面向状态空间的永磁同步电动机控制器设计
2023-10-26 05:23:22田里思李佳伟刘立伟宋建雄
实验室研究与探索 2023年7期
田里思, 李佳伟, 刘立伟, 朱 硕, 宋建雄
(中国矿业大学电气工程学院,江苏 徐州 221116)
0 引言
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)是一个多变量、变参数、强耦合和非线性的复杂对象。传统的PMSM 矢量控制采用转速和电流PI控制器结合,其设计通常采用先内环后外环的方式,较为繁琐,且由于传统的矢量控制中存在级联结构,控制系统的动态性能和抗扰性能有所下降[1]。
状态反馈控制只设计一个控制器,消除了传统PI控制器的级联结构,提高了控制系统的抗扰性能[2]。线性二次型调节器(Linear Quadratic Regulator,LQR)优化法为状态反馈控制器(State Feedback Controller,SFC)的一种设计方法,其广泛应用于PMSM的SFC设计中,但在利用LQR 设计SFC 之前,需要对控制对象进行线性化处理。文献[3]中在PMSM额定工作点进行局部线性化,该方法计算简单,但当电动机运行在其他工作点时存在一定的误差。文献[4-6]中采用前馈补偿的方法对PMSM模型进行解耦,从而得到其线性化模型[7-8],但对于内嵌式PMSM 来说,这种方法无法消除磁阻转矩这一非线性项,即使采用id=0 控制方式也不能消除暂态过程中内嵌式PMSM 的非线性[9-10]。文献[11]中采用反馈线性化方法对内嵌式PMSM进行了线性化处理,该方法通过状态反馈和坐标变换,代数地将非线性系统部分或全部转换为线性系统。
传统LQR中的加权矩阵采用试错法确定,但该方法计算量大,难以使控制系统优化效果最佳[12-13]。越来越多学者考虑将智能算法与LQR结合,以优化SFC的设计。文献[6]中利用SFC 对PMSM 进行速度控制,同时借助人工蜂群(Artificial Bee Colony,ABC)算法在线调整其系数,从而使得控制性能不受电动机参数变化影响,实时保证系统具有最佳的动态响应。文献[7-8]中分别针对无轴承PMSM和永磁同步轮毂电动机提出了一种由灰狼优化(Grey Wolf Optimization,GWO)算法调优的SFC,该控制器具有良好的跟踪和抗干扰能力。
在上述研究的基础上,本文利用输入输出反馈线性化将PMSM 非线性数学模型转化为线性状态空间模型,设计基于LQR 的SFC;同时采用GWO 算法对LQR中的加权矩阵Q和R进行优化,并进行Simulink仿真和实验验证。
1 基于反馈线性化的PMSM状态反馈控制
dq坐标系下内嵌式PMSM的动态数学模型为:
式中:id和iq分别为三相定子电流在dq轴的分量;ud和uq分别为dq轴电压;ωm为电动机的机械角速度;Rs为定子电阻;Ld和Lq分别为dq轴电感;p为电动机极对数;ψf为电动机转子磁链;J为电动机转动惯量;TL为负载转矩。
本文选择id和ωm作为PMSM 控制系统的输出,将式(1)的内嵌式PMSM 动态数学模型变换成如下形式:
式中:
根据输入输出反馈线性化原理,选择坐标变换如下:
式中:z=[z1z2z3]T为新的状态变量;Lfh2(x)=为h2(x)对f(x)的李导数。则在新坐标系下系统的状态方程变为:
式中:
由此,便可以针对该线性状态空间模型设计SFC,即v= -Kz(K为反馈增益矩阵),此时反馈控制律为:
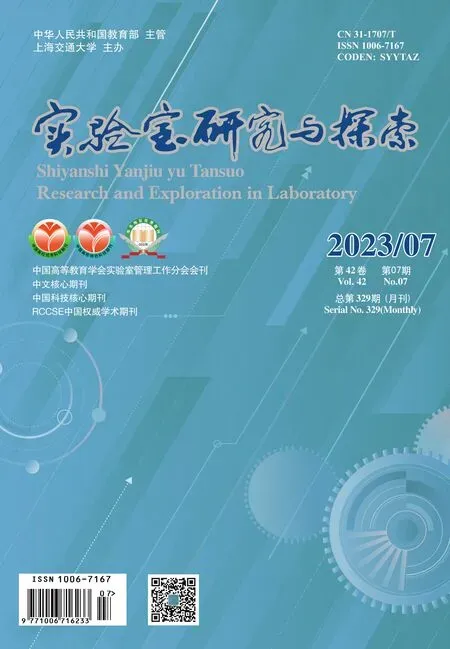
内嵌式PMSM输入输出反馈线性化框图如图1 所示。
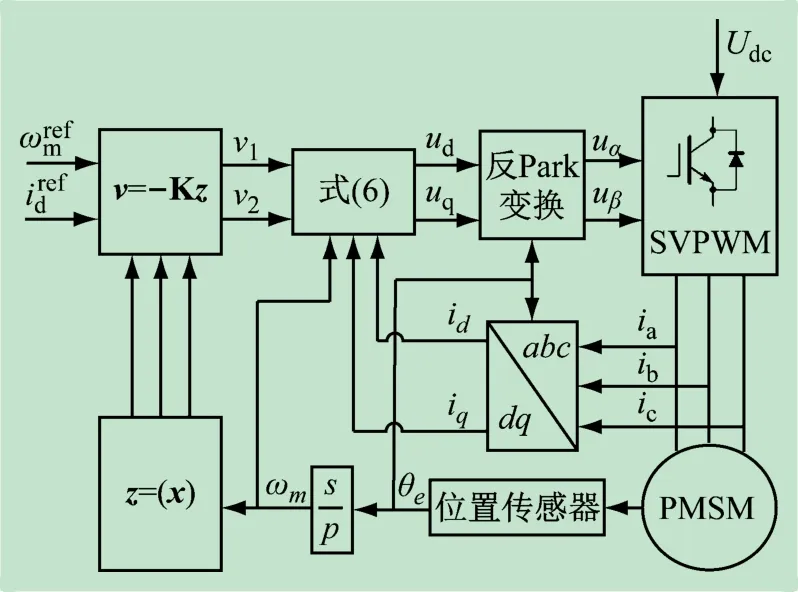
图1 内嵌式PMSM输入输出反馈线性化框图
由于SFC只包含比例调节算法,为了保证控制系统在各种负载条件下跟随给定时的稳态误差为零,还需引入积分调节算法[14],本文针对输出ωm和id分别引入相应的积分调节算法,以保证在各种负载条件下电动机转速跟随给定转速时无稳态误差,同时保证控制系统具有良好的id=0 控制效果。
引入积分调节算法的方法是针对ωm和id引入误差的积分量,并将其添加到系统的状态空间模型中,本文引入了2 个积分量为:
将式(7)的2 个积分量添加到式(5)的状态空间模型需要进行坐标变换,由式(3)的坐标变换式可得到2 个新的状态变量为:
将以上2 个新的状态变量添加到式(5)的状态空间模型得到扩展状态空间模型为:
式中:
本文借助最优控制理论中的LQR算法,通过选取加权矩阵Q和R来确定K,从而使得以下目标函数最小[15],即
式中:M为目标函数值,x为系统状态变量,u为系统输入,Q和R为加权矩阵。
2 基于GWO算法的SFC设计
LQR的加权矩阵Q和R决定了控制系统的动态性能,传统的LQR采用试错法选择加权矩阵Q和R。为使控制系统性能达到最优,本文采用GWO 算法对加权矩阵Q和R进行优化。
2.1 GWO算法原理
GWO算法是一种新型的群体智能优化算法,它基于灰狼捕食猎物行为模拟了灰狼群体协作捕食猎物的行为,其中包括3 个主要过程:跟踪猎物、包围猎物、攻击猎物。如图2 所示,狼群中存在着严格的等级制度,它们的等级由自身的适应度函数值确定。每个等级的狼各司其职,在每次迭代过程中,狼群会依据适应度函数值选出α、β和δ狼,底层狼θ则依据α、β和δ狼的位置更新自身的位置[16]。

图2 灰狼社会等级制度示意图
跟踪猎物的任务主要由α、β和δ狼完成,包围猎物的任务主要由θ狼完成,可以用以下的表达式表示灰狼包围猎物的过程:
式中:D为灰狼与猎物的距离向量;Xp(t)为猎物当前的位置向量;X(t)为灰狼当前的位置向量;X(t+1)为更新后灰狼的位置向量。系数向量G和H分别为:
式中:g为收敛因子,其模值随迭代次数从2 线性递减到0;r1和r2为模为0 到1 之间的随机向量。
将α、β和δ狼的位置作为猎物的位置,这样得到实际的灰狼包围猎物的表达式如下:
式中:Dα、Dβ和Dδ分别为底层狼θ与α、β和δ狼的距离向量;Xα、Xβ和Xδ分别为α、β和δ狼当前的位置向量;X为底层狼θ当前的位置向量
式中,X1、X2和X3分别为α、β和δ狼给出的移动命令,则
式中,X(t+1)为更新后灰狼的位置向量。
灰狼包围猎物的示意图如图3 所示。
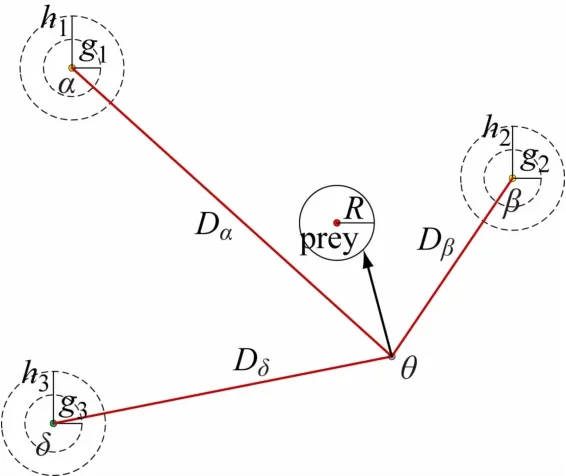
图3 灰狼包围猎物示意图
图中:Dα、Dβ和Dδ分别为θ狼与α、β和δ狼的距离;g1、g2和g3对应系数向量G;h1、h2和h3对应系数向量H。保证算法在迭代过程中的随机性,即使得θ狼具备全局搜索能力。
系数向量G可以描述灰狼攻击猎物的过程,当>1 时,在算法迭代初期有利于寻找全局最优解;当<1 时,在算法迭代后期有利于算法的收敛。
2.2 基于GWO算法的SFC设计
适应度函数的选择对算法的寻优过程具有重要影响,其选择应与控制目标相一致。本文的主要控制目标是使电动机转速在各种负载条件下都能跟随给定值,次要目标是使控制系统具有良好的id=0 控制效果。基于以上的控制目标,本文选择适应度函数为
式中:N为总采样次数;n为当前采样次数;Ts为采样时间;Δeω(n)=ωn(n)-(n),Δeid(n)=id(n)-。计算底层狼θ的适应度函数值的流程如图4所示。

图4 计算底层狼θ适应度函数值流程图
3 Simulink仿真和实验验证
经过GWO算法优化后的加权矩阵Q和R为:
使用Matlab中的lqr函数计算得到优化后的反馈增益矩阵:
将优化后的K代入仿真模型中得到:①电动机在变载情况下(0.1 s时突加5 N·m负载,0.3 s时又突卸负载)的仿真结果(见图5)。系统具有良好的抗负载扰动能力。②电动机在变速情况下(开始给定转速设为400 r/min,0.1 s时变为500 r/min,0.3 s时又回到400 r/min)的仿真结果(见图6),系统在转速突变的情况下仍具有良好的转速跟随能力。③电动机正反转(开始给定转速设为400 r/min,0.1 s 时变为-400 r/min,0.3 s时又回到400 r/min)的仿真结果(见图7),通过GWO算法设计SFC 在电动机正反转情况下也能保持良好的控制性能。
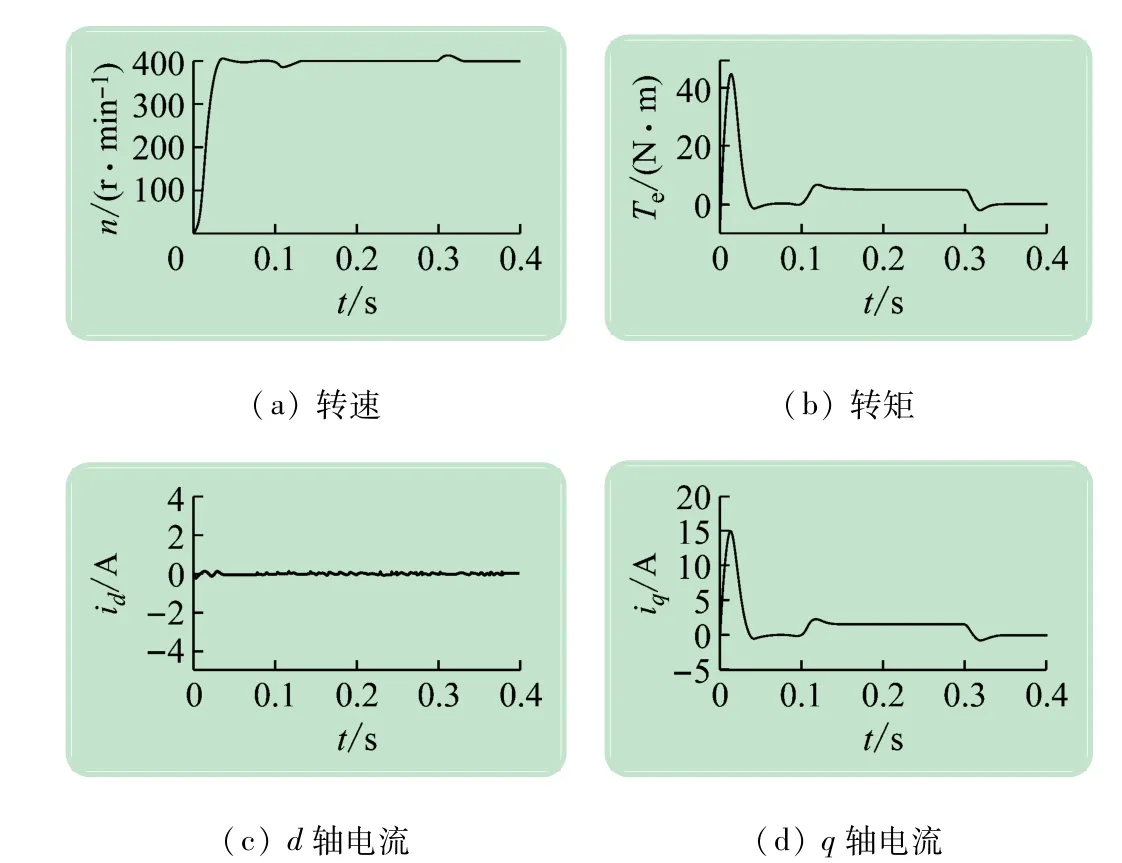
图5 PMSM变载情况下GWO算法仿真波形

图6 PMSM变速情况下GWO算法仿真波形

图7 PMSM正反转情况下GWO算法仿真波形
如图8 所示为PMSM 实验平台实物,采用TMS320F28335DSP 作为控制芯片,在Code Composer Studio软件下进行编程操作,采样周期选为0.1 ms。对应PMSM的参数如下:电动机的额定功率为2.2 kW,额定电压为380 V,额定电流为3.98 A,额定转速为1500 r/min,定子电阻为2.484 Ω,d轴电感为63.4 mH,q轴电感为0.18 H,极对数为2,转子磁链为0.993 Wb;电动机采用一个2500 线的增量式光电编码器进行测速,使用磁粉制动器来提供负载。

图8 PMSM实验平台实物图
图9 ~11 所示分别为在变载、变速、正反转时的实验波形。由图9 可知,在变载条件下,给定转速400 r/min,0.1 s 时突加5 N·m 负载,0.3 s 时又突卸负载,电动机电磁转矩在0.1 s时上升为5 N·m,在0.3 s时下降为0 N·m,转速响应稳定,说明系统对突加负载和突卸负载具有良好的抗扰性能。由图10 可知,当给定初始参考转速为400 r/min,0.1 s 后转速设为500 r/min,0.3 s 后转速又为400 r/min 时,转速响应稳定,说明系统在变速情况下有较好的转速跟踪性能。由图11 可知,当给定初始参考转速为400 r/min,0.1 s后设为-400 r/min,0.3 s 后又回到400 r/min 时,转速响应迅速,说明系统在正反转情况下仍有较好的控制性能。实验结果与仿真效果基本一致,证明了理论的正确性以及该方法的实用性。
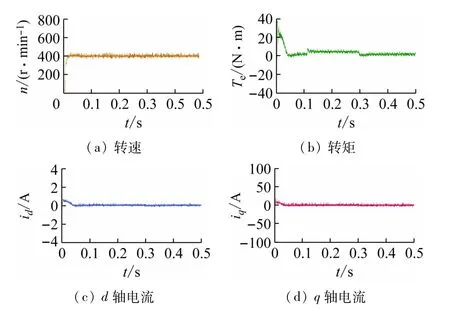
图9 PMSM变载情况下实验波形
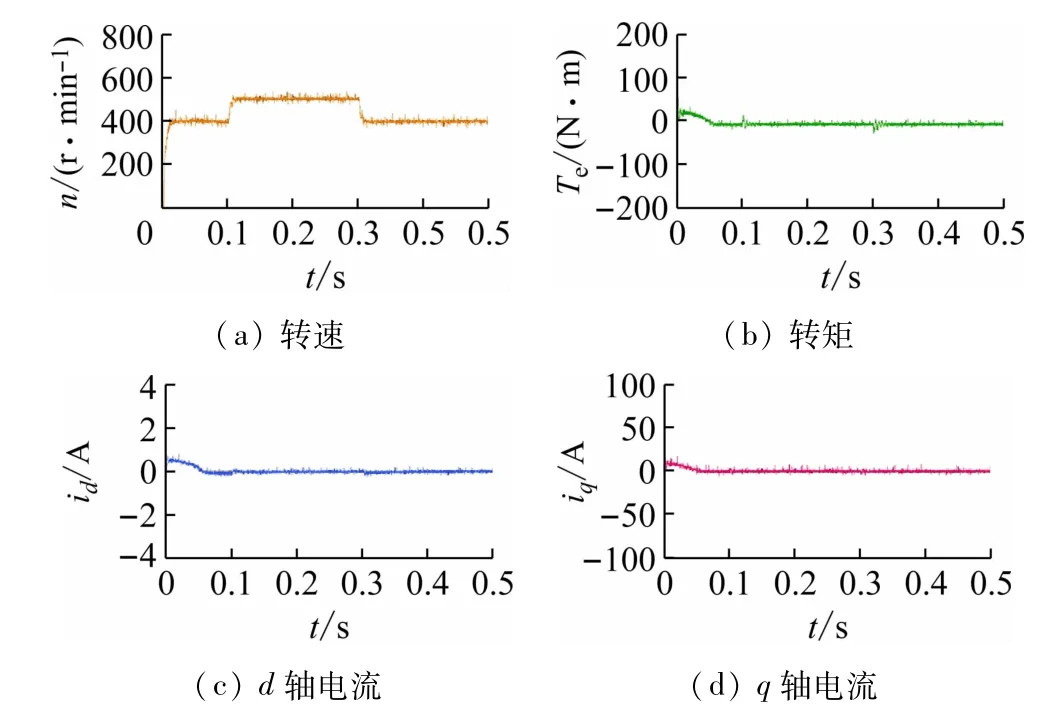
图10 PMSM变速情况下实验波形
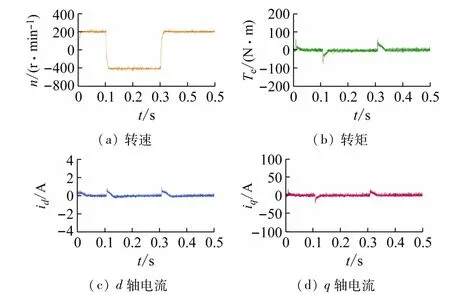
图11 PMSM正反转情况下实验波形
4 结语
本文主要针对基于反馈线性化PMSM 的SFC 开展了研究。通过Matlab 仿真软件和PMSM 实验平台完成了电动机在变载、变速和正反转情况下的仿真和实验。结果表明:基于GWO 算法设计的SFC 能够保证电动机在变载、变速和正反转情况下稳定运行;在PMSM抗负载扰动和转速跟踪方面有着良好的控制效果。
·名人名言·
只有严格的专业化能使学者在某一时刻,大概也是他一生中唯一的时刻,相信自己取得了一项真正能够传至久远的成就。今天,任何真正明确而有价值的成就,肯定也是一项专业成就。
——马克斯·韦伯
猜你喜欢
中等数学(2020年2期)2020-08-24 07:58:46
小太阳画报(2019年1期)2019-06-11 10:29:48
测控技术(2018年9期)2018-11-25 07:44:24
数学大王·低年级(2018年5期)2018-11-01 10:34:06
纤维复合材料(2018年3期)2018-04-25 07:22:50
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
快乐语文(2016年15期)2016-11-07 09:46:31
光学精密工程(2016年3期)2016-11-07 09:03:32
电机与控制应用(2015年2期)2015-03-01 03:49:23
读写算(中)(2015年6期)2015-02-27 08:47:14