
基于Arduino 平台的核辐射侦测机器人电源管理与续航能力优化研究
2023-10-31 00:29张洋ZHANGYang
价值工程 2023年29期
张洋 ZHANG Yang
(南部战区疾病预防控制中心,广州 510630)
0 引言
随着核技术的发展,核辐射侦测已经成为现代社会的重要议题。为了确保核设施的安全运行和避免对环境及人类健康的潜在威胁,开展精确的核辐射侦测工作至关重要。随着技术的进步,机器人在核辐射侦测领域的应用逐渐受到重视,因其可以有效避免人员直接暴露在高剂量辐射环境下。但在实际应用中,如何确保机器人的持续工作时间、高效侦测和精确性仍是一个技术难题。
1 系统架构与电源需求
1.1 核辐射侦测机器人的组成部分与工作原理
核辐射侦测机器人是一个高度集成和自动化的系统,其核心组成部分包括:①辐射探测模块,通常采用盖革-弥勒(G-M)计数管,能够准确检测并转换辐射剂量;②机械手臂和移动机构,负责在污染场地进行导航、采样和其他互动任务;③数据通讯模块,用于实时发送探测数据和接收控制指令;④电源管理模块,确保各部件得到稳定的电源供应,同时优化续航能力。
其工作原理如下:当机器人进入指定区域时,G-M 计数管开始监测辐射强度,一旦检测到超过预设阈值的辐射,机器人将采取相应的响应措施,如标记位置、采集样本或发送警报,同时,所有检测数据都会实时通过数据通讯模块传输至远程控制中心,使操作者能够迅速了解现场状况并做出决策。
1.2 Arduino 与各功能模块的数据通信需求
Arduino,作为核辐射侦测机器人的中央控制单元,在数据通信方面扮演着至关重要的角色。首先,它必须与辐射探测模块进行无间断的数据交互,实时获取辐射强度信息。其次,为了确保机械手臂的精确操作和机器人的灵活移动,Arduino 需要接收来自各种传感器(如位置、角度和速度传感器)的反馈信息,同时发送控制命令以调整机械手臂的动作和机器人的行进方向。此外,考虑到机器人可能在远离操作者的区域工作,Arduino 需要与无线通信模块进行数据通信,将探测结果、系统状态和警报信息实时传输至远程控制中心,同时接收并执行从控制中心发送的指令[1]。为满足这些复杂的数据通信需求,Arduino 不仅要具备多个高速、高可靠性的串口和通信接口,还需在软件层面进行精细的调度和优化,以确保数据的实时性、准确性和稳定性。
1.3 系统整体供电需求
在核辐射侦测机器人的设计中,系统整体供电需求是一个至关重要的考虑因子,因为它不仅影响到机器人的持续工作时间,还关系到各功能模块的正常运行和数据处理速度。
主控制单元Arduino,作为整个系统的心脏,需要稳定且持续地电源来保证其无间断运行。考虑到其与各功能模块的频繁数据交互,供电稳定性对于保障数据准确传输和处理至关重要。
辐射探测模块、机械手臂、传感器等核心功能部件都有各自的电源需求。例如,辐射探测模块在高剂量环境下可能需要更高的采样率,从而增加能耗;机械手臂在执行复杂操作时,尤其是在采集样本或应对突发情况时,可能会有瞬时的大电流需求。通讯模块,尤其是无线传输部分,根据通讯距离和数据传输速率,也会产生不同的电源需求。在长距离或高速传输中,其电源消耗会相对增加。考虑到机器人可能需要在恶劣、无人的环境中长时间工作,电池的容量和续航时间成为关键。不仅要选择能够满足高能耗需求的电池,还需考虑电池的重量、体积和安全性,确保它不会因为过热或其他原因影响机器人的正常运行。
2 辐射剂量检测模块与其校准
2.1 G-M 计数管的工作原理
G-M 计数管,即盖革-穆勒计数管,是一种用于检测和测量电离辐射的装置。其工作原理如图1 所示:当放射性粒子通过管中充满的气体时,这些粒子会电离周围的气体分子。G-M 计数管内部包含一个阳极和一个阴极,中间填充有低压惰性气体。当电离辐射进入该管并击中气体分子时,它会导致电子从气体分子中剥离,形成阳离子和自由电子。由于管内有高电压,这些自由电子将被迅速吸引到阳极,而阳离子则移向阴极。这种移动产生了一个可测量的电脉冲,该脉冲与经过计数管的辐射量成正比。然后,这些电脉冲可以由外部电子设备计数并转化为辐射水平的可读输出。为了防止连续的放射性粒子引起连续的放电(即气体持续电离),G-M 计数管使用特定的惰性气体和添加物,这使得每一个电离事件后,管内迅速恢复到初始状态,准备检测下一个粒子。

图1 G-M 计数管的工作原理
2.2 校准方法及其重要性
在辐射领域,校准通常涉及使用已知活度和能量的放射源对仪器进行标定。G-M 计数管的校准方法主要包括以下几个步骤:第一步,选择标准源。使用具有已知放射活度和特定能量的放射性标准源。第二步,测量背景辐射。在没有标准源的情况下,先测量并记录背景辐射。第三步,暴露于标准源。将G-M 计数管暴露于标准源下,并测量其计数。第四步,数据分析。从测量值中减去背景辐射,得到实际的计数。然后,与标准源的已知活度进行比较,以确定计数管的效率。第五步,确定校正因子。根据测量结果和标准源的活度确定一个校正因子。此后,该因子将用于修正实际测量值,使其更加准确。
校准在辐射测量领域扮演着至关重要的角色,尤其当涉及G-M 计数管这种设备时。首先,它是确保测量准确性的关键步骤,只有经过校准的设备,其测量值才能真实地反映实际的辐射水平。此外,为了满足多数国家和组织的法规要求,定期进行辐射检测设备的校准不仅是必要的,而且也是确保其准确性和可靠性的手段[2]。对于在辐射环境下工作的专业人员来说,知道其使用的设备已经经过正确的校准,可以增强他们的工作信心。更为重要的是,校准过程本身可能揭示设备的潜在缺陷或故障,这为提前识别并防止可能导致错误测量的问题提供了保障。
2.3 校正因子的确定方法
校正因子的确定是为了修正G-M 计数管的实际测量值与标准值之间的偏差,确保其测量结果的准确性。通常,这一过程首先涉及使用已知放射性活度的标准放射源对G-M 计数管进行照射,然后记录计数管的响应。随后,将这一响应与标准放射源的已知活度进行比较,从而得出实际测量值与应有测量值之间的差异。这个差异就是所需的校正因子。最后,实际操作时,使用该校正因子对G-M 计数管的测量结果进行调整,从而得到更接近真实放射性活度的测量值。
3 机械手臂的同步控制与采样
3.1 机械手臂与操作人员手臂的同步控制原理
在核辐射侦测机器人系统中,实时的手臂同步控制是核心功能之一,其旨在实现远距离操作人员能够直观、精确地控制机械手臂,模拟人类手臂的复杂动作,进而实现高效、安全的现场采样。该同步控制的核心原理基于操作人员手上佩戴的手臂模型上安装的加速度传感器。这些传感器可以实时感知手臂及手指在三个方向(x、y 和z 轴)上的移动加速度。
一旦手臂模型的位置或姿态发生变化,加速度传感器便会捕获这些变化,并通过算法将加速度数据转化为对应的角度值,这个角度值可以反映出操作人员手臂的实际倾斜角度。这些角度数据接着通过Arduino 主板的无线传输模块传递给机械手臂上的控制单元。在接收到这些数据后,机械手臂会通过预先编程的控制策略,驱动各个关节的舵机,使其旋转到与操作人员手臂对应的角度,从而实现两者的同步运动。
3.2 现场采样的具体步骤与技术难点
现场采样,作为核辐射侦测机器人的核心功能,涉及操作人员通过远程的手臂模型来同步驱动机器人的机械手臂,确保准确无误地获取疑似有毒或有害的样本。初步的操作包括机器人接近目标区域并利用实时视频监控为操作人员提供清晰、低延迟的场景画面。随后,手臂进行精确定位并执行物质取样,最终将样本安全地存放于专用容器中。这一过程面临众多技术难点,如需保证机械手臂与操作手臂的高度同步性、视频的高清晰度、针对不同样本的采样工具多样性,以及样本的安全处理[3]。此外,外部环境如风速、湿度等可能带来的干扰也要被充分考虑和应对,确保整个采样过程的安全性与准确性。
3.3 采样过程中的数据通信与电源管理
在机器人的采样过程中,数据通信和电源管理是两大关键技术要点,确保了机器人的高效、持续且准确运作。
从数据通信角度看,如图2 所示采样过程中需要实时将机器人收集的信息,如视频流、传感器数据(温度、湿度、辐射剂量率等)无缝地传送至操作员的遥控终端。使用高带宽、低延迟的无线通信协议能确保数据的实时传输,并支持高清视频流的无滞后播放。此外,为了增强通信的稳定性,在机器人与控制端之间建立多通道传输和自动切换系统,确保在一个通道受到干扰或信号弱时,能自动切换至另一个更加稳定的通道。

图2 数据通信过程
电源管理方面,由于机器人在采样过程中要进行大量的数据处理和传输,因此会消耗大量电能。要确保机器人在整个任务期间持续工作,必须进行精细的电源管理。这包括:对每个功能模块进行独立的电源调配,确保在非工作状态下降低功耗;实施动态电源调度策略,根据任务需求合理分配电源;以及引入节能算法,如在机器人静止或等待指令时进入低功耗模式[4]。此外,考虑到采样过程中可能的长时间任务,可以搭载更大容量或高效的电池,并考虑太阳能等替代能源作为备份或辅助电源。
4 系统的实际应用与有效性检验
4.1 使用放射源进行的实际测试场景
在某废弃的核能研究设施中,核辐射侦测机器人进行了一次关键的实际应用测试。这个设施曾经是进行核燃料研究的前沿实验室,但由于某些原因被废弃了,其中残留了多种放射性物质。由于这个设施的复杂性,传统的手持辐射检测方法难以全面覆盖整个场地。因此,这次测试的主要目的是评估机器人在复杂环境中的性能和准确性。在测试中,机器人被部署进入设施的中心区域,这里预计含有最高的辐射强度。它开始自动地按照预设的路径,穿越实验室、长走廊和多个密闭的研究室。利用其高灵敏度的G-M 计数管,机器人持续地扫描其周围环境,并实时传输数据。
4.2 各功能模块的实际表现与问题发现
在核辐射侦测机器人的实际应用过程中,对于其各功能模块的表现和潜在问题进行了深入地观察和分析。首先,辐射剂量检测模块使用G-M 计数管在高强度放射区域展示了出色的准确性,但在低辐射场景中,电磁干扰导致了短暂的误报。而视频监测模块为操作员提供了清晰、实时的图像,优化了机器人的导航功能,但在特定的光照条件下,图像质量存在局限性。此外,无线传输模块在大多数场景中实现了稳定的数据传输,但在深层地下或特定的遮挡区域,出现了短暂的通信中断,这可能要求对传输技术或硬件进行优化以适应更多的环境条件。与此同时,温度和湿度测量模块为核辐射侦测机器人提供了可靠的环境感知,但在高湿度环境下,湿度传感器的反应速度有所降低,这暗示传感器可能需要进一步的校准或技术改进。机械手臂模块的表现则相对突出,与操作员的同步性达到了较高水平,但在执行某些复杂动作时,出现了轻微的滞后,这指出了对于同步算法或硬件响应速度的潜在优化空间。红外测距模块在绝大多数情况下为机器人提供了准确的距离信息,但面对透明或高反光表面时偶尔失准,这也许意味着需要对传感器进行更高级的校准或引入其他类型的测距技术。
4.3 实验结果与数据分析
从表1 所示的数据中,可以观察到随着时间的推移,剂量率逐渐增加,这可能表明机器人逐渐靠近放射源。此外,可以注意到,尽管放射强度增加,但温度变化较小,仅增加了0.7℃,而湿度的增加也不明显。这表明机器人的环境传感器可以有效地分离和测量各种参数,而不会受到其他变量的影响。
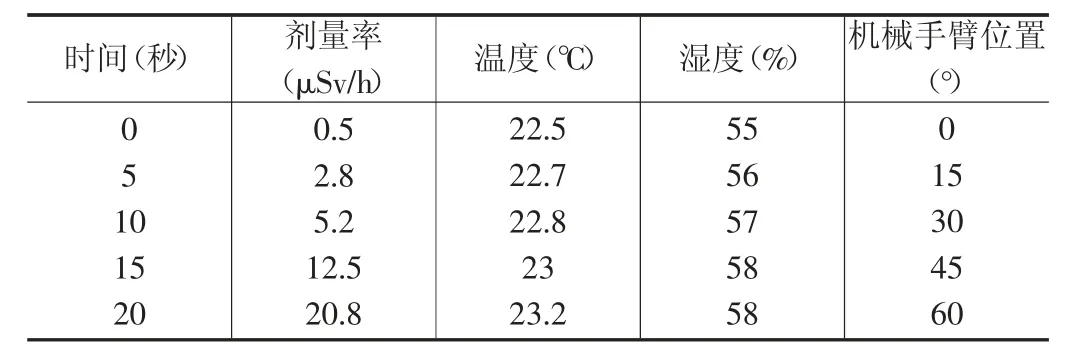
表1 实验结果数据
此外,机械手臂的位置数据显示,随着时间的推移,机械手臂逐渐从初始位置转动到60°。这可能是由操作人员引导机械手臂接近放射源进行采样所导致的。其连续的变化也表示数据传输和同步控制机制工作得很好,确保了机械手臂的平稳运动。
5 结语
随着核技术的应用与核辐射事故的潜在风险,核辐射侦测技术在安全监测、环境评估和事故应对中的重要性日益凸显。基于Arduino 的核辐射侦测机器人不仅技术上实现了创新,更在实际应用中展现了其巨大的潜力和价值。对于未来的研究,除了进一步优化机器人的性能,还应考虑如何使其在更广泛、更复杂的环境中发挥作用,以满足日益严峻的核安全挑战。
猜你喜欢
上海计量测试(2022年5期)2022-02-16
今日农业(2020年14期)2020-12-14
中国生殖健康(2020年6期)2020-02-01
科技风(2019年20期)2019-10-21
中国生殖健康(2018年6期)2018-11-06
中国医科大学学报(2018年3期)2018-03-20
灾害医学与救援(电子版)(2017年3期)2017-02-06
金色少年(奇趣科普)(2016年8期)2016-09-21
我爱学(创意美术与手工)(2016年4期)2016-07-14
湖南有色金属(2016年2期)2016-06-05
