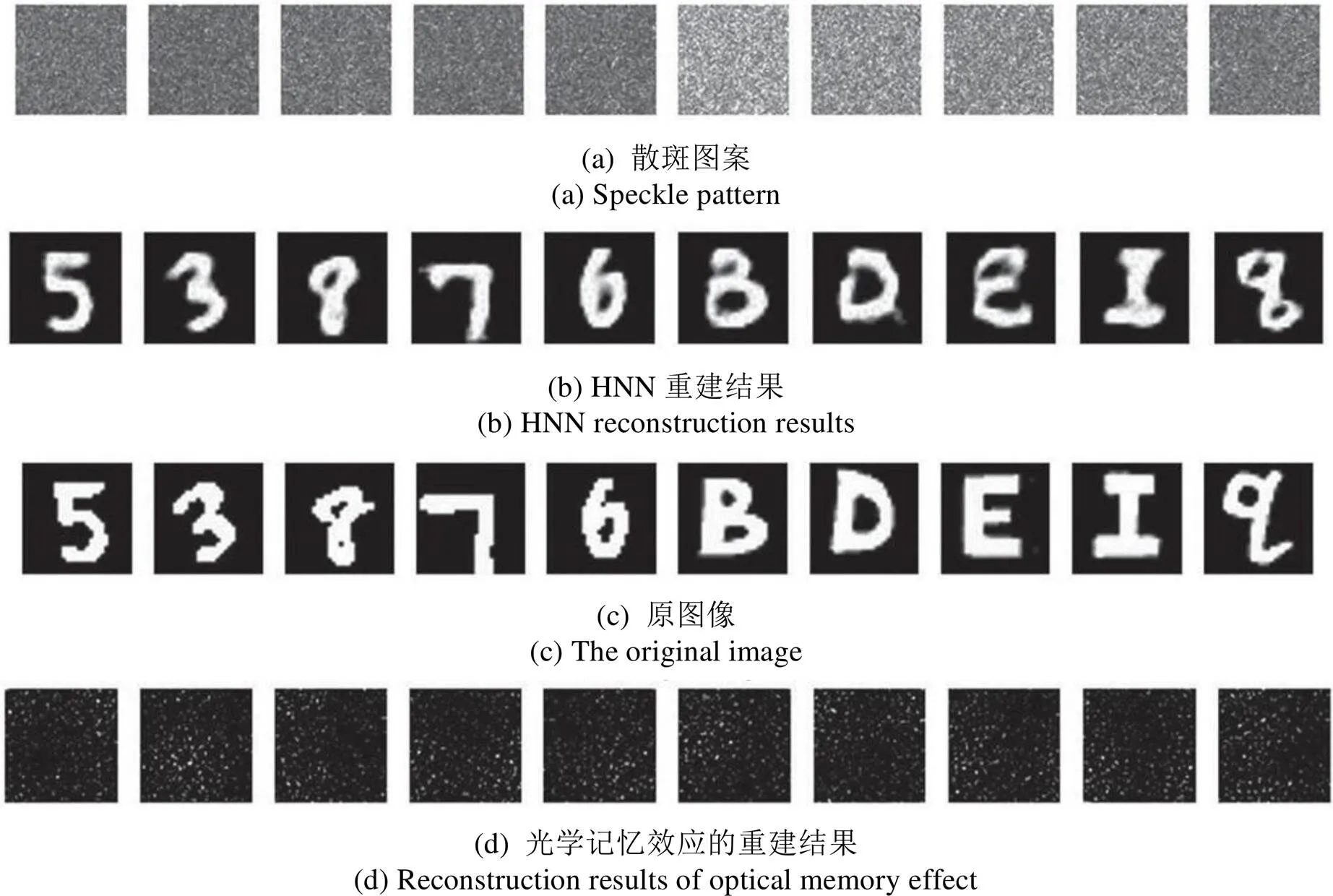
图22 字符重建结果[69]
相比于传统散射光成像,基于深度学习的散射光成像表现出极大的优势,通过强度测量即可实现透散射介质成像,且在强散射介质情况下能够获得较大视场的成像等;但该方法仍然存在不足之处,深度学习并不能解释光在散射介质中传播的物理规律,计算耗时较长、成本高、灵活性较弱,此外,训练较好的网络对其他系统并没有很好的适应性,网络结构不能根据成像环境的改变而自动调整参数。
1.8 各种水下成像技术的对比
目前,水下光电成像主流技术包括:距离选通光电成像技术、激光同步线扫描技术、结构光成像技术、多视角图像重构技术、散射计算光学技术、偏振光成像技术、水下鬼影成像技术以及基于深度学习水下成像技术等。经过对上述主流光电成像技术的原理及发展的阐述,再进一步归纳总结了各种水下光电成像技术的优缺点,如表1所示。
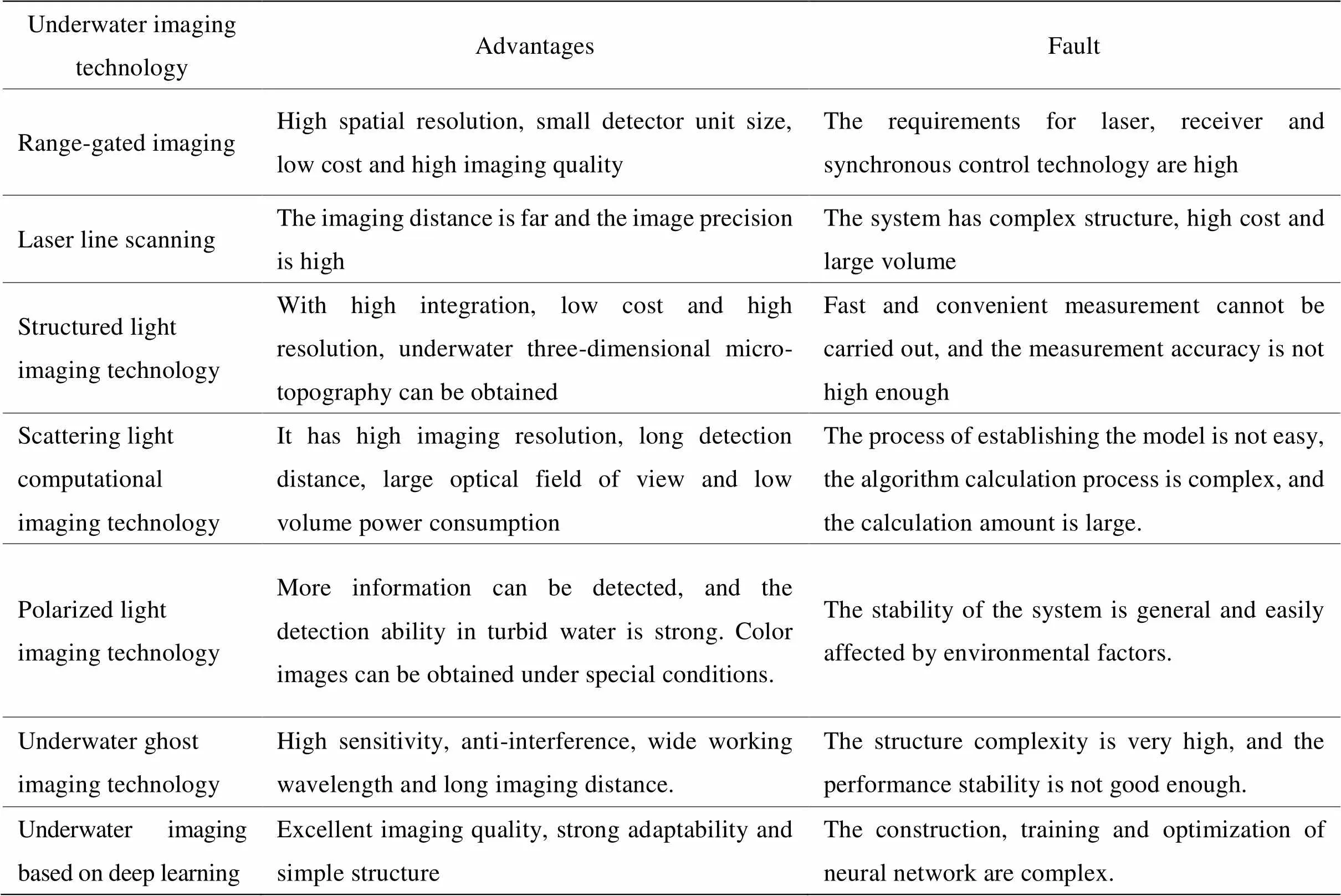
表1 各种水下光电成像技术的对比
2 探测器对比分析
经过对上述参考文献中采用的各种水下光电成像系统/探测系统分析可知,在激光线扫描技术(LLS)系统的接收器一般采用光电倍增管或高速成像的条纹管作为成像器件;双光子量子纠缠中一般采用干冰制冷的盖革模式的雪崩光电二极管作为探测器记录信号信息;在水下鬼成像系统中一般采用桶探测器进行单光子探测;在水下低照度高灵敏度鬼影成像系统中一般采用了CCD作为探测器;通过深度学习的散射介质压缩鬼成像的探测器一般采用单光子探测器(single photon detector, SPD);基于多尺度生成对抗网络的计算鬼成像系统中一般采用光电倍增管;瞬时鬼成像中为了降低背景噪声提高鬼成像的鲁棒性,首先对532nm的激光进行分束,然后用两个CMOS器件分别作为参考探测器和甄别探测器,然后采用算法进行降噪;基于阵列采样的计算鬼成像系统中为了提高成像质量和响应速度慢的问题,采用计算鬼成像方法与多个不同规格的阵列传感器进行采样相结合的方法取得了较好效果;基于生成对抗网络的水下鬼成像中采用生产对抗性网络的方法提高图像质量,在探测器中一般采用多层阵列型探测器组成探测器组解决水下光能量低,探测难度大的问题。
总体来说,探测器主要有非成像型探测器和成像型探测器两大类。其中,非成像型探测器包括光电倍增管、雪崩光电二极管、单光子探测器,成像型探测器包括微光像增强器、电荷耦合器件(charge coupled device, CCD)和互补金属氧化物半导体(complementary metal oxide semiconductor, CMOS)等。
光电倍增管[71]是一种真空玻璃管,由入射窗、光阴极面、倍增系统和阳极等部分组成,如图23所示。光透过入射窗后到达光阴极面,由于光电效应光子转换为电子,经过聚焦电极和各倍增极后实现电子倍增(二次电子倍增),最后由阳极输出电流信号。光电倍增管的灵敏度、暗电流、响应时间、增益及线性度都表现得极其优秀,但是由于光电倍增管的结构特点,其电子倍增部分尺寸较大而且电子倍增过程中还需要高电压,使其不利于水下探测器件的集成化。

图23 传统光电倍增管结构图[71]
Fig.23 Structure diagram of traditional photomultiplier tube[71]
雪崩光电二极管[71]是具有内部光电流增益的半导体光电子器件,其工作原理如图24所示,光生载流子在二极管耗尽层内的碰撞电离效应而获得光电流的雪崩倍增。但是载流子在耗尽层中获得的雪崩增益越大,雪崩倍增过程所需的时间就越长。因此雪崩光电二极管在高增益情况下,往往灵敏度和响应时间就表现得一般。其次由于其暗电流较大会引入更多的噪声,进而影响最终的成像质量。

图24 雪崩光电二极管工作原理[71]
单光子探测器[71]是一种对微弱光信号进行探测的设备,输入光强度最低可到单光子水平,一般应用于信号强度仅为几个光子能量级的探测中。其工作原理是利用工作于盖革模式下的InGaAs/InP雪崩光电二极管进行单光子探测。单光子探测器在水下探测时有着不错的灵敏度、响应时间以及增益,但是也会给系统带来不小的噪声。微光像增强器[71]的工作原理如图25所示,微弱光射在光电阴极上发射出光电子,光电子经过偏置电压加速后进入微通道板,高速电子射到微通道板内壁时,连续与内壁体内电子碰撞使电子受激而逸出表面,形成倍增电子,倍增后的电子撞击荧光屏转化为光子,即电子转化光子。由于其光阴极产生的光电子是信号源,因此在倍增过程中实际上是对信号进行了倍增,噪声没有倍增,因而具有较高的信噪比,其光阴极响应很快,光阴极灵敏度高,在微弱光探测成像方面具有明显优势,在国内外水下探测成像领域中均有应用,各项性能指标均表现得不错。
CCD与CMOS传感器[72]是当前被普遍采用的两种图像传感器,两者都是利用光电二极管进行光电转换,将图像转换为数字数据,而其主要差异是数字数据传送的方式不同。CCD传感器中每一行中每一个像素的电荷数据都会依次传送到下一个像素中,由最底端部分输出,再经由传感器边缘的放大器进行放大输出[71],其工作原理可以通过如图26所示的模型表示;而在CMOS传感器中,每个像素都会邻接一个放大器及A/D转换电路,用类似内存电路的方式将数据输出。使用过程中每个像素中的光电二极管同时又充当了电容,无光照时电容会释放电荷从而产生暗电流。
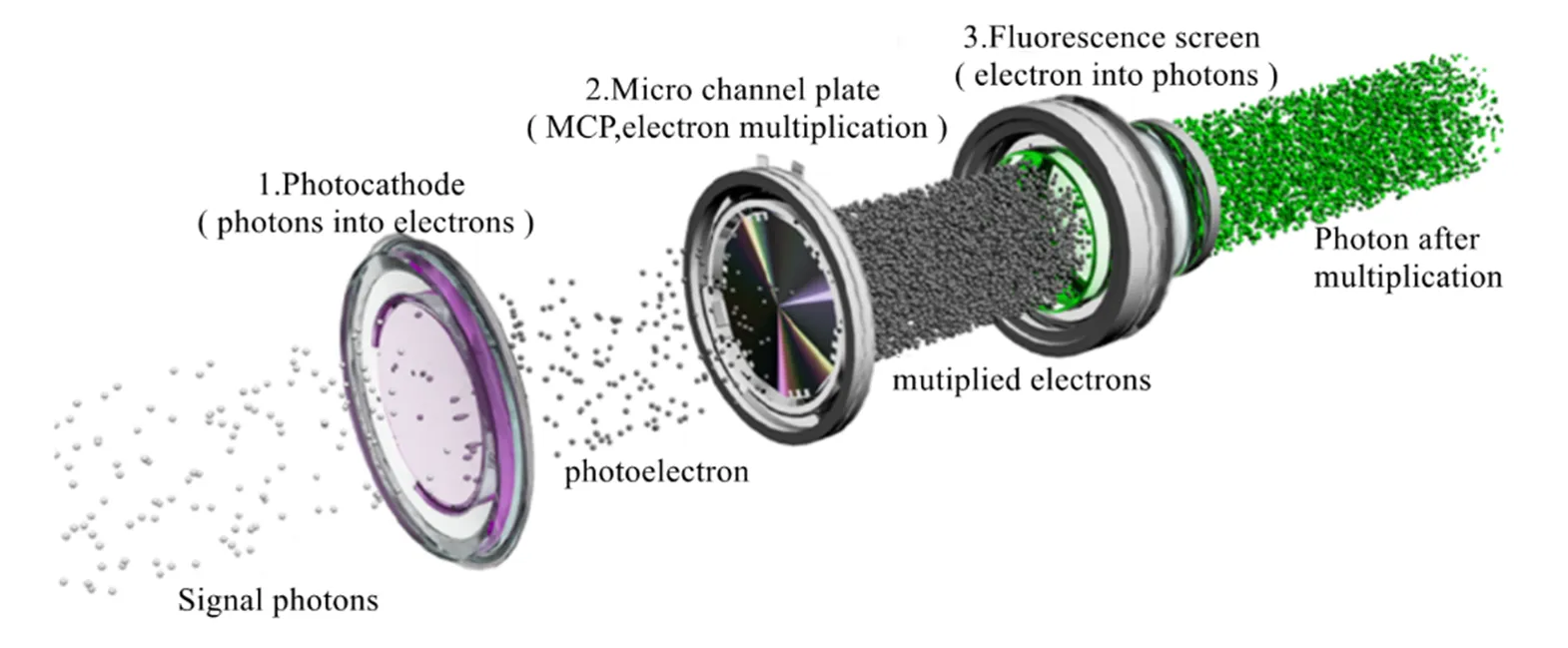
图25 微光像增强器工作原理[71]

图26 CCD工作原理模型[71]
针对探测器所需具备的性能要求,通过对探测器工作环境分析可知:①水下对波长在530nm附近的蓝绿光吸收较弱,即在此波段透过率较高,所以就必须要求探测器在530nm波长处具有较高的灵敏度;②水下蓝绿光信号比陆地上还微弱,因此还应具备高分辨率、低噪声、高增益的特点,即能够实现在保证低噪声的同时下获得较好的增益效果;③探测器应具备较宽范围的、良好的线性度,以及较快的响应速度,即在一个较宽的变化范围内能够实现输入光照增加,输出图像或信号的迅速成倍增加,从而实现对微弱信号的探测成像。据此,可以得出结论,探测器需要具备高速外触发功能、高分辨率、高灵敏度、低噪声、足够的增益动态范围。综合上述各种水下光电探测器的性能,对比分析如表2所示。
为了获得较高成像质量且便于集成化,可以选择微光像增强器作为水下光电成像探测器。目前常用的像增强器一般为三代微光像增强器和超二代微光像增强器,这两种微光像增强器在波长532nm处的量子效率通常只有10%~20%,但是如果更换光阴极材料为GaAsP材料[73],波长532nm处的量子效率可大大提高。GaAsP基于外光电效应原理工作,具备响应速度快、噪声低的特点,且直径18mm有效面积的GaAaP光阴极光谱响应0.4~0.8mm,在0.53μm波长处量子效率达到58.8%,采用GaAsP光阴极制作的微光像增强器积分灵敏度达到1600mA/lm,分辨率达到50lp/mm,该类像增强器高蓝绿光响应既适用深海目标探测,宽光谱响应又适应于长波范围浅水目标探测。根据作用距离的前人经验公式可得出结论,微光像增强器水下光电成像的作用距离可以大大提升。
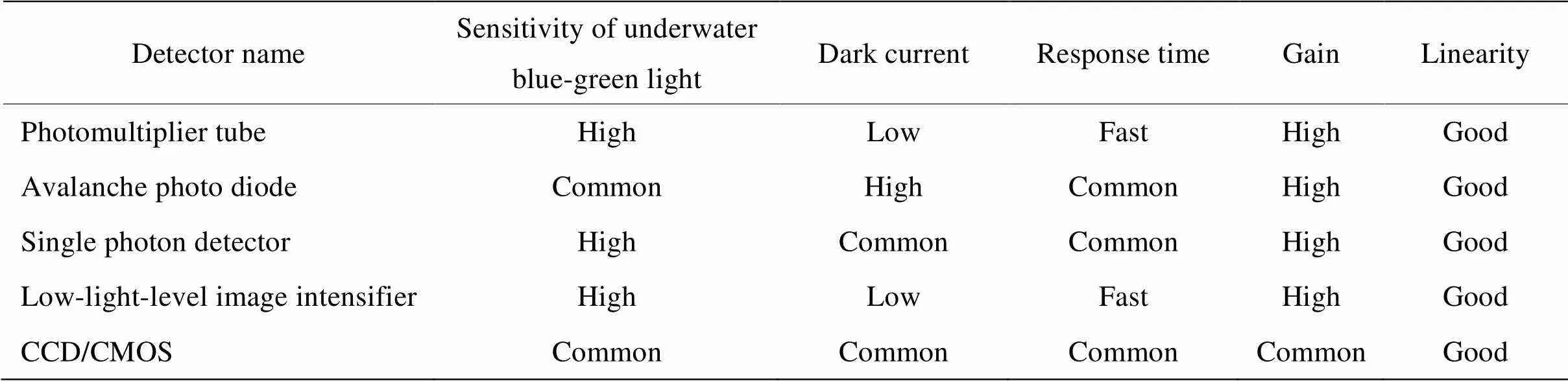
表2 各种水下光电成像/探测系统的探测器的对比分析
通过改变光阴极电压、MCP输出端电压对单MCP和双MCP微光像增强器的辐射增益分别进行了测试分析,双MCP像增强器的辐射增益会比单MCP像管的辐射增益高100倍[74]。如果引入双微通道板技术就能够实现电子增益达到104~106量级,从而实现高增益特性。再通过技术优化可以显著提升微通道板的线性度和动态范围,从而可达到了水下探测成像系统对探测器应该具备的低噪声、高灵敏度、高增益、高线性度的特性要求[73-74],可以预测GaAsP光阴极双微通道板像增强器会成为未来水下探测器发展的一个重要方向。
3 结论
水下光电成像技术以其分辨能力高、直观快速地传递目标与景物的二维乃至三维信息,且输出图像更符合人的视觉与心理特征等特点具有广泛的应用需求。由于光在水中散射强,水下光电探测需要多维度探测光场信息且需要使用高性能的探测器才能实现更远距离、更清晰、实时成像。其中,主动距离选通利用微光像增强器探测照度阈值低、响应速度快的特点,可实现水下快速高质量成像;水下偏振成像探测利用目标和背景之间偏振差异,可以解析出更多的目标信息;水下鬼成像利用光场二阶相关性成像,抗干扰能力强、水下探测距离远但需要双光路,使用不便;计算成像通过保持物体光束并利用计算的场模式来使得成像质量更佳。各种水下光电成像技术都各有其特点,可以将各个成像技术相互借鉴相互融合,可以利用主动式距离选通微光成像技术搭配水下目标偏振特性主被动探测或者计算鬼成像方式,最后由具有高速解算能力的深度学习计算系统解算目标信息也许会成为未来水下实时、远距离、高分辨力成像的技术实现途径之一。
为了提高成像质量且易于集成,可以采用微光像增强器作为水下光电成像探测器。蓝绿光敏感GaAsP光阴极双微通道板像增强器光谱响应匹配水下透射窗口,波长530nm处量子效率远远优于目前常用的三代与超二代微光像增强器,且其积分灵敏度、分辨率均达到了较高水平。蓝绿光敏感GaAsP光阴极双微通道板像增强器具备低噪声、高灵敏度、高增益、高线性度的特性要求,既适用深海目标探测,宽光谱响应又适应于长波范围浅水目标探测,建议可以将其应用到水下成像领域。
[1] 曾晓光, 金伟晨, 赵羿羽, 等. 海洋开发装备技术发展现状与未来趋势研判[J]. 舰船科学技术, 2019, 41(17): 1-7.
ZENG Xiaoguang, JIN Weichen, ZHAO Yiyu, et al. Current situation and development of marine development equipment technology[J]., 2019, 41(17): 1-7.
[2] 吕文磊, 张旭, 刘可. 一种距离选通水下激光成像系统设计与实验研究[J]. 兵器装备工程学报, 2019, 40(8): 198-202.
LV Wenlei, ZHANG Xu, LIU Ke.Design and experimental study on a range-gated underwater laser imaging system[J]., 2019, 40(8) : 198-202.
[3] 姜朝宇, 罗涛, 王亚波, 等. 水下线状目标距离选通成像探测研究[J]. 舰船科学技术, 2018, 40(19): 130-134.
JIANG Chaoyu, LUO Tao, WANG Yabo, et al. Experimental study on underwater linear objects detection using underwater range gated imaging method[J]., 2018, 40(19): 130-134.
[4] 王书宇, 艾磊, 陶声祥, 等. 便携式远距离激光选通成像系统研究[J]. 兵器装备工程学报, 2018, 39(9): 166-170.
WANG Shuyu, AI Lei, TAO Shengxiang, et al. Research on portable long range laser range-gated imaging system[J]., 2018, 39(9) : 166-170.
[5] 曹峰梅, 金伟其, 黄有为, 等. 水下光电成像技术与装备研究进展(上)——水下激光距离选通技术[J]. 红外技术, 2011, 33(2): 63-69.
CAO Fengmei, JIN Weiqi, HUANG Youwei, et al. Review of underwater opto-electrical imaging technology and equipment(Ⅰ)——underwater laser range-gated imaging technology[J]., 2011, 33(2): 63-69.
[6] 王红萍, 熊俊. 水下激光成像测量技术应用研究[J]. 舰船电子工程, 2019, 39(7): 10-12, 86.
WANG Hongping, XIONG Jun. Study on application of the underwater laser imaging technique[J]., 2019, 39(7): 10-12, 86.
[7] 全向前, 陈祥子, 全永前, 等. 深海光学照明与成像系统分析及进展[J]. 中国光学, 2018, 11(2): 153-165.
QUAN Qian, CHEN Xiangzi, QUAN Yongqian, et al. Analysis and research progress of deep-sea optical illumination and imaging system [J]., 2018, 11(2): 153-165.
[8] 张清博, 张晓晖, 韩宏伟. 基于改进生成对抗网络的水下激光图像后向散射光修复方法[J]. 激光与光电子学进展, 2019, 56(4): 114-122.
ZHANG Qingbo, ZHANG Xiaohui, HAN Hongwei.Backscattered light repairing method for underwater laser image based on improved generative adversarial network[J]., 2019, 56(4): 114-122.
[9] 赵阳, 盖志刚, 赵杰, 等. 距离选通水下激光成像技术研究[J]. 物流工程与管理, 2014, 36(7): 269-270.
ZHAO Yang, GAI Zhigang, ZHAO Jie, et al. Research on range-gated underwater laser imaging technology[J]., 2014, 36(7): 269-270.
[10] 孙健, 周亚民. 距离选通激光水下成像系统研究[J]. 舰船电子工程, 2009, 29(2): 24-26, 46.
SUN Jian, ZHOU Yamin. Research on the underwater laser range-gated imaging system[J]., 2009, 29(2): 24-26, 46.
[11] 赵美晶. 水下偏振鬼成像方法研究[D]. 大连: 大连海事大学, 2019.
ZHAO Meijing. Research on Underwater Polarization Ghost Imaging Method [D]. Dalian : Dalian Maritime University, 2019.
[12] Duntley S Q. Light in the sea[J].., 1963, 53(2): 214-233.
[13] 梁磊. 复杂水下环境的目标偏振成像探测技术[D]. 桂林: 桂林电子科技大学, 2020.
LIANG Lei. Target Polarization Imaging Detection Technology for Complex Underwater Environment[D]. Guilin: Guilin University of Electronic Science and Technology, 2020.
[14] 谭亚运. 水下脉冲激光近程周向扫描探测技术研究[D]. 南京: 南京理工大学, 2017.
TAN Yayun. Research on Short-range Circumferential Scanning Detection Technology of Underwater Pulsed Laser[D]. Nanjing: Nanjing University of Science and Technology, 2017.
[15] 胡玲, 王霞, 延波, 等. 水下距离选通成像系统调制传递函数模型分析[J]. 红外与激光工程, 2015, 44(11): 3262-3269.
HU Ling, WANG Xia, YAN Bo, et al. Analysis of underwater range-gated imaging system MTF[J]., 2015, 44(11) : 3262-3269.
[16] 付学志, 王庆胜, 邓代竹, 等. 距离选通水下激光成像作用距离简化核算方法[J]. 激光与红外, 2021, 51(3): 306-310.
FU Xezhi, WANG Qingsheng, DENG Daizhu, et al. A simplified accounting method for the range of distance separation laser imaging under water[J]., 2021, 51(3): 306-310.
[17] 王磊, 徐智勇, 张启衡, 等. 蓝绿激光水下成像系统的探测灵敏度分析[J]. 红外与激光工程, 2012, 41(1): 79-84.
WANG Lei, XU Zhiyong, ZHANG Qiheng, et al. Detection sensitivity analysis of underwater blue-green laser imaging system[J]., 2012, 41(1): 79-84.
[18] 许廷发, 苏畅, 罗璇, 等. 水下距离选通降质图像的增强[J]. 北京理工大学学报, 2017, 37(8): 853-857, 862.
XU Tingfa, SU Chang, LUO Xuan, et al. Enhancement of the underwater range-gated degraded image[J]., 2017, 37(8) : 853-857, 862.
[19] 王新伟, 孙亮, 雷平顺, 等. 水下超视距三角形距离能量相关三维成像(特邀)[J]. 红外与激光工程, 2018, 47(9): 903001-0903001(8).
WANG Xinwei, SUN Liang, LEI Pingshun, et al. Underwater over-the-horizon triangle distance energy-related three-dimensional imaging ( invited )[J]., 2018, 47(9): 903001-0903001(8).
[20] 王新伟, 孙亮, 王敏敏, 等. 水下二维及三维距离选通成像去噪技术研究[J]. 红外与激光工程, 2020, 49(2): 27-37.
WANG Xinwei, SUN Liang, WANG Minmin, et al. Deblurring methods for underwater 2D and 3D range-gated imaging [J]., 2020, 49(2): 27-37.
[21] 孙骁禾. 水下激光同轴同步扫描成像系统[D]. 青岛: 中国海洋大学, 2005.
SUN Xiaohe. Underwater Laser Coaxial Synchronous Scanning Imaging System[D]. Qingdao: Ocean University of China, 2005.
[22] Caimi F M, Dalgleish F R, Giddings T E, et al. Pulse versus CW laser line scan imaging detection methods: simulation results[C]//, 2007: 1-4.
[23] 戴佳佳. 基于结构光的三维成像技术研究[D]. 成都: 电子科技大学, 2022.
DAI Jiajia. Research on 3D imaging technology based on structured light[D]. Chengdu: University of Electronic Science and Technology of China, 2022.
[24] 周永昊. 基于线结构光的水下微形貌三维信息获取技术研究[D]. 郑州: 华北水利水电大学, 2021.
ZHOU Yonghao. Research on 3D Information Acquisition Technology of Underwater Micro-topography Based on Line Structured Light [D]. Zhengzhou: North China University of Water Resources and Hydropower, 2021.
[25] 苏显渝, 张启灿, 陈文静. 结构光三维成像技术[J]. 中国激光, 2014, 41(2): 9-18.
SU Xianyu, ZHANG Qican, CHEN Wenjing. Structured light three-dimensional imaging technology[J]., 2014, 41(2): 9-18.
[26] González E P, Díaz-Pache F S T, Mosquera L P, et al. Bidimensional measurement of an underwater sediment surface using a 3D-scanner[J]., 2007, 39(3): 481-489.
[27] Prats M, Fernandez J J, Sanz P J. An approach for semi-autonomous recovery of unknown objects in underwater environments[C] //13(OPTIM), 2012: 1452-1457.
[28] 赫连雪艳. 水下结构光三维测量系统建模与标定[D].郑州: 华北水利水电大学, 2020.
HE Lianxueyan. Modeling and Calibration of Underwater Structured Light Three-dimensional Measurement System[D]. Zhengzhou: North China University of Water Resources and Hydropower, 2020.
[29] 王玲玲. 基于双目立体视觉的水下三维重建[D]. 杭州: 浙江大学, 2011.
WANG Lingling. Underwater 3D Reconstruction Based on Binocular Stereo Vision[D]. Hangzhou: Zhejiang University, 2011.
[30] 乔金鹤. 基于双目立体视觉的水下三维重建技术研究[D]. 哈尔滨:哈尔滨工程大学, 2018.
QIAO Jinhe. Research on Underwater 3D Reconstruction Technology Based on Binocular Stereo Vision[D]. Harbin: Harbin Engineering University, 2018.
[31] 李文莉. 面向水下三维重建的光视觉特征提取与匹配方法研究[D]. 沈阳: 沈阳理工大学, 2017.
LI Wenli. Research on Optical Visual Feature Extraction and Matching Methods for Underwater Three-dimensional Reconstruction[D]. Shenyang : Shenyang University of Technology, 2017.
[32] 丁万山, 刘艳. 水中物体的光学三维形貌测量的研究[J]. 光学学报, 2007(1): 58-62.
DING Wanshan, LIU Yan. Optical measurement of object's surface three-dimensional shape in water[J]., 2007(1): 58-62.
[33] 王宗义. 线结构光视觉传感器与水下三维探测[D]. 哈尔滨: 哈尔滨工程大学, 2005.
WANG Zongyi. Line Structured Light Vision Sensor and Underwater Three-dimensional Detection[D]. Harbin: Harbin Engineering University, 2005.
[34] Narasimhan S G, Nayar K, Sun B, et al. Structured light in scattering media[C]//, 2005, 1: 420-427.
[35] Levoy M, CHEN B, Vaish V, et al. Synthetic aperture confocal imaging[J]., 2004, 23: 825-834.
[36] 邵晓鹏, 刘飞, 李伟, 等. 计算成像技术及应用最新进展[J]. 激光与光电子学进展, 2020, 57(2): 11-55.
SHAO Xiaopeng, LIU Fei, LI Wei, et al. Latest progress in computational imaging technology and application[J]., 2020, 57(2): 11-55.
[37] VELLEKOOP I M, AEGERTER C M. Focusing light through living tissue[C]//, 2010, 7554: 755430.
[38] VELLEKOOP I M. Feedback-based wavefront shaping[J]., 2015, 23(9): 12189-12206.
[39] VELLEKOOP I M, LAGENDIJK A, MOSK A P. Exploiting disorder for perfect focusing[J]., 2010, 4(5): 320-322.
[40] KATZ O, SMALL E, SILLBERBERG Y. Looking around corners and through thin turbid layers in real time with scattered incoherent light[J]., 2012, 6(8): 549-553.
[41] POPOFF S M, LEROSEY G, CARMINATI R, et al. Measuring the transmission matrix in optics: an approach to the study and control of light propagation in disordered media[J]., 2010,104(10): 100601.
[42] LIUTKUS A, MARTINA D, POPOFF S, et al. Imaging with nature: compressive imaging using a multiply scattering medium[J]., 2015(4): 5552.
[43] ANDREOLI D, VOLPE U, POPOFF S, et al. Deterministic control of broadband light through a multiply scattering medium via the multispectral transmission matrix[J]., 2015(5): 10347.
[44] DONG J, KRZAKALA F, GIGAN S. Spectral method for multiplexed phase retrieval and application in optical imaging in complex media[C]//,(ICASSP), 2019: 4936-4967.
[45] YAQOOB Z, PSALTIS D, FELD M S, et al. Optical phase conjugation for turbidity supression in biological samples[J]., 2008(2): 110-115.
[46] 王朋. 基于压缩感知的水下偏振光成像技术研究[D]. 西安: 中国科学院研究生院(西安光学精密机械研究所), 2015.
WANG Peng. Research on Underwater Polarized Light Imaging Technology Based on Compressed Sensing[D]. Xi 'an: Graduate School of Chinese Academy of Sciences (Xi 'an Institute of Optics and Fine Mechanics), 2015.
[47] 张倩. 基于主动式线偏振光照射的偏振成像实验研究[D]. 成都: 电子科技大学, 2020.
ZHANG Qian. Experimental Study of Polarization Imaging Based on Active Linearly Polarized Light Irradiation[D]. Chengdu : University of Electronic Science and Technology of China, 2020.
[48] 刘重阳. 基于计算机视觉的透明材料缺陷检测系统研究[D]. 哈尔滨: 哈尔滨理工大学, 2020.
LIU Zhongyang. Research on Defect Detection System of Transparent Materials Based on Computer Vision [D]. Harbin: Harbin University of Science and Technology, 2020.
[49] 刘飞, 吴晓琴, 段景博, 等. 浅谈计算成像在光电探测中的应用(特邀)[J]. 光子学报, 2021, 50(10): 1011001.
LIU Fei, WU Xiaoqin, DUAN Jingbo, et al.An introduction of application of computational imaging in photoelectric detection(Invited) [J]., 2021, 50(10): 1011001.
[50] ROWE M P, PUGH E N, TYO J S, et al. Polarization-difference imaging: a biologically inspired technique for observation through scattering media[J]., 1995, 20(6): 608-610.
[51] SCHECHNER Y Y, KARPEL N. Recovery of underwater visibility and structure by polarization analysis[J]., 2005, 30(3): 570-587.
[52] HUANG B, LIU T, HU H, et al. Underwater image recovery considering polarization effects of objects[J]., 2016, 24(9): 9826-9838.
[53] HU H,ZHAO L,HUANG B,et al. Enhancing visibility of polarimetric underwater image by transmittance correction[J]., 2017, 9(3): 1-10.
[54] LIU F,WEI Y,HAN P,et al. Polarization-based exploration for clear underwater vision in natural illumination[J]., 2019, 27(3): 3629-3641.
[55] 韩平丽. 水下目标偏振成像探测技术研究[D]. 西安: 西安电子科技大学, 2018.
HAN Pingli. Underwater Targets Detection Based on Polarization Imaging[D]. Xi'an: Xidian University, 2018: 67-78.
[56] 韩平丽, 刘飞, 张广, 等. 多尺度水下偏振成像方法[J]. 物理学报, 2018, 67(5): 054202.
HAN Pingli, LIU Fei, ZHANG Guang, et al. Multi-scale analysis method of underwater polarization imaging[J]., 2018, 67(5): 054202.
[57] Shapiro J H. Computational ghost imaging[J]., 2008, 78(6): 061802.
[58] Klyshko D N. Two-photon light: influence of filtration and a new possible EPR experiment[J]., 1988, 128(3-4): 133-137.
[59] Pittman T B, Shih Y H, Strekalov D V, et al. Optical imaging by means of two-photon quantum entanglement[J]., 1995, 52(5): R3429.
[60] Abouraddy A F, Saleh B E A, Sergienko A V, et al. Role of entanglement in two-photon imaging[J]., 2001, 87(12): 123602.
[61] Bennink R S, Bentley S J, Boyd R W. “Two-photon” coincidence imaging with a classical source[J]., 2002, 89(11): 113601.
[62] LE M, WANG G, ZHENG H, et al. Underwater computational ghost imaging[J]., 2017, 25(19): 22859-22868.
[63] LUO C L, LI Z L, XU J H, et al. Computational ghost imaging and ghost diffraction in turbulent ocean[J]., 2018, 15(12): 125205.
[64] ZHANG Y, LI W, WU H, et al. High-visibility underwater ghost imaging in low illumination[J]., 2019, 441: 45-48.
[65] 特伦斯.谢诺夫斯基. 深度学习[M]. 姜悦兵译. 北京: 中信出版社, 2019.
Terrence Shenowski. Deep Learning[M]. Beijin : CITIC Press, 2019.
[66] 瀧雅人. 深度学习入门[M]. 杨秋香译. 北京: 机械工业出版社, 2020
LONG Yaren.[M]. Beijing: Mechanical Industry Press, 2020.
[67] ANDO T, HORISAKI R, TANIDA J. Speckle-learning-based object recognition through scattering media[J]., 2015, 23(26): 33902-33910.
[68] LI Y, XUE Y, TIAN L. Deep speckle correlation: a deep learning approach toward scalable imaging through scattering media[J]., 2018, 5(10): 1181-1190.
[69] LYU M, WANG H, LI G, et al. Learning-based lensless imaging through optically thick scattering media[J]., 2019, 1(3): 036002.
[70] LAI X,LI Q,WU X,et al. Mutual transfer learning of reconstructing images through a multimode fiber or a scattering medium[J]., 2021(9): 68387-68395.
[71] 苏俊宏, 尚小燕, 弥谦. 光电技术基础[M]. 北京: 国防工业出版社, 2011.
SU Junhong, SHANG Xiaoyan, MI Qian.[M]. Beijing: National Defense Industry Press, 2011.
[72] Bigas M, Cabruja E, Forest J, et al. Review of CMOS image sensors[J]., 2006, 37(5): 433-451.
[73] 胡仓陆, 焦岗成, 郭晖, 等. 宽光谱高蓝绿响应GaAsP阴极微光像增强器[C]//国防光电子论坛第二届新型探测技术及其应用研讨会论文集, 2015: 15.
HU Canglu, JIAO Gangcheng, GUO Hui, et al. Wide-spectrum and high blue-green response GaAsP cathode low-light-level image intensifier [C]/, 2015: 15.
[74] 程宏昌, 端木庆铎, 石峰, 等. 双微通道板紫外像增强器工作特性研究[J]. 真空科学与技术学报, 2013, 33(6): 524-527.
CHENG Hongchang, DUAN Muqingduo, SHI Feng, et al. Study on the working characteristics of dual microchannel plate UV image intensifier [J]., 2013, 33(6): 524-527.
Advances in Underwater Photoelectric Imaging Technology
SHI Feng1,2,CHENG Hongchang1,2,YAN Lei1,2,GUO Xin1,2,LI Shilong1,2,QIU Hongjin1,2,DING Xiwen1,2
(1.,650223,; 2.,710065,)
With the increasing exploration, development, and utilization of China's oceans, rivers, and groundwater resources, as well as the increasingly urgent military need for sovereign defense in territorial waters, obtaining high-quality target images under long-distance underwater conditions has become an urgent problem to be solved in many fields, such as underwater environmental surveys, target detection, and enemy-self confrontation. Currently, the underwater imaging detection technology includes two main methods: acoustic and photoelectric detection. In this study, the current status of the main underwater high-resolution photoelectric detection imaging technology is studied, the advantages and disadvantages of different technical approaches are analyzed, and the photodetectors used in various underwater detection/imaging systems are compared. Combined with its own technical background, it is proposed that the development of a GaAsP photocathode dual microchannel plate image intensifier with high sensitivity, low noise, high gain, fast response, wide dynamic range, and good linearity should be accelerated to simplify the low sensitivity, high noise, low gain, and long processing time, owing to the poor performance of the detector in the photoelectric system, and accelerate the conversion speed of various new technologies into products and practical equipment. The results of this study support the development of underwater photoelectric imaging technology.
underwater detection, photoelectric imaging, detector
O439
A
1001-8891(2023)10-1066-18
2022-07-20;
2022-11-14.
石峰(1968-),男,博士,研究员,主要从事微光夜视技术研究。E-mail:shfyf@126.com。
程宏昌(1974-),男,博士,正高工,主要从事微光夜视技术研究。E-mail:chh600@163.com。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
电子制作(2019年12期)2019-07-16 08:45:20
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
小学科学(2019年12期)2019-01-06 03:38:45
测控技术(2018年6期)2018-11-25 09:50:24
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
发明与创新(2015年30期)2015-02-27 10:39:52
