
基于视场角原理的淤地坝技术指标测量方法
2023-11-01 12:50杨翔惟金美君田园盛
测绘通报 2023年10期
杨翔惟,金美君,罗 珂,马 晨,王 康,田园盛,张 平
(黄河水利委员会晋陕蒙接壤地区水土保持监督局,陕西 榆林 719000)
黄土高原水土流失问题突出,在各级沟道中,为拦泥淤地而修建的淤地坝数量庞大,这些淤地坝在创造巨大效益的同时面临着安全运行管理等方面的重大考验[1]。淤地坝运行期间,在流域复杂的暴雨、洪水、地质环境下,一些指标数据早已发生变化,且坝体受各种外界条件影响使得筑坝材料各种力学参数产生变化,直接影响大坝边坡稳定,导致滑坡甚至溃坝[2-3]。淤地坝技术指标是工程设计的重要参数[4-6],更是淤地坝运行期评估坝体稳定性的重要依据,应精准掌握。由于部分淤地坝修建年代久远,设计资料残缺,淤地坝技术指标信息依赖于现场调查获取。
当前,淤地坝技术指标信息的收集和更新方法可概括为以下几类:①人工现场测量[7],利用坐标解析法和方格网估算淤地面积;利用坡度仪、全站仪等对坝坡比进行测量;利用皮尺、激光测距仪对溢洪道、明渠及输水涵管等长度类目标进行测量。该方式需持测量设备往返奔走测量,效率低下,且精度相对较低,在实践中存在困难。②无人机建模测绘[8-10],利用实景三维模型软件建立淤地坝正射或三维模型,通过遥感软件进行聚类分析等处理,可统计淤地坝坝体特征,提取技术指标信息,精度较高,但需要耗费大量的现场和后期处理时间及计算机资源,无法满足基数庞大的淤地坝调查需要。③利用DEM进行淤地坝调查[11],以航拍方式构建数字化地形,根据河道走向,分析淤地坝疑似区域,可大致明确淤地坝的数量、位置、高度及走向和淤地信息,但其方案设计和分析过程复杂,调查结果误差较大。
可见,现阶段缺少一种高效、精准的淤地坝技术指标现场测量方法,支撑淤地坝风险隐患排查、病险坝除险加固和老旧坝提升改造的基础调查工作。为解决以上问题,笔者在实践中提出一种基于视场角理论和RTK差分技术的测量方法,该方法主要包括无人机测量模型构建、特征图像采集与筛选、目标解译与数据提取和模型计算等环节。通过构建淤地坝长度、面积、高度和坡度4类数学几何模型,以期实现将繁杂的指标测量转化为简单的几何计算问题。
1 试验设计
1.1 测量原理
1.1.1 无人机相机视场角
如图1所示,以可视范围直径确定相机视场角,表征回传图像(图1中矩形区域)与取景范围(图1中圆形区域)间的几何对应关系。其中,∠θ为无人机的相机视场角,O、H分别表示无人机拍摄特征目标时的位置和高度,O′为无人机拍摄特征目标时在地面的投影点。因此,BO′的距离可根据三角函数公式H·tan(1/2θ)求得,继而得到AB之间的距离。
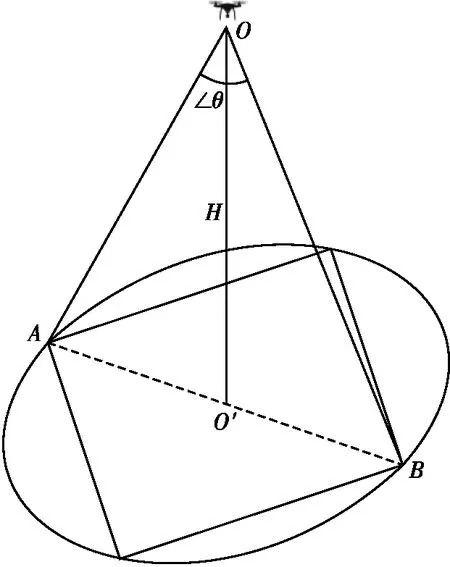
图1 无人机相机视场角原理
1.1.2 RTK差分定位技术
视场角原理的应用一直受无人机定位精度的掣肘,在以往实际中未能推广使用。随着RTK差分技术的发展,厘米级定位精度推动无人机视场角得以应用。本文正是基于此原理,建立准确的无人机与淤地坝之间的空间关系,通过正射淤地坝特征指标地物,获取拍摄的特征图像的比例尺关系。利用比例尺及无人机成像高度等信息即可获取任意特征指标的像素及其实际长度和面积,为代入相关模型计算提供基础数据。
以大疆精灵4 RTK无人机为例,收集淤地坝特征指标图像数据。该无人机搭载APAS3.0避障系统,图传系统基于OcuSync2.0,其飞行定位精度、相机参数、云台稳定性能均满足本方案技术要求。其中,悬停精度:垂直±0.1 m,水平±0.1 m;GNSS定位精度:垂直RMS 1.5 cm+1×10-6·D,水平RMS 1 cm+1 ×10-6·D;相机镜头视角为84°。
1.2 数学几何测量模型构建
1.2.1 长度类指标测量模型
利用无人机采集淤地坝长度类技术指标图像,在图像处理软件中目视解译淤地坝长度类特征目标,检测特征目标和图像对角线的像素长度。利用特征目标的像素长度乘以对角线实际长度与对角线像素长度的比值,即可得到淤地坝特征目标的实际长度,计算公式为
(1)
式中,L为特征目标实际长度;l′为特征目标像素长度;p为图像对角线像素长度(p为定值);H为无人机摄影高度;θ为视场角。
1.2.2 面积类指标测量模型
利用无人机采集淤地坝面积类技术指标正射图像,在图像处理软件绘制淤地面特征区域,检测占图像总像素的比例。基于长度类指标测量模型计算出图像对应的实际长度和宽度,通过淤地面像素占比乘以图像实际面积即可得到淤地面积,计算公式为
S=l×m×p
(2)
式中,S为淤地坝淤地面积;l为图像像素长度对应的实际长度;m为图像像素宽度对应的实际宽度;p为淤地像素个数占图像总像素的比例。
1.2.3 高度类指标测量模型
图2为高度类指标模型测量示意图,利用无人机采集淤地坝高度类技术指标正射图像,通过以下模型进行计算。
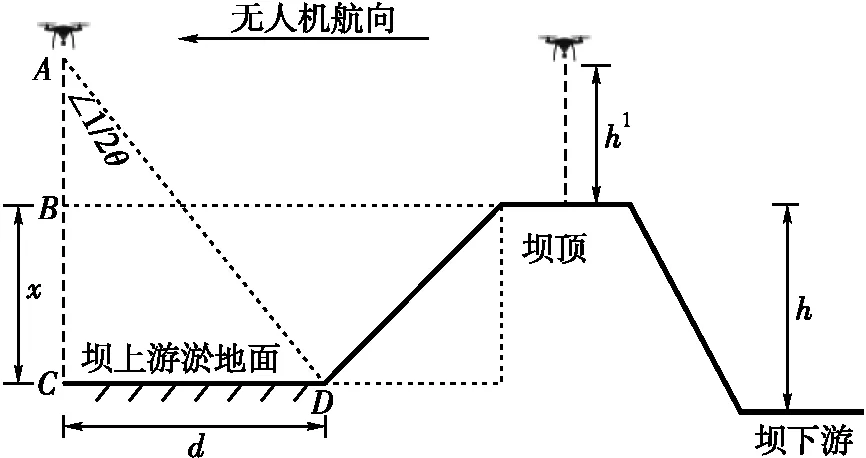
图2 高度类指标模型测量
淤积高程计算公式为
H=H′-d/tan(1/2θ)
(3)
式中,H为淤积高程;H′为无人机摄影位置的绝对海拔高度;h1为无人机坝顶起飞高度,θ为视场角;d为无人机摄影位置在淤面上的投影点C到上游淤面与坝坡交界线上点D的距离(CD垂直于交界线),可利用回传图像基于长度类指标测量模型获取。同理,当测量淤地坝坝高时,d表示无人机摄影位置在河床上的投影点到下游河床与坝坡交界线(或坝坡最低点)的最短距离。
在另一种实现方式中,淤积高程计算公式为
(4)
x=d/tan(1/2θ)-h1
(5)
式中,H0为坝顶高程,可利用海拔传感器在坝顶测得;h1为无人机坝顶起飞高度;x为淤面与坝顶高差;xi(i=1,2,…,n)为淤面与坝顶多次测量的高差。
1.2.4 坡度类指标测量模型
由于坝上游存在淤地,本文构建的上、下游坝坡坡比的测量模型存在一定的差异,具体模型构建如下。
1.2.4.1 上游坝坡坡比测量模型(存在淤地)
利用无人机采集淤地坝上游坝坡坡比技术指标正射图像,如图3所示,为存在淤地时上游坝坡坡比测量示意图。

图3 上游坝坡比(存在淤地)模型测量
令EF=x,EG=y,GH=a,GI=b,BE=c,AE=d,其中x,y未知,a、b可利用回传图像基于长度类指标测量模型获取。
c为坝高h与无人机初始飞行高度h1之和,d为坝高h与无人机最终悬停摄影高度h2之和,坝高h利用高度类指标测量模型获取。
c=h+h1
(6)
d=h+h2
(7)
由勾股定理可知
(8)
因ΔEGF~ΔHGJ,由相似三角形定理可知
(9)
又因四边形BEHJ~四边形AEIK,由相似多边形定理可得
(10)
根据三角函数可得
(11)
联立式(10)—式(11),可得x、y。得上游坝坡坡比为
(12)
1.2.4.2 上、下游坝坡坡比测量模型(不存在淤地)
利用无人机采集淤地坝上、下游坝坡坡比技术指标正射图像,图4所示为淤地坝不存在淤地时上、下游坝坡坡比测量。

图4 上、下游坝坡比(不存在淤地)模型测量
令EF=x,EG=e,GH=a,BE=c,其中x未知,e、a可利用回传图像基于长度类指标测量模型获取。
c为坝高h与无人机悬停摄影高度h1之和,坝高h可利用高度类指标测量模型获取
c=h+h1
(13)
因ΔEGF~ΔHGJ,由相似三角形定理可知
(14)
根据三角函数可得
(15)
即可求得x,继而可得上游坝坡坡比
(16)
1.3 特征图像采集与筛选
为提升淤地坝技术指标的模型测量精度,以现场交互采集和图像成像分析的方式,保证采集图像的合规性。采集图像需满足相应测量模型的飞行要求,按照既定的摄影位置和角度进行图像采集。在此基础上,对符合要求的目标图像的技术参数做进一步的检查,筛选出满足模型正射要求的图像。
1.3.1 现场交互采集
在图像采集过程中,按照既定的飞行要求,使无人机到达指定摄影位置,依照指定摄影动作,以人机交互的方式利用无人机图传画面进行图像采集,并依照飞行要求检查以下内容。
(1)采集淤地坝长度类、面积类技术指标图像时,检查图像是否完全呈现特征目标全貌。
(2)采集淤地坝高、淤面与坝顶高差等高度类技术指标图像时,检查摄影前云台相机是否正对淤地坝,摄影时图传画面的一边界与上游淤地面(或下游河床)和坝坡的交界线是否重合。
(3)采集淤地坝坡度类技术指标图像时,检查摄影前云台相机是否正对淤地坝,摄影时图传画面的一边界是否处在坝坡与淤地面的交界线和坝顶之间。
对采集的图像进行初步筛选,现场剔除画质模糊,曝光欠佳的图像,将满足要求的图像回传给飞控设备。
1.3.2 图像成像分析
通过飞控设备接收无人机返回图像,在服务端设备获取图像对应的俯仰角和翻滚角等飞行姿态信息,图像尺寸和视场角等拍摄参数,以及成像时的地理坐标和飞行高度等POS参数。由于拍摄参数、无人机的地理坐标和高度参数遵循EXIF编码标准,可利用PC机、服务器等设备通过EXIF信息查看器获取。
基于俯仰角和翻滚角,判断云台相机的成像方向,当成像方向与地面垂直时,视为回传图像合格并存储,否则随即发出指令给飞控设备,重新采集照片。在实际应用中,受高空气流、风速的影响,无人机无法处于绝对平稳状态。因此,在满足模型精度要求的前提下,可设置俯仰角和翻滚角阈值范围。一般情况下,无人机与云台的俯仰角之和介于-85°~-95°,翻滚角之和介于-5°~5°时,即可视为成像方向满足正射要求。
1.4 图像特征目标解译与数据提取
对满足成像要求的图像进一步提取无人机成像高度等信息,利用图像处理软件Digimizer提取特征目标的模型参数信息。基于软件可以快速目视解译图像中淤地坝长度类、面积类特征目标,自动检测其像素长度或面积,代入相关指标模型进行计算。
在应用时,针对图像中特征目标的选定操作,通过预设的测量工具进行选定。可解译、识别淤地坝长度类特征目标的像素起讫位置、路径,通过检测目标像素长度及其占比,基于长度类指标测量模型,获取图像中特征目标或任意两点间的实际距离。同时,可解译、识别淤地像素范围,通过闭合路径选定淤地区域,检测图像像素面积及其占比,基于面积类指标测量模型,获取图像中特征区域或任意范围的实际面积,为淤地坝坝坡比模型计算提供参数。
以淤地坝坝顶长、宽、输水涵管、明渠及淤地面积等技术指标为例,特征图像数据提取结果如图5、图6所示。
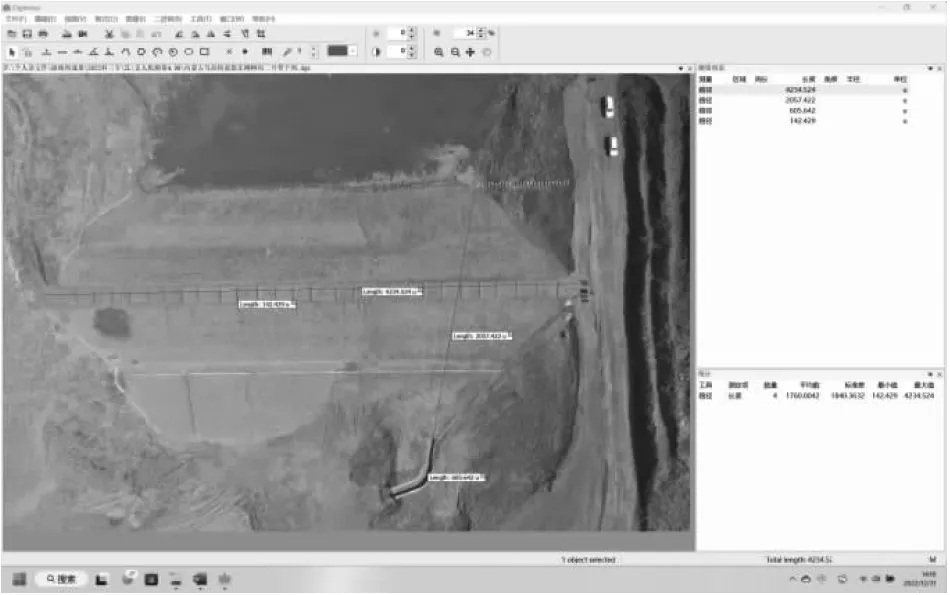
图5 长度类特征目标图像数据提取
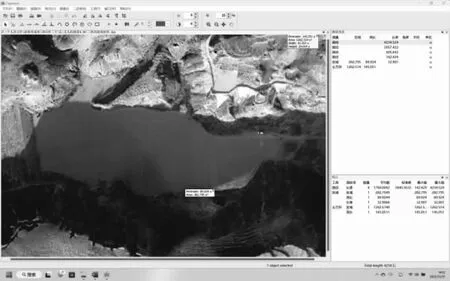
图6 面积类特征目标图像数据提取
2 结果与分析
为验证本文方法的可靠性,评价模型测量精度,笔者在陕西省榆林市北部地区选择了3座淤地坝进行模型实例测量验证。通过野外实地勘查,基于本文测量方法,以及当前野外测量技术条件下实用性较高的几种测量技术,对相关指标进行了测量试验和误差分析。
利用激光测距仪、二维正射建模、坡度仪、中海达RTK等测量方式,获取淤地坝指标的多组重复测量结果,用于计算均值作为约定真值,对相关指标的模型测量结果以绝对误差和相对误差进行评价。为消除人为主观因素影响,利用多种方式测量时,对同一指标解译或识别的起讫位置、路径、形状应保持一致。
如图7所示,淤地坝技术指标模型测量结果整体误差相对较小,各指标误差程度存在差异,最大误差为-3.48%。各指标模型测量误差较明显地呈现3个层次,淤积高程、坝顶长、输水涵管和坝顶宽处在第1层次,其误差程度相对最小,平均相对误差在1%以内。因模型构建相对简单,参数较少,且图像中特征参数提取相对容易,因此测量误差相对较小。
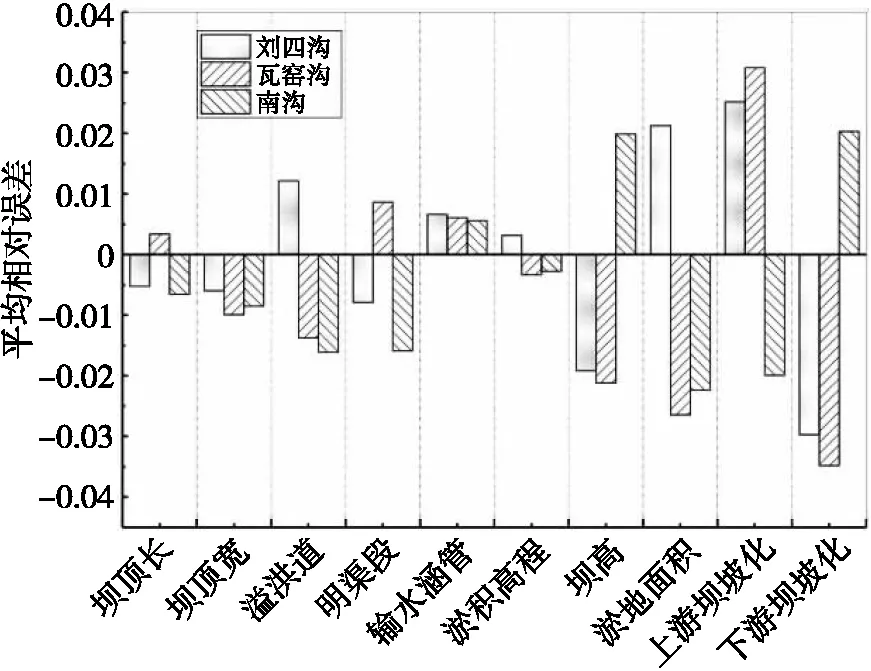
图7 淤地坝技术指标模型测量误差
溢洪道、明渠模型测量误差处在第2层次,误差程度相对较小,平均相对误差在2%以内。由于测量模型未能考虑溢洪道、明渠可能存在的坡率和曲率,其测量结果相对于其他长度类指标测量误差较大。
第3层次中坝高、淤地面积、上、下游坝坡比误差相对较大,但平均相对误差仍在3.5%以内。这几类技术指标的测量模型参数较多,存在误差累积的情况,且模型设计相对复杂,特征图像采集操作中容易出现偏差。
3 讨 论
黄土高原淤地坝数量十分庞大,其安全运行管理工作面临巨大压力[12-13],追踪淤地坝运行期技术指标的变化情况,掌握实时动态特征及其参数信息极其重要[14-15]。现阶段,淤地坝技术指标的高效、精确测量仍存在诸多困难。从业技术人员更偏向于不断更新的测量设备,利用三维激光扫描等先进技术取代传统的测距仪、全站仪等设备对目标进行测量,成本投入越来越大,但由于缺乏针对性的测量方法及技术,测量精度和效率仍无法满足应用要求。研究发现,鲜有学者关注淤地坝技术指标测量方法的研究,本文基于现实需要,依托视场角理论和RTK差分定位技术构建了该项工作的针对性测量方法。
针对淤地坝各技术指标特点,利用数学方法构建技术指标测量模型,通过正射淤地坝特征指标地物的方式,准确建立无人机视场与淤地坝之间的空间关系,以及特征图像的比例尺关系。同时,本文设计特征图像采集与筛选、特征目标解译与数据提取方案,利用比例尺及无人机成像高度等信息获取任意特征指标的像素占比及其实际长度和面积,实现模型参数信息的提取及运算,具有良好的理论基础和技术支撑。
研究表明,本文方法测量精度最大误差仅为-3.48%,完全满足淤地坝野外调查和运行管理等方面的需求,具备广阔的应用前景。但应注意的是,本文在测量模型构建中,未考虑淤地坝沟道坡降及部分指标的比降等因素,是造成测量误差的主要来源。
4 结 论
(1)本文测量方法精度较高,最大误差为-3.48%。不同类型指标测量精度存在差异,坝顶长、坝顶宽、输水涵管和淤积高程测量误差相对最小,平均误差在1%以下;溢洪道、明渠等指标平均误差2%以下;坝高、淤地面积及坝坡比等指标平均误差在3.5%以下。
(2)淤地坝指标测量模型构建的参数较少,其测量误差相对越小;测量模型设计越复杂,误差累积情况越明显,偏差越大;长度类指标的坡率和曲率是该类模型设计中误差的主要来源。
(3)本文方法工作效率显著,实现了淤地坝长度类、面积类、高程类、坡度类指标的高效测量,将繁杂的淤地坝指标测量工作简化为数学几何计算过程,解决了现场指标测量过程繁杂,实践难度较大的问题。
猜你喜欢
艺术家(2023年8期)2023-11-02
中国水土保持(2023年1期)2023-03-06
小哥白尼(军事科学)(2022年2期)2022-05-25
中国水土保持(2019年11期)2019-11-13
红领巾·萌芽(2019年8期)2019-08-27
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年18期)2016-10-11
股市动态分析(2016年4期)2016-09-29
CHIP新电脑(2016年3期)2016-03-10
