基于舵面控制的外挂物分离仿真方法研究
2023-11-01 10:17靳晨晖李典王泽汉陈鑫
航空科学技术 2023年8期
靳晨晖 李典 王泽汉 陈鑫
摘 要:基于舵面控制的外挂物分离仿真是一个典型的多学科耦合问题,需要对其气动性能、飞行性能和控制性能综合进行分析。本文主要围绕数值仿真中计算流体力学(CFD)和控制方程与刚体动力学(RBD)方程的耦合求解、高效嵌套网格技术、耦合飞行控制系统(FCS)的气动/运动/控制的多学科耦合仿真的三个关键技术进行研究。针对以上技术难点,发展了一套基于舵面控制的外挂物分离仿真方法。仿真结果表明,通过舵面控制,有效改善了外挂物在分离过程中的姿态变化剧烈的现象,提升了分离安全性与分离品质;发展的基于舵面控制的外挂物分离仿真方法能够处理复杂运动边界的非定常问题,检验飞行控制律,具有一定的工程价值。
关键词:飞行仿真; 多学科耦合; 嵌套网格; 舵面控制; 分离品质
中图分类号:V215.3 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.08.003
在现代武器投放的设计中,为了在分离过程中避免弹身尾部碰到挂架,给载机带来极大的安全隐患,一般会使弹体在脱离挂架前具有较大的抬头角速度,但是如果在分离中后期不对导弹的飞行姿态做任何控制,即使导弹最后能够成功分离,但是迎角过大也会使其失去战斗毁伤效能。因此,在分离后需要对外挂物施加一定的舵面偏转来对外挂物的姿态进行控制,在确保安全分离的同时又不会影响其战斗毁伤效能。
传统的研究方法是基于定常气动力数据库建立数学模型,以此来进行控制律的设计和飞行轨迹仿真。由于无法充分考虑多学科耦合作用和流动的非定常效应,该类研究方法往往带有一定的局限性。计算流体力学(CFD)理论与计算机科学的发展给航空航天产业发展带来了强有力的支撑,研究者们开始探索一种全新的研究手段,即基于CFD非定常数值模拟方法的数值虚拟飞行(NVF)仿真技术。国内外对此开展了大量的研究工作:美国陆军研究实验室(ARL)早期开展了计算流体力学与六自由度刚体动力学耦合方法的研究,搭建了数值仿真平台,其中有代表性的是:J. Sahu与M. Costello等[1-3]对带有气动舵面的旋转弹飞行过程进行数值模拟。德国航空航天研究院(DLR)的A. schütte项目组[4]利用结构网格求解器FLOWer与非结构网格求解器(TAU)、耦合飞行动力学软件对X-31自由滚转进行数值模拟。J. Dean等[5]使用CREATE-AV/Kestrel Solver求解器对不考虑舵面偏转的F-22快速拉升机动和失速响应过程进行了数值模拟。国内,张涵信等[6]对简化的飞船返回舱再入过程进行数值模拟,并分析了飞船的动态稳定性演化规律。杨云军等[7]对细长体构型的三角翼的滚转与侧滑两自由度耦合运动进行了数值模拟。索谦等[8]基于变时间步长的CFD与刚体动力学(RBD)耦合方法对ARL旋转弹进行数值模拟,计算结果与试验高度一致。曾铮等[9]基于带有拉普拉斯光顺技术的网格变形方法对AEDC外挂物投放模型进行数值模拟。李孝伟等[10]基于嵌套网格技术对飞行器外挂物投放过程进行数值模拟,仿真结果与试验数据拟合较好;马英杰[11]采用CFD与六自由度方程的耦合仿真技术,对记录器抛放情况进行仿真。张勇勇等[12]基于嵌套网格技术,模拟了旋翼各片桨叶之间,以及旋翼/机身/尾桨之间复杂的相对运动关系,并进行气动噪声分析。
随着对CFD/RBD耦合的研究逐渐增多,当下研究者们已经不再满足仅对无控状态下的飞行器进行非定常数值模拟,开始结合各种控制手段对飞行器的动态过程进行数值模拟。英国格拉斯哥大学(Glasgow)的M. R. Allan[13]通过求解欧拉方程,对预先设定控制律的某标准模型在纵向平面内的俯仰与沉浮进行数值模拟;DLR分别利用结构网格求解器FLOWer与非结构网格求解器TAU、耦合飞行动力学软件对X-31副翼控制的滚转机动进行数值模拟[14]。国内达兴亚等[15]基于三阶Adams预估-校正法和嵌套网格技术对窄条翼导弹的纵向虚拟飞行进行了数值模拟;李锋等[16]基于非结构嵌套网格,采用舵面偏转进行控制,对高超声速飞行器变迎角机动过程进行数值模拟;席柯、陈琦等[17-18]采用比例/积分/微分(PID)的舵面控制律对带翼导弹在纵向平面内的飞行过程进行数值模拟;常兴华等[19]对某型战术导弹在纵向平面内单自由度舵面控制进行了研究。
尽管基于非定常流场计算和飞行动力学方程耦合已有较多文献可以参考,但是对耦合控制律的非定常数值模拟还较为少见。其主要难点在于:流动控制方程与刚体动力学方程是一个高度复杂的非线性系统,需要在引入控制模块的情况下进行统一求解,这对多学科耦合方法与数值虚拟飞行仿真平台的集成程度提出了更高的要求;同时释放多个自由度的耦合仿真相对于常规纵向平面内单自由度仿真实现过程相对较为复杂。
本文基于自主开发的非结构混合网格求解软件,耦合六自由度刚体动力学方程,使用并行非结构嵌套网格技术,将一种舵面偏转控制函数成功应用于外挂物分离仿真。
1 数值方法
1.1 非定常N-S方程求解

1.3 嵌套网格技术
当使用气动舵面来调整飞行器飞行姿态时,每个非定常时间步内需要对计算网格进行更新,一般使用动网格技术。现有的动网格技术主要有网格变形、网格重构和嵌套网格。其中网格变形在处理大尺度位移问题时,网格质量会变得很差。网格重构技术在每个时间步都需要重新生成网格并插值,计算周期相对较长,对计算资源要求较高[20-21]。因此本文选择嵌套网格技术来数值模拟带有舵面控制的外挂物分离过程。
嵌套网格技术在一定程度上解决了计算网格生成上的困难,但它的处理过程却非常复杂,带来的问题是数据规模相对较大。为了提高计算效率,发展了一种高效的、鲁棒的、自动化的非结构嵌套网格方法。对于动态嵌套问题,求解器在每个物理时间步进行挖洞、洞面优化和寻点,在每个子迭代步通过插值信息更新插值边界点的流场,最终得到收敛的流场解,详细过程可参見文献[22]。
1.4 气动/运动/控制耦合仿真策略
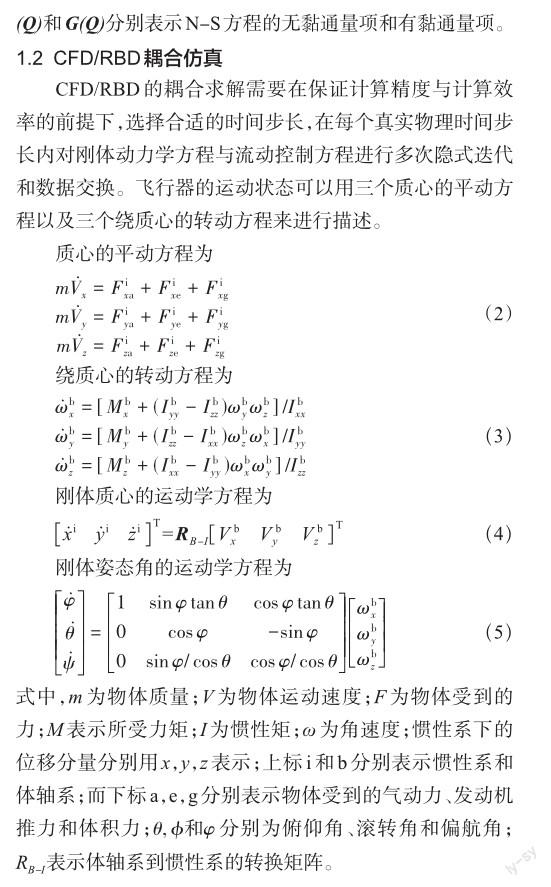
飞行器的控制律设计是一个典型的多学科耦合过程,本文使用的气动/运动/控制数值飞行仿真平台通过对计算流体力学控制方程和六自由度刚体动力学方程进行直接求解,获得实时的飞行姿态变化与非定常气动力,对于舵面偏转角的控制耦合求解流程如图1所示,具体实现步骤为:(1)首先进行定常流场的求解,从而得到初始收敛的定常初始流场;(2)从定常初始流场开始进行非定常计算,求解非定常控制方程,采用双时间方法进行推进;(3)真实物理时间每推进一步,更新气动力及气动力矩,代入六自由度刚体动力学方程中去计算;(4)根据刚体动力学方程中计算得到的位移和姿态角来调整计算网格,同时根据舵面偏转规律,操纵舵面相对于机体转动;(5)更新计算网格以进行下一步的非定常计算。
2 外挂物分离仿真研究
2.1 数值仿真平台精度验证
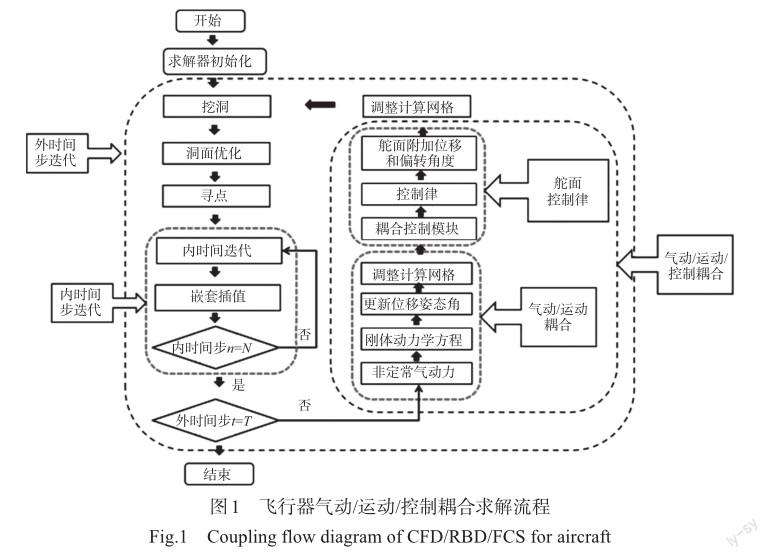
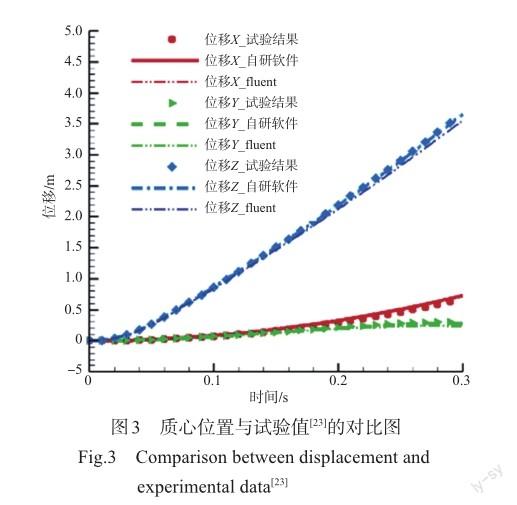
使用AEDC弹体标模作为验证算例,来验证本文搭建的数值虚拟飞行仿真平台的有效性。计算模型带有4个对称尾翼,其中心圆柱体直径为0.5m,实际长度为3.017m。每个尾翼都带有45°的倾斜角,展向翼型为NACA008,其余计算参数可参见文献[23]。如图2、图3所示,可以看出计算结果与试验值和商业软件吻合度相对较高,从而验证本文所使用仿真平台的计算精度。
2.2 基于舵面控制外挂物分离仿真
飞机的气动舵面设计包括总体、气动、飞行动力学、飞行控制等多个学科的内容,由于本文所使用的为标准计算模型,计算结果相对较为丰富,流场求解器与嵌套网格算法的计算精度已经进行了验证。由于本文的研究内容集中于数值虚拟飞行仿真平台的搭建,因此对于舵面的布置、舵面操纵的效率、全机的飞行稳定性、舵面的气动补偿与平衡铰链力矩关注较少。
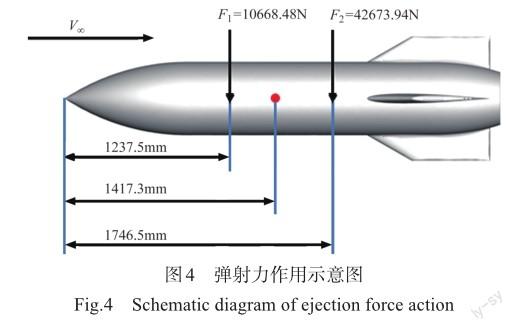
为了避免在分离过程中弹身尾部碰到挂架,一般会使弹体在脱离挂架前具有较大的抬头角速度,如图4所示,分离时通过作用于质心前后的弹射力来使外挂物获得一个抬头力矩,但是当导弹的静稳定裕度较小时,分离中后期迎角增加过大会使其最终失去战斗毁伤效能,本节将利用尾舵偏转的方法来对外挂物分离中后期的飞行姿态进行简单的控制。
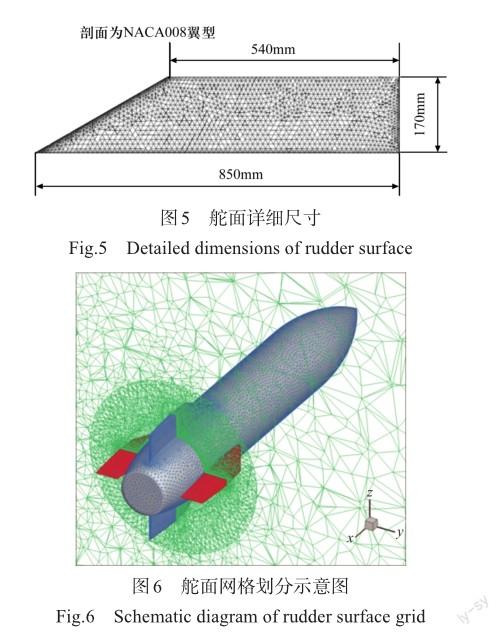
飞行器的气动舵面往往安装在偏离质心处的位置,力臂为舵面的转轴位置与质心处的相对长度。为使弹身低头产生负迎角,提升其毁伤性能,需要对尾舵进行正舵偏角偏转(规定舵面前缘抬头为正舵偏),产生向上的法向力,因此尾舵产生的升力与弹体总升力方向相反,本文所使用AEDC标模舵面的详细尺寸,可以参考图5所示。
如图6所示,使用非结构网格划分策略,围绕舵面与弹身分别生成计算网格,第一层绝对高度为1.3E-5,增长率为1.225,单个舵面网格量约为90万,弹身网格量为210万网格,计算马赫数为0.95,单位雷诺数为7.87E6,迎角为0°,温度为260.77K,湍流模型选择SA,非定常时间步长为2ms,内迭代设置为250步。同外挂物自由分离相比,带控制律的外挂物还需要通过舵面控制模块对外挂物尾舵的舵面偏转角进行控制,所以在进行完外挂物整体的网格旋转后,还需要对舵面网格进行进一步的旋转。
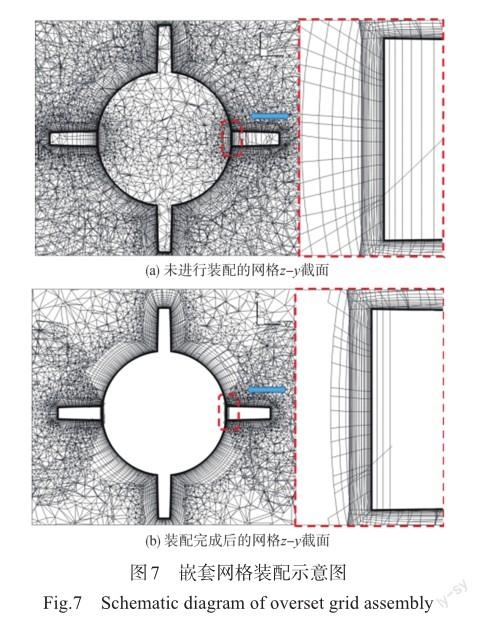
在对舵面与弹身的网格进行组装时,按照到壁面距离大小来进行挖洞处理,如图7所示,通过一系列的嵌套装配优化措施,两套网格均按照预期进行了组装。
2.3 仿真结果分析
飞行器在实际飞行过程中,其操纵规律十分复杂,根据实际情况可以将舵面操纵简化为阶跃、谐波和脉冲等,舵面操纵规律基本可以通过这几种操纵方式进行线性叠加的方式来获取,因此研究这几种典型的控制规律对于研究飞行器的动操纵性是具有普遍意义的。本文利用经验试凑法对不同的舵面偏转角进行分析,以此来选取最优的舵面偏转速率与最大偏转幅值。
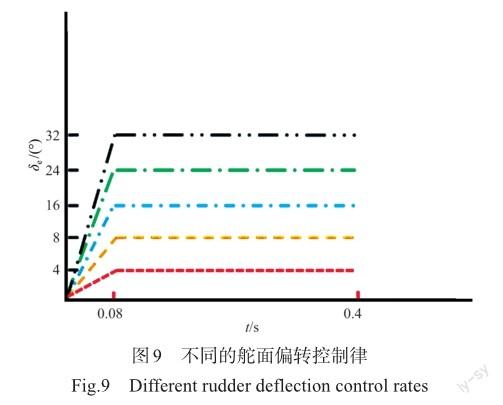
舵面偏转速率的大小会对飞机的动态响应产生很大影响,当舵面的偏转速率达到饱和时,在外界的扰动作用下,飞行器将很有可能进入不稳定等危险的状态,进而影响飞行器的飞行品质,因此对舵面偏转速率的研究变得至关重要。从结构与气动方面来考虑,舵面的偏角受到一定的限制。本文设计了不同的舵面偏转角速度,由于控制舵面偏转的单片机响应时间一般是毫秒量级的,设定舵面控制时间为0.08s。如图8、图9所示,为使弹体低头产生负迎角,需要对尾舵进行正舵偏角偏转(舵面前缘抬头为正舵偏),产生向上的法向力,最大偏转角分别为4°、8°、16°、24°、32°,通过舵面偏转时间与舵面偏转速度,对舵面偏转速率进行控制。

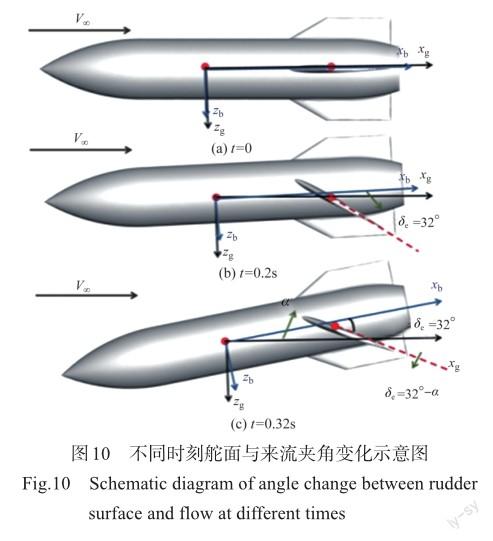
本文所使用的求解器的姿态角是统一在地轴系下进行的,而且舵面固定于机身之上,随着机身姿态角的变化,相对于来流的角度也会发生变化,因此在进行耦合仿真时,为了真实反映舵面的流动状况,同时将舵面偏转角与机身的姿态角统一到地轴系上进行耦合仿真。图10所示为不同时刻舵面与来流的夹角变化示意图,选取舵偏为32°的计算结果进行分析,其中Xg、Zg为地轴坐标系,Xb、Zb为体轴系下的坐标系,可以清楚地看到,当t∈(0,0.2)s这一时间段内时,弹身相对于来流的方向在短时间内变化较小,此时舵面相对来流的夹角相对变化较小,随着飞行时间的不断增加,当t=0.32s时,在舵面的控制作用下,弹身相对于来流的迎角发生较大变化,而舵面由于通过铰链固定于弹身上,与来流的夹角也会发生改变,下一时刻通过CFD求解获得的对弹身控制的气动力与气动力矩也会发生改变,从而对弹身的控制作用也会发生改变。区别于传统不考虑舵面的动态效应,本文的仿真平台中舵面所受的气动力每一时刻都在发生变化,这给控制增加了極大的难度。
图11、图12所示为不同舵面偏角下外挂物沿X方向和Z方向上的位移变化曲线,可以清楚地看出,当舵面发生偏转后,舵面的偏转会增加相对于来流的迎风面积,因此舵面偏转的角度越大,相对于来流的迎风面积越大,从而沿X方向的位移变化量越大。至于沿Z方向的相对位移变化曲线,总体呈不断增加的趋势,其中为使弹身低头产生负迎角,尾舵进行正舵偏角偏转,产生向上的法向力,向上的法向力会减小外挂物下降的位移,因此舵偏为4°时,外挂物下降的位移相对较大,当舵偏为32°时,外挂物下降的位移最小。
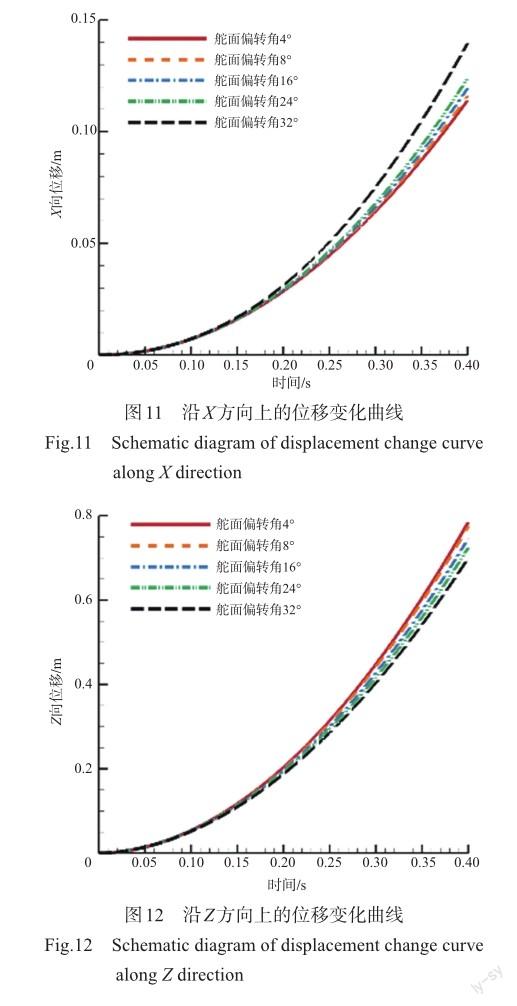
图13为俯仰角变化曲线,可以清楚地看出,不同的舵面偏转后,外挂物的俯仰角变化也有很大差异,当舵偏为4°和8°时,外挂物分离后俯仰角不断增加,外挂物整体呈不断抬头的趋势,极有可能碰到挂架,对载机的飞行安全也会产生很大影响,分离品质较差。当舵偏为16°时,外挂物俯仰角变化曲线变化较为平缓,俯仰角在分离初期有小幅的增加,分离中后期的幅值基本保持不变。当舵偏为24°时,外挂物的俯仰角呈现先小幅正向增加,随后反向大幅增加,整体分离品质较好,且外挂物低头有利于提升其战场毁伤性能。当舵偏为32°时,俯仰角的变化并没有如预期的那样:整体先小幅增加,后反向大幅增加,反向增加的幅值整体大于舵偏为24°时的幅值,而是分离前期俯仰角小幅增加后,分离中后期持续增加,产生了不利分离俯仰角,分离品质较差。
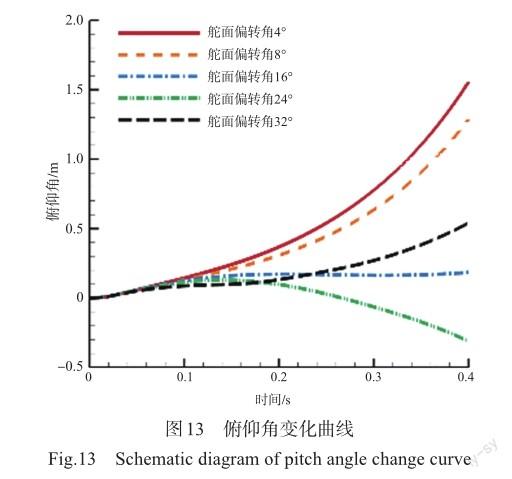
图14为滚转角变化曲线,可以清楚地看出,当舵偏为4°和8°时滚转角的变化量相对较小,整体变化趋势相反。当舵偏大于16°时,滚转角的幅值呈不断增加的趋势,与俯仰角的变化曲线不同,滚转角的变化呈正比增加的趋势,舵偏越大,滚转角的变化量越大。图15所示为偏航角变化曲线,不同的舵面偏转角下,偏航角均呈不断增加的趋势,幅值变化相对较为接近。
由于外挂物在分离过程中,对分离品质影响较为重要的是沿Z方向上的位移变化和俯仰角的变化量。综合以上分析:若从俯仰角的变化曲线出发,综合最优分离品质与战场毁伤性能,对此类斜波舵面偏转律进行设计时,选择最大舵面偏转的幅值为24°较为合适。尽管舵面偏转为16°时俯仰角的幅值变化最小,但其战场毁伤性能不是最优的。在下文中若无其他说明,均选择24°作为最大偏转角。
下面对比一下斜波函数控制舵面与未加控制时外挂物飞行姿态变化情况。由于单体投放过程中,无相邻弹体的干扰,偏航角与侧向位移对分离品质的影响较小,因此下文仅对沿X方向和Z方向的位移、俯仰角与滚转角的变化曲线进行分析。
图16与图17分别为沿X方向上的位移变化曲线和沿Z方向上的位移变化曲线,其中实线是未加控制的弹体位移变化曲线,虚线是加入舵面控制律后的位移变化曲线。可以清楚地看出,当舵面发生偏转后,舵面的偏转会增加相对于来流的迎风面积,因此有控状态下沿X方向上的相对位移变化量要大于无控状态下沿X方向下的相对位移变化。对于沿Z方向的相对位移变化曲线,为使弹身低头产生负迎角,尾舵进行正舵偏角偏转,产生向上的法向力,因此有控状态下沿Z方向上的位移变化要小于无控状态下沿Z方向下的相对位移。
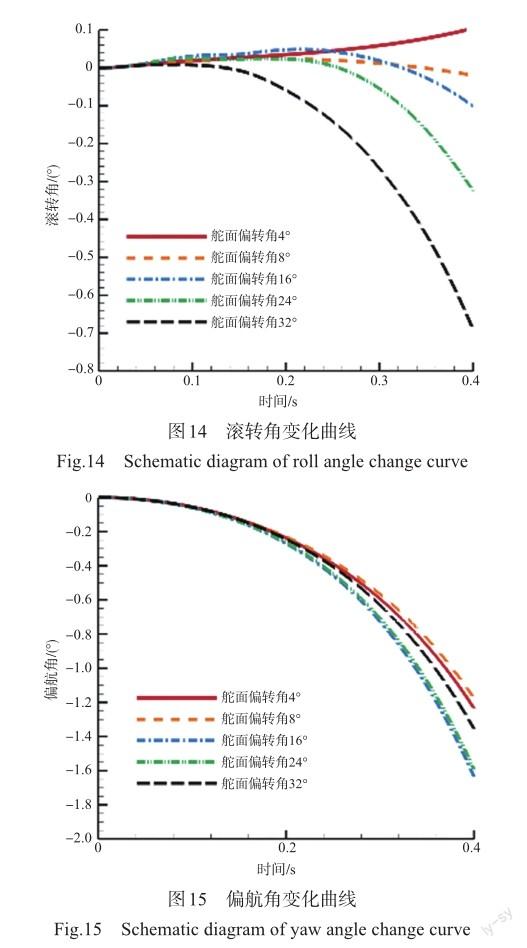
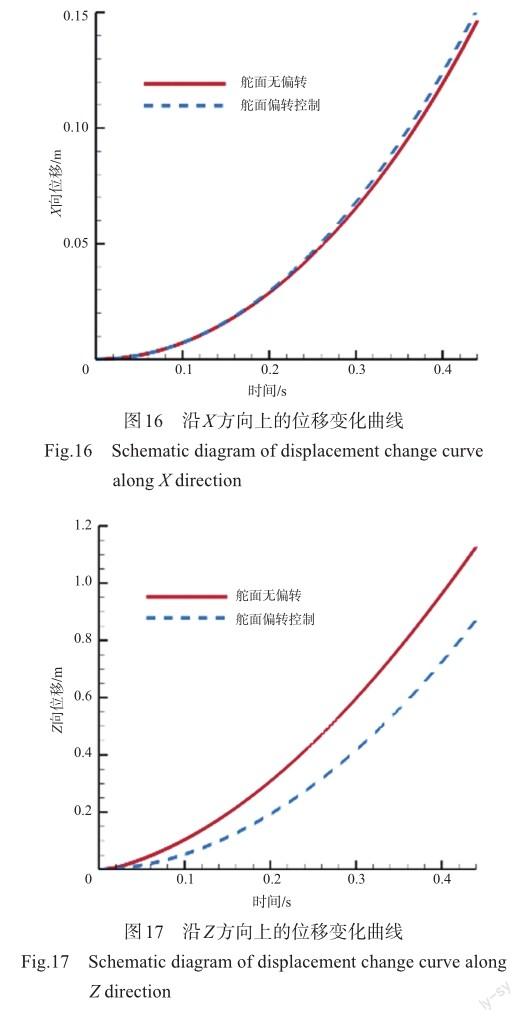
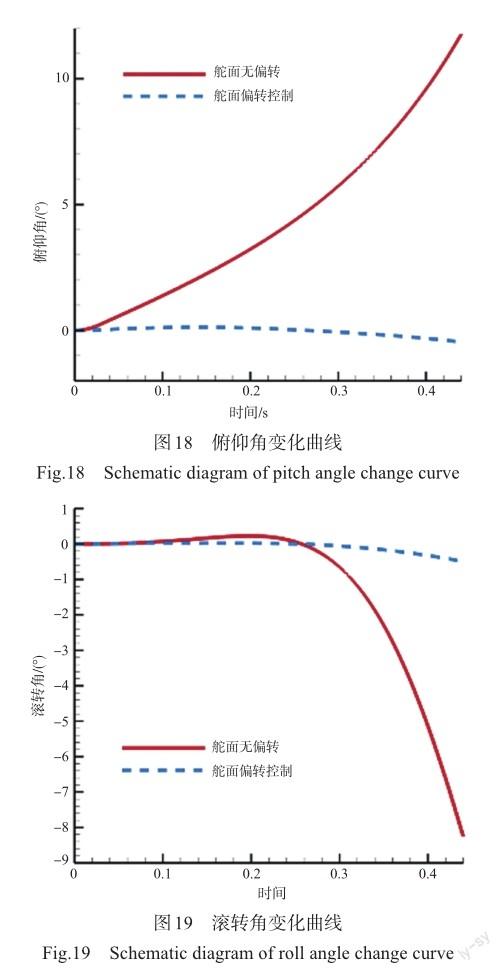
图18与图19分别为外挂物分离后的俯仰角与滚转角变化曲线,其中实线是未加控制的弹体姿态角变化曲线,虚线是加入舵面控制律后的姿态角变化曲线。可以清楚地看出,采用舵面偏轉的方式进行控制,起到了一定的效果,正向打舵后,对外挂物的抬头趋势起到了一定的抑制作用,产生了低头力矩,使外挂物分离后的俯仰角呈反向不断增加的趋势,从而提升其战斗毁伤性能;同时,当添加舵面控制后,外挂物分离时的滚转角得到了抑制。
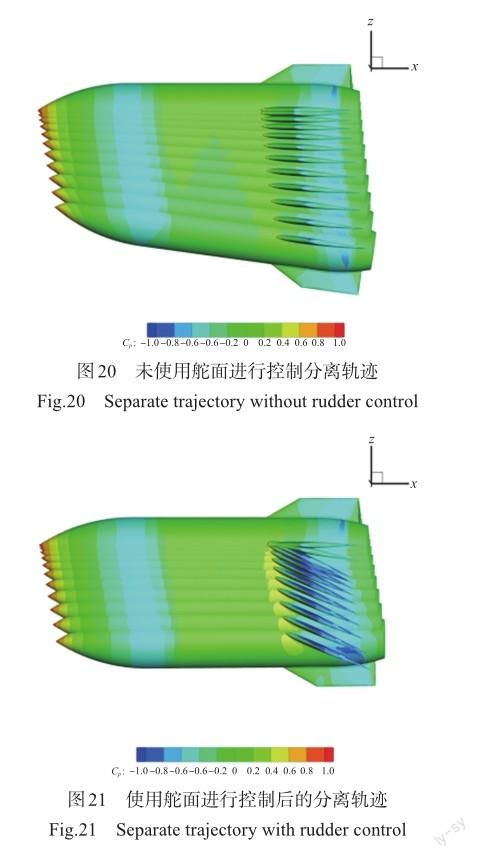
图20和图21所示分别为外挂物在分离阶段未使用舵面进行控制和使用舵面进行控制后的外挂物分离轨迹的示意图。从图中可以清楚地看出,未使用舵面进行姿态调整时,在初始绕质心不对称的弹射力的作用下,外挂物的俯仰角逐渐增加,最后可能会因为迎角过大而使其失去战斗毁伤效能,或者是与挂架发生碰撞,威胁载机安全。而加入舵面控制机构能够使外挂物在分离前期俯仰角变化较为平缓,分离中后期阶段呈不断低头的趋势,从而提高其安全分离品质与战斗毁伤性能。
3 结束语
以美国阿诺德工程发展中心(AEDC)外挂物标准分离模型作为典型算例,使用搭建的气动/运动/控制数值虚拟飞行仿真平台进行了自由投放模拟与舵面控制规律仿真研究。
本文设计了一种合理高效的舵面偏转函数,最后将所设计的控制律函数应用于外挂武器分离过程中。仿真结果表明,所使用的舵面偏转控制机构能够有效改善外挂物在分离过程中的姿态变化较为剧烈的现象,其分离安全性与分离品质得到有效提升。发展的基于舵面控制的外挂物分离仿真方法能够处理复杂运动边界的非定常问题,检验飞行控制律,具有一定的工程价值。
参考文献
[1]Sahu J.Time-accurate calculations of free-flight aerodynamics of maneuvering projectiles[C].DoD High Performance Computing Modernization Program Users Group Conference,2007.
[2]Sahu J. Time-accurate numerical prediction of free-flight aerodynamics of a finned projectile[J].Journal of Spacecraft & Rockets,2013,45(5):946-954.
[3]Costello M,Gatto S,Sahu J.Using CFD/RBD results to generate aerodynamic models for projectile flight simulation[C].AIAA Atmospheric Flight Mechanics Conference and Exhibit, 2007.
[4]Schütte A,Boelens O J,Oehlke M, et al.Prediction of the flow around the X-31 aircraft using three different CFD methods[J]. Aerospace Science and Technology,2012,20(1):21-37.
[5]Dean J, Clifton J, Bodkin D, et al. High resolution CFD simulations of maneuvering aircraft using the CREATE-AV/ Kestrel solver[C].AIAA Aerospace Sciences Meeting Including the New Horizons Forum & Aerospace Exposition,2013.
[6]张涵信,袁先旭,叶友达,等.飞船返回舱俯仰振荡的动态稳定性研究[J].空气动力学学报,2002,20(3):247-259. Zhang Hanxin,Yuan Xianxu,Ye Youda, et al.Research on the dynamic stability of an orbital reentry vehicle in pitching[J]. Acta Aerodynamica Sinica,2002, 20(3):247-259.(in Chinese)
[7]杨云军,崔尔杰,周伟江.细长三角翼滚转/侧滑耦合运动的数值研究[J].航空学报,2007,28(1):14-19. Yang Yunjun,Cui Erjie,Zhou Weijiang.Numerical research on roll and sideslip coupling motions about a slender delta wing[J].Acta Aeronautica et Astronautica Sinica,2007,28(1):14-19.(in Chinese)
[8]索谦,王刚,李仑,等.基于变步长CFD/RBD方法的旋转弹轨迹仿真[J].航空计算技术,2014(4):86-90. Suo Qian,Wang Gang,Li Lun,et al.Trajectory simulation of a spinning projectile based on CFD/RBD computation method[J]. Aeronautical Computing Technique,2014(4):86-90.(in Chinese)
[9]曾铮,王刚,叶正寅,等.RBF整体网格变形技术与多体轨迹仿真[J].空气动力学学报,2015,33(2):170-177. Zeng Zheng,Wang Gang,Ye Zhengyin, et al.Enhanced RBF mesh deformation method and multi-body trajectory simulation[J].Ac‐ta Aerodynamica Sinica,2015, 33(2):170-177.(in Chinese)
[10]李孝偉,范绪箕.基于动态嵌套网格的飞行器外挂物投放的数值模拟[J].空气动力学学报,2004,22(1):114-117. Li Xiaowei,Fan Xuji.Sinulation of the release of store based on the moving chimera grid technique[J]. Acta Aerodynamica Sinica, 2004, 22(1):114-117.(in Chinese)
[11]马英杰.民用飞机抛放式飞行记录器分离过程[J].航空科学技术,2018,29(12):47-52. Ma Yingjie. Simulation research of separation of jettisoned FDR from civil aircraft[J]. Aeronautical Science & Technolo‐gy, 2018,29(12):47-52.(in Chinese)
[12]张勇勇,孙伟,曹亚雄. 轻型民用直升机适航审定状态气动噪声数值模拟[J].航空科学技术,2020(4):30-36. Zhang Yongyong,Sun Wei,Cao Yaxiong. Numerical simulation of the light civil helicopter aerodynamic noise in airworthiness certifiction status[J]. Aeronautical Science & Technology, 2020(4):30-36.(in Chinese)
[13]Allan M R, Badcock K J, Richards B E. CFD based simulation of longitudinal flight mechanics with control[R]. AIAA Paper, 2005.
[14]Schütte A, Einarsson G,Raichle A,et al.Numerical simulation of maneuvering aircraft by aerodynamic, flight mechanics and structural mechanics coupling[J].Journal of Aircraft,2009,46(1): 53-64.
[15]达兴亚,陶洋,赵忠良.基于预估校正和嵌套网格的虚拟飞行数值模拟[J].航空学报,2012,33(6):977-983. Da Xingya,Tao Yang,Zhao Zhongliang.Numerical simulation of virtual flight based on prediction-correction coupling method and chimera grid[J].Acta Aeronautica et Astronautica Sinica,2012,33(6):977-983.(in Chinese)
[16]李锋,杨云军,刘周,等.飞行器气动/飞行/控制一体化耦合模拟技术[J].空气动力学学报,2015(2):156-161. Li Feng, Yang Yunjun, Liu Zhou, et al. Integrative simulation technique of coupled aerodynamics and flight dynamics with control law on a vehicle[J].Acta Aerodynamica Sinica, 2015(2): 156-161.(in Chinese)
[17]席柯,袁武,阎超,等.基于闭环控制的带翼导弹虚拟飞行数值模拟[J].航空学报,2014, 35(3):634-642. Xi Ke, Yuan Wu, Yan Chao, et al. Virtual flight numerical simulation of the basic finner projectile with closed loop[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3) :634-642.(in Chinese)
[18]陈琦,郭勇颜,谢昱飞,等.PID控制器与CFD的耦合模拟技术研究及应用[J].航空学报,2016,37(8):2507-2516. Chen Qi, Guo Yongyan, Xie Yufei, et al. Research and application of coupled simulation techniques of PID controller and CFD[J].Acta Aeronautica et Astronautica Sinica,2016,37(8):2507-2516.(in Chinese)
[19]常兴华,马戎,张来平,等.基于计算流体力学的“虚拟飞行”技术及初步应用[J]. 力学学报,2015(4):57-65. Chang Xinghua,Ma Rong,Zhang Laiping, et al.Study on CFDBASED numerical virtual flight technology and preliminary application[J]. Chinese Journal of Theoretical and Applied Mechanics,2015(4):57-65.(in Chinese)
[20]阎超.计算流体力学方法及应用[M].北京:北京航空航天大学出版社,2006. Yan Chao.Computational fluid dynamics methods and applica‐tions[M].Beijing:Beihang University Press,2006.(in Chinese)
[21]张来平,邓小刚,张涵信.动网格生成技术及非定常计算方法进展综述[J].力学进展,2010,40(4):424-447. Zhang Laiping, Deng Xiaogang, Zhang Hanxin. Reviews of moving grid generation techniques and numerical methods for unsteady flow[J].Advances in Mechanics, 2010, 40(4):424-447.(in Chinese)
[22]靳晨暉,王刚,陈鑫,等.非结构嵌套网格中的一种改进型径向基函数插值方法[J].航空工程进展,2019,10(5):681-690. Jin Chenhui,Wang Gang,Chen Xin, et al.An improved radial basis function interpolation method in unstructured nested grids[J].Advances in Aeronautical Sciences and Engineering, 2019, 10(5):681-690.(in Chinese)
[23]Heim E. CFD wing/pylon/finned-store mutual interference wind tunnel experiment[R].AEDC-TSR-91-P4, 1991.
Research on External Store Sparation Simulation method Based on Rudder Surface Control
Jin Chenhui1, Li Dian1, Wang Zehan2, Chen Xin3
1. Key Laboratory of Aerodynamic Numerical Simulation, AVIC Computing Technique Research Institute, Xi’an 710068, China
2. Shanghai Aircraft Design and Research Institude ,Shanghai 201210, China
3. Northwestern Polytechnical University, Xi’an 710072, China
Abstract: Control of the rudder surface is a typical multi-disciplinary coupling problem. The aerodynamic performance, flight performance and control performance need to be considered as a whole for research and analysis.This paper is centered on three key technical difficulties in numerical virtual flight: Coupling solution of Computational Fluid Dynamics(CFD) and Rigid Body Dynamics(RBD); Efficient mesh overset technology; Multi-disciplinary coupled solution of aerodynamics/motion/control of Flight Control System(FCS). Simulation results show that through the control of the rudder surface, the phenomenon that the external object has a more severe attitude change during the separation process is effectively improved, and the separation safety and separation quality are improved. The developted simulation method of external object separation based on rudder surface control can deal with the unsteady problems with complex moving boundaries,test flight control law,which has good engineering application value.
Key Words: flight simulation; multi-disciplinary coupling; overset grid; control of the rudder surface; separation quality