
基于QFD 和TRIZ 理论的康复机器人设计研究
2023-10-26 11:53:12刘宏越李嘉欣胡昌格
工业设计 2023年9期
刘宏越 李嘉欣 胡昌格
(天津工业大学机械工程学院,天津 300387)
近年来,随着社会老龄化程度的不断加深及各种先天疾病、突发事故等,医疗康复系统将迎来新的机遇[1]。将机器人设备应用于日常生活、康复训练、灾难支援等研究已经成为各国名校及相关组织的研究热点[2]。康复机器人的出现适合周期长、高频率、高重复的医疗康复训练,可以将康复训练医师从单一性的劳动中解放出来[3]。为了有效解决康复机器人的用户需求和设计要素,设计流程需借助QFD、TRIZ 理论进行构建,从而在结构、功能和形式上不断创新。Moran 等构建了KANO、QFD、TRIZ 等工程集成方法,用于考察临时难民住房设计,并提供一种创新设计方案[4];韦艳丽等将QFD 与TRIZ 理论相融合应用于帕金森患者助行器优化设计中,实现了产品多功能维度的转化[5];周红宇等以基础功能需求为出发点,构建QFD 与TRIZ 集成设计模型对电热水器进行创新设计,提高了用户的使用满意度[6];QFD 强调通过市场调研和用户访谈等方法获取产品的功能需求,通过用户体验调查和评价收集用户反馈信息进行合理评估,但无法获得详尽的解决途径。而TRIZ 通过对技术系统进行分析、构建冲突矩阵,并对发明原理进行搜索以获得最优解,但是无法对矛盾冲突之间的关联作出解答。QFD 注重易于配置和满足需求的目标指向,TRIZ 注重具体功能的实现途径。基于此,文章基于QFD 及TRIZ理论探讨康复机器人设计的思路。
1 相关概念解析
1.1 QFD
QFD 注重用户需求与产品设计要素之间的关系[7],强调通过提高用户满意度确保市场的占有率[8],它的核心内容是用户需求与产品设计要素之间的需求转化,是基于用户需求启动的产品创新方法[9],它的表达方式主要以质量屋HOQ 构建图表的形式呈现[10]:(1)左墙用于导入用户需求信息与重要度;(2)天花板是针对各项用户需求逐一列出相对应的产品设计要素;(3)房间为用户需求与设计需求要素之间的关系矩阵;(4)屋顶可以确定设计需求要素之间的正负关联性;(5)右墙可以计算市场的竞争能力,用于顾客评价产品彼此的竞争关系;(6)计算地板设计要素需求的重要度,反映了创新设计过程中实现设计目标具有一定的挑战性;(7)地下室计算技术竞争力,根据企业技术制造能力等,确定各项设计要素的新产品实现水平,并进行定量评分,HOQ 模型如图1 所示。
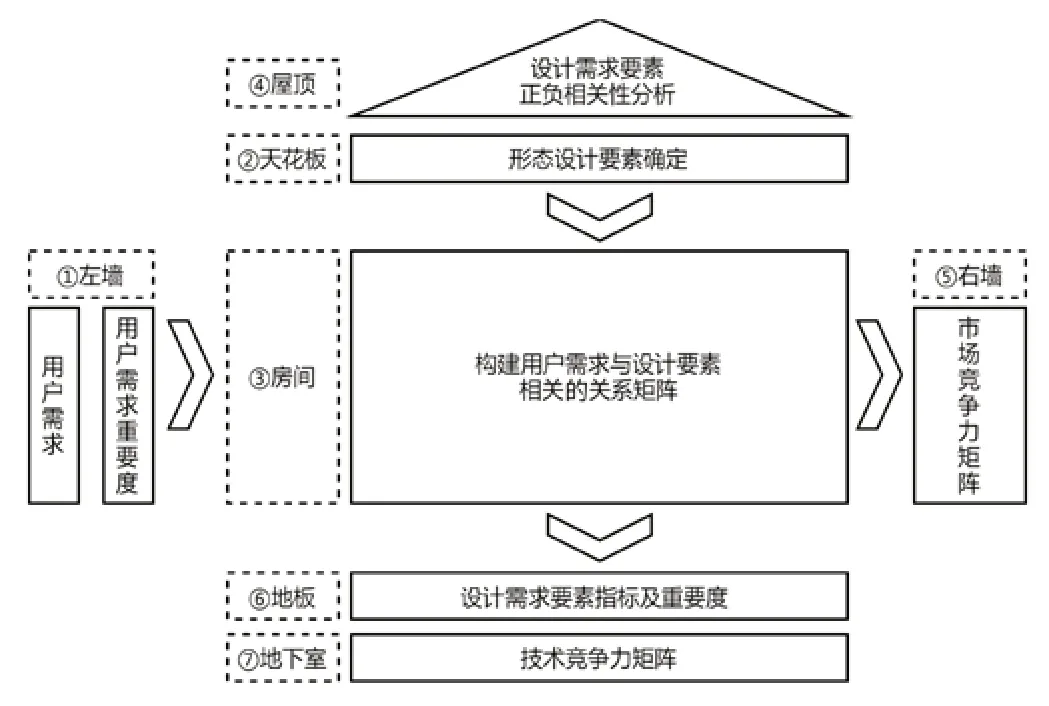
图1 质量屋结构图
1.2 TRIZ 理论
TRIZ 理论是科学家阿奇舒勒基于大量技术专利,总结发明的一套系统问题解决理论。它阐述了创造发明的内在规律与原理[11],认为设计师对待设计过程中的矛盾冲突不应采取妥协、折中的方式,而是应该完全解决矛盾冲突。TRIZ 理论将待设计产品的核心问题转述为TRIZ 系统的表达方式,再利用40条创新原理、矛盾矩阵表、功能分析、76 个标准解和TRIZ 等解决问题的基本工具,帮助设计者打破以往进行产品设计的固化思维,迅速求解出该问题的最优解[12]。
2 康复机器人设计现状
康复机器人起源于20 世纪80 年代,如今,康复机器人的研究涉及康复医学、生物力学等诸多领域,已经成为医疗系统中不可或缺的一部分。针对老龄化或残障人群的康复机器人,从功能设计上可将它大致分为康复训练、生活辅助康复机器人两大类[13-14]。康复训练类机器人可以通过主动和被动的康复训练模式,辅助相关人群完成各种运动功能的康复训练,降低服务人员的劳动强度。生活辅助类康复机器人为人群提供各种生活辅助并补偿它弱化的机体功能。此外,助力类型大致分为主动型助力和被动型助力两种[2]。不同的助力类型对人的使用、心理和生理体验,以及对康复机器人的性能评价均会造成不同的影响。
3 基于QFD 和TRIZ 理论的康复机器人设计思路
研究将QFD 和TRIZ 理论整合并应用,QFD 以用户需求为驱动,为产品开发提供理论依据;TRIZ有效解决了矛盾冲突问题,基于QFD 和TRIZ 理论的集成创新应用框架,如图2 所示。

图2 基于QFD、TRIZ 理论的集成创新应用框架
3.1 康复机器人的质量屋构建
建立康复机器人质量屋的第一步是组建QFD 团队小组,进行老龄化或残障人群患者调研和康复设备市场分析,小组通过调研分析,收集筛选和归纳整理获得的用户需求,并对每项需求进行重要性程度分级,可用1 至5 来表示,重要度随数字逐级递增,用户需求可用权重表示:
对调研数据结果解析,康复机器人设备用户需求如下:(1)造型独特美观;(2)色彩搭配合理;(3)材料选取恰当;(4)功能齐全;(5)机器人易穿戴、可调节;(6)机器人使用操作简易化;(7)机器人的康复助力力度;(8)机器人的运动匹配性;(9)机器人轻量化;(10)交互顺畅,符合人因关系;(11)提前避险意识,安全性强;(12)久经耐用,适应不同环境;(13)适用不同的康复训练活动;(14)维护方便;(15)故障率低,如表1 所示。

表1 用户需求表
将转化的产品设计要素定性问题量化处理,以便对产品设计要素的可行性进行科学评估:
根据目标用户实地调研、产品市场考察,以及相关专利查询,研究分析发现目前康复机器人设计需求要素的重点在于:(1)助力机器人结构:输送压管、肢体(输送受力)转轴、负载转换装置、动力驱动机构、电机;(2)整体尺寸:转轴尺寸、压杆尺寸、电机尺寸、负载支撑尺寸;(3)传感器应用:肌肉疲劳程度感应、障碍感应预警、关节力感应;(4)动力供给装置:主动性供给电池、被动性柔性材料。
为了规划新产品的市场定位、评估新产品如何有效地满足客户需求,将新产品与竞争对手的产品进行比较。市场竞争力M可用5 个数值表示,1 至5分别为:次弱、弱、中强、次强、强竞争力,则:
提前预估新产品制作的技术可行性,确保必要的技术改造或技术突破,以此完成量化评分。采用下列1 至5 个数值表示,1 至5 分别为:技术水平劣等、次等、一般、良好、优秀,则:
综合竞争力分析公式表示:
3.2 用户需求与设计要素关系矩阵的建立
在建立关系矩阵时,通过调研分析及资料收集,确保完成用户满意度需求和设计需求要素的映射关系,可用0~9 标度表示量化处理的相关程度。即为用户要求与设计需求的关系度R,通过分析可建立如下关系矩阵:
根据用户需求权重公式(1)可得到重要度权重(0.060,0.039,0.060,0.078,0.078,0.060,0.098,0.078,0.060,0.098,0.078,0.060,0.078,0.039,0.039)。
根据设计要素权重公式(2)可得到重要度权重(178,240,146,149,128,100,106,122,132,264,167,248,203,185)。
同理可得,可用1~5 标度表示,关系度等级。根据市场力竞争权重公式(3)可得到重要度权重(0.35,0.91,0.48,0.63)。
根据技术力竞争权重公式(4)可得到重要度权重(0.36,0.80,0.50,0.59)。
根据综合力竞争公式可得数据(0.126,0.728,0.240,0.372)。集中整理用户需求与设计要素映射关系并结合各项数据统计结果,以此来建立完整的康复机器人质量屋,如图3 所示。
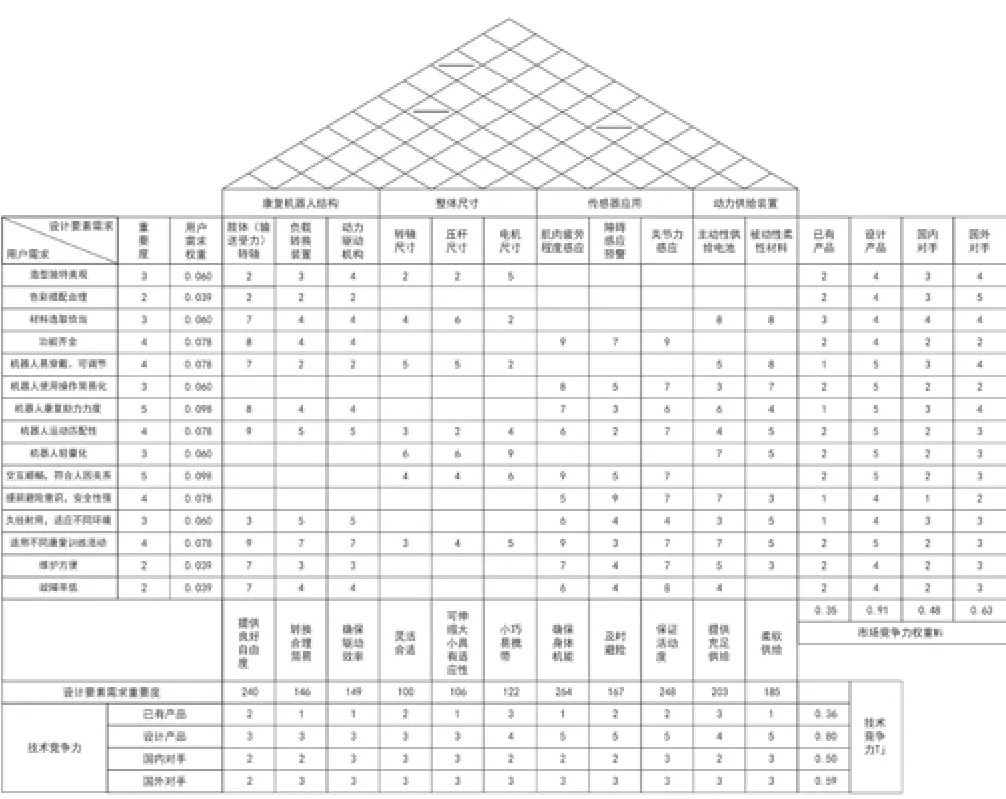
图3 功能质量屋
3.3 明确矛盾冲突并将建立问题模型
存在的矛盾冲突:(1)肢体转轴机构与康复机器人关节力感应;(2)肌肉疲劳程度感应与负载转换装置;(3)电机尺寸大小与电机供给量。
建立原问题的求解问题模型:(1)装置的复杂性——监控与测试的困难程度,对应解决方法:10、15、28、37,预操作、动态化、机械系统的替代、热膨胀;(2)测试精度——运动物体重量,对应解决方法:26、28、32、35,复制、机械系统的替代、改变颜色、参数变化;(3)静止物体的重量——静止物体的能耗,对应解决方法:6、9、15、27,多用性、增加反作用、动态化、廉价替代品,如表2 所示。

表2 康复机器人矛盾冲突问题求解方法
通过调研分析可知,满足用户所需的康复机器人,与上述矛盾类型对应可行的发明原理有:15、35、6,如表3 所示。

表3 发明原理及其创新方向
具体发明原理应用如下:
1)动态化:根据调研数据结果显示,肢体转轴机构和关节感应力是康复机器人的主要需求之一。与以往协助患者进行康复训练的设备不同,康复机器人是多系统结构,通过多关节部位安装的传感器进行数据收集与控制器数据分析处理,向机器人发出命令并执行机构协助完成康复训练动作。因此,康复机器人的转轴机构不得干预关节活动角度的范围,以及关节力感应数据的采集和分析处理。将传感器与关节处的转轴机构协同一体,利用转轴机构的运动范围带动传感器活动,使不动变可动,增加它的自适应性和关节力感应精准度。
2)参数变化:老龄化、残障人群等需要康复或助力运动训练,帮助患者恢复日常生活的自理能力,避免身体体适能过量流失,但传统康复训练设备负载装置的静载强度往往会使肌肉疲劳。在保证康复训练、运动速度、驱动力矩和关节活动角度等前提下,针对不同部位的负载装置选择不同的材料,确保负载装置具备适当强度、轻量化、柔韧性等。在一定程度上降低负载装置的静载强度对患者产生的身体机能损耗和肌肉疲劳,为患者带来尽可能高效的康复训练。
3)多用性:目前使用康复设备的人群多为疾病患者、残障人群等,体能相较于正常人水平偏低,因此电机尺寸和电池性能配置是提供康复训练时长的关键因素。在保证电机转换和传递效率、电池容量和充电功率等电池状况较好的前提下,赋予主动性供给电池吸收其他形式的能量,并可将它储蓄为电能,通过电机实现电能转换或转递,提高主动性供给电池的持续性和电机转换效率的性能配置,降低康复训练设备的充电频率。
4 康复机器人设计实践
通过调研发现,在康复过程中,助力施力点在腰部L4/L5~S1。腰部生物力学模型以较常见的举重为例进行研究[15]。以L5/S1 关节处平衡进行受力分析:G1 为物体重力,力臂为L1,G2 为人体上肢躯干重力,力臂为L2;Fe 为人体胸肌产生的肌力,Fa为背部肌肉产生的肌力;F1 为人体下肢对腰椎的支持力,F2 为脊柱产生的拉力,力臂为L4;F3 为腹肌引起的腹压,力臂为L3;F4 是腰椎或骶椎承受压力,力臂是L5。若使人移动重物时保持静态平衡,则O点处力矩之和应为零,可得到以下公式:
在不穿戴康复训练设备时,人弯腰搬运重物时腰椎或骶椎所受压力F4 的计算公式:
将人物进行简化,如图4 所示。并模拟康复过程中的人物基本姿势和关节受力分析,如图5 所示,进一步为康复机器人提供设计依据。

图4 人物关节散点简化图
根据上述基于QFD 和TRIZ 理论集成创新应用步骤,以及腰部生物力学的分析,对康复机器人的整体外观设计、受力关节感应、助力支撑部位等方面进行分析创新,构成以腰部为主要支点的康复机器人设计方案,如图6 所示。

图6 康复机器人设计方案
在外观造型设计方面,整体线条曲直结合,对康复机器人的输压转轴、负载支撑装置、腿部固定装置等机械外观造型进行精致细化处理,运用Rhino 进行2D 概念设计模型转化为3D设计模型,并通过Keyshot 软件进行模型色彩、材质等渲染,得到康复机器人的外观设计效果图,如图7 所示。

图7 康复机器人设计效果图
5 结论
当前我国社会老龄化趋势明显、残障人群日益增多,新一代的医疗康复系统及康复机器人已成为着重关注的问题。文章基于QFD 生成用户需求与产品设计要素需求的有效转化并进行相关性评估,功能需求与设计要素之间正负相关性的矛盾冲突由TRIZ 理论解决,再运用计算机辅助软件虚拟设计出创新方案。通过设计实例论证康复机器人人因工程智能装备创新设计存在以下几个特点:(1)保证康复设备结构,特别是肢体转轴,不影响关节的活动自由度和感应精准度;(2)肌肉疲劳程度和康复设备机构静载强度的适配性,当前主动型机器人康复训练效果明显,但外骨骼框架过于繁重,导致先行消耗患者的身体机能,预先造成肌肉疲劳,大大降低了康复的训练效率;(3)电机尺寸与主动性供给电池的性能配置,现有的康复训练设备需频繁的为电池供电、设备充电,且在电机转换能量的过程中存在部分能量损失,导致储能成本高,能量转换效率低,能量利用率低等情况;(4)康复机器人不够拟人化,可能会擦伤穿戴者的人体皮肤、同时薄弱的感知应对危险情况的处理能力,以及抗干扰性差等问题也会导致穿戴者二次受伤。但文中缺乏设备的控制策略及生物信号采集与处理的研究,接下来将进一步通过仿真模拟软件与肌电仪进一步完善研究,为后续迭代康复机器人的研发设计提供参考。
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:38:58
中华养生保健(2020年2期)2020-11-16 00:49:06
当代水产(2020年4期)2020-06-16 03:23:30
现代园艺(2017年22期)2018-01-19 05:07:22
河北书画研究(2017年1期)2017-08-22 12:11:50
制造业自动化(2017年2期)2017-03-20 14:26:12
山东青年(2016年2期)2016-02-28 14:25:36
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
