融合多传感器数据的空气细颗粒物自动监测技术优化
2023-10-20 11:30王璐
粘接 2023年10期
王 璐
(儋州市环境监测站,海南 儋州 571700)
由于空气细颗粒物对人体的伤害是持久的,需要实时监测空气细颗粒物的变化,为了达到这一目的,每个国家都根据自己国家的具体情况制定了不同的颗粒物监测仪器和相关技术[1-3]。发达国家的工业自动化相关研究比较早,在空气细颗粒物的监测上,使用的监测仪器比较成熟,在一些公共场所已经应用了很多成熟的监测仪器,并取得了不错的成果[4]。国内在颗粒物监测方面的研究比较晚,直到20世纪90年代才开始实施一些空气质量监测方案,虽然起步比较晚,但也研究了一些成熟的监测设备和技术,在实际应用上有一定的效果[5]。比如基于激光雷达的监测方法,利用车载激光雷达和移动走航监测技术实现多方位的颗粒物监测;或者是基于深度学习的监测方法,主要利用深度学习技术搭建监测模型,能够有效识别出空气细颗粒物污染水平[6-8]。在实际工作中,有很多类似的监测手段,但当监测数据类型越来越复杂,数据越来越多,监测数据异常愈加突出,一些常规监测技术的数据可信水平存在明显不足。因此,提出融合多传感器数据的空气细颗粒物自动监测技术,解决上述常规监测技术中存在的问题。
1 空气细颗粒物自动监测方法设计
1.1 采集空气细颗粒数据
在空气细颗粒物的监测上,使用灰尘传感器采集颗粒物浓度数据,整体采集过程需要的硬件有直流稳压电源、CC2530无线射频模块。其中灰尘传感器主要利用光的散射原理监测空气细颗粒物的质量浓度,在空气中的细颗粒物通过传感器的光敏区时,传感器中的二极管就会将接收到的散射光转换成电信号,经过AD转换后进入CC2530模块中,根据粉尘浓度和输出电压计算出颗粒物质量浓度[9-11]。
在实际监测过程中,往往会布置多个传感器采集空气细颗粒物数据,在处理上需要将所有监测节点纳入到同一网络中,这就需要利用网络协调器组建包含监测节点和通信节点的网络。具体组建过程如图1所示。
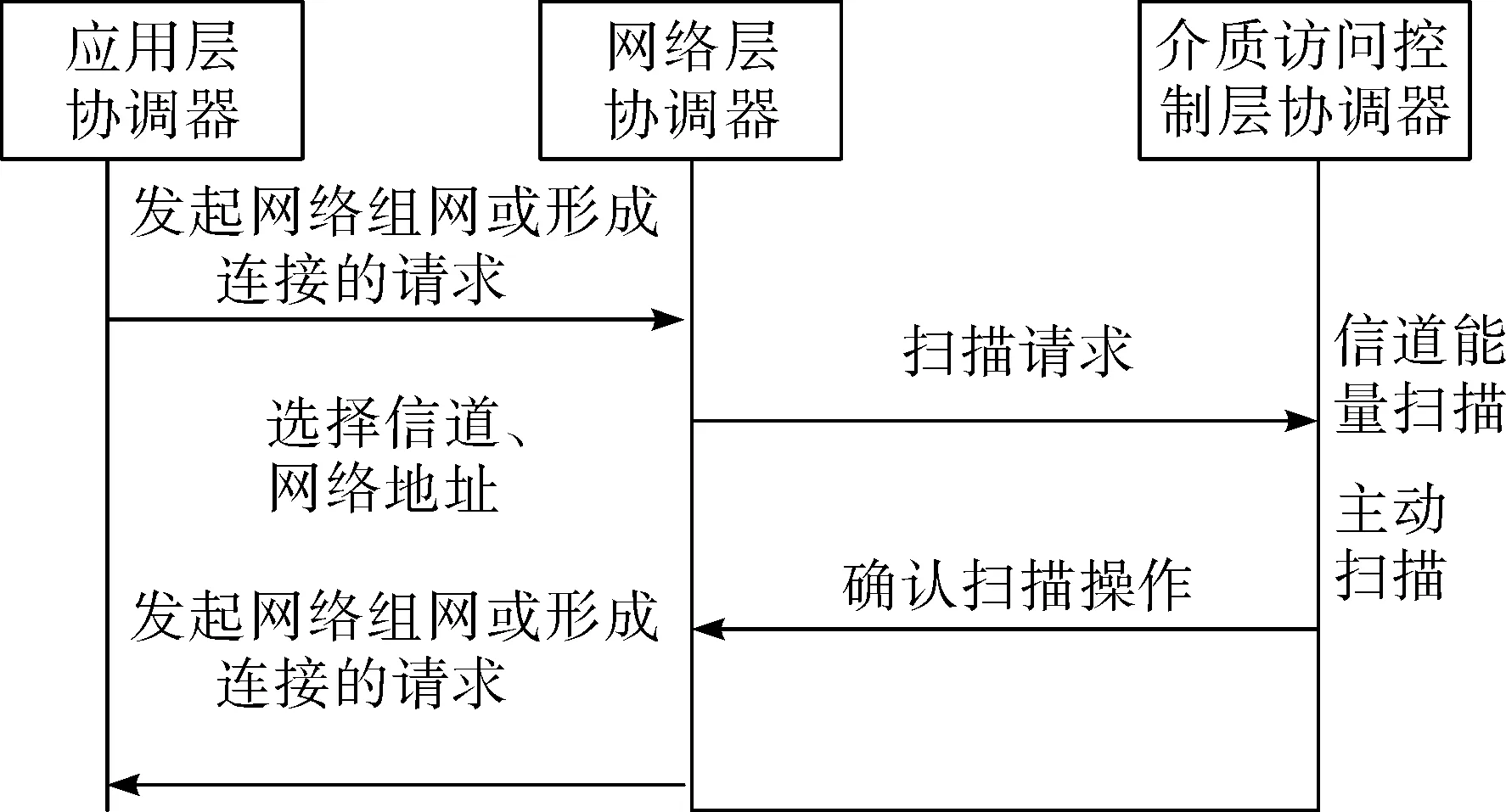
图1 协调器组网示意图
在网络组建完成后,根据监测区域和监测需求布置监测节点,将每个节点接入到组网内[12],以便后续对多源数据的处理。
1.2 融合多源监测数据
对每一个传感器采集到的监测数据进行向量处理,得到多维向量集,将其作为输入向量x∈X,经过融合处理后,得到输出量为y∈Y。根据贝叶斯定理,计算出向量集的后验概率,其表达式:
(1)
式中:k表示输出系数,P(Y=yk)表示先验概率分布。设x(n)为输入向量的第n个特征,获得条件概率分布:
将式(2)代入到式(1)中,得到:
(3)
式中:P(X=x|Y=yk)为监测数据的依赖目标函数;x(1)、x(2)为不同监测节点的传感器实际输出值,y表示融合后的输出值;P(X=x(1),x(2))为标准化因子。为了使传感器输出数据的可靠性达到最大,使其满足:
对于融合后的数据Y,采用以下公式描述传感器输出数据X中的误差信息。公式为:
(4)
对上述公式求解,得到:
(5)
式中:α表示方差。当2个传感器输出数据按照式(7)融合时,后验概率最大,数据精度最高,融合后的最终输出量y的方差为:
(6)
将同一时间内传感器监测数据的平均值记为xj(1),融合后的数据标准值为zj,利用这2项参数修正输出系数k:
(7)
将输出系数代回到上述公式,得到最终的监测数据,利用实时通信技术将监测数据传输到监测中心[13]。
1.3 监测数据实时通信
利用GPRS网络与CC2530控制器相连,利用GPRS网络逻辑结构实现监测数据的高速传输。在GPRS结构中划分出数据部分和无线部分,由数据部分提供监测数据的部分处理功能,包括数据包的拆封、信道的分配等;而无线部分则负责提供传输接口,以及 GPRS网络与外部网络之间的连接。在GPRS逻辑结构的支持下,实现空气细颗粒物的自动监测。
2 实验研究
在空气细颗粒物自动监测技术设计完成后,为了验证该检测技术的应用性能和监测数据的可信水平,以常规的几种监测技术作为参考,设计对比实验,根据实验结果分析提出的监测技术在空气细颗粒物自动监测上是否具有使用价值。
2.1 实验准备
在实验开始前,利用计算机进行模拟仿真实验,以某实验室作为实验区域,在实验区域内设置多个监测点,监测点的分布情况如图2所示。
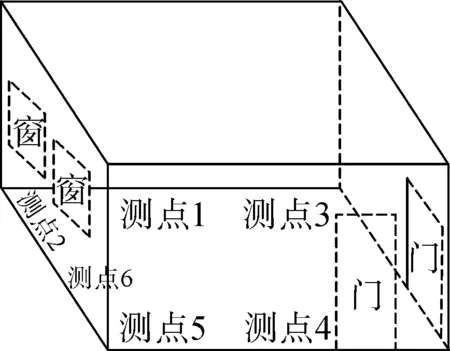
图2 监测点分布示意图
在实验中,为保证实验的公平公正,设置各个监测点采集数据的频率为每5 min一次,持续24 h,将这些数据作为原始数据,从原始数据中筛选出部分有代表性的数据进行后续实验分析;筛选后的实验数据如表1所示。
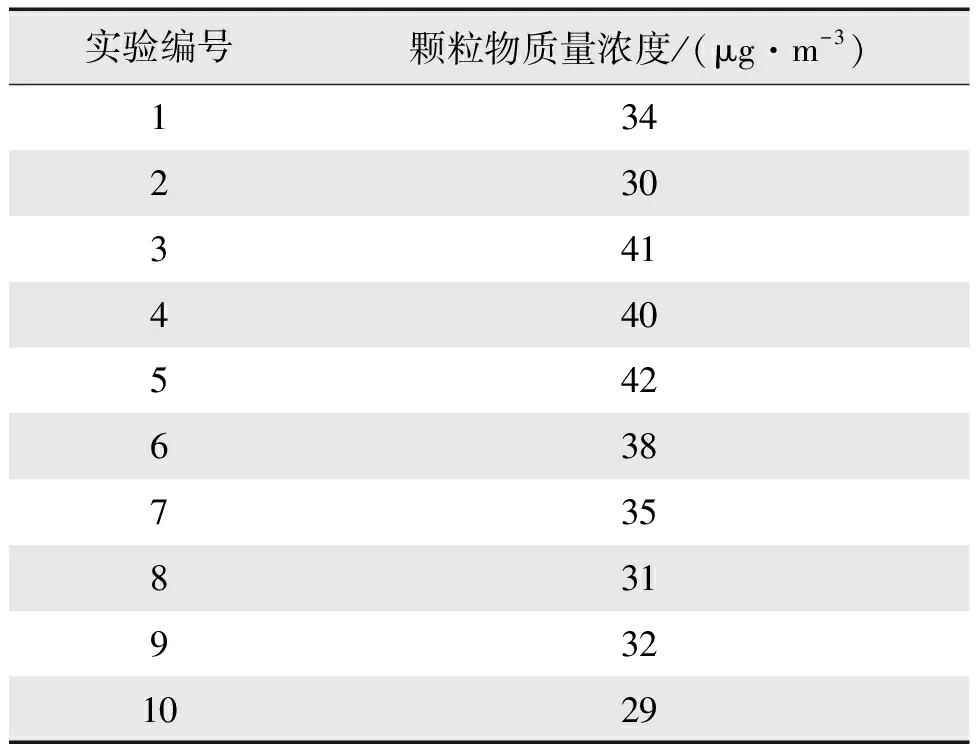
表1 实验数据表
将表1中的实验数据作为实验样本,用于后续监测数据误差实验分析,对于监测到的其他数据,打包处理后用于监测节点通信能力实验分析。通过这两组实验验证监测技术的数据可信水平,实验中选择的监测技术是应用比较多的基于激光雷达的监测技术以及基于深度学习的监测技术。
2.2 监测节点通信能力实验结果及分析
对监测节点通信能力的实验,首先设计2种实验环境:一种是有障碍的通信环境,选择室内实验室隔墙测试;一种是无障碍的通信环境,在室外空旷区域进行测试。利用串口助手分别在不同节点间距发送数据包,实验中共发送500个数据包,数据包发送串口号为COM7,波特率为115 200,含8个数据位和1个停止位,定时发送1 000 ms/次。数据发送完成后,统计出各个监测方法的接收信号强度和丢包率,实验结果如表2所示。
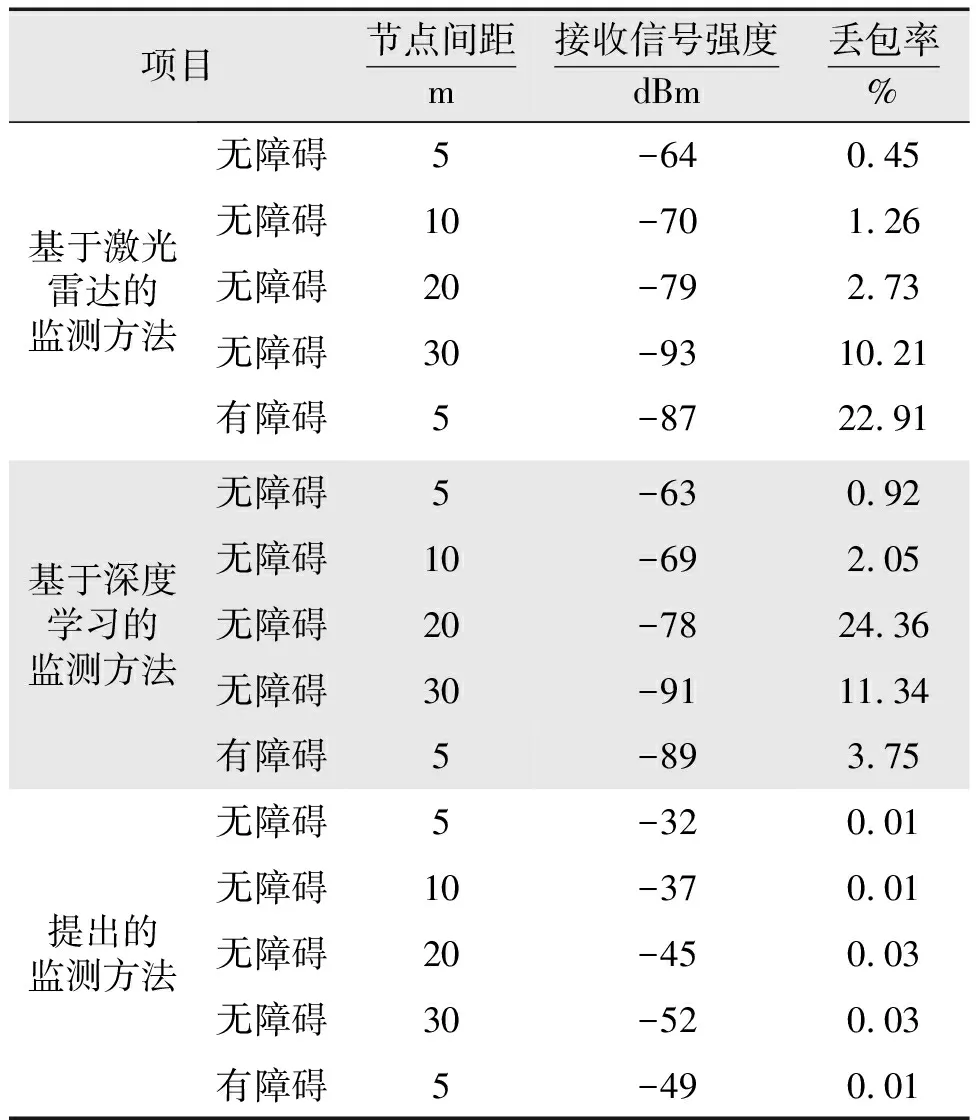
表2 监测节点通信能力实验结果
由表2可知,在无障碍实验环境下,随着监测节点间距的增加,各个监测方法接收信号强度逐渐变弱,丢包率逐渐变高。对比来看,提出的监测技术接收信号强度比较高,丢包率低,基本接近0;其他2组实验,在远距离通信时,接收信号强度比较差,丢包率比较高。在有障碍的实验环境下,基于激光雷达的监测方法和基于深度学习的监测方法接收信号强度非常低,数据丢包情况非常明显。
综上所述,提出的融合多传感器数据的监测方法监测节点通信能力更强,监测数据传输更可靠。
2.3 监测数据误差实验结果与分析
在监测数据误差实验分析中,以表中的监测数据作为实验样本,使用不同的监测技术在相同的实验环境下采集数据,将各个监测技术采集的监测数据与实验样本数据输入到MATLAB软件中,经过计算处理,获得各个监测数据的平均百分比误差结果和最大相对误差实验结果。综合2组实验结果共同分析监测技术的应用水平,实验结果如图3所示。
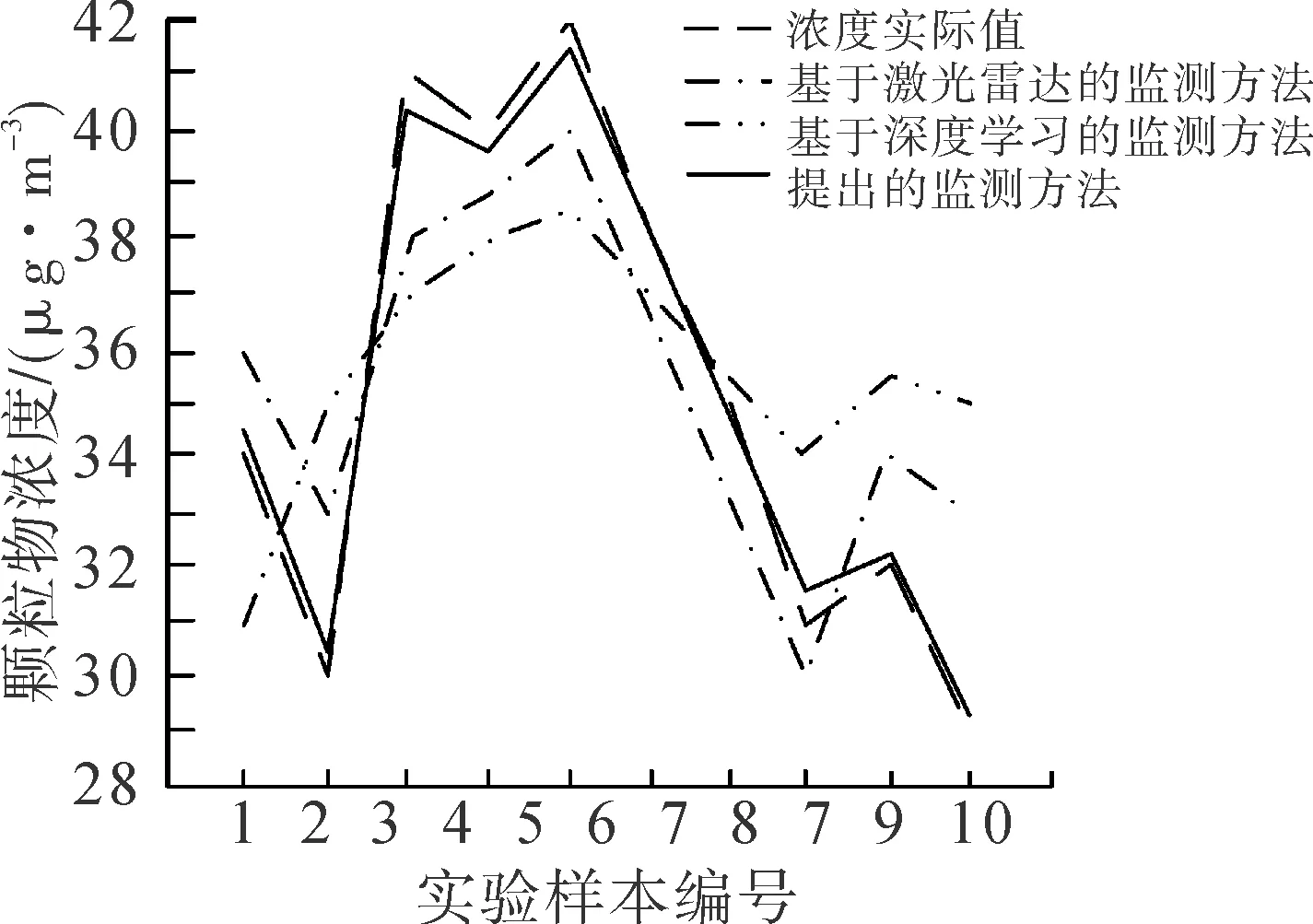
图3 各监测方法的监测数据误差
由图3可知,在有效的实验样本内,应用基于激光雷达的监测方法和基于深度学习的监测方法监测到的颗粒物质量浓度值与实际质量浓度值相差较大,2种方法的最大误差分别为4.0、6.1 μg/m3;而应用提出的监测方法监测到的颗粒物质量浓度值与实际值十分接近,最大误差为0.6 μg/m3。由此可知,提出的监测方法监测数据误差小,能更精准地监测空气细颗粒物质量浓度。结合监测节点通信能力实验结果分析可知,提出的融合多传感器数据的空气细颗粒物自动监测技术监测数据可信水平更高,整体性能优于常规的监测技术,具有一定的使用价值。
3 结语
本文以空气细颗粒物作为研究对象,针对常规监测方法中存在的不足,充分融合多传感器数据,优化监测流程和内容,设计了一种空气细颗粒物自动监测技术,实现了对空气细颗粒物的远程监测。设计了本实验方案,通过监测节点的测试和监测数据误差的分析,验证了该监测方法的有效性,证明了监测数据具有高水平的可信度。
猜你喜欢
冶金设备(2020年2期)2020-12-28
铁道通信信号(2019年11期)2019-05-21
铁道通信信号(2018年10期)2018-12-06
中国资源综合利用(2017年4期)2018-01-22
环境保护与循环经济(2017年2期)2017-09-26
制造技术与机床(2017年12期)2017-02-02
化工进展(2015年3期)2015-11-11
浙江大学学报(工学版)(2015年1期)2015-03-01
振动工程学报(2015年1期)2015-03-01
全球定位系统(2015年4期)2015-02-28