
磁屏蔽舱内极弱磁测量装置结构设计与应用
2023-11-01 02:23:06计亚兵王浩安刘习凯文通
机械设计与研究 2023年5期
计亚兵, 王浩安, 刘习凯, 文通
(北京航空航天大学 宁波创新研究院,浙江 宁波 315800,E-mail: 1032047379@qq.com)
高精度极弱磁场测量传感器在高端医疗设备检测、航空航天、资源能源勘探、国防和地质灾害监测等方面有着广泛而重要的应用[1-3]。尤其随着国家大力发展零磁科学,建设极弱磁场重大科技基础设施,未来零磁医学、零磁生物学、零磁化学、零磁基础物理和材料学将聚焦利用极弱磁测量技术[4-5],掌握极弱磁场测试装置及其测试方法至关重要。
目前经过磁屏蔽装置屏蔽后,剩余磁场可达到10-12T量级(地球磁场为10-6T量级)[6-7]。目前常见的位移测试装置多采用金属位移测试装置,本身就带有磁性,不具备对磁屏蔽舱空间内剩磁大小进行测试的先决条件,且量程有限,不具备对磁屏蔽舱内剩余磁场大小测量以及均匀区的搜索。通过选用无磁材料位移测试装置代替金属材料位移装置,并且科学设计无磁材料位移装置机械结构能有效解决结构本身有磁带来的测试影响和由于结构变形产生的测试精度差技术难题[8]。
根据磁屏蔽舱空间剩磁大小处于nT项目指标实际情况,本文设计了由无磁材料构成且应用于经过主动磁屏蔽和被动磁屏蔽后的极弱磁场空间三轴位移测量装置,通过ANSYS Workbench进行数值分析,最后通过对磁屏蔽舱进行初始剩磁测量、消磁后剩磁测量、主动磁补偿线圈剩磁测试、磁噪声测试,证明了所设计的极弱磁测量装置的可行性[9-11]。
1 极弱磁测量位移装置结构的特点
1.1 概述
如图1所示,极弱磁测量位移装置主要由第一轴无磁位移装置、第二轴无磁位移装置、第三轴无磁位移装置、磁传感器夹持装置、连接板和加强筋组成。如图2所示,第一轴、第二轴、第三轴无磁位移装置可以实现磁传感器在封闭磁屏蔽舱X、Y、Z三个方向任意移动测量剩余磁场大小,从而确定磁屏蔽舱内目标搜索均匀区。
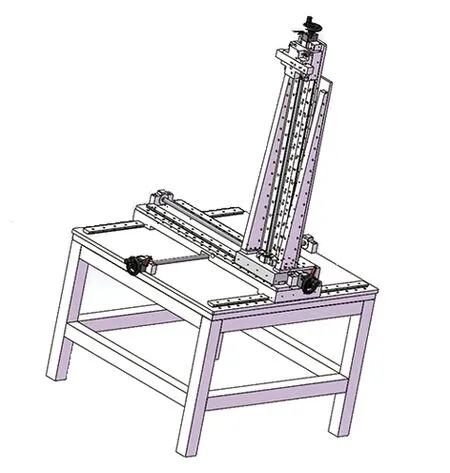
图1 极弱磁位移测量装置

图2 极弱磁位移测量装置工作效果图
本装置不仅能够为待测的高精度极弱磁场测量传感器提供一种剩磁测量装置,同时通过选用无磁材料和优化机械结构有效解决了结构本身有磁带来的测量影响和由于结构变形产生的精度差技术难题,并且提供了一种在剩磁测试装置下的剩磁测试方法,极弱磁测量装置主要设计参数如表1所示[12-13]。

表1 极弱磁测量装置主要设计参数表/mm
1.2 第一轴无磁位移装置
如图3所示,设置在所述工作台上的整体采用无磁材料制成的第一轴位移装置,第一轴位移装置包括第一轴安装座、两根平行间隔设置的第一轴导轨、第一轴固定座、第一传动丝杆和第一手轮,其中第一轴固定座采用工程塑料螺钉固定在工作台上,第一轴导轨通过工程塑料螺钉固定在第一轴固定座上,第一轴安装座活动连接在第一轴导轨上,并能沿第一轴导轨的长度方向来回往复移动。

图3 极弱磁位移测量装置结构示意图
1.3 第二轴无磁位移装置
如图3所示,设置在第一轴安装座上的整体采用无磁材料制成的第二轴位移装置,第二轴位移装置包括第二轴安装座、两根平行间隔设置的第二轴导轨、第二轴固定座、第二传动丝杆和第二手轮,其中第二轴固定座采用工程塑料螺钉固定在第一轴安装座上,第二轴安装座活动连接在第二轴导轨上,并能沿第二轴导轨的长度方向来回往复移动。
1.4 第三轴无磁位移装置
设置在第二轴安装座上的整体采用无磁材料制成的第三轴位移装置见图3。第三轴位移装置包括第三轴安装座、第三轴导轨、第三轴固定座、第三传动丝杆和第三手轮,其中第三轴固定座采用工程塑料螺钉固定在第二轴安装座上,第三轴安装座活动连接在第三轴导轨上,并能沿第三轴导轨的长度方向来回往复精确移动,第三轴固定座通过与第二轴安装座之间设有用于加强连接稳固性的加强连接支撑板。
1.5 极弱磁测试装置传感器夹持装置及剩磁测试方法
磁测量传感器通过无磁材料制成的传感器夹持装置固定在第三轴安装座上。以工作台所在平面为基准平面建立标准坐标系,所述第一方向为标准坐标系的X方向,所述第二方向为标准坐标系的Y方向,所述第三方向为标准坐标系的Z方向。本装置通过在磁屏蔽舱三个方向上产生位移,不断搜索符合测试要求的目标均匀区,其特征在于包括如下步骤:
步骤1:将磁测量传感器安装在传感器夹持装置上,将整个装置设置在磁屏蔽舱内;
步骤2:以磁屏蔽舱的几何中心点为中心,以n×n×n为单元格间距,通过移动第一轴位移装置、第二轴位移装置和第三轴位移装置,分别获取N×N×N正方体区域内共计n×n×n个测量点的剩余磁场强度,分别记为Pix+,其中n和N均为正整数,单位为cm,N为n的倍数,i=1,2,…,n×n×n;
步骤3:将磁测量传感器在与X轴和Y轴所在平面平行的平面内进行180°翻转,然后再通过移动第一轴位移装置、第二轴位移装置和第三轴位移装置,分别获取上述n×n×n个测量点的剩余磁场强度,分别记为Pix-;
步骤4、将磁测量传感器在与X轴和Y轴所在平面平行的平面内再进行90°翻转,然后再通过移动第一轴位移装置、第二轴位移装置和第三轴位移装置,分别获取上述n×n×n个测量点的剩余磁场强度,分别记为Piy+;
步骤5、将磁测量传感器在与X轴和Y轴所在平面平行的平面内再进行180°翻转,然后再通过移动第一轴位移装置、第二轴位移装置和第三轴位移装置,分别获取上述n×n×n个测量点的剩余磁场强度,分别记为Piy-;
步骤6、将磁测量传感器在与X轴和Z轴所在平面平行的平面内再进行90°翻转,然后再通过移动第一轴位移装置、第二轴位移装置和第三轴位移装置,分别获取上述n×n×n个测量点的剩余磁场强度,分别记为Piz+;
步骤7、将磁测量传感器在与X轴和Z轴所在平面平行的平面内再进行180°翻转,然后再通过移动第一轴位移装置、第二轴位移装置和第三轴位移装置,分别获取上述n×n×n个测量点的剩余磁场强度,分别记为Piz-;
步骤8、通过如下公式计算N×N×N正方体区域内共计n×n×n个测量点的实际剩余磁场Mi:
步骤9:根据步骤7的计算结果,如果n×n×n个测量点的实际剩余磁场Mi均在预设范围内,则将N×N×N正方体区域输出为目标均匀区,如果n×n×n个测量点的实际剩余磁场Mi中有某一个点的实际剩余磁场不在预设范围内,则降低n值,重复步骤2-8,直至所有n×n×n个测量点的实际剩余磁场Mi均在预设范围内,然后将得到的N×N×N正方体区域输出为目标均匀区。
2 有限元计算分析
极弱磁测试装置整体主要采用POM热塑性工程材料,是一种高密度、高结晶且具有良好的物理、机械和化学性能,尤其是具有优异的耐摩擦性能[14]。如图4所示,为极弱磁测试装置位移极限位置,依此作为有限元分析对象。

图4 极弱磁测量装置有限元模型
2.1 材料属性
极弱磁测量装置材料的物理属性如表2所示。

表2 材料的物理属性
2.2 计算载荷
极弱磁测试装置按垂直自重整备质量载荷工况考虑进行计算。
2.3 计算结果分析
如图5,图6所示,在极限位置情况下,极弱磁测试装置的最大变形量为0.12 mm,最大应力为0.25 MPa,完全满足设计要求。

图5 垂直重力变形量
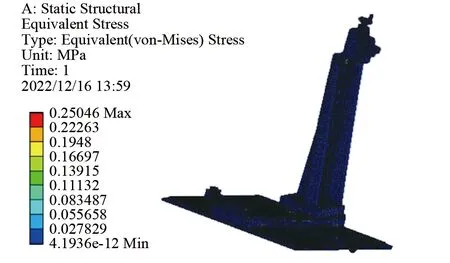
图6 垂直自重应力
3 极弱磁测量装置试验
3.1 地磁环境测试
测试伊始,首先对磁屏蔽舱安装环境的地磁场信息进行测量,测试现场图片如图7所示,天地、东西、南北向的地磁数据分别为:19 682 nT,4 617 nT,33 642 nT。

图7 地磁环境测试
3.2 初始剩磁测量
将极弱磁测量装置放置于磁屏蔽舱内,利用性能更加稳定和准确的单轴磁通门传感器,测试中按照理论均匀区大小在天地方向设置间隔为15 cm的5个测试平面。每个平面上按图8所示的测试点位对目标区域内的剩磁进行测量。
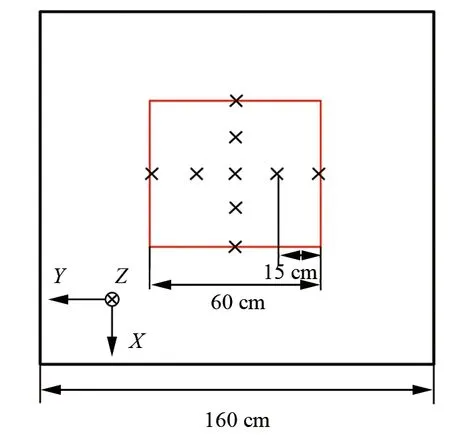
图8 剩磁测量点位分布示意图
受磁通门传感器工作原理以及所处环境的影响,传感器存在一定的偏置,每次测试时,首先对单轴磁通门传感器偏置进行测量。测试时需要在同一个测试点将其翻转180°,分别测得B+和B-,根据式(1)计算得到偏置磁场的大小
通过偏置测量,可计算得到单轴磁通门传感器的偏执为12.5 nT。随后按照图8所示的测试点位,对磁屏蔽舱的初始剩磁进行测试与数据总结,测试现场图片如图9所示。

图9 磁屏蔽舱初始状态测量
初始状态下,在边长0.6 m的立方体均匀区内,剩磁最大为37 nT,高于项目设定25 nT指标。以过中心点的三个轴线上剩磁数据为例,其变化趋势如图10所示,三个方向,磁场并未呈现近似线性的梯度变化。天地方向(X)在15 cm后受影响较大。东西方向(Z)随着远离门体梯度逐渐减小。南北方向(Y)则随着靠近门体边缘梯度受影响最大,成无规律变化。

图10 过中心点三轴向磁场变化
3.3 消磁后剩磁测试
利用频率为10 Hz,幅值振荡衰减正弦信号输入至7 796功率放大器,连接分布式消磁线圈后产生消磁电流。消磁线圈的阻抗在10 Hz频率处经LCR表测试为0.6,消磁时峰值电流大于100 A,保证产生的磁场大于坡莫合金的饱和磁场。受输入正弦信号偏置等的影响,实际消磁测试时针对线圈正接和反接分别进行消磁,以抵消偏置电流的影响。消磁时采用内层坡莫合金-外层坡莫合金-内层坡莫合金的顺序对磁屏蔽舱进行消磁。消磁后,均匀区内剩磁最大值为6.2 nT,优于项目设定的25 nT指标。以过中心点的三个轴线上剩磁数据为例,其变化趋势如图11所示,天地方向(X)和南北方向(Y)则随着靠坐标位置变化在1 nT的测量精度内,可认为存在线性梯度变化。东西方向(Z)随着远离门体梯度逐渐减小。

图11 消磁后过中心点三轴向磁场变化
3.4 主动磁补偿线圈剩磁测试
在此基础上,利用三台直流补偿电源(艾德克斯-IT6132B)结合紧贴在磁屏蔽舱外部的磁补偿线圈开展磁补偿性能测试,补偿线圈如图9中多匝红色密绕线圈所示。天地方向线圈为30匝;东西方向为25匝;南北方向为27匝。调节时,以中心点三个方向的剩磁为依据,逐步增大补偿电流,直至三方向磁场均小于1 nT,主要受限于磁通门传感器偏置的测量精度。测试中首先对线圈常数进行测量,逐步增大直流电流值,同时测量该方向中心点以及+30 cm处的磁场变化,结果如图12所示。

图12 磁补偿线圈常数测试
最终天地方向施加的补偿电流为180 mA,东西方向施加的补偿电流为80mA,南北方向施加的电流为120 mA。增加直流补偿电流后均匀区内剩磁最大值为13.6 nT,集中于门体左侧区域,受门体闭合完整性影响,此处磁场产生异常,其他区域补偿效果明显。以过中心点的三个轴线上剩磁数据为例,其变化趋势如图13所示,磁补偿后,过中心点的三方向磁场变化近似关于中心点对称。

图13 磁补偿后过中心点三轴向磁场变化
3.5 磁噪声测试
针对磁补偿前后磁屏蔽舱的磁噪声进行测量,采用Quspin磁强计置于中心位置处记录数据并作功率谱密度分析,磁补偿前后磁噪声变化不大,磁噪声如图14所示。补偿前后,磁屏蔽舱的噪声在20 Hz~100 Hz频带内达到15 fT/Hz1/2,达到Quspin传感器的本底噪声水平,同时施加磁补偿后,未明显提高磁屏蔽舱的低频段磁噪声。需要注意的是,磁噪声测试中存在23 Hz以及27 Hz的异常峰,可能与环境振动、磁屏蔽舱共振等相关[15]。

图14 磁补偿前磁噪声
4 结论
该研究主要针对为测量磁屏蔽舱内剩余磁场大小设计了极弱磁测量装置,并且给出了具体的测量方法,最后进行了磁屏蔽舱内极弱磁测试。现得到如下结论:
(1) 基于磁屏蔽舱空间内极弱磁场工作环境的特点,通过整体选用无磁材料,设计了一种无磁三轴极弱磁测量位移装置,通过优化机械结构并同时对极弱磁三轴位移装置极限位置进行变形量、应力分析,有效解决了结构本身有磁带来的测量影响和由于结构变形产生的精度差技术难题,能使高精度磁场测量传感器在极弱磁场工作环境下依然准确测量剩余磁场。并详细介绍了其结构、功能作用,给出了位移测试方法,保证了测量的准确度。
(2) 通过三轴极弱磁位移装置对磁屏蔽舱内空间剩磁大小进行测试,分别对初始剩磁测量、消磁后剩磁测量、主动磁补偿线圈剩磁测试、磁噪声测试,证明了所设计的极弱磁测量装置的可行性。
猜你喜欢
电源技术(2022年12期)2023-01-07 13:13:08
航空学报(2022年5期)2022-07-04 02:24:32
防爆电机(2021年5期)2021-11-04 08:16:32
模具制造(2019年10期)2020-01-06 09:13:08
军事文摘(2019年13期)2019-07-12 08:12:42
自动化与仪表(2019年2期)2019-03-06 08:24:26
数字通信世界(2019年1期)2019-02-14 02:00:38
中国人民警察大学学报(2016年6期)2016-10-20 08:48:42
船电技术(2016年1期)2016-03-25 10:14:29
工业炉(2016年1期)2016-02-27 12:34:09
