低速智能巡逻机器人方案设计
2023-10-29 10:22郭盛杰
山西电子技术 2023年5期
郭盛杰
(山西大众电子信息产业集团有限公司,山西 太原 030024)
0 引言
近年来,随着人工智能与机器人技术的快速发展,机器人也逐渐应用到我们日常生活的各个领域之中。当前社会公共安全复杂多变,公安警力面临严重不足,为推动巡逻业务的快速升级,降低公安干警的劳动强度和执勤风险[1],智能低速巡逻机器人可有效解决这个问题。该系统立足于实际需求,功能实用,可靠性高,具有广阔的市场前景。
1 系统整体设计
该系统主要由底盘线控系统、环境感知系统、定位导航系统、供电系统、通信系统及路径规划系统组成。系统设计组成框图如图1所示。
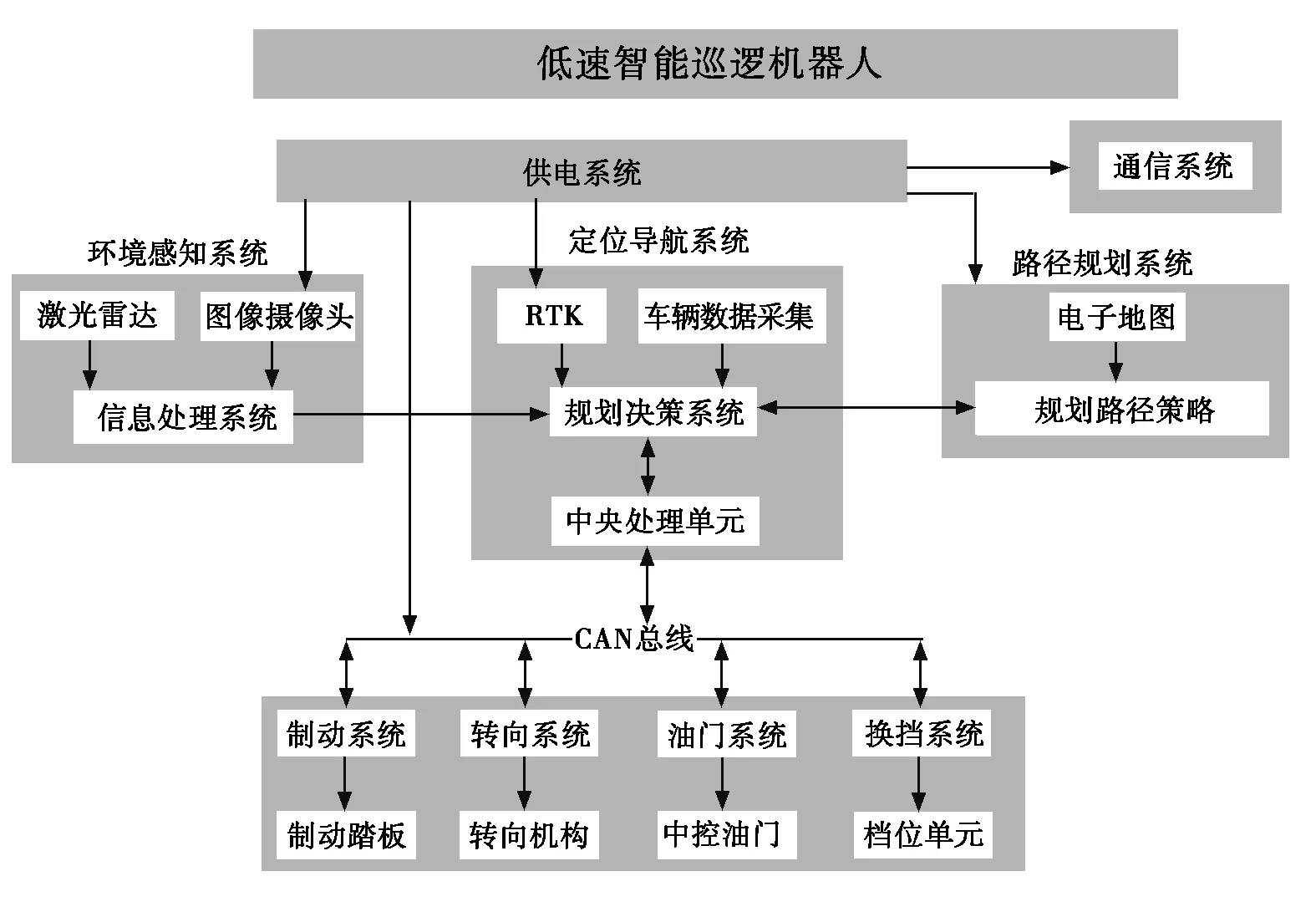
图1 系统组成框图
该机器人具备自主巡逻、自动避障、位置信息上报、图像识别、视频监控、一键报警等功能。
2 工作原理
智能低速巡逻机器人控制系统以GD32F407ZGT6为线控核心,感知系统负责采集信息,经决策系统分析后自动生成循迹路线,完成规定路线巡逻。机器人通过人脸抓拍、车牌识别技术采集人脸图像与车牌信息,由通信链路传至控制平台,并与重点管控人员人像库进行比对核验,若比对成功则触发闭环报警处置机制,将报警信息推送至一线。监控模块:高清摄像机用于机器人实时视频呈现、视频录像及人像抓拍。推荐搭载云台实现360°旋转,可选高低伸缩设计调节摄像机高度,实现更大范围监控;全向相机一般由多个摄像机四向布置构成,用于全向视频的采集及记录。
3 系统硬件设计
3.1 控制系统模块
控制系统模块以GD32F407ZGT6为主控制芯片,采用UART、SPI、I2C、CAN2.0为主要通信接口;采用基板+核心板的控制模式。核心板通过指令下发经接口电路控制底盘方向、制动功能、油门、换挡、执行机构锁定等功能操作,从而达到对车辆的控制。基板以CAN总线收发器SM1050、RS232收发器SM232、光电隔离器TLP521为主的接口芯片构成,负责与核心板、车辆执行机构进行通信交互处理,达到了承上启下的连接作用。四路I/O口利用光电耦合器抗干扰能力强的特点实现输入端和输出端的电气隔离,对锁定机构进行控制和接收方向、制动的反馈值。其中RS232串口的接口芯片选用集成电路SP3232EN,GD32F407的PB6管脚为PWM输出,通过改变PWM的占空比改变控制电机的转速,达到对车辆油门的控制功能。
3.2 动力系统
智能低速巡逻机器人中动力电源决定着其工作时间,提供稳定的动力,将会降低工作时各控制器的出错率,稳定工作特性。底盘动力供电采用容量为48V 300AH磷酸铁锂电池,输出工作电压在48V,可快速充放电,输出功率大,寿命长。
3.3 硬件电路设计
硬件电路主要由微处理器单元、通信模块单元、显示模块单元、记忆存储芯片、语音播报模块、传感器采集单元等构成。核心板控制电路设计如下图2所示。
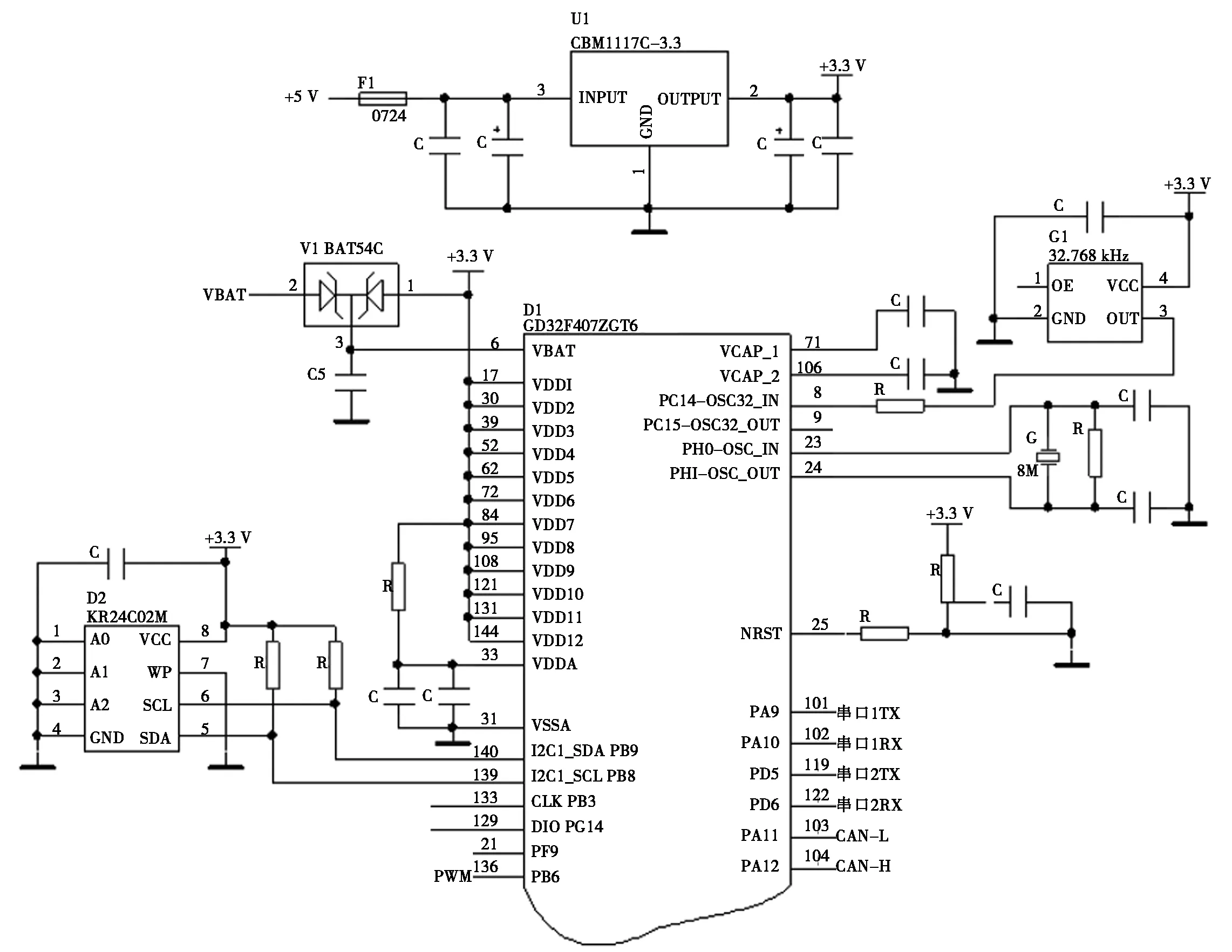
图2 硬件电路设计图
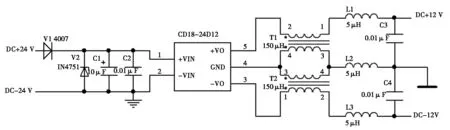
图3 DC/DC模块设计图
3.4 电源模块设计
电源模块设计分两个转换单元,第一转换单元是将动力电源DC48V转换为稳定DC24V直流电压,后经第二DC/DC转换电路转至DC12V,为上装设备提供稳定的电源输入,确保上装设备的正常工作。具有过压保护、输出过流保护、过热保护等电路组成,其主要电路如下图所示。
4 软件设计
4.1 路径规划系统软件设计
智能低速巡逻机器人通过软件设计来实现机器人在作业中如何正确行驶[2],其运动方式主要为匀速行驶、停车、转向运动。基于高精度地图的车道级动态路径规划及辅助感知成果最终都将作为参考信息提供给决策单元,决策单元在已知路线和动态目标的基础上通过算法生成车道级控制指令输出至底盘线控系统。车辆启动后在预设轨道上进行匀速行驶,作业时车辆停止,完成后车辆启动继续匀速运动。图4所示为路径系统规划软件流程图。
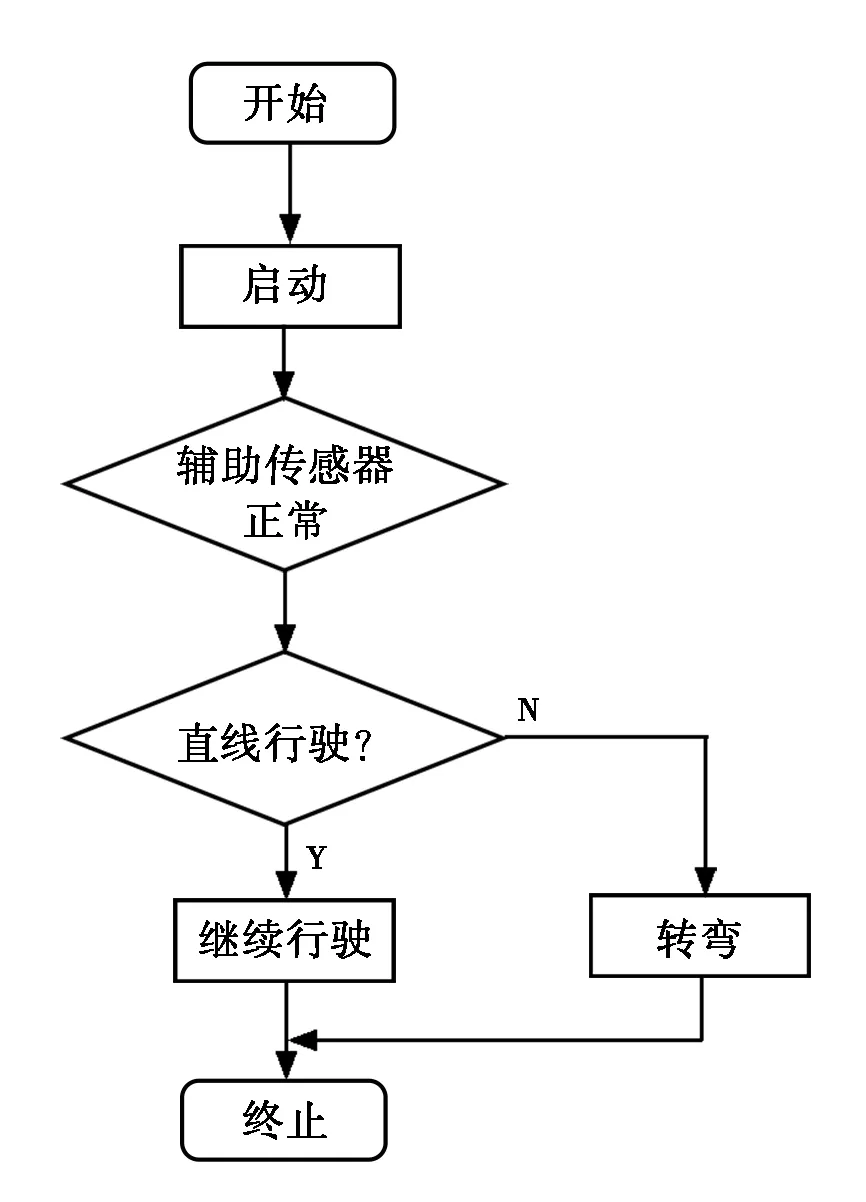
图4 路径规划系统软件流程图
4.2 避障系统软件设计
智能低速巡逻机器人避免障碍系统主要环境感知单元中激光雷达、车载毫米波雷达感知地面信息,传达给中央控制单元,保证系统工作正常,行驶的稳定和可靠。图5所示为避障系统流程原理框图。
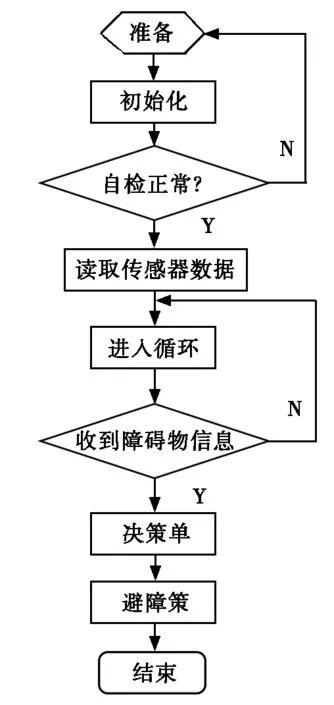
图5 避障系统原理框图
5 结束语
本文介绍了智能低速巡逻机器人系统的整体概述,并介绍了硬件设计方案及软件设计方案,硬件通过中央控制系统经底盘线控系统控制驱动机器人进行巡逻作业,降低公安干警的劳动强度和执勤风险,推动了巡逻业务的快速升级。而软件方案是规划机器人行走路径及避免障碍物,保证了机器人在作业过程当中的正常行进,避免设备受损,提高了机器人的可靠性和寿命。随着智能化设备和自动控制技术的不断提高,智能机器人正在不断的开发升级,未来具有更广泛的应用场景,本设计达到了预期效果。
猜你喜欢
汽车纵横(2022年10期)2022-10-28
汽车纵横(2022年9期)2022-09-15
汽车纵横(2022年9期)2022-09-15
初中生学习指导·中考版(2022年4期)2022-05-12
汽车维修技师(2019年7期)2020-01-16
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
汽车维修技师(2018年11期)2018-05-11