基于高速稀土永磁无刷直流电机的分段控制方法研究
2023-10-29 10:22许亚星李庆楠王晓航
山西电子技术 2023年5期
许亚星,任 磊,李庆楠,王晓航
(中国航空计算技术研究所,陕西 西安 710065)
0 引言
随着科技的日益发展,高速稀土永磁无刷直流电机得到越来越广泛的应用,对高转速情况下的速度伺服控制也提出了越来越高的要求。传统伺服控制方法不能同时兼顾速度调节的快速性和高精度,针对高转速情况下更好的速度伺服控制方法有待进一步研究。
1 系统建模
稀土永磁无刷直流电机速度伺服控制一般采用PID控制,其中P参数为比例参数,其与比较误差直接相乘,对误差进行放大,比列系数越大,对误差的放大能力越大,反之亦然;I参数为积分参数,其对误差在时间上进行积分,当有偏差输入时,则对偏差进行积分,只有当偏差消失时,积分作用才不起作用;D参数为微分参数,其主要是克服被控对象的滞后,当偏差变化的速度越大,微分的时间越长时,微分作用的输出变化越大。PID控制的原理和控制规律如图1所示。
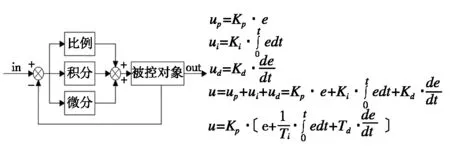
图1 PID控制原理和控制规律
本文采用两态分段调节法进行控制,即将调节过程分段为动态和稳态两个过程,在两个过程分别采用不同的控制方法进行调节。在动态过程中注重调节的快速性,采用单纯的P控制;在稳态过程中注重减小超调量和稳态误差,采用ID控制。
2 仿真结果
通过模型对传统PID控制和分段PID控制的速度伺服控制进行仿真,仿真结果如图2所示。
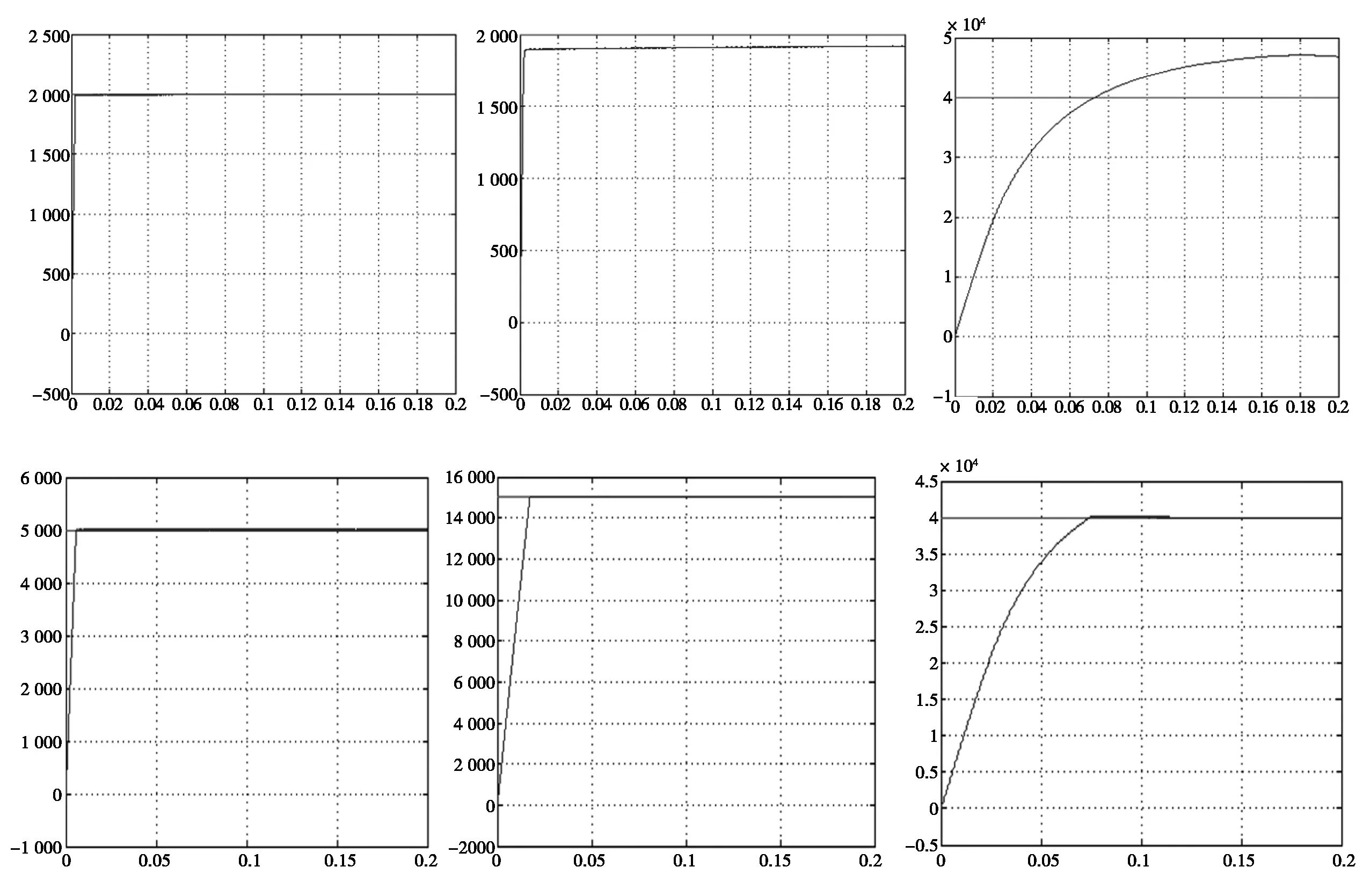
图2 传统PID控制和分段PID控制的控制效果
3 结果分析
由仿真结果可以看出,采用单纯的PI控制时,只能对特定的给定速度起到很好地调节效果,当给定速度变动时,之前的PI参数就会不再最佳。比如当给定转速为高转速时,大的比例参数和小的积分参数比较适用,但当给定转速为低转速时,大的比例参数会出现超调,小的积分参数会因为积分误差小而调节作用变弱,造成大的稳态误差。采用两态分段调节后,在动态过程只采用P控制,最大限度地增大了动态性,在稳态阶段只采用ID控制,最大限度地减小了超调量和稳态误差。而且积分环节的作用只在稳态阶段起作用,即其进行积分的误差始终在1 000 r/min以内,而与给定的输入没有关系,这样可以保证对于不同的给定输入,同一套控制参数始终有效。
4 结论
与传统PID控制方法相比,采用两态分段调节法在高转速和低转速下均能够很好地控制转速,不仅具有良好的动态性和稳态精度,还能满足宽范围的不同给定转速的调速要求。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
上海大中型电机(2021年2期)2021-07-21
煤气与热力(2021年4期)2021-06-09
防爆电机(2020年6期)2020-12-14
中华戏曲(2020年1期)2020-02-12
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01