
基于支持向量机的施工升降机制动器故障诊断方法
2023-10-18 09:48朱少龙
工程机械与维修 2023年5期
朱少龙


摘要:针对当前施工升降机制动器故障诊断过程中,制动器信号分析能力较差,导致诊断准确率较低,无法判定故障的真实类型的问题,提出基于支持向量机的施工升降机制动器故障诊断方法。采用小波包分析法,确定运行信号信息,获取故障特征向量。构建支持向量机模型,分析信号类型。增加环境扰动计算环节,提升支持向量机分类结果准确性,实现施工升降机制动器故障诊断。实验结果表明:此方法可有效提升故障诊断准确性,且可对故障类型进行高精度分析。
关键词:支持向量机;施工升降机;制动器;故障诊断;二分法
0 引言
随着城市化进程不断加速,高层建筑的数量几何倍数增加。施工升降机作为建筑施工垂直运输过程中一种较为重要的设备,在高层建筑施工中应用十分广泛。施工升降机为各类建筑的施工提供了大量的便利,进一步提高了高层建筑施工进度,缩短了基础工程的工期。
由于施工环境的复杂性与恶劣性,施工升降机制动器故障频发,造成了较为严重的施工事故。在过去研究中,部分学者虽然提出了一些针对施工升降机制动器的故障诊断方法,但整体应用效果不佳[1-2]。
此类故障识别方法,多将制动器故障视作一对一故障,且在诊断过程中忽视环境对诊断结果的影响,导致诊断准确率较低,无法判定故障的真实类型。
针对此问题,本文使用支持向量机完善原有故障诊断方法,提出基于支持向量机的施工升降机制动器故障诊断方法。支持向量机是一种类别分析算法,应用它可加速信号数据分析,为后续的故障识别提供便利条件。
1 获取故障特征向量
此次研究中,将施工过程中应用的升降机作为研究对象,因此在进行诊断时需要采集设备运行信号,以此反映制动器的时变信号。
1.1 采集流程
获取采集结果中的非平稳时变信号,并提取其中可反映设备运行状态的特征向量。由于信号中带有一定的时域特征与频域特征,需要采用小波包分析[3-4],將采集到的信号细化分解为全频带,确定各信号地段的分辨率,从中提取特征向量。
1.2 对采集到的信号进行小波分解
在施工升降机制动器中安装高精度信号采集器,获取设备运行信号样本。信号采集完成后,对信号样本进行多层级小波包分解,获取每个频段中的高频信号特征Aij。其中:i表示信号特征获取层级,j表示信号特征获取节点个数。
1.3 获取总信号量
1.4 计算各频带信号的总能量
1.5 构造整体特征向量
整理上述内容,并使用以上计算公式提取信号特征。应用此设定获取正常信号与故障信号,并重复上述内容,得到特征向量集合。
2 施工升降机制动器故障诊断方法设计
2.1 构建支持向量机模型
此研究中,将支持向量机作为核心技术完成制动器的故障诊断工作。支持向量机可通过线性思维对指定平面中的数据进行分析,适用于故障诊断此类二分问题。但由于真实故障类别较多,且形成原因较为复杂。因此,需要将支持向量机转化为“一对多”形式。
将“一对一”格式[5]作为基础,将多种故障类型问题转化为多类型问题。在进行数据训练时,可将非故障数据视作正类,故障数据视作负类,构建出支持向量分类器。为保证此分类器的应用效果,对其进行测试。将未知类型数据输入到此分类器中,计算决策函数值,并将函数值最大的分类器作为正类输出。
由于本次研究中需分析的内容较为复杂,此次研究中在设定好的向量机中增加相应的核函数。将原有向量机中的平面空间转化为高维空间,并在其中进行相应的内积运算。为降低计算难度,可采用原平面中的函数完成数据处理过程。
根据支持向量机核函数的相关理论,使用Mercer条件[6-7]对向量机中进行约束,并确定空间变换中的内积。在最优分类平面中,采用适当的内积核函数进行处理,由此实现平面空间向高维空间的转化过程。与此同时,控制向量机部分节点设定的线性函数,在每个函数中增加数据样本,计算其与支持向量之间的内乘积,并在此基础上构建支持向量网络。
2.2 施工升降机制动器故障诊断
在上述设定内容的基础上,应用支持向量机完成施工升降机制动器故障诊断。针对施工升降机制动器的工作环境进行分析,以避免外部环境对故障诊断造成影响。
3 实验论证分析
针对本次研究中提出的基于支持向量机的施工升降机制动器故障诊断方法,应用数据样本分析的方式,确定此方法的故障诊断性能。
3.1 数据样本准备
本次实验将在制动器实验台中完成。实验台相关参数,按照相关要求展开设定,并在此实验台获取制动器故障参数。此次实验主要通过弹簧力、制动油压1、制动油压2以及紧急制动信号量,确定实验样本的故障情况。具体故障样本如表1 所示。
将上述数据作为基础,对每组的实验信号进行扩充,将信号数据中增加正常信号,每组信号达到1000条。使用文中方法、基础方法以及机械视觉方法、神经网络方法,对上述数据进行诊断,确定不同方法的应用差异。
3.2 故障识别准确率实验分析
应用上述实验设定内容,对不同方法的故障识别准确率进行分析。故障识别准确率如表2所示。
对表2中数据进行分析可以看出,文中方法在使用后,可对测试组中的样本进行高精度分析,并从中提取到相应的故障信号。文中方法的故障识别准确性控制在[98.00%,99.00%]之间,
与文中方法相比,其他3种方法的应用效果相对较差,整体故障诊断精度维持在92.00%~96.00%之间。由此实验结果可以确定,文中方法的故障诊断能力优于其他2种方法,相对应用效果较强。
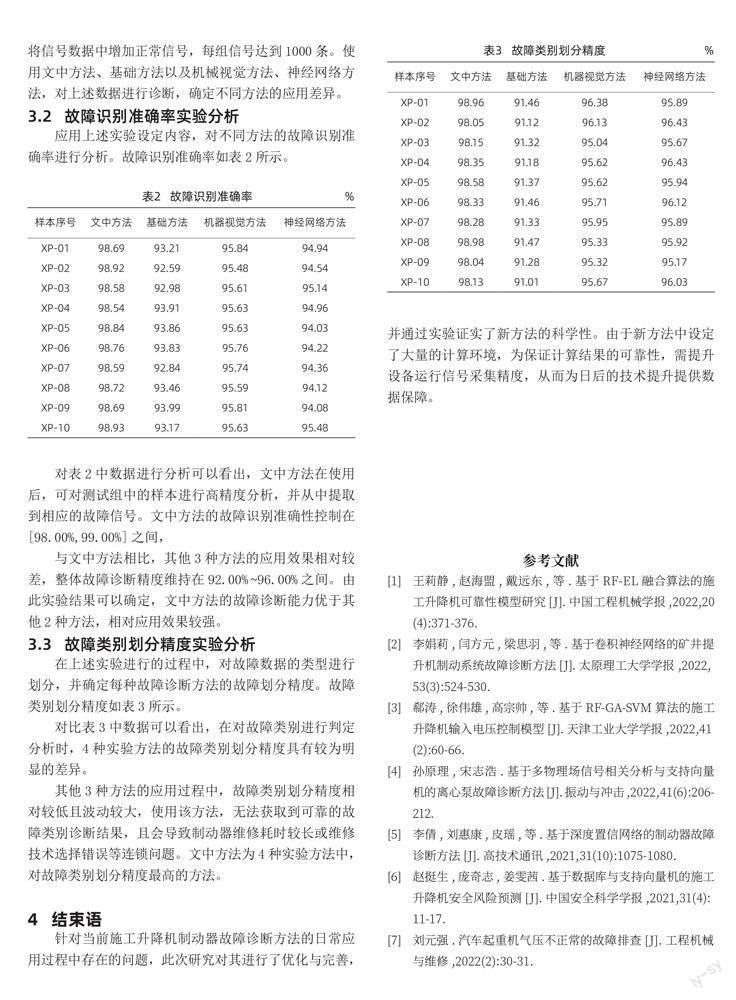
3.3 故障类别划分精度实验分析
在上述实验进行的过程中,对故障数据的类型进行划分,并确定每种故障诊断方法的故障划分精度。故障类别划分精度如表3所示。
对比表3中数据可以看出,在对故障类别进行判定分析时,4种实验方法的故障类别划分精度具有较为明显的差异。
其他3种方法的应用过程中,故障类别划分精度相对较低且波动较大,使用该方法,无法获取到可靠的故障类别诊断结果,且会导致制动器维修耗时较长或维修技术选择错误等连锁问题。文中方法为4种实验方法中,对故障类别划分精度最高的方法。
4 結束语
针对当前施工升降机制动器故障诊断方法的日常应用过程中存在的问题,此次研究对其进行了优化与完善,并通过实验证实了新方法的科学性。由于新方法中设定了大量的计算环境,为保证计算结果的可靠性,需提升设备运行信号采集精度,从而为日后的技术提升提供数据保障。
参考文献
[1] 王莉静,赵海盟,戴远东,等.基于RF-EL融合算法的施工升降机可靠性模型研究[J].中国工程机械学报,2022,20(4):371-376.
[2] 李娟莉,闫方元,梁思羽,等.基于卷积神经网络的矿井提升机制动系统故障诊断方法[J].太原理工大学学报,2022,53(3):524-530.
[3] 郗涛,徐伟雄,高宗帅,等.基于RF-GA-SVM算法的施工升降机输入电压控制模型[J].天津工业大学学报,2022,41(2):60-66.
[4] 孙原理,宋志浩.基于多物理场信号相关分析与支持向量 机的离心泵故障诊断方法[J].振动与冲击,2022,41(6):206-212.
[5] 李倩,刘惠康,皮瑶,等.基于深度置信网络的制动器故障诊断方法[J].高技术通讯,2021,31(10):1075-1080.
[6] 赵挺生,庞奇志,姜雯茜.基于数据库与支持向量机的施工升降机安全风险预测[J].中国安全科学学报,2021,31(4):11-17.
[7] 刘元强.汽车起重机气压不正常的故障排查[J].工程机械与维修,2022(2):30-31.
猜你喜欢
机电信息(2022年9期)2022-05-07
江苏安全生产(2021年9期)2021-11-27
中国交通信息化(2021年1期)2021-06-11
中学生数理化·自主招生(2021年3期)2021-05-30
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
中国特种设备安全(2019年3期)2019-04-22
中学生数理化·七年级数学人教版(2018年3期)2018-05-30
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
价值工程(2016年29期)2016-11-14
