
微创腔镜手术吻合器的发展现状及应用综述
2023-10-20 05:53鲁兰星林书婷
医疗卫生装备 2023年8期
鲁兰星,林书婷,李 华
(四川大学机械工程学院,成都 610065)
0 引言
外科手术可以通过对人体内病变组织进行切割以及缝合等完成治疗。传统外科手术通过切开较大的创口以充分暴露需要进行手术的部位,医生通过手术刀及针线等对组织进行手动切除及缝合等,这类手术的视野宽阔、清晰,效果良好,但易留下疤痕、恢复时间长且易导致术后感染等并发症,另外,大量的缝合工作需要花费较多的时间和精力,并且对医生的技术要求较高。1908 年,外科吻合器的概念被首次提出并完成了开放式吻合器的设计[1],通过器械缝合代替外科手术中的手动缝合,显著提高了缝合效率和缝合质量,减轻了医生的手术压力;1981 年,美国强生公司研发出手动腔镜吻合器并应用于微创外科手术,随着微创外科手术技术飞速发展,微创腔镜手术吻合器被不断完善、创新[1];2010 年,美国食品药品监督管理局(Food and Drug Administration,FDA)批准柯惠公司推出了第一款电动腔镜吻合器[2],随后,电动腔镜吻合器广泛应用于各种微创外科手术。自微创腔镜手术吻合器被研发后,采用微创腔镜手术吻合器进行微创外科手术逐步替代传统外科手术,与传统外科手术相比,微创外科手术具有创口小、痛苦少、恢复快且感染率低等优点[3],但手部抖动以及器械故障等不可控因素会影响手术质量[4]。
微创腔镜手术吻合器自20 世纪80 年代初逐渐发展,到目前形成了大量多功能、高性能的产品,已广泛应用于各种外科手术并具有良好的手术效果。其工作原理为微创腔镜手术吻合器的执行器通过2~3 cm 的小孔进入体内,医生通过体外的操作装置完成对组织的夹持、吻合以及切割等。微创腔镜手术吻合器的性能与手术效果、手术时间、术中及术后出血量和相关并发症等有密切的关系,因此对于微创腔镜手术吻合器的安全性以及操作性要求较高,而1 cm 左右的杆身直径使得其制造难度加大,设计出更加安全、高效的微创腔镜手术吻合器是学者以及医疗机构长期追求的目标。本文将微创腔镜手术吻合器分为磁性、手动及电动3 个类别,对微创腔镜手术吻合器的发展现状进行综述,总结其应用效果及优缺点,并指出未来的发展方向,以期为国内微创腔镜手术吻合器的发展提供参考。
1 微创腔镜手术吻合器国内外发展现状
1.1 国外发展现状
国外微创腔镜手术吻合器发展较早,在应用于微创手术的磁性吻合器以及手动/电动微创腔镜手术吻合器模块化、电动化、智能化等方面进行了较为深入的研究。目前,对于磁吻合器,各国均有相关研究。国外对于磁吻合器的材料及结构等方面进行了较为深入的研究,且目前对于自组装磁吻合器的研究较多,同时,通过大量动物实验证明了微创技术与磁吻合技术结合的巨大发展前景;对于手动/电动微创腔镜手术吻合器,美国的相关研究处于领先水平,在缝合钉成型、实时反馈、对不同类型及厚度组织的适配性、执行器的灵活性和运动范围、组织传感等方面均做出了技术性突破[5-17]。
1.1.1 微创腔镜手术磁吻合器
通过磁性压迫吻合技术进行“无钉”和“无缝线”的吻合在20 世纪70 年代被提出,经过几十年的发展,完成了将微创腔镜技术与磁吻合技术相结合以及对自组装磁吻合器的研发,但还需要更多的临床研究[5-9]。
1978 年,Obora 等[5]首次提出利用磁力进行无缝线血管吻合,并通过动物实验进行了相关研究分析,实验结果证明磁吻合技术简便、快速且可靠性高,具有良好的发展前景。2009 年,Jamidar 等[6]研发了一种新型磁吻合器,采用铰链式金属塑料制成,可以根据胆道形态进行自适应折叠,有利于吻合口完成重建后磁吻合器的排除,但对于人体的可行性还需进一步深入研究。2014 年,Diana 等[7]设计了由一组2 条柔性磁性元件链组成的模块化柔性磁吻合装置,并通过动物实验进行了微创消化道吻合手术,效率较高且成本较低,证明了该吻合装置具有巨大的发展前景,但还需进一步研究和改进,以确定最佳磁力和最适合的输送系统。2016 年,Ryou 等[8]研发了自组装磁吻合器,“智能”磁铁通过内窥镜传送并自组装成能够创建大口径吻合的预定配置,实验证明其具有良好的吻合效果,但还需更多的人体研究进行进一步验证。2022 年,Ore 等[9]使用自成型磁体吻合装置进行了动物小肠吻合实验,该装置外形为正八边形,外径为25 mm,通过环形磁铁组件耦合以形成压缩吻合,与缝合或钉合吻合相比,采用该吻合装置进行手术的炎症、疤痕、变形和壁增厚更少,但缺乏临床应用研究,尚未发展成熟。
微创腔镜手术磁吻合器具有操作简单、迅速、可靠的特点,广泛应用于动物实验中的胃肠吻合、胆肠吻合及血管吻合等,但微创腔镜手术磁吻合器的研究依然处于探索阶段,还需在吻合机制、结构优化及临床应用等方面进行更深入的研究。
1.1.2 手动微创腔镜手术吻合器
手动微创腔镜手术吻合器采用纯机械结构组成,手动完成执行器的弯转、旋转、夹持、吻合以及切割等操作,国外以Endo GIA 系列吻合器为代表,在可靠性、安全性及手术效率等方面表现良好。
美国强生旗下的爱惜康于2007 年推出了ENDOPATH 吻合器[10][如图1(a)所示],其增强的全系统压缩功能有助于完成更好的吻合钉成型,可适应不同类型的组织,同时可以更好地防漏和止血,在较厚的组织中进行吻合时具备优势,但手动操作对末端执行器的稳定性影响较大,操作装置复杂且易发生机械故障。另外,该公司还研发了具有表面抓握技术的钉匣以及钉线加固技术,表面抓握技术可以使得对组织的夹持更加可靠,根据不同组织厚度可以选择相对应的钉匣高度,带表面抓握技术的执行器可在最广泛的组织厚度范围内提供卓越的吻合钉线完整性。钉线加固技术在手术期间提供额外的保护层,易于应用,可提高手术效率,确保吻合钉线可靠。美敦力于2012 年推出了Endo GIA 通用吻合器和Endo GIA Ultra 通用吻合器[11][如图1(b)和(c)所示]。Endo GIA 可进行2 个方位各45°的弯转;Endo GIA Ultra 新增三排不等高吻合钉吻合(Tri-Staple)技术,在吻合质量和效率上有了进一步提高,但两者仍采用手动操作。

图1 国外手动微创腔镜手术吻合器
手动微创腔镜手术吻合器通过手动控制执行器末端对组织的各项操作,具有稳定性低、吻合质量差、部件易脱落等缺点。随着医疗器械的发展和各项技术的创新及应用,更加智能、应用范围更广的电动腔镜吻合器不断被研发。
1.1.3 电动微创腔镜手术吻合器
电动微创腔镜手术吻合器以电动驱动为主,同时搭载各种高新技术以提升吻合器性能,国外以EndoWrist 吻合器为代表,在可靠性、安全性、智能化及电动化程度等方面表现良好。
直觉外科早期推出了极具代表性的EndoWrist吻合器[12][如图2(a)所示],该吻合器通过OS4 软件进行持续监测和实时反馈,可定位重要组织并轻松进入狭窄、深邃的空间;其采用智能夹紧(SmartClamp)技术可实时反馈夹紧完成的百分比,确保处于最佳夹持状态时进行吻合;另外,其执行器可进行左右各54°、上下各27°的弯转,运动范围大,可操作性强。EndoWrist 的吻合可靠性、手术质量以及智能化程度等在当时处于领先水平,但只能配合达芬奇手术机器人系统使用,手术费用高昂,导致其普及化程度较低。2015 年,爱惜康推出了电动血管吻合器[13][如图2(b)所示],该吻合器的杆身直径为9 mm 和12 mm 2种,更细的杆身在狭窄的环境中运行空间更大,例如在肋骨间的枢转范围更大,增加了尖端的可操作性,可减少胸壁创伤率[14]。另外,其执行器的宽度从9.6 mm减小到7.0 mm,夹持和挑拉组织时更方便,同时减少了解剖量和组织损伤[15],而且执行器可进行左、右2 个方位各50°的弯转,灵活性更高且运动范围更大。美敦力于2017 年推出了Signia 智能吻合器[16][如图2(c)所示],集高性能芯片、微处理器以及传感器于一体,采用组织传感技术,可通过OLED 屏幕实时反馈施加在组织上的力,并根据组织厚度调整击发速度以优化吻合线的形成。此外,该吻合器还搭载Tri-Staple 技术,通过阶梯式高度的吻合钉分级压缩组织,提高了吻合线质量,减少了出血、渗血等并发症的发生。研究发现,市面上其他微创腔镜手术吻合器的吻合钉畸形率为19.7%左右,而Signia 仅为2.8%[16]。2018 年,直觉外科推出了SureForm 吻合器[17][如图2(d)所示],其执行器在上、下、左、右都可进行0°~60°的弯转,运动范围更大,可操作性更强。该吻合器搭载SmartFire 技术,可对组织的压缩程度进行每秒超1 000 次的监测并自动调整击发过程,从而自适应不同厚度的组织以提高吻合线质量,同时在吻合切割过程中停顿两次以缓冲阻力,避免强行切割造成组织撕裂等损伤。实验表明,SureForm 在较厚组织中的最佳吻合钉成型率可达98.7%,尖端移动量比其他微创腔镜手术吻合器减少了75%[17]。另外,其较长的切割吻合线长度可以减少使用的钉匣数量,降低手术成本。

图2 国外电动微创腔镜手术吻合器
电动微创腔镜手术吻合器具有更高的运动精度和良好的操作性能,减少了并发症的发生,提高了手术效率,最大程度地减少了由操作者手部的颤抖而引起的末端执行器抖动,具有较高的稳定性。另外,更大的弯转范围使得电动微创腔镜手术吻合器可以更好地接近组织原本所处的位置,从而避免对组织进行拉扯,并在定位和夹持过程中减小对目标组织的张力以及对周围组织的应力。但电动微创腔镜手术吻合器的制造难度更大、成本更高,仅在许多大型医院投入使用,且术前需要对医生进行系统的培训以充分掌握其使用方法。
1.2 国内发展现状
国内微创腔镜手术吻合器发展较晚,但也取得了一定的研究成果。对于微创腔镜手术磁吻合器,西安交通大学先后进行了产品研发、动物实验及临床应用研究;对于手动/电动微创腔镜手术吻合器,国内产品已能够满足大部分手术需求,在可靠性及安全性等方面与国外产品持平且手术成本更低,但在电动化程度、智能化程度以及操作性能等方面较国外仍存在一定的差距。
1.2.1 微创腔镜手术磁吻合器
国内对于微创腔镜手术磁吻合器的研发较晚,但在吻合器材料及结构设计等方面进行了深入研究并取得了相应成果,对于产品制造及临床试验等还需进一步研究。
2008 年,西安交通大学[18-19]研发了新型无缝线磁性胆肠吻合支架并进行了动物实验,该吻合装置采用钕铁硼磁吻合方式,结构简单、吻合迅速,术后观察无吻合口出血和感染等并发症,但关于该吻合装置在人体中的长期性能还需进一步研究。2014年,刘亚雄等[20-21]发明了一款组合式可降解磁吻合器,该吻合器可搭载药物,在手术完成后的一段时间内可降解并排除体外。2019 年,西安交通大学将设计的磁吻合器应用于患者腹腔镜下的胆-肠吻合,近1 年的随访过程中无相关并发症发生,吻合效果良好[22]。2022 年,陈环等[23]研发了自组装径向充磁吻合器,该吻合器由子环、母环和“J”形管组成,已通过有限元分析和大鼠胃肠吻合实验验证了该吻合器的可行性和有效性。同年,张洪科等[24]设计了一种腹腔镜胆肠磁吻合器,将磁吻合技术和机械控制技术相结合,提高了磁吻合技术的可靠性,而且操作简单,但尚未进行产品设计及实验。
国内对于微创腔镜手术磁吻合器的研究较为深入,但临床应用极少,其进一步研究对于微创外科手术的发展具有重要意义。
1.2.2 手动微创腔镜手术吻合器
国内对于手动微创腔镜手术吻合器的研究较多,手动微创腔镜手术吻合器的性能水平已逐步与国外持平,可单手操作、安全性能良好且成本与国外相比较更低。
上海逸思在2014 年研发了easyEndo 腔镜直线型切割吻合器[25][如图3(a)所示],该吻合器采用全机械式结构,由驱动机构、自动复位机构以及保险机构组成[26],误击发概率低[27],可单手操作、反复夹持[28],但执行部件中的复位扭簧回弹时可能会损伤周围组织。2016 年,上海逸思继续推出了手动操作的通用腔镜切割吻合器[29][如图3(b)所示],该吻合器采用模块化设计,结构简单、便于拆卸[30],传动稳定可靠[31],左、右2 个方位的弯转角度最大达60°,可在特定角度锁定,受到外力时能够保持稳定[32],但弯转角度受限,灵活性较低。2018 年,天津瑞奇推出第三代一次性使用腔镜直线切割吻合器[33][如图3(c)所示],实现了双手柄击发和无极弯转,是首款国内自主研发实现自由实施(free-to-operation,FTO)的腔镜直线切割吻合器产品。2022 年,向炀等[34]研发了一款新型血管吻合器[如图3(d)所示],通过非永久性止逆锁的卡扣结构完成对血管的吻合,并进行了体外实验,可快速实现血管的端端吻合以及功能重建,但还需要进行结构优化与临床试验。

图3 国内手动微创腔镜手术吻合器
国内自主研发的手动微创腔镜手术吻合器已广泛应用于临床,且手术效果与国外的手动微创腔镜手术吻合器相当,但依然存在手动微创腔镜手术吻合器所具有的普遍缺点。
1.2.3 电动微创腔镜手术吻合器
国内对于电动微创腔镜手术吻合器正进行更为深入的研究,已实现微创腔镜手术吻合器电动化,但在提升智能化程度方面还需进行更加深入的研究。
天津大学联合北京中法派尔特于2013 年研发了智能腔镜吻合器[35][如图4(a)所示],采用双重抓握技术(double gripping technology)以及组织压缩技术(better tissue compression)实现双重抓握以压紧组织,具有更好的推钉技术、止血功能和安全性能。2016年,李忻[36]提出了一款电动腔镜吻合器的设计方案及控制原理,并进行了仿真分析,但缺乏实验验证,还需进一步完善。北京中法派尔特在2017 年研发了一次性医用全电动腔镜吻合器[37][如图4(b)所示],该吻合器通过机械和电控模块的集成实现了电动弯转、夹持和切割,过程平稳且切割的组织边缘整齐平滑,实验结果表明吻合钉成型状态良好且基本无渗血现象,但还需进一步通过临床实验证明该吻合器的性能。2019 年,上海理工大学研发了一款新型电动吻合器[38][如图4(c)所示],执行器可进行左、右2 个方位各60°的弯转,吻合效果良好,实验表明其吻合钉畸形率低于1.14%,但仍存在自动化程度不足和吻合器弯转处刚度不足等缺点。天津瑞奇在2020 年推出了iReach 电动腔镜吻合器[33][如图4(d)所示],是国内首款完成中国食品药品监督管理局产品注册的电动型吻合器,该吻合器操作平稳、成本低,可连续弯转,集手动操作和电动操作于一体,在电量不足或系统故障时可进行手动操作,降低了手术过程中的风险[39],但内部结构复杂、制造装配难度较大且维护成本高。
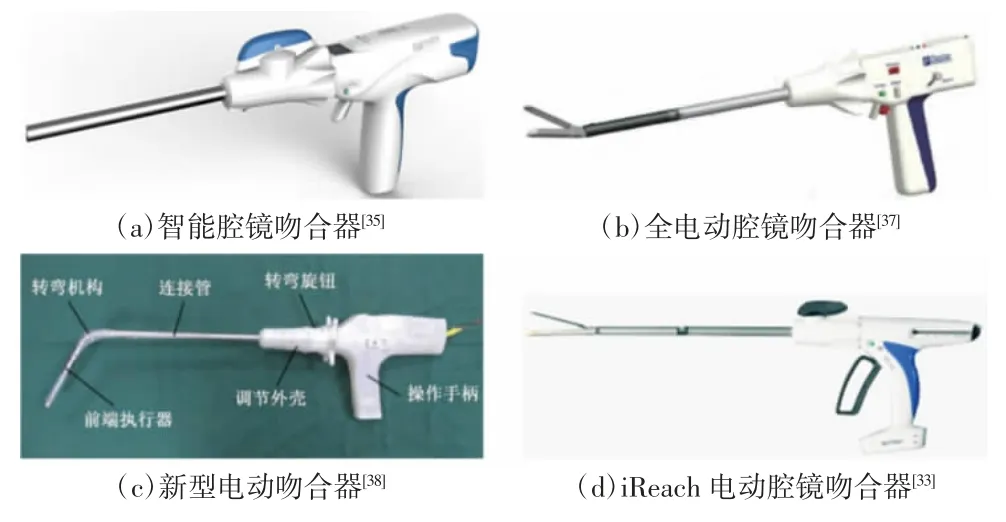
图4 国内电动微创腔镜手术吻合器
国内对于电动微创腔镜手术吻合器的研究已步入正轨,但还需进一步深入,提升其智能化程度并降低其成本。
2 微创腔镜手术吻合器的应用
微创腔镜手术吻合器的诞生及应用为外科医生和患者提供了很大便利,减少了手术时间的同时提高了吻合的可靠性。目前,微创腔镜手术吻合器已应用于胃切除、肥胖症治疗、肺动脉横断、肺叶切除、结直肠切除、间质妊娠等30 多种手术中。
2.1 微创腔镜手术吻合器在胃肠外科中的应用
微创腔镜手术吻合器在胃肠外科手术中的应用最早也最为成熟,在吻合效率、吻合质量、并发症发生率及组织损伤程度等方面具有显著的优势,另外,其平均出血量及死亡率普遍较低。
Champion 等[40]比较了使用Endo-GIA 吻合器与ETS-Flex 吻合器进行胃旁路手术的效果,发现Endo-GIA 吻合器所需要的成本较高,但可靠性及稳定性也更好;虽然ETS-Flex 吻合器成本较低,但出现的技术故障更多。随后,Man 等[41]比较分析了使用Endo GIA Ultra 与ENDOPATH 吻合器进行远端胃切除术的效果,发现使用Endo GIA Ultra 吻合器在失血量、术后引流留置期以及住院时间等方面都具有显著的优势。另外一项关于腹腔镜肥胖症治疗手术的研究结果发现,与Endo-GIA 吻合器和其他手动腔镜吻合器相比,使用电动血管吻合器PVS 的出血相关并发症发生率降低了47%[42]。由此可见,美敦力公司早期推出的Endo GIA 系列吻合器具有较为优越的性能,其新增的Tri-Staple 技术为微创腔镜手术吻合器性能的提升做出了重大贡献,但与爱惜康公司后来推出的PVS 相比,其优势显著降低。
关于直觉外科推出的EndoWrist 吻合器相关临床应用较多,Holzmacher 等[43]对使用EndoWrist 与其他微创腔镜手术吻合器进行结直肠手术进行了比较,两者在失血量、手术时间、住院时间及并发症发生率等方面没有显著差异,但使用EndoWrist 的末端执行器运动范围更大、击发次数更少、成本更低。Hagen等[44]分析比较了EndoWrist 吻合器和ENDOPATH 吻合器用于胃旁路手术的手术效果及成本,发现使用ENDOPATH 吻合器的手术中无并发症产生,手术状况良好;另外,当击发次数较少(<4)时,使用Endo Wrist吻合器的手术成本更低,当击发次数较多(>4)时,使用ENDOPATH 吻合器的手术成本更低。Johnson 等[45]通过对历史数据进行研究,证明了EndoWrist 吻合器用于结肠切除和体内吻合效果良好。Simone 等[46]则对比了使用EndoWrist 吻合器与其他微创腔镜手术吻合器配合达芬奇手术机器人系统进行前直肠癌切除术的情况,发现EndoWrise 吻合器具有良好的手术效果,特别是对于肥胖患者和手术区域受限的男性患者等,EndoWrist 吻合器简化了横断过程进而减少了直肠切除期间的平均击发次数,同时减少了吻合口瘘的发生。可以确定的是,EndoWrist 吻合器在胃肠外科中的应用效果普遍良好,且搭配手术机器人系统可以发挥出更好的手术效果。
Rawlins 等[47]对比了使用Signia 吻合器与ENDOPATH 吻合器进行袖状胃切除术的效果,发现使用Signia 吻合器的并发症发生率较高,但成本较低,因此,对于Signia 吻合器在胃肠外科中的应用效果还需进一步验证。关于国产微创腔镜手术吻合器,张志平等[48]总结对比了使用国产逸思微创腔镜手术吻合器与进口微创腔镜手术吻合器进行全腹腔镜胃癌根治术的安全性及成本,发现国产逸思微创腔镜手术吻合器在全腹腔镜胃癌根治术中的手术效果与进口微创腔镜手术吻合器相当,且成本远低于进口微创腔镜手术吻合器。林少泽等[49]分别采用国产瑞奇微创腔镜手术吻合器、进口强生微创腔镜手术吻合器以及进口柯惠微创腔镜手术吻合器对96 例患者进行直肠癌根治术,发现3 组手术的安全性及可行性基本一致,但国产瑞奇微创腔镜手术吻合器的手术成本更低。国内微创腔镜手术吻合器在胃肠外科中的手术效果与国外微创腔镜手术吻合器相当,且成本更低,但在临床应用方面的数据总结分析较少,应用范围较小。
2.2 微创腔镜手术吻合器在心胸外科中的应用
1992 年,美国首次开展了胸腔镜肺叶切除手术[50],由于胸部肋骨的阻挡,心胸外科手术所需的技术要求更高且风险更大,因此对微创腔镜手术吻合器的要求极为严苛。对于难度较高的胸腔镜手术,使用Signia 吻合器和PVS 等电动微创腔镜手术吻合器效果更好。
Shimada 等[51]对比了使用Signia 吻合器与其他微创腔镜手术吻合器进行胸腔镜亚肺叶切除术的手术情况,发现使用Signia 吻合器的出血量、手术时长、吻合器以及各种规格钉匣的使用数量均比其他微创腔镜手术吻合器低,操作方便且可以节省手术时间,对于较少端口的手术具有良好的效果。Tsunezuka 等[52]总结了使用不同微创腔镜手术吻合器进行肺动脉横断手术的情况,发现使用PVS 的出血率为0,无肺动脉膜破裂发生,表明使用PVS 进行肺动脉吻合有助于防止组织损伤和术中出血;另外,证明了执行器闭合间隙会对血管壁组织损伤有影响,进而论证了PVS 对于肺动脉横断具有良好的手术效果。Park等[53]对比了使用PVS 与ENDOPATH 吻合器搭载具有表面抓握技术的钉匣进行胸腔镜肺叶切除术的效果,发现使用PVS 可减少出血量、手术时间及手术成本。综上所述,在胸心外科手术中采用电动腔镜吻合器具有更好的手术效果,而PVS 具备更为明显的优势。
2.3 微创腔镜手术吻合器在泌尿外科中的应用
微创腔镜手术吻合器在泌尿外科领域主要应用于膀胱切除术以及血管吻合,采用Endo GIA 吻合器可以减少术中及术后失血量及手术时间。
Neulander[54]总结了使用Endo GIA 吻合器在根治性膀胱切除术中进行阴道外侧解剖的手术情况,发现总体效果良好,证明了Endo GIA 吻合器可用于在女性患者的根治性膀胱切除术中执行对技术要求较高的横向阴道解剖。通过与常规方法比较,Hanash等[55]总结了在根治性膀胱切除术中使用Endo-GIA吻合器控制血管蒂的外科技术经验,发现使用该吻合器的术中和术后失血量显著减少且手术时间更短。虽然Endo-GIA 系列吻合器在泌尿外科中应用效果良好,但缺乏与其他微创腔镜手术吻合器的对比。
2.4 微创腔镜手术吻合器在其他手术中的应用
随着微创腔镜手术吻合器技术的不断发展,其应用已逐渐延伸到了胆胰脾外科、血管外科以及妇产科等领域,且在腹腔镜宫角切除术中用于治疗间质性妊娠具有良好的效果。
Endo GIA 通用吻合器已安全用于腹腔镜宫角切除术治疗间质性妊娠[56],可以保护子宫的完整性,且显著减少了出血量及术后发病率。Yoong 等[57]描述了使用Endo GIA 吻合器对间质性妊娠进行腹腔镜宫角切除术的系列病例,采用该吻合器同时吻合和横切组织,最大限度地减少了对腹腔镜体内吻合的需求,表明该吻合器在间质性妊娠破裂的情况下使用效果良好。通过动物实验可以验证微创腔镜手术吻合器的安全性及可靠性,Nakayama 等[58]使用ENDOPATH吻合器对新鲜的猪胃进行了对比模拟实验,以验证微创腔镜手术吻合器的预压缩时间对吻合钉线的成型影响,发现当微创腔镜手术吻合器用于具有挑战性的组织时,合适的预压缩时间可以提高吻合线的质量。微创腔镜手术吻合器的应用范围广,但对于不同微创腔镜手术吻合器在临床应用中的相关数据缺乏总结,因此对于不同微创腔镜手术吻合器在其他手术中的优势与不足还需进一步研究。
2.5 微创腔镜手术吻合器应用效果讨论
微创外科手术的效果不仅与微创腔镜手术吻合器有关,同时受手术类型、手术位置等诸多因素的影响。国内外对于不同微创腔镜手术吻合器在不同手术中的应用均有相关研究,但国内相对较少。不同微创腔镜手术吻合器应用于不同手术中的死亡率、并发症发生率以及平均出血量等相关参数见表1。

表1 不同微创腔镜手术吻合器在不同手术中的效果
与手动微创腔镜手术吻合器相比,电动微创腔镜手术吻合器在手术成本、住院时间以及并发症发生率等方面具有明显的优势[2],通过使用电动微创腔镜手术吻合器、采用预压缩技术[60]以及进行术前培训[61]等手段可以减少相关并发症的发生,提升手术效果,但器械故障依然存在于各类手术中。Giffen 等[62]调查了225 例使用EndoWrist 吻合器与SureForm 吻合器在手术中导致并发症的故障类型,主要包括误击发、吻合钉线成型失败、卡住、吻合钉畸形、部件损坏或脱落、切割失败等[63-64],而器械故障会导致出血、吻合口瘘、术后感染等并发症,严重时会导致较高的发病率甚至死亡,微创腔镜手术吻合器故障发生率多为1%~2%[65]。Gopal 等[66]则总结了383 例使用微创腔镜手术吻合器出现并发症的病例,其中,误击发和卡住是导致并发症的主要原因。
3 微创腔镜手术吻合器存在的不足与发展展望
微创腔镜手术吻合器的不断发展创新为外科医生和患者带来了很多便利,节约了手术时间,减轻了患者的痛苦,但器械故障或操作失误等事故仍时有发生,微创腔镜手术吻合器依然存在不足。
(1)执行器闭合高度不能自适应组织厚度。微创腔镜手术吻合器对组织进行夹持后的闭合间隙会影响吻合效果,间隙过小会损伤血管壁导致出血,间隙过大会导致吻合钉畸形。Offodile 等[67]提出,合适的微创腔镜手术吻合器和钉匣选择以及正确使用是获得最佳手术效果的必要条件。微创腔镜手术吻合器的夹持驱动部件通常采用工字梁结构,当夹持组织较厚时可提供压缩力、较薄时提供支撑力,从而保持执行器闭合高度一致,确保吻合效果[68],但固定的闭合高度通常只能满足一定范围内厚度的组织,在组织厚度过大或过小时吻合器的吻合效果不理想。因此,在微创腔镜手术吻合器中,吻合后的执行器闭合高度应随组织厚度变化而改变。
(2)执行器运动范围有限。执行器的弯转角度与杆身直径是影响灵活性和运动范围的重要因素,通常左、右2 个方位各能弯转45°,但更多的方位和更大的角度使得执行器可应用于位置复杂或空间不足的手术,同时更接近组织原来的位置,减少拉扯以减小对目标组织的张力和对周围组织的应力,但执行器对组织的夹紧力可能会降低。在满足夹持力的前提下尽可能增大执行器的运动范围可使微创腔镜手术吻合器应用于更多种类、更加复杂的手术中。
(3)吻合钉成型后的高度对不同组织的适应性较低。以前普遍认为吻合钉成型后的钉高越低对组织的吻合更紧,吻合效果更好,但近年来的研究表明,过低的成型钉高会导致组织损坏甚至出血,因此合适的成型钉高是影响手术效果的重要因素[69]。使吻合钉成型后的高度可以自适应不同类厚度的组织可以显著提升吻合器的吻合效果。
(4)智能化程度较低。目前市面上的微创腔镜手术吻合器的智能化程度并不高,缺乏手术过程中的力反馈、视觉反馈、组织厚度反馈以及吻合切割过程反馈等信息。将机器人手术系统与微创腔镜手术吻合器相结合[70],与机器人手术系统所具有的力感知、增强现实、半自主手术及机器学习等技术充分融合[4],可弥补微创腔镜手术吻合器的不足,提高手术的安全性和可靠性。另外,提升微创腔镜手术吻合器自身的智能化程度对于手术质量的提升、医生操作难度的降低以及患者痛苦的减少具有重大意义。
(5)进口微创腔镜手术吻合器价格昂贵且基本处于垄断地位。由于国外微创腔镜手术吻合器发展较早,具备比较齐全的功能以及良好的性能,在我国所占市场份额较大,但在相同手术效果的前提下,使用国产微创腔镜手术吻合器的成本远低于进口吻合器。我国应大力提倡患者选用国产微创腔镜手术吻合器进行治疗并普及国产微创腔镜手术吻合器的治疗效果,同时提升对于微创腔镜手术吻合器的自主研发能力,加快研发出多功能、高性能、智能化、价格合理的微创腔镜手术吻合器。
4 结语
微创腔镜手术吻合器的发明减少了患者的痛苦、方便了医生的操作,但吻合口瘘、渗血、术后出血等依然是常见并发症,微创腔镜手术吻合器在手术中依然存在一定程度的故障发生率,提高微创腔镜手术吻合器的性能对于手术质量的提升具有重大意义。未来,微创腔镜手术吻合器将朝着全电动化、智能化、模块化及可靠度更高的方向不断发展。
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09
昆明医科大学学报(2020年11期)2020-12-28
中华养生保健(2020年3期)2020-11-16
中国医疗器械信息(2020年3期)2020-01-18
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
腹腔镜外科杂志(2016年9期)2016-06-01
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
中国医疗器械杂志(2015年5期)2015-12-31
