
基于ANSYS的折臂式高空作业车作业臂模态分析
2023-10-18 21:16:45冯辉孟杰张小龙
工程机械与维修 2023年5期
关键词:模态分析
冯辉 孟杰 张小龙
摘要:采用ANSYS有限元软件,对在风载荷作用下的工作臂进行结构分析。对三维模型的建立、引入、单元类型选取、网格划分、约束与负荷的处理等进行较为详尽论述,并对各种折臂间的应力集中进行分析,研究结果可为折臂式高空作业车工作部分的设计提供理论支持和参考。
关键词:折臂;高空作业车;有限元软件;模态分析
0 引言
高空作业平台是一种将作业机具、工作人员送入指定的高空作业场所的设备,其具有工作稳定、操作简单、自动调整升降、安全可靠等诸多优势,大大提高了工作的工作效率。
保证高空作业设备的安全可靠运行,具有十分重要的现实意义,目前,国内外众多学者对次进行了研究。郭维城[1]采用机器人正、逆运动学求解方法,确定出曲臂式高空作业车各关节角。张林生[2]和蒙杨超[3]等人对作业平台和臂架的结构设计进行了整体结构设计。王添羽[4]等人通过创新理论TRIZ的结合,总结出关于高空作业车的民用新方案。李晶[5]等人从提高生产质量、降低成本出发,对关键部位进行非正常受力分析。蒋红旗[6]等人根据Davenport风速谱模拟得到了脉动风载荷时程。
本文主要从折臂式高空作业车的臂架结构出发,进行静动态特性分析,对风载荷的可靠性进行分析,采用 ANSYS Workbench软件进行了结构动力学分析,并提出改进方案。
1 作业臂结构组成及原理
1.1 结构组成
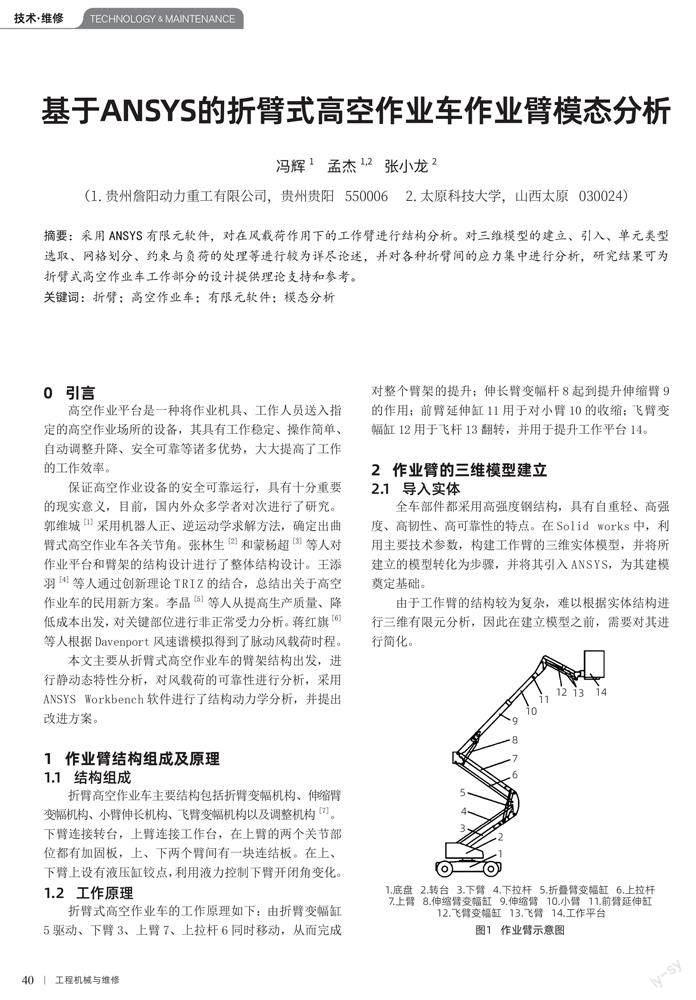
折臂高空作业车主要结构包括折臂变幅机构、伸缩臂变幅机构、小臂伸长机构、飞臂变幅机构以及调整机构[7]。下臂连接转台,上臂连接工作台,在上臂的两个关节部位都有加固板,上、下两个臂间有一块连结板。在上、下臂上设有液压缸铰点,利用液力控制下臂开闭角变化。
1.2 工作原理
折臂式高空作业车的工作原理如下:由折臂变幅缸5驱动、下臂3、上臂7、上拉杆6同时移动,从而完成对整个臂架的提升;伸长臂变幅杆8起到提升伸缩臂9的作用;前臂延伸缸11用于对小臂10的收缩;飞臂变幅缸12用于飞杆13翻转,并用于提升工作平台14。
2 作业臂的三维模型建立
2.1 导入实体
全车部件都采用高强度钢结构,具有自重轻、高强度、高韧性、高可靠性的特点。在Solid works中,利用主要技术参数,构建工作臂的三维实体模型,并将所建立的模型转化为步骤,并将其引入ANSYS,为其建模奠定基础。
由于工作臂的结构较为复杂,难以根据实体结构进行三维有限元分析,因此在建立模型之前,需要对其进行简化。
在不影响计算精度的情况下,对复杂结构进行合理的简化是非常有必要的。对复杂结构进行合理简化,省去很多繁杂的工作,使工作量大为降低,有效缩短了设计时间,为以后的改进提供了有利的条件。在模型制作过程中,将工作臂上的一些小孔和凸缘去掉,对整体的强度和刚度影响不大,但是在网格分割中节约了大量的计算机资源。
2.2 建立有限元模型
将基座以及旋转平台合为一个部分,将上臂、下臂、小臂以及工作平台都看成一个独立部分,便于进行接下来的网格划分。各臂间连接以及销轴之间为接触约束,建立有限元模型,对其进行结构分析。
在对工作臂进行三维网格分割之前,要充分考虑到材料性质。工作臂采用高强度钢板,为此预设结构钢密度为7850kg/m3,泊松比为0.3。
采用Free网格方法划分网格。由于臂长尺寸较大,而厚度较小,故采用人工设置网格尺寸大小,上下臂和伸缩臂的单元边长取0.1。在伸缩臂达到最大时,对工作平台风载作用下的模态及应力应变进行分析。工作台的单元边长取0.005,最终形成的有限元模型节点数为57628,单元数为30197。
高空作业车进行作业时,受到的载荷有起吊重物重力、本身重力、侧向载荷以及自然界的风载荷等,风载荷作用于臂架的侧面。高空作业时,工作平台因距地面最高,受到的风载作用最大,为此研究风载施加臂架侧面时工作平台的模态。
3 模态分析
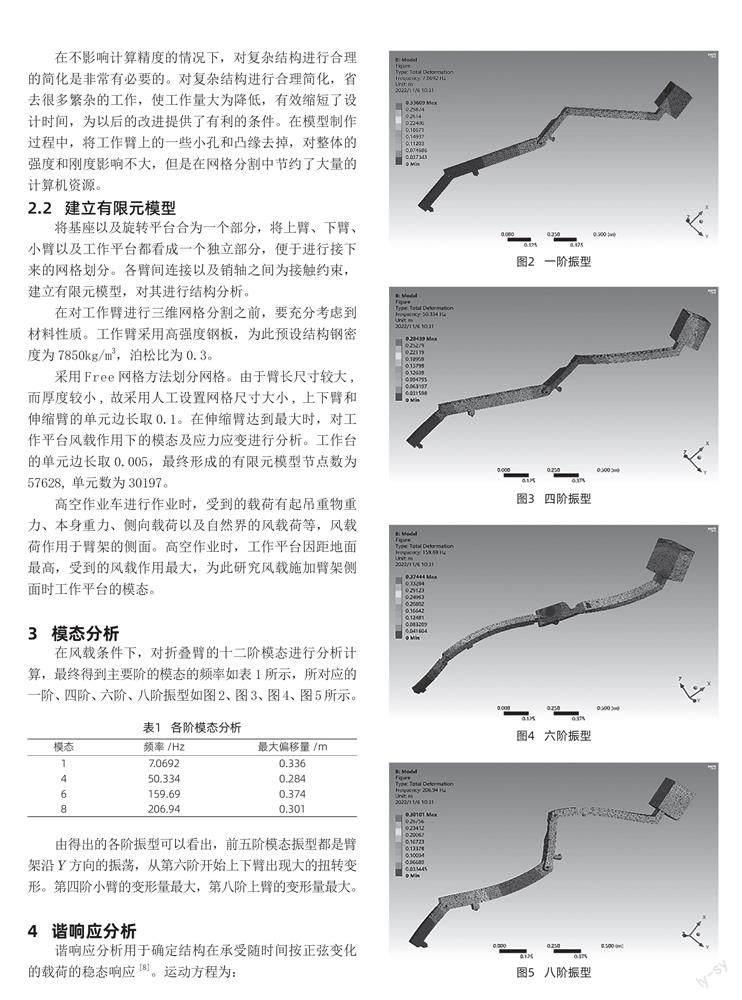
在风载条件下,对折叠臂的十二阶模态进行分析计算,最终得到主要阶的模态的频率如表1所示,所对应的一阶、四阶、六阶、八阶振型如图2、图3、图4、图5所示。
由得出的各阶振型可以看出,前五阶模态振型都是臂架沿Y方向的振荡,从第六阶开始上下臂出现大的扭转变形。第四阶小臂的变形量最大,第八阶上臂的变形量最大。
4 谐响应分析
4.1 加载及约束
4.2 频率响应分析
在模态分析中,一般来说对振型的影响最大的是低阶模态,而高阶振型对振型的影响很小,且随着阶次的增加,对振型的影响也越来越小。因此,本文将振型分析中最早的12个频率作为谐振响应的频域,即振动频率0~250Hz之间。
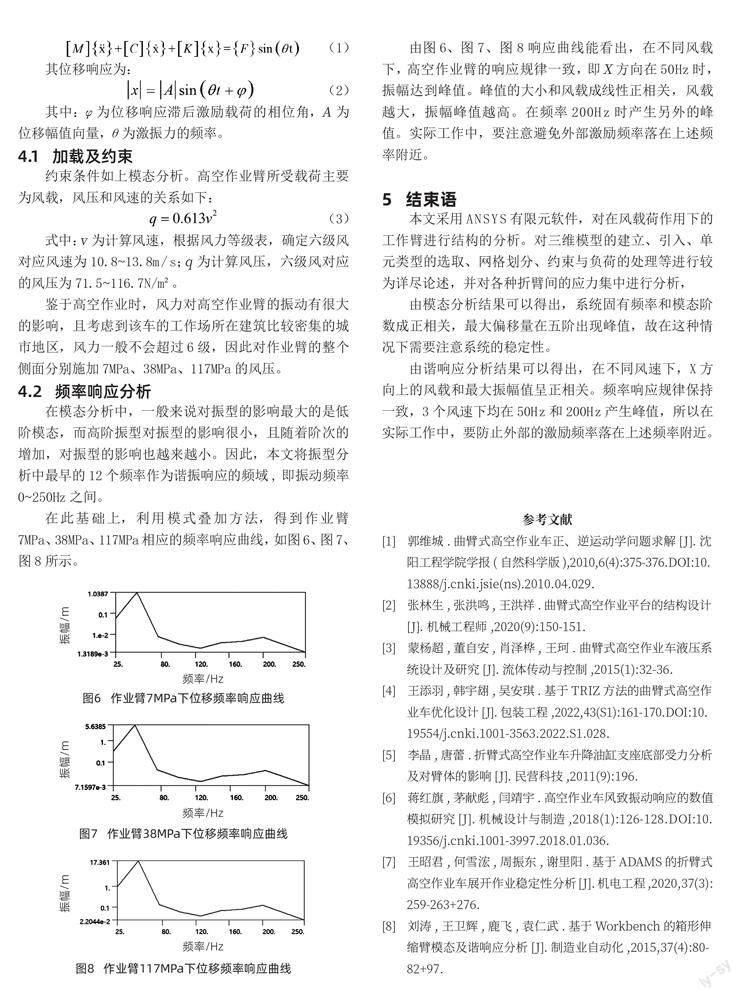
在此基础上,利用模式叠加方法,得到作业臂7MPa、38MPa、117MPa相应的频率响应曲线,如图6、图7、图8所示。
由图6、图7、图8响应曲线能看出,在不同风载下,高空作业臂的响应规律一致,即X方向在50Hz时,振幅达到峰值。峰值的大小和风载成线性正相关,风载越大,振幅峰值越高。在频率200Hz时产生另外的峰值。实际工作中,要注意避免外部激励频率落在上述频率附近。
5 结束语
本文采用ANSYS有限元软件,对在风载荷作用下的工作臂进行结构的分析。对三维模型的建立、引入、单元类型的选取、网格划分、约束与负荷的处理等进行较为详尽论述,并对各种折臂间的应力集中进行分析,
由模态分析结果可以得出,系统固有频率和模态阶数成正相关,最大偏移量在五阶出现峰值,故在这种情况下需要注意系统的稳定性。
由谐响应分析结果可以得出,在不同风速下,X方向上的风载和最大振幅值呈正相关。频率响应规律保持一致,3个风速下均在50Hz和200Hz产生峰值,所以在实际工作中,要防止外部的激励频率落在上述频率附近。
参考文献
[1] 郭维城.曲臂式高空作业车正、逆运动学问题求解[J].沈阳工程学院学报(自然科学版),2010,6(4):375-376.DOI:10.13888/j.cnki.jsie(ns).2010.04.029.
[2] 张林生,张洪鸣,王洪祥.曲臂式高空作业平台的结构设计[J].机械工程师,2020(9):150-151.
[3] 蒙楊超,董自安,肖泽桦,王珂.曲臂式高空作业车液压系统设计及研究[J].流体传动与控制,2015(1):32-36.
[4] 王添羽,韩宇翃,吴安琪.基于TRIZ方法的曲臂式高空作业车优化设计[J].包装工程,2022,43(S1):161-170.DOI:10.19554/j.cnki.1001-3563.2022.S1.028.
[5] 李晶,唐蕾.折臂式高空作业车升降油缸支座底部受力分析及对臂体的影响[J].民营科技,2011(9):196.
[6] 蒋红旗,茅献彪,闫靖宇.高空作业车风致振动响应的数值模拟研究[J].机械设计与制造,2018(1):126-128.DOI:10.19356/j.cnki.1001-3997.2018.01.036.
[7] 王昭君,何雪浤,周振东,谢里阳.基于ADAMS的折臂式高空作业车展开作业稳定性分析[J].机电工程,2020,37(3):259-263+276.
[8] 刘涛,王卫辉,鹿飞,袁仁武.基于Workbench的箱形伸缩臂模态及谐响应分析[J].制造业自动化,2015,37(4):80-82+97.
猜你喜欢
建材发展导向(2016年6期)2017-01-17 18:17:30
东方教育(2016年18期)2017-01-16 16:51:31
成长·读写月刊(2016年12期)2017-01-12 18:22:23
科技创新与应用(2016年34期)2016-12-23 16:02:39
科技创新与应用(2016年31期)2016-12-03 04:28:57
农机使用与维修(2016年10期)2016-11-10 09:15:00
科技视界(2016年24期)2016-10-11 22:05:47
科技视界(2016年14期)2016-06-08 12:48:41
中国科技博览(2016年1期)2016-04-25 11:30:29
科技视界(2016年4期)2016-02-22 12:28:59
