
类矩形盾构隧道施工测控技术研究
2023-11-01 12:50姜雷雷胡尚衡徐教煌
测绘通报 2023年10期
姜雷雷,胡尚衡,徐教煌
(1. 浙江华展工程研究设计院有限公司,浙江 宁波 315000; 2. 宁波市轨道交通集团有限公司,浙江 宁波 315012)
随着城市的不断发展,城市轨道交通作为主要公共交通工具,线路大多数遍布城市主要区域,地下空间的合理利用必将成为城市发展的趋势。现阶段采用的施工形式以圆形盾构隧道为主,普通圆形盾构若按双峒双线布置,横向空间占用较大,很可能侵入周边建筑基础,不仅在施工阶段带来社会影响,运营阶段也存在振动噪声污染的隐患。若按单峒双线设置,大直径盾构将造成车站加深,给后续线网建设带来困难;若采用引进的双圆盾构,沉降控制方面尚需付出更大努力。因此,需寻求一种新技术,以减小隧道占用地下空间的范围和降低周边环境影响,类矩形盾构施工技术应运而生。为此量身定做的类矩形盾构可节约27%(相比双峒双线)~36%(相比单峒双线)地下空间资源,且针对性强化了施工阶段的沉降控制能力和运营阶段的结构自稳性,有利于地下空间后续开发[1]。
类矩形隧道相较于其他断面隧道,如双线单圆隧道、大直径圆隧道等,空间布置更加合理,空间利用率更高。类矩形隧道对周边环境影响范围更小,因此可以减小拆迁范围,从而大幅降低建设成本,而且一次形成双线隧道,合理安排下能够节省工期。
类矩形隧道断面为4个圆弧组成的图形,其管片、盾构机、盾构钢环均为4个圆弧组成的图形,盾构施工、姿态控制、行车限界都与圆形隧道不同,因此原有的测量方法也存在一些局限性。针对三维激光扫描技术,国内外学者均作了大量的研究[2-12],针对类矩形的特殊断面,使用三维激光扫描仪进行断面测量,可以规避常规断面测量的局限性。本文通过结合类矩形盾构隧道的断面特点,总结适合类矩形盾构隧道施工测量的一套方法,为类矩形盾构隧道施工提供质量保障。
1 与圆形盾构隧道对比
传统圆形盾构洞门钢环中心位置检测方法是以联系测量后的地下平面和高程控制点为基准,均匀采集数个钢环上点的三维坐标,然后进行拟合运算解算出洞门中心。而类矩形盾构钢环与类矩形隧道类似(如图1所示),为4个圆弧拼接而成的12.31 m×7.75 m的类矩形,无法采用普通方法测量与拟合。因此采用两侧挂铅垂线的方法确定最边缘点的三维坐标,然后求取两坐标平均值确定洞门钢环的中心坐标。
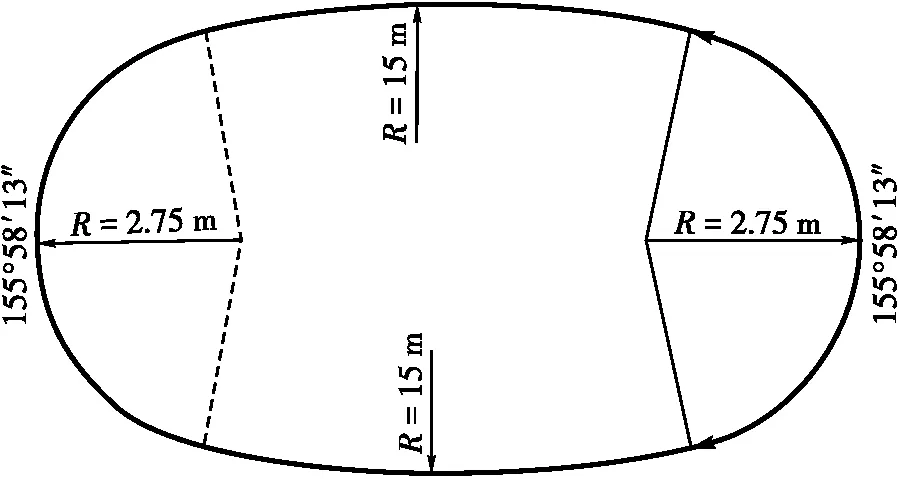
图1 类矩形盾构隧道断面
由于类矩形盾构管片结构不再是原有的圆形结构,原有的确定隧道中心位置的方法不再适用,因此利用全站仪测量放置于立柱中部手孔位置的小棱镜坐标作为管片中心坐标,从而根据所得坐标、立柱厚度、小棱镜参数及隧道设计轴线计算出成型管片实际姿态偏差。后期还要测量管片的旋转角,具体测量方法为:测量管片设计时与左右线同等高度的手孔标高,利用标高差除以手孔距离,从而计算出旋转角度,旋转度的限差一般为<0.6°。
由于类矩形隧道为特殊的隧道类型,一次性形成左右线两条隧道,而左右线由于中间立柱的原因不能完全互相通视,因此对隧道内控制网需要两侧分别布设。
不同于圆形可以均匀分散外力,类矩形对于垂直方向的应力无法正常抵消,因此在管片中采用立柱分担应力,而盾构机盾壳无法抵消这部分应力,故而会出现盾尾变形的情况,因此需要对类矩形盾构盾尾变形进行监测。
2 类矩形隧道关键测控技术优化
2.1 类矩形盾构盾构姿态及管片测量方法
类矩形盾构盾构姿态测量采用基于测量机器人盾构姿态自动采集系统[13],系统工作原理采用棱镜加传感器模式,如图2所示。通过在类矩形隧道左右两侧各设置1个双轴传感器,相比传统圆形盾构隧道姿态测量不仅可以提高盾构转角测量精度和频率,而且可同时获取两条线路各自的盾构姿态。
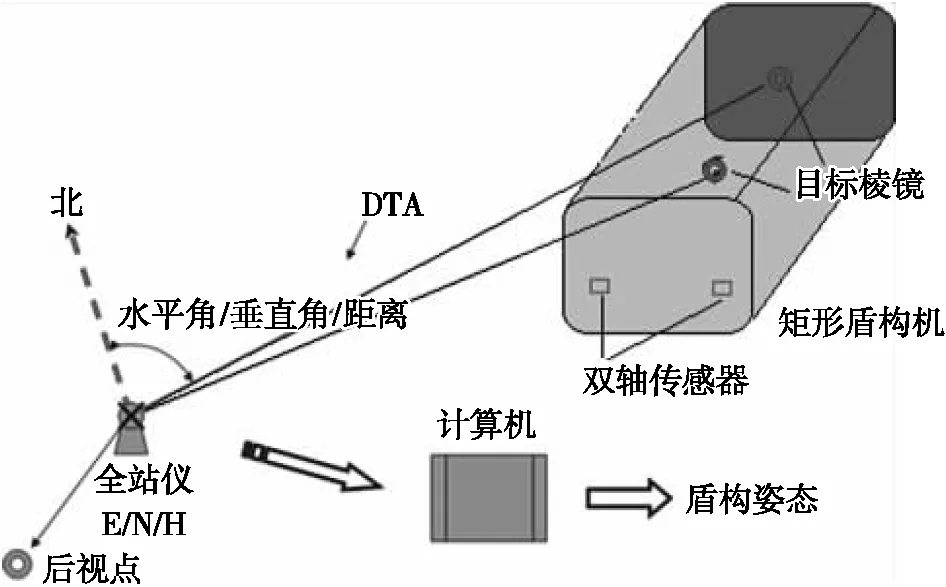
图2 类矩形隧道自动测量原理
通过信息化管控技术,开发平台对应的端口与界面,专门针对类矩形隧道特点,实时监控盾构姿态信息,以双隧道姿态实时显示对历史姿态信息的采集、存储,形成记录并自动形成变化曲线,各项数据可以随时调阅,为后期分析提供依据。如图3所示。
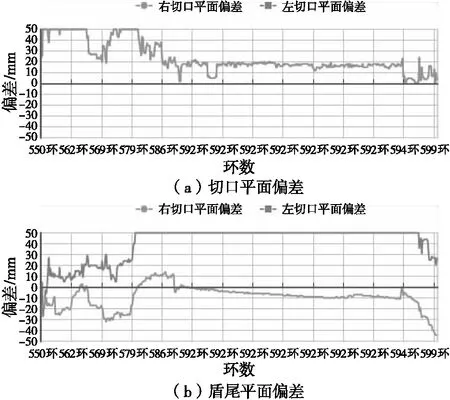
图3 类矩形盾构机姿态历史曲线
为指导类矩形盾构推进,采用导向系统不间断地对盾构姿态进行监测,根据对应环的盾构姿态及测得的管片与盾构的间隙变化,求出管片姿态。同时类矩形盾构受到转角影响时,管片与盾尾间隙的关系不同于圆盾构,测定盾尾间隙的位置布置如图4所示,同时测量8个点位。

图4 盾尾间隙测量位置
由于类矩形盾构断面尺寸比圆形盾构要大,行车限界与管片之间的距离相应也有所扩大。普通圆形隧道的限界富余量约为150 mm,而类矩形隧道富余量在240 mm以上,因此在保证行车限界的情况下,类矩形盾构隧道偏差允许值也相应的放宽。具体见表1—表2。
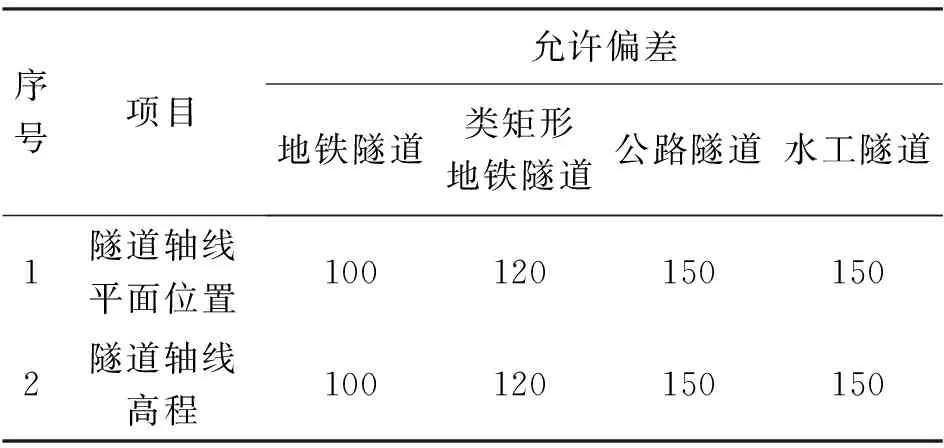
表1 隧道轴线平面位置和高程偏差允许值 mm
2.2 类矩形盾构隧道控制网布设及测量限差优化
推进过程中选择导向装置所在一侧布设平面及高程控制网,其中,平面控制网为导线网形式,为盾构推进提供测量基准。隧道贯通后,两侧布置控制点,分别进行贯通测量,为断面测量及后期测量提供控制点。控制点布设位置如图5所示。

图5 类矩形隧道测量控制点布设
根据城市轨道交通测量规范的要求,地铁隧道贯通测量中误差应不高于平面50 mm、高程25 mm[14]。而对于类矩形盾构隧道,由于断面面积大,空间富余量高,因此对原有标准适当放宽(见表3)。
表3 盾构隧道贯通测量中误差 mm
2.3 类矩形盾构机盾尾变形监测
由于类矩形盾构盾尾形状为椭圆,在盾构直径大、埋深较深,同时掘进距离较长的情况下,对于盾尾的稳定需承受较大的考验。故而在盾构掘进过程中必须对盾尾的变形情况跟踪监测,在测量数据变化较小、盾尾形状稳定的情况下,每次测量数据报于技术部门备案。在测量数据显示盾尾变形较大时,及时通知技术部门一起上报项目总工程师解决。
盾构机尾部的变形将直接影响盾尾的密封、管片的拼装质量甚至是整个隧道工程的安全,因此,非常有必要定期对盾尾变形情况进行监测。根据类矩形盾构机特点,在盾构机正常掘进时每20~30环监测一次,在工程因各方面因素停工且盾构机还位于隧道内时每1周测量一次,根据类矩形盾构机特点采用测量横竖径方法进行监测,通过对比每次横竖径数据变化情况得出类矩形盾构机盾尾变形情况。横径测量原理为采用全站仪极坐标法,通过采集左边点、右边点及中心的坐标反算距离,竖径测量原理采用几何水准法,测量顶部与底部的高差即为竖径,测量示意如图6和图7所示。

图6 横径测量
2.4 类矩形隧道断面测量优化
针对类矩形的特殊断面,使用三维激光扫描仪进行断面测量,可以规避常规断面测量的局限性,由于类矩形隧道工作空间狭长,且左右线中间由立柱隔开,左右线无法通视,因此左右线独立进行三维激光扫描。
三维激光扫描每个测站扫描的点云数据都是独立的自由坐标系统,将每测站点云数据转换到施工控制坐标系,这一过程称为点云拼接,也是三维激光扫描数据处理和作业方式选择的关键技术。点云拼接一般是采用公共点将不同测站的点云数据先整体拼接到同一自由坐标系下,然后通过控制点转换到施工控制坐标系下。对于隧道工程,由于隧道狭窄的特点,每测站扫描的有效点云范围有限,扫描一个完成的隧道需要的测站数较多,如通过公共点进行搭接的点云拼接方式工作量较大,故本文采用的是点云绝对定位法[15]。
从测量原理上三维激光扫描仪可以看作是一台高速动态测角、无棱镜测距的高性能全站仪。已知扫描仪中心坐标和一个定向靶球坐标,即可将一测站点云数据从独立的自由坐标系统定位到控制坐标系,通过在扫描仪两侧各加装一个测绘用标准圆棱镜,两个棱镜的坐标算数平均值即为扫描仪中心坐标;定向靶球内部加装一个标准棱镜,而定向靶球的球心与加装的棱镜中心一致,通过全站仪测出3个棱镜在隧道控制坐标下的坐标,即可计算出扫描仪中心坐标和定向靶球坐标,将每测站扫描的数据转换到隧道控制坐标系下后即可实现每测站点云数据的定位,这就是绝对定位法的点云拼接原理。
采集完成后利用Amberg Tunnel进行数据处理,数据处理步骤如下:
(1)参数设置。输入平曲线、竖曲线、横坡等设计参数。
(2)点云降噪处理。通过设置与理论断面固定距离、使用剪切线和剪切角过滤噪点数据,一测站点云过滤前后效果如图8所示。
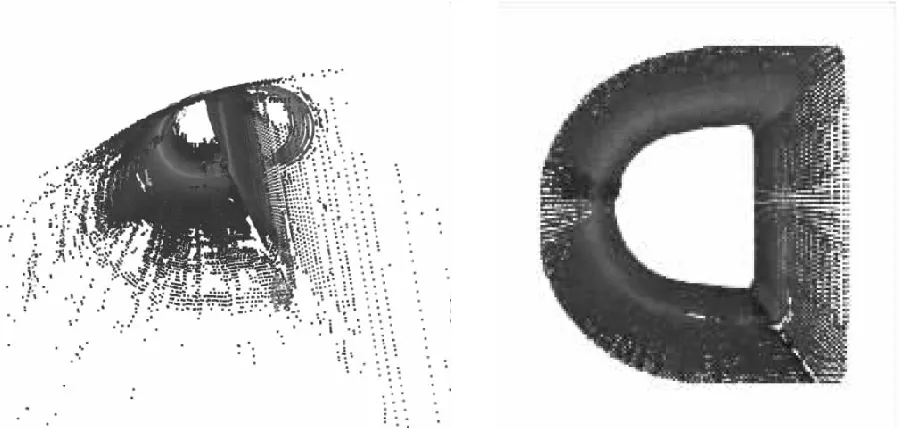
图8 点云过滤前后效果
(3)数据处理。设置点云采样间隔为0.5 cm,点云数据与理论模型偏差彩色影像如图9所示。
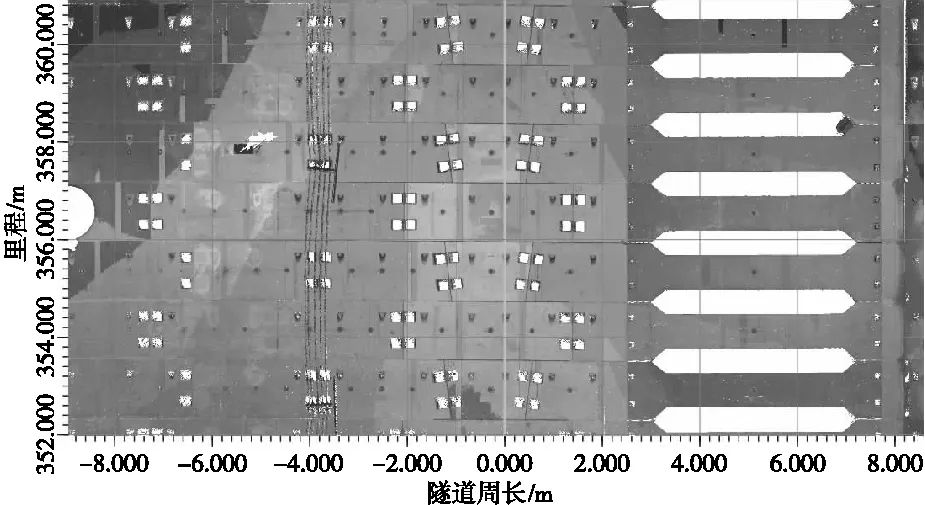
图9 偏差值灰度影像
(4)断面提取。可根据需求提取出任间隔里程(最小为1 cm间隔)或指定里程的断面成果,成果偏差示意如图10所示,断面成果为全断面数据,可根据需求设站点云密度,并可以计算出中间立柱的垂直度。
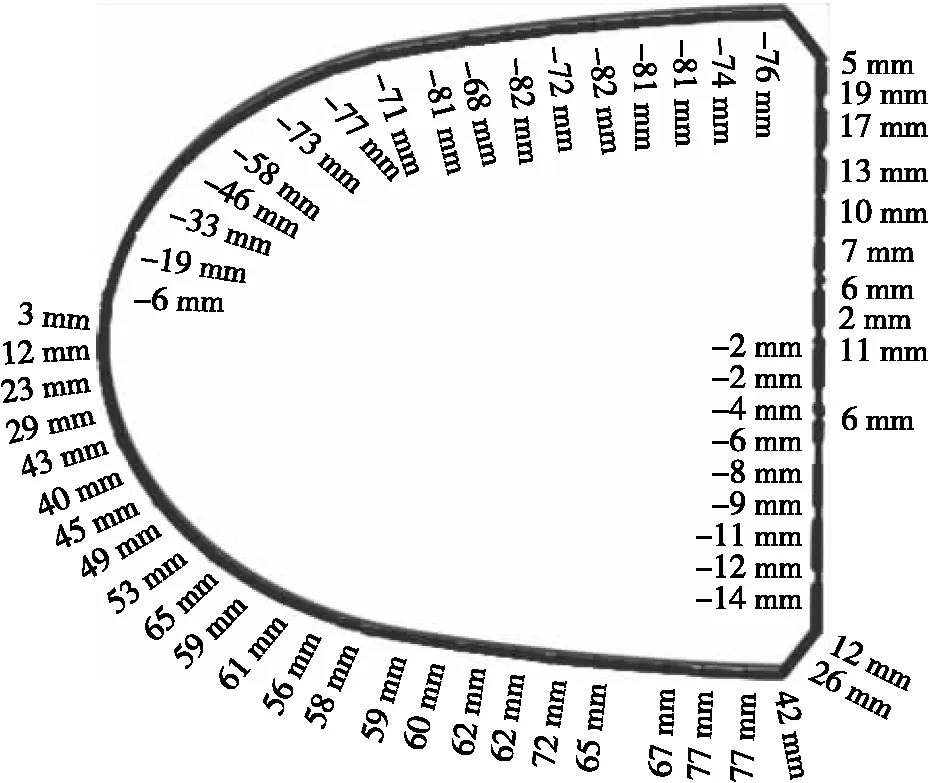
图10 类矩形断面测量成果
(5)对提取的隧道断面数据进行分析。由于类矩形盾构隧道的特殊性,施工过程中容易形成不同半径搭接处管片的错缝,正常的人工测量难以识别,更无法精确地测量出错缝的具体位置及大小,本文试验通过同一断面数据的突变原则准确地分析错缝的位置与大小,实现了错缝检测的效果.
(6)隧道中心线的提取。由于该区间类矩形断面为左右两侧为角度155°58′18″、内半径为2.75 m的圆弧,通过最小二乘拟合法拟合出圆弧的圆心,即为线路中心线坐标。
由本次类矩形盾构隧道检测试验可得出,三维激光扫描不会因为断面的特殊性而无法检测,且测量成果多样化,完全满足常规的隧道检测需要。同时可根据断面的特点提取关键部位的关键信息,达到传统测量方法无法快速获取的空间信息,且可直观准确地表达出相关测量成果的三维可视化。
3 结 语
本文结合类矩形的断面特点,针对部分圆形盾构隧道施工测量方法无法直接应用于类矩形盾构的问题,研究原有测量方法原理,结合类矩形盾构隧道特点及其他新型测量手段,形成了整套的类矩形盾构测量方法,同时对相应的控制指标进行了优化,使其适应度更高。信息化管控平台也对类矩形盾构进行了针对性的开发,实现了类矩形盾构姿态、管片轴线等信息的可视化。针对类矩形的特殊断面,将三维激光扫描技术应用在其断面扫描中,解决了普通断面扫描技术无法准确提取单侧隧道中心的问题,成功完成了类矩形断面的测量提取工作。
猜你喜欢
学生天地(2020年3期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
工程建设与设计(2016年4期)2016-02-27
城市道桥与防洪(2013年10期)2013-03-11
