芳烃制冷机组VOITH液力耦合器RWC800M8控制方案
2023-10-25 01:46丁锦萍田鸿鹏
仪器仪表用户 2023年11期
丁锦萍,田鸿鹏
(岳阳长炼机电工程技术有限公司 宁波分公司,浙江 宁波 315812)
0 引言
某炼油化工厂芳烃装置乙烯制冷和丙烯制冷均采用了一台多级离心压缩机。乙烯冷剂主要为三级结晶器提供冷量,通过不同的压力闪蒸实现各级结晶器温度的需求。丙烯冷剂主要用于冷却乙烯压缩机出口的高温乙烯,以及用于结晶进料的调温冷却,不同的温度需求同样是通过不同的压力闪蒸实现各级加热和闪蒸后的乙烯和丙烯蒸汽,逐级返回到压缩机的各级入口进行压缩,从而完成一个循环。制冷部分通过设置各级闪蒸以及压缩机多级压缩,实现冷量的分级利用和压缩机的逐级压缩,最大限度降低了压缩机能耗。
本文介绍乙烯制冷机组液力耦合器,耦合器采用VOITH 公司的增速型液力耦合器RWC800M8。齿轮增速型液力耦合器是一种无级变速的机械装置,它主要由齿轮、泵轮、涡轮、勺管、输入轴、输出轴等主要部件组成,能量调节通过调速液力偶合器无磨损地从传动机器向被驱动机器传送动力。通过勺管调节泵轮、涡轮中的油位来调节输出轴转速,从而实现节能目的。耦合器现场设备控制部分由VCU 控制单元和CCS 控制单元组成。
1 液力耦合器工作原理
机组通过液力耦合功能实现电机无负载启动。液力变矩器带可调导叶,液力耦合器带可调勺管及电液执行器VEHS,旋转行星齿轮,速度叠加,调节被驱动机转速,如图1 所示。
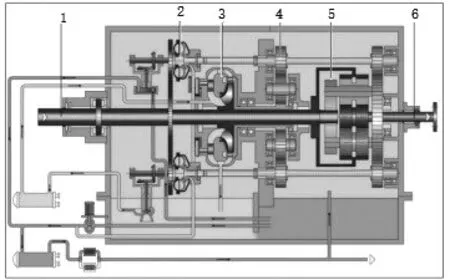
图1 VORECON组成部件Fig.1 VORECON Components
Voith 电液转换器(VEHS)的结构包括:控制磁铁、PID 定位装置、磁力控制器、四位三通阀、控制销。连接到双作用液压定位缸,其活塞与导叶调节机构机械连接,确定导叶当前位置的位置传感器。
VEHS 过程控制器(主控制回路)位于VEHS 定位控制装置前,从此处给出一个4mA ~20mA 的设定值信号。VEHS 的附助装置Voith 带有一个PLC 可编程系统。
勺管位置取决于VEHS(Voith 电液转换器)的驱动。勺管的位置由机械局部显示,通过在定位器上指示实际值,也用于远程显示。过程控制器向VEHS 定位控制单元发送设定点信号,例如“最大输出速度”(100%)。定位控制回路将“由位置传感器测出的勺管位置实际值”与过程控制器的“设定值(信号)”进行比较。由此产生的差异向磁力控制器发出信号,以改变4/3 通阀中控制销的位置。由于控制销位置的改变,控制油流入或流出双作用定位油缸。控制油流入定位油缸的腔室(b),并将导叶的定位环移动到100%位置,最大油环,最大输出速度。定位油缸的位置变化由位置传感器感测,并连续发送给定位控制电路。随着差值减小,4/3 通阀中控制销位置的变化减小,直到设定值和实际值匹配。在反向操作中,控制油流入定位油缸的腔室(a),并将导叶的定位环移动到0%的调整角度,最小油环,最小输出速度,用于液压导叶调整的油从润滑油路分流,控制油压设置在机械驱动的增压泵和限压阀上。
2 Vorecon控制单元(VCU)
VCU 控制单元的硬件是西门子S7-1500 PLC。Siemens S7-1500 PLC(CPU 1513-1 PN)7 英寸触摸操作面板(HMI TP700 Comfort Outdoor)安装在PLC 接线盒的前门(见图2),CPU 使用Profinet IO 与HMI 通信。
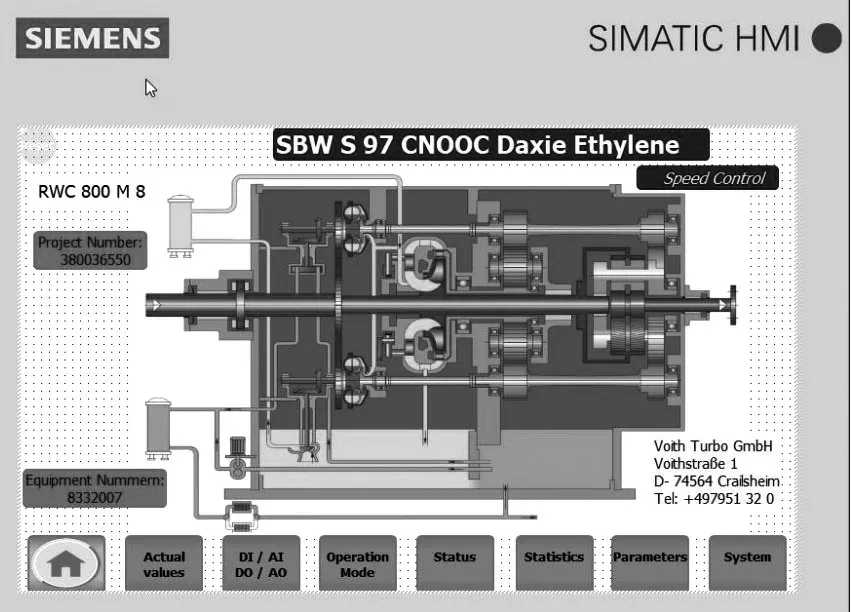
图2 触摸操作面板Fig.2 Touch operation panel
VCU 为RWC M Vorecon 执行启动和速度控制。VCU 还控制Vorecon 部件,如液力联轴器(启动联轴器)和变矩器。VCU 不执行任何Vorecon 监控功能,例如振动、轴承温度、工作油温、联轴器/变矩器出口温度、油位和润滑油压力,不执行启动油加热器、热交换器和辅助润滑油泵的控制功能。这些功能由中控CCS 系统实现,为此Voith也提供一个特殊的控制逻辑。
3 控制方案
耦合器振动、键相、轴温,润滑油液位、温度、压力等经现场信号送至CCS 系统控制。转速、勺管位置信号送至现场VCU 控制后,转至CCS 系统控制。工作油压和电液转换器控制阀、转换电磁阀信号在现场VCU 控制。VCU 控制部分与CCS 控制系统之间的接口信号均采用硬接线。
3.1 VCU和CCS之间的信号
如果Vorecon 因“TRIP”故障而停止,则故障原因必须消除,然后才能复位,只要TRIP 未被确认,VCU 将保持在TRIP 状态,无法重新启动Vorecon。启动Vorecon 之前,必须打开辅助润滑油泵,只要Vorecon 上存在润滑油压力,要求辅助润滑油泵或机械润滑油泵必须运行。如果该为假,则禁止启动Vorecon。当主电机启动时,CCS 至VCU 信号变为真。当主电机启动完成时(主电机以额定速度运行并准备好负载),该输入必须始终处于真状态。如果输入变为真,同时怠速输入变为假,则在Vorecon 中从启动联轴器切换到变矩器,速度控制将延迟释放,时间延迟可在HMI 上编程。一旦主电机停止,该输入必须变为假。针对这些情况,增加4 个开关量输入点在VCU 控制。
当主电机启动完成且未请求怠速运行时,VCU 将根据该模拟输入值(在自动远程模式下)控制Vorecon 输出速度。速度范围(最小和最大速度)的参数可在VCU 的HMI上配置。默认为5500rpm ~8260rpm。增加1 个模拟量输入点在VCU,自CCS 过来。
当VCU 无测试模式,Vorecon 输出速度<2.0%;导叶位置<2.0%;VCU 无故障(公共跳闸)。液力联轴器(启动联轴器)中存在压力工作油,润滑油压力存在。如果此信号输出为假,禁止启动主电机或Vorecon。输出一个信号至CCS,若此信号输出为真,Vorecon 准备启动。在启动主电机之前,必须由CCS 控制系统检查该输出。
VCU 控制部分设置通用故障报警信号和故障跳闸信号,故障报警信号输出为真时,至少存在一个公共报警故障。故障的信息显示在VCU 的HMI 上,报警不需要手动确认。当故障消失,此输出将自动重置,HMI 上的信息将消失,但它仍在历史报警中。故障跳闸信号输出为真时,至少存在一个跳闸故障,故障的原因显示在VCU 的HMI上。这种故障导致主电机停机,设置现场设备切换到停止状态。此信号输出为真时,当主电机为停止,在这种情况下,CCS 控制系统必须启动电动辅助润滑油泵;此信号输出为假时,涡轮停止时不存在输出速度。
转速信号分为2 个轴输出转速和2 个中间转速,分别使用二选一逻辑,选择最安全转速输出给CCS 系统。
勺管实际位置经过VCU 输出至CCS 作为反馈:4mA~20mA=>0~100%
变矩器导叶执行器的实际位置给定:4mA~20mA=>0~100%
3.2 Vorecon至VCU控制器信号
4 个转速信号是德国Braun 转速探头A5S1DD4,该探头向TM 计数输入模块提供频率信号。VCU 用于控制和监控,分为Vorecon 中间速度2 个和Vorecon 输出速度2 个,分别使用二选一逻辑,选择最安全转速输出给CCS 系统。
液力耦合器工作油压变和变矩器下游工作油压送器在VCU 控制。实际导叶位置输出和反馈均在HMI 上显示,速度控制器(VCU)将设定值输出至VEHS 定位控制器,从而控制变矩器的导叶位置。
停机状态下,在机组停止位置,“润滑油压力存在”信号不存在。启动联轴器和变矩器均已排空。停机状态电磁带电阀状态:启动联轴器2 号电磁阀得电,变矩器1 号电磁阀得电。
RWC 启动状态,一旦输入“压力润滑油存在”变为真,启动状态电磁带电阀状态为:启动联轴器1 号电磁阀得电,变矩器2 号电磁阀得电。
必须满足以下条件才能发出信号:VCU 无测试模式;Vorecon 输出速度<2.0%;导叶位于起始位置;VCU 无故障(公共跳闸);液力联轴器(启动联轴器)中存在压力工作油;润滑油压力存在。
主电机启动完成后(输入信号“主电机启动”和“主电机准备加载”必须为真),Vorecon 将转换到正常速度范围。
VCU 的HMI 有以下功能:显示与控制工程相关的所有变量(速度、PID_Output 等),显示有关VCU 状况的状态信息,显示Vorecon 电磁阀开关状态的状态输出,显示所有故障信息,可通过HMI 更改速度控制调整和优化所需的所有参数,操作模式变更。
在停机检修状态,可在HMI 上手动对VEHS 导叶执行器和电磁阀测试。
3.3 CCS控制部分
耦合器润滑油过滤器出口压力大于0.27MPa,勺管位置小于5%,耦合器润滑油泵运行,耦合器准备就绪均为乙烯机的允许启动条件。
来自耦合器PLC 的通用跳闸信号参与乙烯机停机联锁。
耦合器输入轴振动过大二取二,耦合器输出轴振动过大二取二,耦合器壳振动过大二取二,耦合器轴位移过大二取二参与乙烯机停机联锁。
耦合器油箱加热器启动联锁,耦合器油箱加热器关闭联锁,手动启动耦合器润滑油泵允许条件联锁,耦合器辅助油泵启动联锁,耦合器辅助油泵停止联锁,耦合器倒转联锁,耦合器倒转报警均在CCS 系统控制。
耦合器油箱加热器启动联锁,当油箱液位高于48%,加热器温度正常,主电机运行信号自MCC 运行,手动启动软按钮确认,同时满足,则油箱加热器启动。
耦合器油箱加热器关闭联锁,当油箱液位低于48%,加热器温度过高,主电机运行信号自MCC 未运行,手动关闭软按钮确认,任意满足,则油箱加热器关闭。
手动启动耦合器润滑油泵允许条件联锁:耦合器径向轴承温度小于90℃,推力轴承温度小于90℃,滚动轴承温度小于95℃,液力变矩器出口温度小于110℃,润滑油冷却器出口温度小于50℃,壳振动小于8mm/s,轴振动小于53um,轴位移小于0.4mm,油箱液位小于6.8%,大于48%。
耦合器辅助油泵启动联锁:耦合器润滑油过滤器出口压力小于0.18MPa 与主电机运行同时满足,耦合器润滑油箱温度与耦合器电加热器运行同时满足,手动启动耦合器润滑油泵允许条件与冷却系统人工确认正常和手动启动耦合器润滑油泵软按钮同时满足,机组停机后有转速来自PLC 和耦合器输出转速大于10rpm 任意一个满足,与设备切换到停止状态同时满足,任意一组满足可启动耦合器辅助油泵。
当主电机启动完成与耦合器润滑油过滤器出口压力大于0.27MPa 同时满足后,延时180s 耦合器辅助油泵停止;当耦合器电加热器未运行,耦合器润滑油泵运行,耦合器润滑油箱温度小于7℃,自MCC 主电机信号未运行,耦合器辅助油泵未自启同时满足,耦合器辅助油泵停止;耦合器输出转速小于10rpm 与停机信号同时满足,去关闭勺管。惰转结束后,延时设定时间后辅助油泵停止,此时与耦合器润滑油泵未运行同时满足,则现场VCU 设备切换到停止状态,至耦合器倒转报警。通过MCC 主电机合闸信号后复位,耦合器输出转速大于10rpm 或自PLC 机组停机后有转速和设备切换到停止状态同时满足,耦合器也产生倒转报警。
油压建立到耦合器PLC:耦合器润滑油泵运行,润滑油冷却器出口温度大于12℃,耦合器润滑油过滤器出口压力大于0.27MPa 同时满足,和主电机启动完成满足条件,则建立油压。油压建立后,与来自耦合器的主电机准备启动准备就绪同时满足。
4 调试中的问题处理
问题1:项目期间,VCU 控制单元的硬件供电电源是菲尼克斯稳压电源,电源输入端由机柜间PDC 柜某一空开给出。上电投用前检查,稳压电源输出不正常,经检查发现柜间PDC 柜某一空开给出的是24VDC,导致稳压电源电压有问题。重新更换PDC 柜内另一220VAC 空开,作为稳压电源的输入,稳压电源的输出可调电压为24VDC,供电正常。
问题2:耦合器转速信号分为2 个轴输出转速和2 个中间转速,分别使用二选一逻辑,选择最安全转速信号经过PLC 后输出给CCS 系统。转速探头是德国Braun 转速探头A5S1DD4,耦合器启动之后其中一个输出转速无值显示。Braun 转速探头是由电磁传感器和安装在轴系上的齿盘组成,主轴转动带动齿盘旋转,齿牙通过传感器时引起电路磁阻变化,经过放大整形后形成一个方波电脉冲,通过记录脉冲个数得到转速值。第一步检查SE72 转速信号接线无问题,如转速接线图3 所示。

图3 转速接线图Fig.3 Speed wiring diagram
第二步用FLUKE754 信号发生器给频率信号,FLUKE754 开机后,选择按键SOURCE---Hz,Vpp 输入0v,选择sin 正弦波Done,给频率信号对应PLC 上对应0rpm ~9000rpm 转速正常;第三步将探头拆下,用磁铁感应,转速信号输入无变化;第四步拆除另一个转速探头,用磁铁感应,另一个转速信号显示有值。经判断转速探头有问题,交福伊特厂家更换。
问题3:在项目上,轴系仪表使用的是EMERSON CSI 6500 ATG 压缩机轴系仪表监控系统。该系统配套传感器电压输出范围为-2V ~-18V,使用的前置器型号均为EZ1000,接入CSI 6500 ATG 系统A6500-UM 通用测量卡(根据组态区分轴位移和轴振动通道),在施工时必须严格按照前置器上标注的传感器和延长电缆规格型号配套使用,注意前置器侧面标注的配套设备带有SN 码,如图3 该配套设备前置器型号为EZ1000,传感器型号为EZ1080,延长线型号为EZ1900,型号后标注出厂SN 码。振动和位移传感器的安装间隙电压均为-10V,回路测试前,传感器应全部安装完成并接入CCS 系统显示回路正常无故障。
在轴振动回路调试时,需将FLUKE754 串入前置器OUT 回路中,把前置器OUT 线拆下连接至FLUKE754 频率输出端负极,FLUKE754 频率输出端正极连接至前置器OUT 口,见图4。
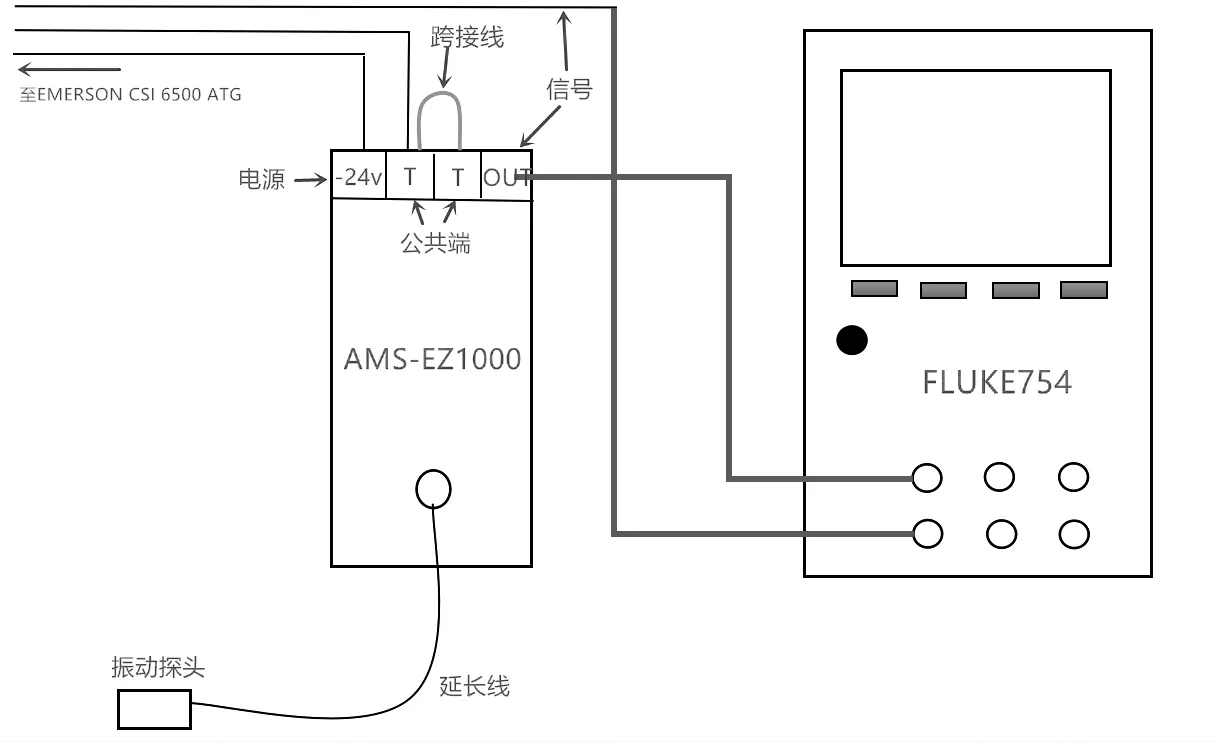
图4 FLUKE744与前置器连接示意图Fig.4 Schematic diagram of connection between FLUKE744 and proximitor
FLUKE754 开机后,选择按键SOURCE(Hz),Vpp 输入0V,选择sin 正弦波Done,频率输入200Hz,对同一个轴振动回路Vpp 振幅峰值和CCS 系统测量范围的对应关系反复测试3 次,求取算数平均值作为回路测试的标准值(忽略系统误差)。根据实测值得出Vpp 与um 之间基本呈线性关系,见表1。
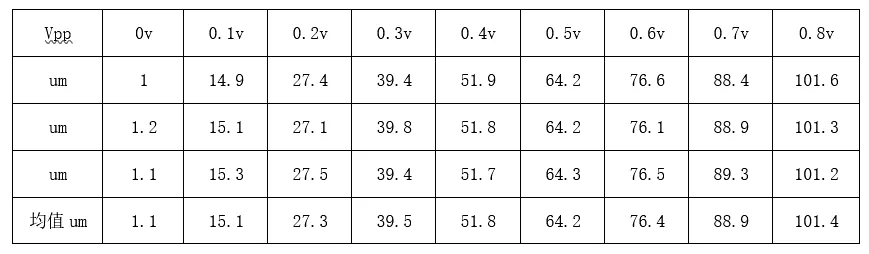
表1 Vpp与um之间测试值Table 1 Test values between Vpp and um
轴振动测量范围为0um ~100um,根据上述最大值之间的对应关系计算得出Vpp 为0.789V 时对应CCS 振动值为100um,以此为标准值对另一轴振动回路做了测试,数据见表2。轴振动传感器回路测试实测值:基本转速值200Hz,测量范围0um ~100um。

表2 轴振动传感器回路测试值Table 2 Test values of shaft vibration sensor circuit
5 结束语
液力耦合器采用VOITH 公司的增速型液力耦合器,能量调节通过调速液力偶合器无磨损地从传动机器向被驱动机器传送动力。现场PLC 为VCU 控制部分,为RWC M Vorecon 执行启动和速度控制。VCU 还控制Vorecon 部件,如液力联轴器(启动联轴器)和变矩器。从现场Vorecon至VCU 控制器PLC,从VCU 控制器至CCS 控制,通过勺管调节泵轮涡轮中的油位来调节输出轴转速,从而实现节能目的。
猜你喜欢
水泵技术(2021年5期)2021-12-31
江苏安全生产(2021年5期)2021-07-16
石油钻探技术(2020年3期)2020-08-24
——变矩器的锁止控制
汽车与驾驶维修(维修版)(2019年9期)2019-10-14
汽车零部件(2016年10期)2016-12-06
设备管理与维修(2016年7期)2016-04-23
汽车实用技术(2015年8期)2015-12-26
新疆钢铁(2015年3期)2015-11-08
汽车维修与保养(2015年12期)2015-04-18
汽车科技(2015年1期)2015-02-28