
基于激光雷达的北京海淀区大气污染监测及预警
2023-10-27 11:03高静
现代信息科技 2023年17期

摘 要:对PM2.5浓度进行监测及管控,对提高北京空气质量具有重要意义。文章首先分析了北京市的空气质量现状,得出PM2.5为北京市的首要污染物。采用车载式大气颗粒物激光雷达对北京市海淀区进行走航探测,结合GPS定位,协同粒子后向轨迹追踪图,实时掌握区域关键路径大气污染区传输情况和污染来源。最后将100米以内的激光雷达数据与北京国控点平均数据进行对比,结果显示二者具有较好的一致性。
关键词:大气颗粒物激光雷达;PM2.5;移动走航监测;GPS定位
中图分类号:TP39;X831;X87 文献标识码:A 文章编号:2096-4706(2023)17-0122-05
Monitoring and Early Warning of Air Pollution in Haidian District of Beijing Based on Lidar
GAO Jing
(School of Physics and Electronic Information, Dezhou University, Dezhou 253023, China)
Abstract: Monitoring and controlling the concentration of PM2.5 is of great significance for improving the air quality in Beijing. This paper first analyzes the current air quality situation in Beijing and concludes that PM2.5 is the primary pollutant in Beijing. Using a vehicular atmospheric particle lidar for navigation detection in Haidian District of Beijing, combined with GPS positioning and particle backward trajectory tracking map, real-time grasp of the transmission situation and pollution sources of the key path atmospheric pollution area in the region. Finally, a comparison is made between the Lidar data within 100 and the average data of Beijing's national control points, and the results show good consistency between the two.
Keywords: atmospheric particle lidar; PM2.5; mobile navigation monitoring; GPS positioning
0 引 言
北京位于东经115.7°—117.4°,北纬39.4°—41.6°,总面积为16 410.54平方千米。位于华北平原北部,背靠燕山,毗邻天津市和河北省。北京的气候为典型的北温带半湿润大陆性季风气候。北京辖16个区,共147个街道、38个乡和144个镇。为推进经济结构调整,以汽车制造为代表的现代制造业异军突起,高新技术产业稳步回升,工业成为拉动经济增长的重要力量,对经济增长的贡献率达到33.2%。第三产业平稳增长。在全市经济始终保持了快速、健康的发展态势的同时,环境也面临着很大的污染。
1 北京市空气质量现状
北京大气污染来源复杂,主要以大家比较敏感的PM2.5来看,汽车尾气排放约占45%,火电厂排放约占12%(主要是煤燃烧粉尘和湿法脱硫产生的石膏雨),冶金化工跟建材企业产生30%(北京周边如廊坊很多高能耗的企业),其余的来源例如建筑工地等,甚至烧烤摊都能产生大量细微颗粒物[1]。这些来源复杂的污染物,囿于北京地理环境,在秋冬季节很容易积累形成雾霾。
图1为北京市2016年一年的环境空气质量等级占比图。从图中可以看出一年内的污染天气达到了近200天,其中,重度污染占比为10%,图2为主要的六项污染物污染贡献率。可直观看出列出的这六项污染物中PM2.5和PM10所占比重都很大,其中PM2.5的占比为36.8%,PM10所占比重为25.4%。
图3为2016年北京一年四季的首要污染物占比图。其中PM2.5在首要污染物中占比最大的季节分别为春季,秋季,冬季。夏季的首要污染物为臭氧,但PM2.5占比也排在第二位。综上分析,PM2.5和PM10颗粒物为北京市的主导首要污染物[2]。为了提高北京市空气质量达标天数,首要解决颗粒物的问题,因此对颗粒物浓度的监测以及相关管控迫在眉睫[3]。
2 车载激光雷达简介
2.1 车载激光雷达结构简介
大气环境车载激光雷达监测系统由感知层、平台层和应用层三个部分组成,系统全程贯穿数据质量控制[4]。感知层由车载激光雷达监测系统和地面网格化监测系统组成。车载激光雷达可以实时监测较大范围的大气污染分布,同时具有较高的时间和空间分辨率。车载激光雷达监测系统包含定点垂直测量,扫描监测和走航监测三种监测方式[5,6]。水平扫描用于对城市周边重点区域进行实时监测,准确排查污染来源,并评估其对环境空气质量的影响。垂直探测用于实时掌握区域大气污染物垂直分布状态,对污染事件提前预警。走航监测用于实时掌握区域关键路径大气污染区传输情况,说清传输污染来源及其贡献率。监测内容根据地区大气污染特点结合颗粒物激光雷达、臭氧激光雷达、测风激光雷达以及温湿度激光雷达等。地面网格化系统由高精度、易部署的微型站与国标方法的扬尘站、小型空气自动站等组合布点,构成监测网络全覆盖的感知体系。平台层通过无线传输方式接收監测数据,进行数据的存储和处理,并对监测数据进行监控,甄别异常数据。应用层利用大数据技术挖掘数据之间的关系,结合气象数据、地理信息数据、环境质量模型,可实现实时监控、污染源解析、空气质量预报预警等应用,为环境管理部门有效监管及科学决策提供数据支撑。本文采用RayAL-MScan型车载颗粒物激光雷达,如图4所示。
2.2 车载激光雷达原理
大气探测激光雷达是集“光机电理”为一体的主动光学廓线定量遥感工具。依据米散射原理构建的米散射激光雷达系统是研究最早也是最成熟的激光雷达系统,由激光发射系统、接收光学系统和数据处理系统三部分组成[7]。其主要用于大气中气溶胶特性研究,涉及气溶胶后向散射系数、消光系数、粒子谱分布等重要参数。用泵态激光器作为发射光源,其工作波长为532 nm,单脉冲输出能量≥1 MJ,脉冲频率为2 kHz。接收系统采用望远镜和各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等组合。其中望远镜的直径为180 mm。粒子监测仪的测量范围为0~100 mg/m3,精度低于±10%。
从大气探测激光雷达系统接收的后向散射回波信号中获取气溶胶消光系数的方法主要有:斜率法,Klett法和Fernald法等[8-10]。本节主要介绍常用的Klett算法和Fernald算法的具体算法。
2.2.1 Klett方法
Klett法主要适用于在非均匀大气中气溶胶浓度较大的情况下获取后向散射系数。非均匀大气中的空气分子的后向散射和气溶胶的后向散射不在同一数量级。在Klett反演算法中,假设大气消光系数α和后向散射系数β之间满足指数关系,即β = Cαk,求解得到大气消光系数如式(1)所示。
式中,S(z) = ln (P(z) z2),zc为参考距离,一般选探测区域的最远距离。α (zc)为消光系数参考值。Klett方法适用于大气边界层、云层或者光学厚度较大的气溶胶层等大气气溶胶浓度较高的区域。Klett法可以在非均匀大气中计算出具有距离分辨率的消光系数,且采用由远及近的积分形式时,反演误差逐渐收敛,缺点是未区分分子瑞利散射和气溶胶米散射效应,只能给出总消光系数。Klett法反演结果的主要误差来自假设或估计的边界值zc。
2.2.2 Fernald方法
在Fernald反演方法中将大气看作两部分:大气分子与气溶胶。β(z)表示为大气分子后向散射系数和气溶胶粒子的后向散射系数之和,α(z)表示为大气分子消光系数和气溶胶消光系数之和。Fernald法主要适用于在自由对流层等大气气溶胶含量较少的区域获取后向散射系数。Fernald假设后向散射系数和消光系数之间是线性关系。通过Fernald法得到气溶胶后向散射系数:
式中,S1为气溶胶的后向散射比,又称为激光雷达比,S2为空气分子的消光后向散射比,X(z) = ln(P(z) z2)。要从回波信号P(z)中获得气溶胶消光系数αa(z),需要确定zc、S1、S2、αm(z),αa(zc)等参数的值。对于532 nm波长,S1值为常数50,S2值为常数8π / 3。参考高度zc一般选取不含大气气溶胶的清洁大气层所在的高度。大气中分子的尺度谱和密度等分布相对比较稳定,因此,分子的消光系数可根据美国标准大气分子模式较为精确地确定。
3 监测结果
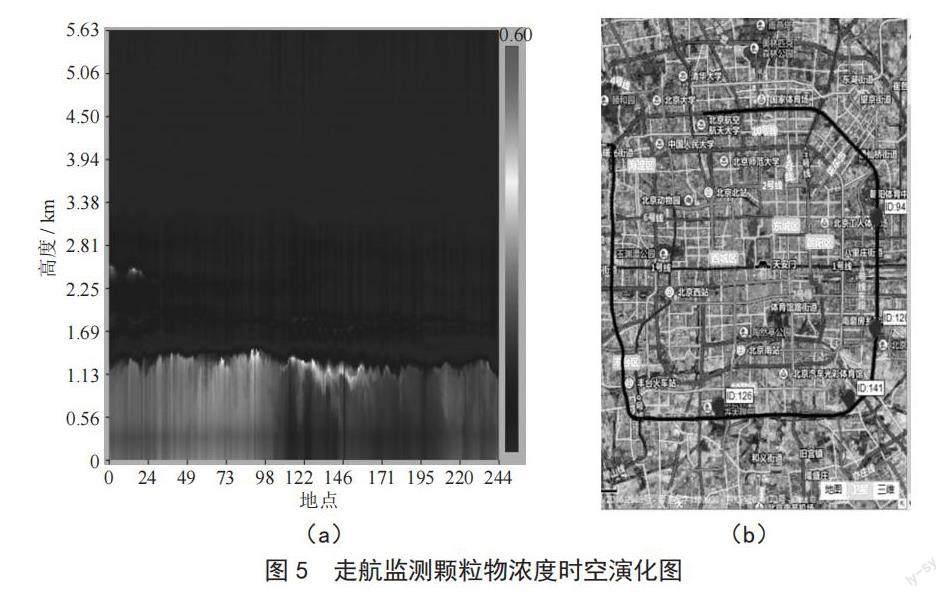
大气边界层(Atmospheric Boundary Layer, ABL):离地面约几百米到1千米以下的大气层,这层大气受地表面热力和动力影响很大,不能忽略。对于颗粒物和污染物来说,边界层高度决定了污染物扩散垂直空间范围。图5为2017年10月15日走航监测颗粒物浓度时空演化图。颜色深浅代表污染程度,红色为污染程度比较重,其次黄色,以此类推蓝色为污染比较轻或无污染(如颜色条自上而下所示)。走航探测的最大高度为11.25 km,从走航颗粒物浓度演化图可以看出污染物主要在1 500 m高度的范围内。走航轨迹以北京航空航天大学(北四环)为走航起点,围绕北四环,途径东四环、南四环、西四环回到北四环。
图6为2017年10月17日的走航颗粒物立体展示图,由图中可知由北四环至东四环和京哈高速交口附近路段颗粒物浓度较大(对应走航采集点为0~98),从京哈高速至莲石公路路段期间,走航探测到的颗粒物污染减小(对应走航采集点为98~205),从莲石公路至终点颗粒物浓度再次升高,但颗粒物浓度较起始走航位置低(对应走航采集点为205~244)。在北四环与东四环走航时颗粒物浓度最大,并且在北四环和东四环走航时颗粒物浓度比在南四环和东四环大,走航时为东北风,上风口比下风口颗粒物浓度较大,在100 m处主要污染物来源是地面的扩散,并且在100 m及1 000 m污染物主要是高空扩散,而高空扩散污染物主要是来自外界污染的传输,主要是南四环来自北四环方向的污染物。
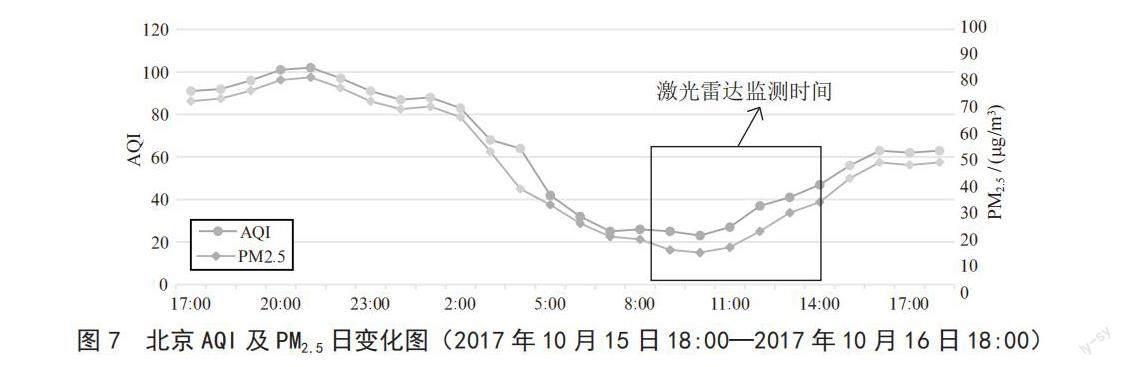
图7为北京2017年10月15日18:00—2017年10月16日18:00的AQI及PM2.5日变化图。从图中可以看出空气质量指数和PM2.5浓度的变化趋势基本一致,均随时间的变化呈现先逐渐变好,又逐渐变差的过程。选择9:00—14:30作为激光雷达监测时间,如图7中框线所示。PM2.5激光雷达时空演化图如图8(a)所示。PM2.5浓度整体较小,空气质量优,在高度2 km处监测到一个PM2.5输入源,并在13时左右发生沉降,导致近地面PM2.5浓度上升。图8(b)表为激光雷达数据(0~100 m)和北京国控点平均数据对比图。经过对比发现激光雷达测量PM2.5数据和国控点数据基本一致,但在监测时间段内数据较小,空气质量优,整体呈现变差的趋势。
4 结 论
通过车载激光雷达对北京北四环附近的走航探测结果进行分析,得到北四环与东四环交口附近颗粒物浓度较大,南四环与西四环交叉口颗粒物浓度相对较小。走航监测可以直观地反映城市各个区域的污染情况,消光系数的数值大小可以反映城市颗粒物浓度的变化趋势。结合北京市气象条件,可以推测各个区域污染的来源。从走航监测结果来看,空间颗粒物浓度有很大的变化,无论在水平尺度还是在垂直尺度,都有很明显的变化。边界层高度决定了污染物扩散垂直空间范围,是十分重要的污染物空间容量变化指标。监测显示北京边界层高度时间变化特征在正常范围内。
参考文献:
[1] 藉雪峰.北京市PM2.5质量浓度与气象因子的关系 [J].内蒙古煤炭经济,2018(8):18-19.
[2] 龙小菊.北京市区冬季PM2.5污染特征及来源分析 [J].中国环境管理干部学院学报,2017,27(2):64-67.
[3] 于博,程念亮,李红霞,等.北京市PM2.5组分SO42-浓度的时空分布及来源分析 [J].环境工程,2016,34(7):102-109.
[4] 宋鹤宁,刁淑然.车载激光雷达移动测绘系统在高精度地图采集中的应用 [J].北京测绘,2022,36(8):1074-1078.
[5] 苏靖棋.车载激光雷达测量系统 [J].现代城市轨道交通,2020(1):110-113.
[6] 柴文轩,唐桂刚,王帅,等.京津冀地区一次浮尘过程的车载激光雷达走航观测 [J].中国环境监测,2019,35(3):138-145.
[7] 田晓敏,刘东,徐继伟,等.大气探测激光雷达技术综述 [J].大气与环境光学学报,2018,13(5):321-341.
[8] FERNALD F G. Analysis of atmospheric lidar observations: some comments [J].Applied Optics,1984,23(5):652-653.
[9] KLETT J D. Extinction boundary value algorithms for lidar inversion [J].Applied Optics,1986,25(15):2462-2464.
[10] COLLIS R T H,FERNALD F G,LIGDA M G H. Laser radar echoes from a stratified clear atmosphere [J].Nature,1964,203(4951):1274-1275.
作者簡介:高静(1996—),女,汉族,山东潍坊人,助教,硕士,研究方向:激光雷达大气环境监测。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
家庭医学(下半月)(2020年7期)2020-08-24
铁道通信信号(2020年8期)2020-02-06
中国交通信息化(2019年1期)2019-03-26
四川环境(2019年6期)2019-03-04
电子制作(2018年16期)2018-09-26
中国公共安全(2017年11期)2017-02-06
高原山地气象研究(2016年2期)2016-11-10
电源技术(2015年2期)2015-08-22
