基于DODAF 作战视图的空地协同作战模型设计
2023-10-20 08:42杨茜
火力与指挥控制 2023年7期
杨 茜
(江南机电设计研究所,贵阳 550009)
0 引言
巡航导弹是防空武器系统防空作战中面临的传统威胁之一,随着巡航导弹飞行高度的不断降低,地面防空武器系统受到视距、地形遮蔽等限制,越来越难以在早期发现,并跟踪该类低空/超低空目标,无法满足对抗巡航导弹饱和攻击的防空任务需求。然而,战斗机、预警机等空中平台具有前出、远距、高位探测优势,可向地面防空武器系统提供战场态势、目标指示和引导,甚至是火控级制导信息,实现超地平线作战。因此,通过空地协同作战,一方面,可拓展防空火力包络,弥补地面防空武器系统拦截低空/超低空目标远界不足;另一方面,可使空中平台免受载弹量约束火力不足的限制,提升反巡航导弹饱和攻击任务的作战效能。
本文以空地协同作战为背景,将DODAF 作战视图作为研究工具,通过构建高层作战概念、组织机构关系、作战活动、作战资源等视图模型,对空地协同作战过程和指挥控制流程进行直观描述,为后续优化空地协同作战体系、顶层设计和装备研制提供参考。
1 DODAF 体系结构框架概述
DODAF 是美国国防部开发的系统架构规范,它定义了多个表示、描述体系结构的方法,并为体系/复杂系统的了解、对比、集成与互操作提供了开发和表达架构描述的规则和指南,其前身是美军C4ISR 体系结构框架,当前最新版本是2009 年颁发的DODAF 2.0[1-3]。
DODAF 2.0 架构框架主要包括全景视图(all viewpoint,AV)、能力视图(capacity viewpoint,CV)、数据和信息视图(data and information viewpoint,DIV)、作战视图(operation viewpoint,OV)、项目视图(project viewpoint,PV)、服务视图(services viewpoint,SvcV)、标准视图(standars viewpoint,StdV)、系统视图(system viewpoint,SV)[4-6]。
其中,作战视图集中反映了完成使命的机构、任务或执行的行动,以及彼此间必须交换的信息,其传达的是信息交换的种类、频率,信息交换支持哪些任务和活动以及信息交换的性质,其主要作战视图情况如表1 所示[7-8]。
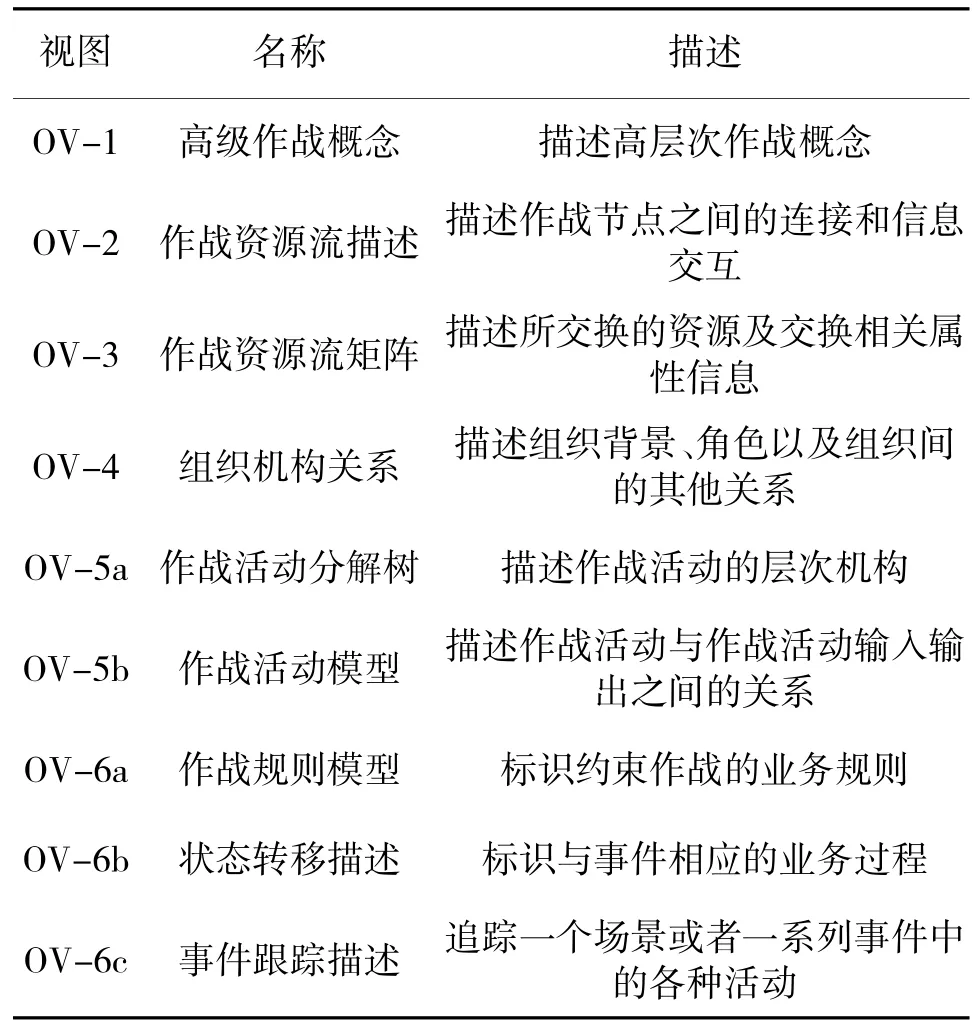
表1 作战视图Table 1 Operational view
其中,OV-6a 主要是以文档的形式描述在指定条件下体系架构的行为规则,由于OV-5、OV-6b、OV-6c 视图中相关决策点已反映了规则情况,故本文不再对OV-6a 内容进行阐述。
2 基于DODAF 的空地协同作战模型设计
空地协同作战是一种跨平台协同联合防空的典型作战模式,传统的作战过程描述如下:高级指挥中心制定战略决策,并向中级指挥中心传达作战任务,中级指挥中心领受作战任务后,结合自身实际情况制定作战方案,根据防空任务规划,分别向空基平台和地面防空武器系统下达协同任务,明确空基平台阵位及主要协同空域。空基平台抵达协同空域,与地面防空武器系统建链,实现通信,地面防空武器系统根据空基平台阵位设置禁射区。空基平台对探测到的目标信息进行预处理,将完成初判的目标信息传送至地面防空武器系统。地面防空武器系统进行目标威胁排序,并将协同拦截目标信息传递至空基平台。空基平台优先保障协同目标,跟踪并将信息持续发送至地面防空武器系统,地面防空武器系统进行射击诸元计算,当协同拦截目标进入地空导弹火力拦截区后,地面防空武器系统利用空基平台提供的目标信息,完成地空导弹远程发射。空基平台在地空导弹完成发射后,持续对目标进行搜索和跟踪,并将目标信息发送至地面防空武器系统,支持导弹中制导。
由上可知,传统的作战过程设计大部分是以分系统分别描述,再经总体整合而成,在描述的完整性、直观性等方面表现较差。同时,无法形成有效的作战模型用于后续的系统优化、顶层设计或装备研制。
由DODAF 作战视图特点并结合空地协同作战过程可知,开展基于DODAF 作战视图的空地协同作战模型设计,可为地空导弹武器系统以及各分系统提供较为全面且直观、易于理解的作战过程描述和有信息交互、作战逻辑关系的作战模型。
基于DODAF 作战视图的空地协同作战模型主要设计过程如下[9]:
1)通过构建高级作战概念视图OV-1,可以从宏观角度描述空地协同作战概念和背景,便于不同层次的决策者和设计者沟通交流;
2)通过构建组织机构关系视图OV-4,可以直观描述空地协同作战时各级组织之间的指挥结构及层级;
3)通过构建作战活动视图OV-5,可以直观描述完成作战任务时所涉及的作战过程及主要作战活动,并明确作战活动的输入输出等内容;
4)通过构建作战资源流OV-2,可以直观地描述作战过程中作战节点连接和信息交互情况;
5)通过构建作战事件跟踪描述和状态转换视图OV-6,可以直观地描述作战活动发生顺序、相互关联以及作战节点状态变化情况;
6)通过形成作战资源流矩阵OV-3,可以以表格形式描述作战活动之间信息要素、信息节点以及信息交换内容。
3 空地协同作战视图
3.1 高级作战概念图(OV-1)
OV-1 是对空地协同作战的一种图形描述,从宏观角度描述空地协同作战概念及背景,用于不同层次的决策者和设计者的沟通交流。根据空地协同作战过程的描述,可将作战过程抽象为一个OODA环过程,即分为O(observation)、O(orient)、D(decision)、A(action)4 个阶段,主要参与对象包括了高级指挥中心、中级指挥中心、空基平台(探测系统)、地面防空武器系统(含地面探测制导系统、指挥控制系统和火力抗击系统)等,如图1 所示。
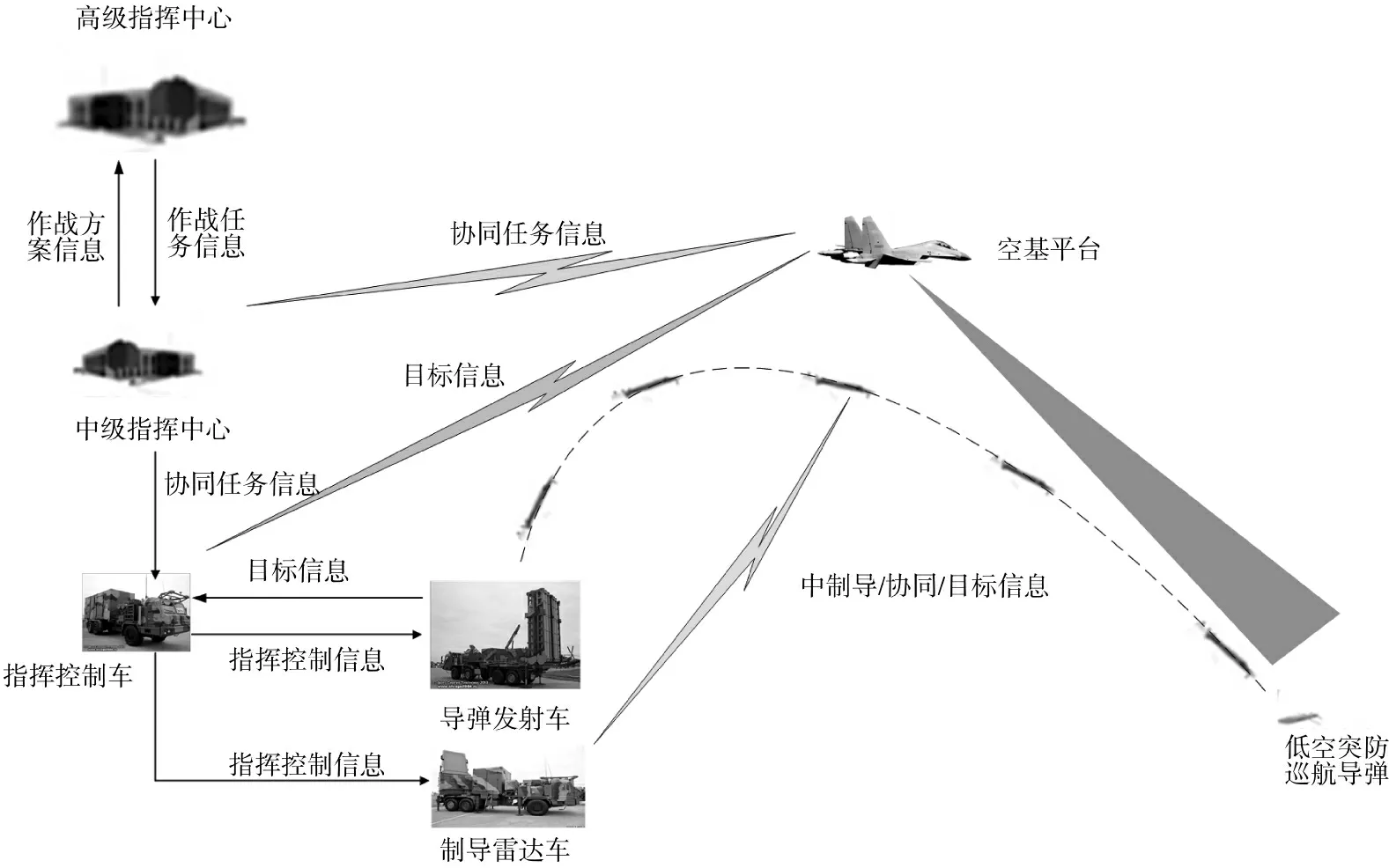
图1 高级作战概念Fig.1 High-level combat concept
3.2 组织关系图(OV-4)
OV-4 将空地协同作战过程中各级组织作为节点,对它们之间的指挥关系、各级组织以节点的形式进行展示,如图2 所示。
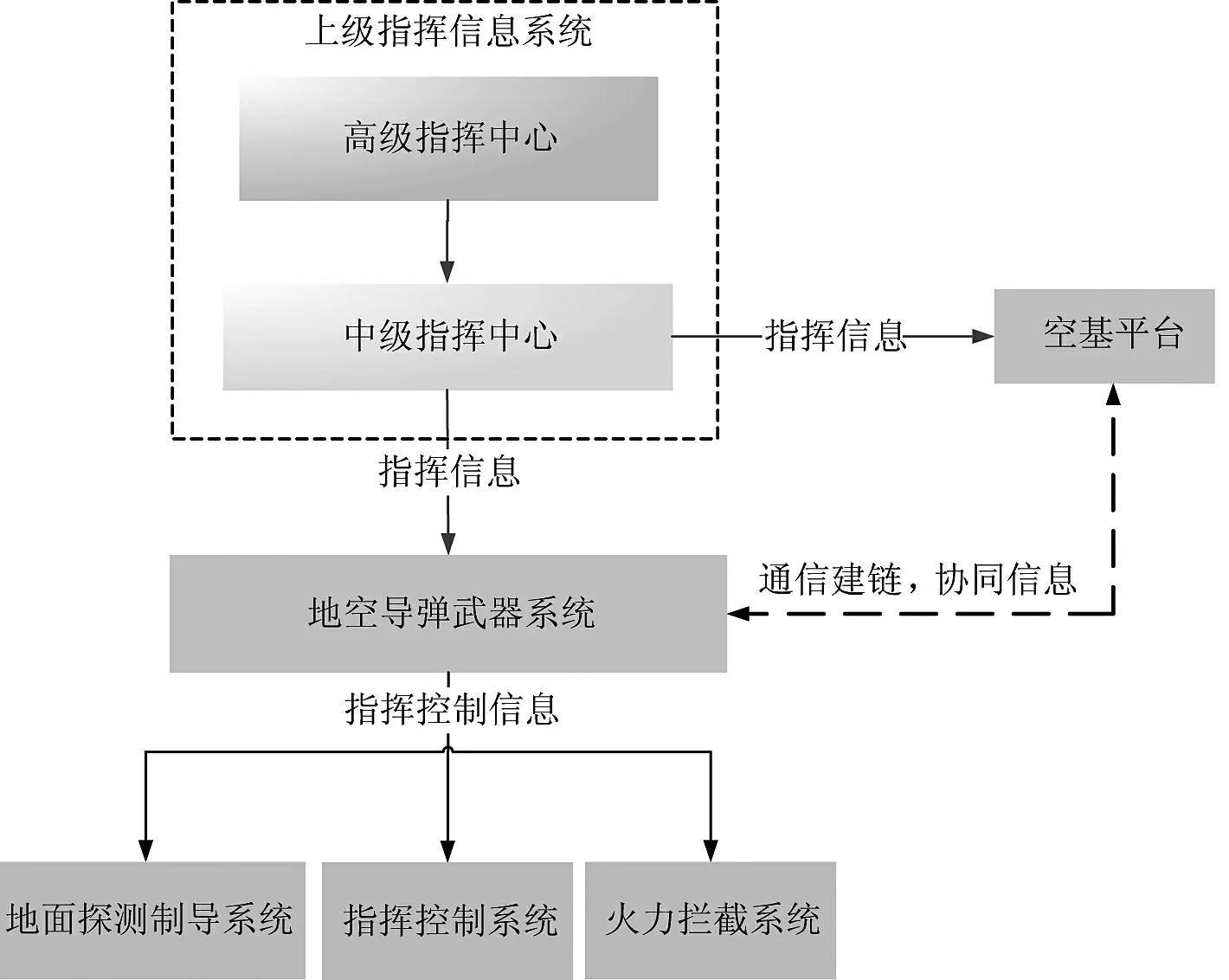
图2 组织机构关系Fig.2 Organizational relationship
其中,高级指挥中心主要负责战略决策,传达作战任务;中级指挥中心主要根据下发的作战任务,结合自身实际情况制定作战方案,下达作战命令;地面防空武器系统指挥控制系统和空基平台领受空地协同作战命令,实施空地协同作战。
3.3 作战活动图(OV-5)
OV-5 主要描述完成空地协同作战目标所涉及的作战活动,分为OV-5a(作战活动分解树)和OV-5b(作战活动模型)两种视图。
1)采用分层结构对作战活动进行逐层分解,结合OODA 环过程[10],形成OV-5a 视图,如下页图3所示。

图3 作战活动分解树Fig.3 Decomposition tree of combat activities
观察阶段:地面防空武器系统和空基平台根据受领的空地协同作战任务,完成通信建链,地面防空武器系统地面探测制导系统和空基平台对作战空域内目标进行探测及跟踪,并将目标信息传递至指挥控制系统;
判断阶段:地面防空武器系统接收不同信息源目标信息,并进行融合处理,选出需要空地协同拦截的目标,并向空基平台发送协同拦截目标信息;其余目标交由地面探测制导系统持续跟踪;
决策阶段:空基平台优先保障协同拦截目标;地面防空武器系统指挥控制系统利用空基平台下发的协同拦截目标信息,完成射击诸元计算,当目标进入地面防空武器系统火力拦截区域后,向火力拦截平台下达地空导弹发射命令;
行动阶段:地面防空武器系统发射防空导弹,实施拦截;空基平台持续提供目标信息,支持防空导弹的制导交班过程;弹目遭遇后,空基平台进行射击效果评估,并向地面防空武器系统通报,地面防空武器系统视情启动二次拦截或转移火力。
2)对各种作战活动的输入流、输出流进行描述,梳理各作战活动之间时序关系,形成OV-5b 视图,如图4 所示。

图4 作战活动模型Fig.4 Models of combat activities
3.4 作战资源流(OV-2)
OV-2 主要用于对作战节点进行归类,并明确节点间的信息交互,是对OV-5 作战视图的归纳描述,如图5 所示。

图5 作战资源流Fig.5 Flow of combat resources
3.5 作战状态转换/事件追踪图(OV-6)
OV-6b 用于描述空地协同作战过程中自身状态的转换,如图6 所示,若拦截成功,则作战结束或火力转移,否则,继续进行拦截。

图6 状态转移描述Fig.6 Description of state transition
OV-6c 主要描述空地协同作战过程中重要节点(空基平台、指挥控制中心和地面防空武器系统等)之间的信息状态时序逻辑,用于定义接口关系,保证各个作战节点具备必要的信息进行合理对接,如图7 所示。
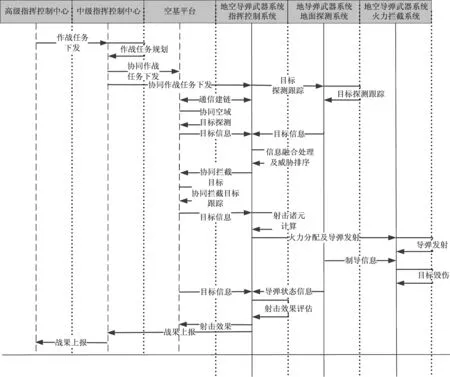
图7 事件跟踪描述Fig.7 Description of event tracking
3.6 作战资源流矩阵(OV-3)
OV-3 主要是以表格形式描述信息交换内容,确定作战活动之间所使用的作战信息要素以及节点,如下页表2 所示。

表2 作战资源流矩阵Table 2 Flow matrix of combat resources
4 作战模型自洽性验证
采用符合DODAF2.0 框架标准的体系架构设计仿真工具,在可视化建模环境中完成基于DODAF作战视图的作战模型设计,并通过动态状态转换(如图8 所示)和动态时序描述(如图9 所示)仿真,对作战模型的逻辑设计合理性进行了验证,结果满足设计要求。

图8 动态状态转换Fig.8 Dynamic state transition
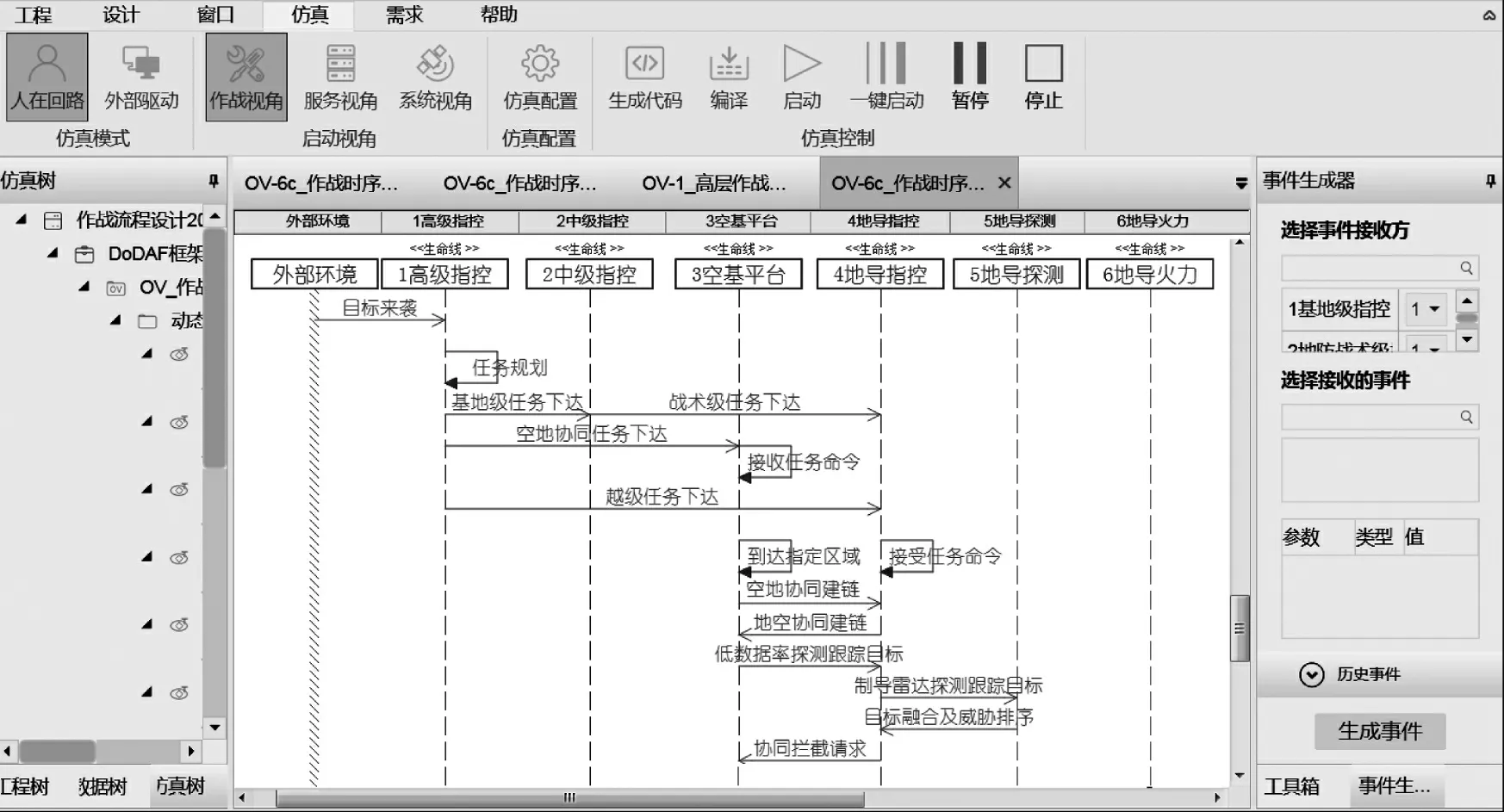
图9 动态时序描述Fig.9 Description of dynamic sequence
5 结论
本文以空地协同作战过程为基础,并结合DODAF 作战视图特点,构建了基于DODAF 作战视图的空地协同作战模型(OV-1、OV-4、OV-5、OV-2、OV-6、OV-3)。多视图描述了作战体系中各系统、节点之间的组织关系、作战活动、作战资源等内容,相较于传统的作战过程设计,一方面,能够为地空导弹武器系统以及各分系统提供较为全面且直观、易于理解的作战模型,便于决策者或设计者之间的沟通交流;另一方面,通过构建作战模型以及信息交互、作战逻辑关系自洽验证,可为后续的系统优化、顶层设计和装备研制提供一定的参考。
猜你喜欢
小学科学(学生版)(2021年9期)2021-11-02
小学科学(学生版)(2021年8期)2021-08-30
小哥白尼(军事科学)(2021年1期)2021-07-16
民用飞机设计与研究(2020年4期)2021-01-21
小哥白尼(军事科学)(2020年12期)2021-01-18
海峡姐妹(2017年11期)2018-01-30
大陆桥视野·下(2017年5期)2017-06-19
北京航空航天大学学报(2016年7期)2016-11-16
军事运筹与系统工程(2016年4期)2016-07-10
现代防御技术(2016年1期)2016-06-01