
移动背包三维激光扫描系统在陡岸水库测绘中的应用
——以白鹤滩水电站库区典型河段为例
2023-11-01 13:02张世明孙振勇郑亚慧师义成
测绘通报 2023年10期
叶 飞, 张世明, 孙振勇, 郑亚慧, 师义成
(1. 武汉天宝耐特科技有限公司,湖北 武汉 430043; 2. 长江水利委员会水文局长江上游水文水资源勘测局,重庆 400020; 3. 长江水利委员会水文局,湖北 武汉 430010; 4. 中国三峡建工(集团)有限公司,四川 成都 610095)
水文泥沙监测作为水利水电工程一项基础性工作,主要工作内容有河道固定断面观测、水库库岸和水下地形观测、拦门沙等各项水文泥沙因子监测等,可提供长时序、全要素的水库地理信息和水文水情基础数据,为水利工程建设、水库泥沙淤积观测、水库排沙、水库调度、水资源管理、防洪、航道整治与保护等工作发挥着重大作用[1]。水文泥沙监测工作具有观测时机集中、精度要求高、时效性强等要求[2]。金沙江流域下游梯级水库群河道属于山区峡谷地貌,地形陡峭,坡度较大,河道宽约数十米至数千米,河道蜿蜒复杂,植被覆盖率高,通视条件差,传统人工走测困难,效率低、成本高、风险源多,水库库岸地形信息监测难度较大[3-7]。
为提高水文泥沙监测库岸地理信息外业测绘效率和数据精度,本文以金沙江下游梯级水电站白鹤滩库区典型河段为研究对象,开展移动背包式三维激光扫描系统的验证测试。通过人工背载走测、搭乘测船绕测等方式采集边坡点云,使用高精度检验点进行精度分析,从数据精度、作业效率、安全性等维度,综合验证移动背包三维激光扫描系统在水文泥沙监测中的适用性[8-10]。
1 移动背包三维激光扫描系统
移动背包三维激光扫描系统(backpack laser scanning,BPSL)主要由高精度GNSS、惯导IMU、高分辨率相机、控制平板和背负设备构成。通过将SLAM与GNSS结合,可在多种复杂地形、弱信号条件下快速、便捷、低成本地采集目标物体的三维点云数据[11-15]。数据还可在手机等移动端实时显示,实现边采集边查看,扫描完成即可导出采集点云数据和运动轨迹。系统硬件设计轻巧便捷,还可以通过手持、骑行、车载、船载方式轻松进行采集数据。在数据采集过程中即走即测,测量技术人员经过的地方都能获取数据,适用性强。软件系统含数据解算软件和点云数据处理软件,可快速生产高精度赋色点云数据及影像,点云处理软件支持数据配准、分割与合并、点云分类、点云抽稀等功能。本文试验设备主要参数见表1。

表1 移动背包三维激光雷达扫描系统主要参数
2 白鹤滩水电站库区试验
为验证移动背包三维激光扫描系统在水文泥沙监测中的适用性,测试其工作效率和数据精度,本文选取了白鹤滩库区巧家河段选择代表性的地形区域进行验证测试。地形区域位于金沙江下游梯级水电站白鹤滩库区,坝址上游30~35 km,右岸为云南省巧家县,左岸为四川省凉山彝族自治州宁南县境内。测区海拔约700~900 m,既有高山地、山地,也有平缓地段,地貌涵盖树林、灌木丛、草地、耕地、道路、人工构筑物等,具有代表性。
2.1 数据采集
(1)对试验区域内码头、道路、树林地、消落带分别进行人工走测,共进行6次数据采集,计划数据采集总时长1 h,扫描面积约0.2 km2。
(2)选择试验区垂直河流方向进行人工走测,进行一次数据采集,计划数据采集总时长20 min,保证河道断面的点云数据抽取数据完整。
(3)选择试验区域内四川省宁南县境内,金沙江干流与支流黑水河汇合口处蛇岛,技术人员背负移动背包三维激光扫描系统,搭乘冲锋舟或者专用测船,保持激光雷达扫描系统视场角开阔,采集孤岛礁石蓄水位以下的消落带地形,完成两次绕岛数据采集,计划数据采集时长30 min。
试验区同时采用RTK、地面激光扫描系统和机载LiDAR获取比对数据,试验情况如表2、图1所示。移动背包三维激光扫描系统试验外业数据总时长2 h,扫描有效面积为0.3 km2;点云106 783 098个;创建作业全景视频6份。

图1 不同场景的数据采集现场

表2 比对试验情况
2.2 数据处理
视频原始数据由软件自动解算拼接完成,得到全景视频文件。解算点云数据主要包括点云赋色、GNSS数据平差(如果有)、坐标系配置、高精度点云解算、点云数据分类和点云数据滤波。一般的,软件电源解算流程默认为GNSS+SLAM,可解算生成具有真实地理坐标的高精度点云数据。点云分类可使用“一键”提取点云类别功能,直接将点云数据分类成地植被、水体、建筑物等类别,利用该功能即可剔除不需要的点云数据(如植被、桥梁等)。
金沙江库区主要为裸露岩石地形地貌,消落带库岸地形的点云分类和点云处理相较于其他测量显得极为便捷。点云滤波主要对稀疏植被、桥梁、悬空地物(码头构筑物)进行处理,其中,稀疏植被可结合赋色影像由软件自动处理,其他人工建筑物需要人工干预处理,且赋色点云对于勾绘地物更为直观。本文试验区域的内业效率与传统作业效率因地形不同各有优劣,林地稍劣,码头相当,消落带和蛇岛区域则明显优于传统作业手段,不再详述。码头区域点云数据处理前后效果如图2所示。
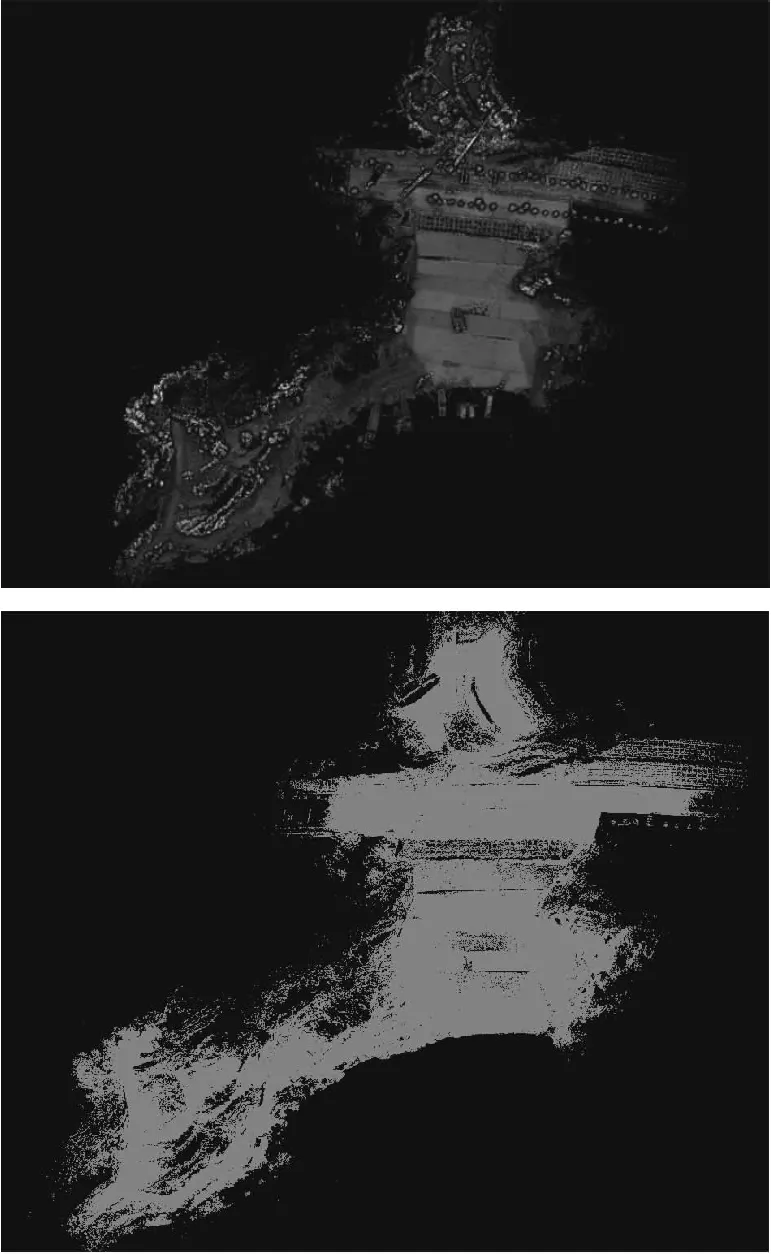
图2 点云数据赋色与点云数据滤波效果(码头)
2.3 工效对比分析
试验区域同时采用了其他常规测量方法进行观测,对比见表3。
表3 外业工作时长统计对比 min
由表3可得,移动背包三维激光扫描系统在作业效率上优势明显,人工走测相较于全站仪或RTK测记法最大提高了3.75倍,乘坐测船绕测则提高了5.25倍。金沙江库区气象时空变化剧烈,白鹤滩水库一年内有200余天为大风天气,基本涵盖了汛前、汛后所有观测时机。峡谷地形加剧了强风切变带来的影响,考虑安全和成本,无人机机载激光雷达测绘并不适用。直升机等大型机载雷达测绘效率高,可用于全库长河段地形监测,但对于码头、拦门沙监测、近坝区监测等局部地形而言,前期空域报备时间长、飞行成本太大。移动背包三维激光扫描系统的机动性正好弥补了上述不足。
3 数据分析
精度评定采用移动背包三维激光扫描系统与常规方法获取数据进行比较,并计算中误差。精度比测内容包括地物特征点的平面和高程误差,随机高程点的高程中误差、截取断面拟合程度与面积较差。
3.1 平面精度分析
将点云数据与常规方法获取的地形图进行融合,选取测区内的花坛、路灯、砼坡、道路边线等特征物分别提取点云数据和碎部点进行比较,统计差值并计算中误差。特征物平面共选取213点,经统计计算最大差值为0.063 m,最小值0.009 m,平均值为0.029 m,中误差为0.024 m,如图3所示。

图3 点云平面精度统计(码头)
3.2 高程精度分析
随机均匀选择测试区域内高程碎部点数据,在融合图上随机选取点,拾取半径小于0.1 m。统计两者的高程差值并计算中误差。树林地点云高程较差精度统计如图4所示,经统计计算最大差值为0.013 m,最小值0.005 m,高程中误差为0.044 m。
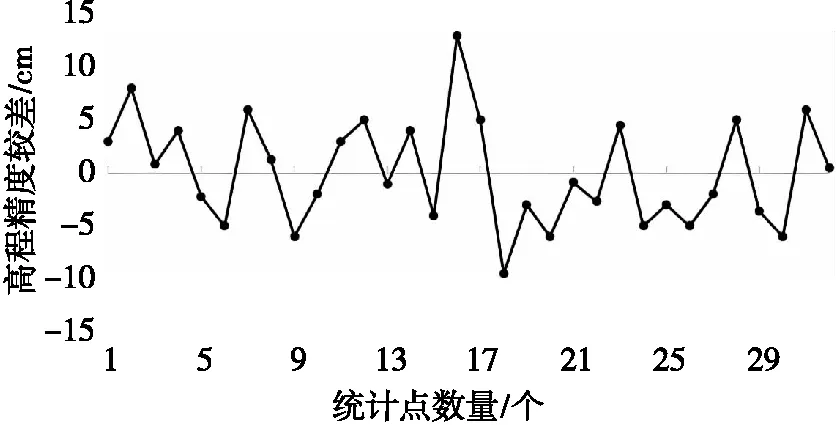
图4 点云高程精度统计(林地)
3.3 断面精度分析
在点云数据文件上按离差0.1 m范围提取点云数据生成断面,与传统方法测得断面进行比较,面积相对较差分布如图5所示。共统计断面392个,各断面面积较差均小于2%,相对面积较差为0.24%,小于规范技术要求[16]。

图5 断面面积相对差分布
4 结 语
试验结果表明,采用移动背包三维激光扫描系统平面中误差为0.024 m,高程中误差为0.044 m,相对面积较差为0.24%,满足水文泥沙监测的测量精度要求,但在高程精度上仍然存在一定的误差。可在以下两个方面提高测量精度:一是尽量缩短测量距离,限制在背包式激光雷达扫描系统的标定量程50%以内为宜;二是针对地物地貌单一的消落带区域,可增设靶球、觇牌等特征物,提高点云配准精度。
采用移动背包三维激光扫描系统进行库岸地理信息监测,外业效率是常规观测方法的2~5倍。背包式激光雷达扫描系统尤其适合桥梁、狭窄道路、乔木林侧作业,是对地面三维激光扫描测量的一种较为有效的补充手段。
此外,考虑水库蓄水后江面加宽,大风大浪天气常态化,背包式激光雷达扫描系统可以有效弥补传统对岸观测作业和机载激光雷达测绘作业的不足。作为一种非接触式测量技术,具有更高的安全性,可有效高陡边坡走测困难的问题。
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08
当代陕西(2020年23期)2021-01-07
农民文摘(2019年11期)2019-11-15
摄影之友(影像视觉)(2017年10期)2017-11-07
作文周刊·小学一年级版(2016年42期)2017-06-06
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
童话世界(2017年11期)2017-05-17
电力自动化设备(2015年4期)2015-09-28
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
