
基于多紫外相机的旋流火焰三维锋面层析重建
2023-10-17 04:01倪浩伟刘国炎周毅张彪柳伟杰许传龙
航空学报 2023年18期
倪浩伟,刘国炎,周毅,张彪,柳伟杰,许传龙,*
1.东南大学 能源与环境学院 大型发电装备安全运行与智能测控国家工程研究中心,南京 210096
2.中国航空发动机研究院 基础与应用研究中心,北京 101304
贫燃预混旋流燃烧技术通过降低火焰中心反应区温度,可有效减少氮氧化物的排放,目前已广泛应用于航空发动机、燃气轮机等领域[1-2]。然而,由于旋流火焰流场复杂且燃烧脉动频繁,该技术在实际工况中存在由热声耦合振荡引起的动态不稳定性问题[3-5],严重时可能造成设备损坏。相关研究表明,旋流火焰锋面在燃烧传热传质过程中具有重要作用,其锋面形态反映了火焰宏观结构和燃烧稳定性[6-9],例如沿内剪切层稳定的“V”形,以及沿内外剪切层和外回流区稳定的“M”形[9]。实现旋流火焰瞬态三维锋面结构的测量与表征,对旋流燃烧机理研究和旋流燃烧器优化设计具有重要实际意义。
近年来,针对火焰锋面结构测量技术已经开展了大量研究。其中,光学测量技术因具有非侵入、灵敏度高、速度快等特点,逐渐成为表征火焰精细结构的有效方法之一。目前较为成熟的光学测量技术主要有激光诱导荧光(Laser Induced Fluorescence,LIF)技术和火焰化学发光层析成像(Computed Tomography of Chemiluminescence,CTC)技术,二者都是利用化学反应自由基来表征火焰锋面结构的。LIF采用特定波长的激光激发火焰燃烧化学反应自由基(如OH、CH),通过增强型相机(Intensified CDD, ICCD)捕捉激发态自由基能级跃迁产生的荧光信号,获取火焰瞬态、定量的自由基分布信息。平面LIF(Planar LIF, PLIF)技术利用光学透镜组将激光束延展为激光片,实现了针对特定平面的二维测量[10-13]。在此基础上,发展了扫描式PLIF技术和体积LIF(Volumetric LIF, VLIF)技术实现火焰三维结构重建。扫描式PLIF技术利用激光片快速扫描测量空间,并记录连续的PLIF图像,通过整合二维平面图像实现火焰结构的三维测量[14-15]。VLIF技术将点光源扩展为体光源并围绕燃烧器布置多台相机,获取荧光信号在不同方向上的投影图像,进而结合层析成像技术重建自由基的三维分布[16-17]。LIF技术具有实时原位测量、组分选择性强、图像信噪比高、灵敏度高等优点[12-13],但通常需要高频或高能量激光器、高速相机和像增强器,以捕获纳秒级曝光时间尺度下的瞬时荧光信号,所需光学设备昂贵且系统复杂。火焰化学发光是锋面中激发态自由基发生辐射跃迁并释放光子的现象,CTC技术通过多视角的光学系统,可实现特定自由基发光信号采集,从而获取火焰锋面不同方向上的结构信息,并进行高分辨率三维层析重建[18]。相较于LIF技术,CTC技术无需高能量激光器作为外部激励信号,因此在硬件系统成本方面具有较大优势。大量研究表明,CTC技术是一种极具潜力的光学测量技术[19-23],在火焰锋面三维重建领域已受到了广泛关注。
尽管CTC技术适用于火焰锋面的三维测量,但该方法在瞬态旋流火焰锋面的测量中仍存在一些挑战。主要挑战之一是旋流火焰锋面信息采集不足。火焰化学发光激发态自由基主要包括OH*(308 nm)、CH*(431 nm)、C2*(470~550 nm)[24-25]。其中,OH*在燃烧反应区发光效率高,分布范围大,发光波段窄且处于紫外区域,不受火焰背景辐射干扰,更适用于旋流火焰锋面瞬态表征。但受限于紫外波段量子效率较低,普通相机需要借助像增强器来获取OH*辐射发光的高质量图像,然而同时布置多台耦合了像增强器的相机成本高昂。为了降低硬件成本,有学者在光学成像系统中采用光纤束与ICCD相机耦合[22-23]的方法来捕获多个视角的化学发光投影图像。然而光纤束在传输时会造成严重的信号损失,同时多光纤束集成也导致提供给每一个视角的视场区域缩小[22],极大地影响了图像的采集信噪比。近些年来,随着紫外成像技术的高速发展,高灵敏度的紫外分辨电子传感器已应用于工业相机,实现了低成本、高信噪比的OH*辐射发光成像,为构建基于紫外成像的CTC系统和实现高精度的旋流火焰锋面测量提供了可能。
另一个挑战是旋流火焰锋面高分辨率层析重建存在计算量大、伪影明显等问题。代数重建算法[26](Algebraic Reconstruction Technique,ART)是一种通过误差迭代逐步修正未知数,可以在投影信息不完备或不均匀的条件下,实现对火焰锋面三维结构高精度反演重建的方法,目前已得到了大量应用。在ART基础上,进一步发展了乘型代数重建算法[27](Multiplicative Algebraic Reconstruction Technique,MART)和联合代数重建算法[28](Simultaneous Algebraic Reconstruction Technique,SART)。其中,SART具有较高的迭代效率和抗噪能力,获得了广泛关注。然而,SART在重建过程中将火焰测量空间离散为体素,其权重系数计算耗时极长。同时,由于SART会根据投影强度的计算误差对测量空间的离散体素进行修正,成像误差将导致重建结果沿投影方向存在严重的线状伪影[21]。相关研究表明[20-21,29],旋流火焰在喷嘴出口处发生扩张,整体结构通常呈碗形,因此喷嘴出口附近的测量空间中存在大量对图像强度没有贡献的零强度体素,如在重建时预先对这部分体素进行识别和排除,不仅有利于减少权重系数计算量,而且也将减少由零强度体素生成的部分伪影,从而可提升火焰结构重建质量。
针对上述挑战,本文提出一种基于多紫外相机成像的旋流火焰瞬态三维锋面层析重建方法,构建了基于多紫外相机阵列的CTC系统,发展了基于预识别技术的SART。开展了旋流火焰锋面重建数值模拟研究,对重建算法的反演精度和抗噪能力进行了评估。最后搭建了甲烷-空气贫燃预混旋流燃烧实验台,开展了基于多紫外相机的CTC系统标定和低旋流火焰锋面实验研究。
1 基于预识别技术的SART
1.1 火焰CTC原理
CTC通过布置不同视角的相机,获取旋流火焰激发态自由基辐射发光在不同方向上的投影图像,进而结合层析重建算法实现火焰锋面瞬态三维结构重建。图1为火焰化学发光成像模型,其中,Of为测量空间中心,Oc为主透镜中心。在成像过程中,三维火焰经过投影变化,在相机传感器平面上形成二维图像,假设光是带辐射能量的几何线束,由于单个像素的接收孔径角很小,因此可将相机镜头等效为针孔,用小孔成像模型等效相机成像过程。在CTC技术中,将测量空间离散为均匀的立方体(体素),并假设每个体素内的化学发光强度为恒定的值,CCD相机每个像素强度为投影方向上体素强度的积分。
以图1中像素点P1为例,投影方向上光线穿过的体素分别为V1,V2,…,Vn,辐射传输计算公式为
式中:aVi为体素Vi对像素P1的权重系数,即光线穿过体素长度与火焰散射、吸收系数的耦合项;xVi为体素Vi的强度值;bP1为像素P1的强度值。
考虑所有体素和像素,火焰化学发光成像模型可表示为
式中:M为像素个数;N为测量空间体素个数;A为权重系数矩阵;X为体素强度矩阵;B为投影强度矩阵。
通过相机采集火焰化学发光投影强度矩阵B,采用层析重建算法对式(2)进行反演求解,可获得空间体素强度X的三维分布。本文采用SART对旋流火焰锋面进行三维重建,计算公式为
式中:xj(k)和xj(k+1)分别为第k次和第(k+1)次迭代后的第j个体素的强度值;bi和分别为第i条光线的实际投影强度值和计算投影强度值;为第i条光线所穿过的体素对其贡献累计值;λ为松弛因子;Iα为投影角度α下所有光线集合。
实际重建过程中,由于SART需要获得每一个独立体素对传感器像素的权重系数,因此权重系数矩阵A的计算量与测量空间离散度成正相关,高分辨率的重建将导致极大的计算量。同时,由于SART根据实际投影与计算投影的差值对射线方向上的体素强度进行修正,因此成像误差将导致重建结果沿射线方向存在严重的线状伪影。事实上,由于旋流火焰在喷嘴出口处发生扩张,整体结构通常呈碗形,喷嘴出口附近的大部分离散体素都不包含火焰。这部分零强度体素对火焰投影图像没有贡献,同时在反演计算中可能由于成像误差生成伪影,如果能够预先进行识别并排除这些零强度体素,将有助于提升火焰结构的重建效率和质量。
1.2 预识别技术原理
本文提出了一种基于光线追踪技术的预识别方法,用于识别测量空间中的零强度体素,以减少权重系数计算量和重建伪影。预识别原理示意图如图2所示。在小孔成像模型中,光线由包含火焰的体素发出,经过透镜折射投影到相机传感器上,形成倒立的实像。从每个像素点出发逆向追踪光线,标识出光线穿过的体素。设σpre为预识别阈值,若传感器像素强度≤σpre,则认为该像素没有接收到火焰化学发光投影,其强度来源于成像系统噪声。假设图2中A为火焰图像上强度>σpre的某点,a1~a10为光线从该点出发穿过的体素,其中a4~a7包含火焰,以白色标出。然而,实际测量过程中火焰结构未知,只能得到这部分体素沿投影方向的强度积分大于σpre,无法准确判断包含火焰的体素,因此无法排除光路上除a4~a7以外的零强度体素。B为火焰图像上强度不大于σpre的某点,b1~b9为光线从该点出发穿过的体素。由于这部分体素沿投影方向的强度积分不大于σpre,因此可以判断b1~b9均为零强度体素,可将其全部排除。

图2 预识别原理示意图Fig.2 Schematic diagram of principle of pre-recognition method
采用预识别技术遍历像素后,测量空间中的大部分的零强度体素可以在计算权重系数之前被识别和排除,从而减少了计算量。权重系数矩阵计算完成后,可采用SART进行反演求解,重建旋流火焰锋面结构三维分布。最后将测量空间中缺失的体素赋值为0,使测量空间结构完整,同时避免了这部分体素生成伪影。图3为基于预识别技术的SART流程。
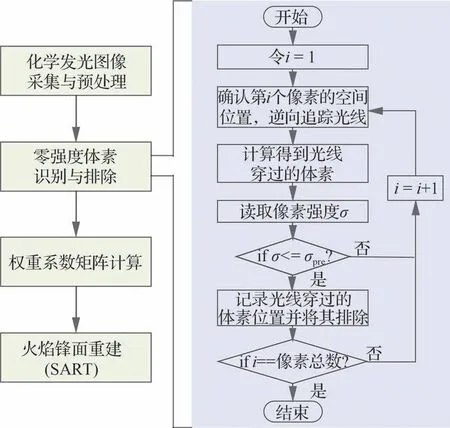
图3 基于预识别技术的SART流程图Fig.3 Flow chart of SART based on prerecognition method
2 旋流火焰瞬态三维锋面测量实验装置
2.1 预混低旋流燃烧装置
图4[3]为所采用的预混低旋流燃烧装置,用于基于多紫外相机成像的旋流燃烧火焰瞬态三维锋面层析重建验证实验。该装置主要由供气系 统 和 低 旋 流喷 嘴(Low Swirl Injector,LSI)2个部分构成[3]。空气从燃烧器底座十字分布的4个进气口径向通入,与高纯度甲烷进行预混后,输送到喷嘴出口处点燃。采用数字型质量流量计控制空气与甲烷的实时流量,其精度为0.01 L/min。
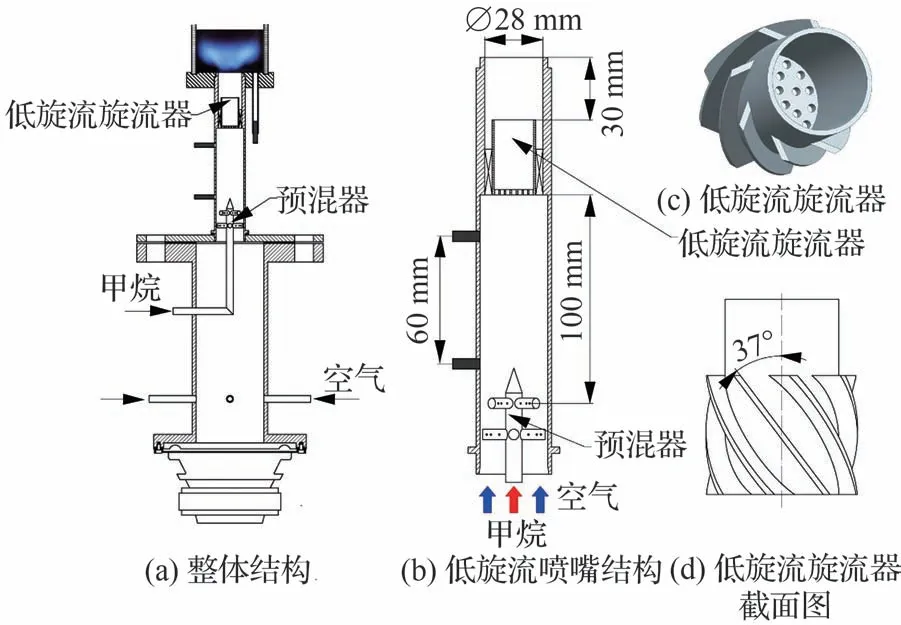
图4 预混低旋流燃烧装置示意图[3]Fig.4 Schematic diagram of premixed low-swirl flame combustor[3]
低旋流喷嘴由预混器和低旋流旋流器组成,内径为28 mm,如图4(b)所示。预混器表面均匀分布了48个直径为0.8 mm的小孔,甲烷气体由管路通入后,以较高的动量从小孔中喷射而出,实现与空气的充分混合。低旋流旋流器的结构如图4(c)和图4(d)所示,由圆柱形中心通道和8片等厚度的旋流叶片组成。中心通道直径为19 mm,在通道内部安装了一片多孔板,其上开设有30个直径为1.4 mm的小孔;旋流叶片安装在中心通道的环形表面上,出射角均为37°。这样的构造有利于一部分经过外部叶片的气流形成涡旋,而经过中心通道的气流保持不变,从而实现低旋流燃烧。低旋流燃烧器的几何旋流数为0.55。
2.2 基于多紫外相机成像的CTC系统
基于多紫外相机成像的CTC系统如图5所示。以燃烧器为中心,在等半径的圆形导轨上水平布置8台紫外相机,获取旋流火焰OH*辐射发光在不同方向上的投影图像。以燃烧器喷嘴出口中心为原点建立笛卡尔坐标系,定义x轴垂直于相机1传感器平面,z轴垂直于地面,y轴垂直于xz平面,坐标轴正方向在图5(a)所示的示意图中以箭头标出。相机固定于半径为420 mm的圆台导轨上,通过光学支架可灵活调整高度和角度使每台相机的传感器中心位于同一个xy平面并对准燃烧器中轴线。为防止2台相机正对导致折射误差以及有效追踪光线数减少,将每台相机之间的间隔角度θ设定为40°。紫外相机配备了紫外镜头(f=60 mm,f /3.8)和窄带滤光片((308±5) nm)以过滤噪声,并优化OH*辐射发光信号水平。8台相机由同步控制器通过外触发实现瞬时火焰图像同步采集,帧速率为20 Hz,曝光时长为200 μs。紫外相机参数如表1所示。
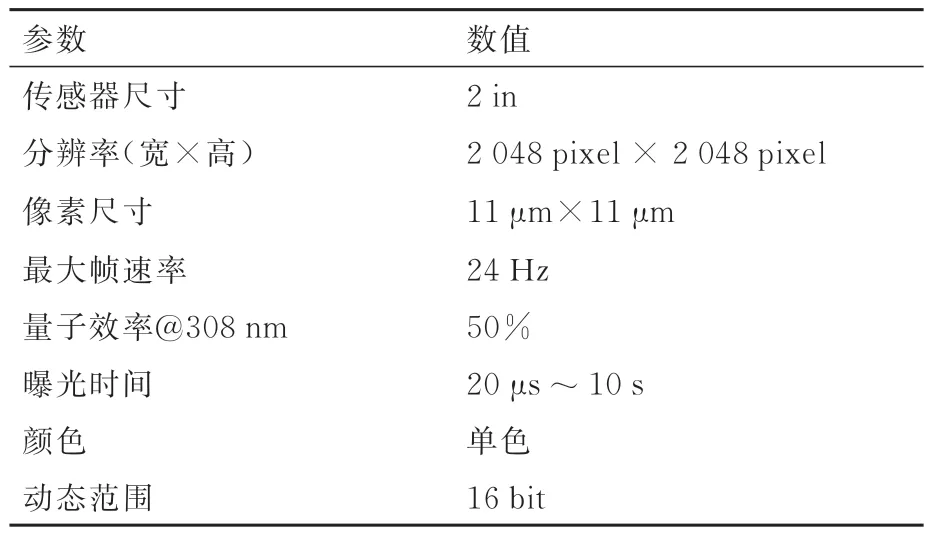
表1 紫外相机参数Table 1 Ultraviolet camera parameters
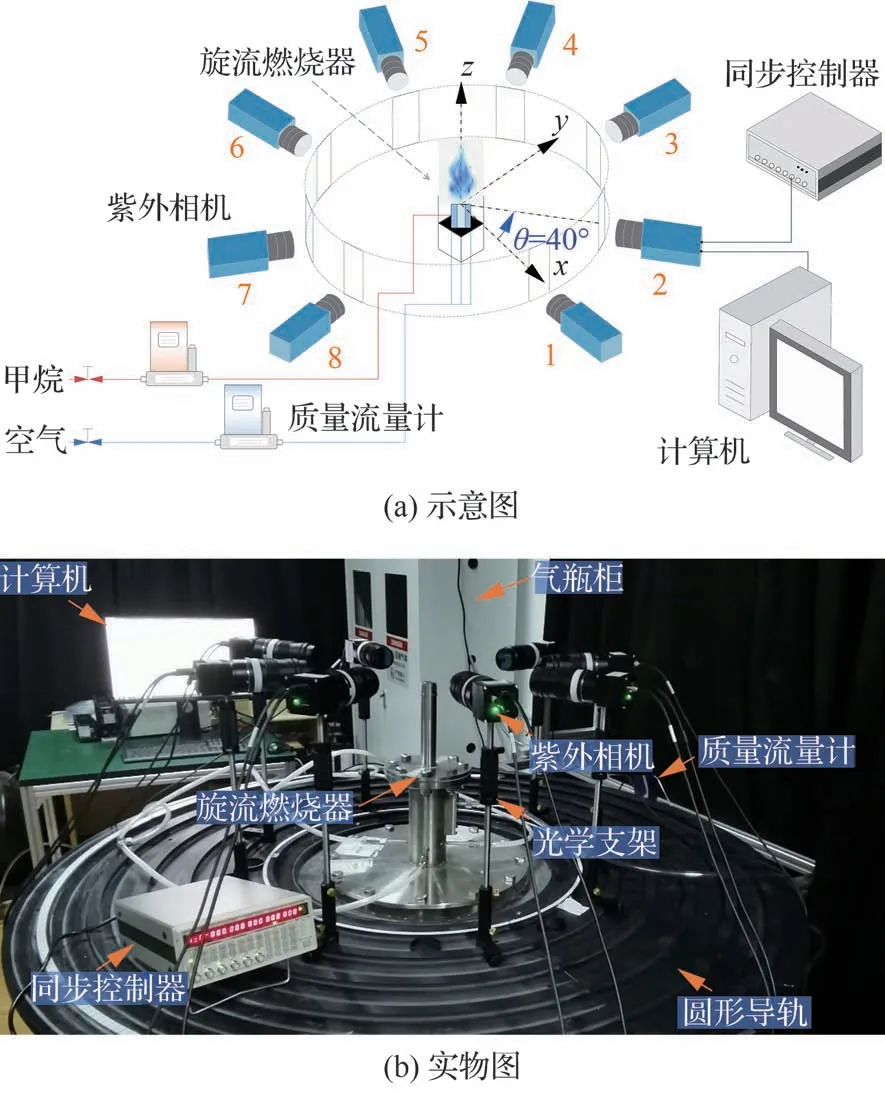
图5 基于多紫外相机成像的CTC系统Fig.5 CTC system based on ultraviolet multi-camera imaging
3 旋流火焰锋面重建数值模拟验证
为评估基于预识别的SART的重建效率和精度,开展了旋流火焰锋面重建数值模拟验证。采用大涡模拟(Large Eddy Simulation, LES)在Fluent平台上获取稳定燃烧的旋流火焰OH*强度瞬态分布三维模型。根据低旋流燃烧器出口实际火焰大小,设置模拟旋流火焰的测量空间为40 mm × 40 mm × 44 mm (x×y×z),划 分体素为100 pixel × 100 pixel × 110 pixel (x×y×z)。模拟获得的旋流火焰OH*强度瞬态结构三维视图和竖直切片如图6所示。
数值模拟的视角布置与构建的基于多紫外相机成像的CTC系统一致,共有8个视角的投影,以旋流火焰为中心间隔40°分布,投影位置与火焰中心距离420 mm。由于数值模拟的正向投影过程中不存在角度偏差、背景噪声和图像畸变,因此可以获得理想的火焰图像。图7为模拟的火焰化学发光投影灰度图像,图像分辨率为220 pixel × 220 pixel。
采用预识别算法优化权重系数矩阵,识别零强度体素788 644个,将权重系数矩阵规模缩小了71.7%,计算耗时减少了68.6%。分别向投影图像中加入10%与20%的随机噪声,进行旋流火焰三维锋面结构反演重建。所用计算机的CPU和显卡配置分别为Intel Core i9-9900K和NVIDIA GeForce RTX 2070,重建总耗时约为1 h。图8为不同噪声情况下模拟火焰OH*与重建火焰的水平切片,沿z轴方向依次间隔6.8 mm。进一步采用相关系数γ量化不同噪声情况下旋流火焰的重建精度,如表2所示。相关系数代表模拟火焰与重建火焰水平切片之间的相似性,越接近1则重建精度越高,计算公式为

图8 不同噪声情况下旋流火焰OH*与重建火焰的水平切片Fig.8 Horizontal slices of simulated flame OH* and reconstructed flame under different noise conditions
式中:J和K分别为模拟火焰与重建火焰的水平切片体素强度矩阵;Cov(J,K)为J与K的协方差;Var为方差。
从图8和表2可以看出,不同噪声情况下旋流火焰的重建结果都具有良好的重建精度。在无噪声情况下,水平切片相关系数最高可达0.994,同时在所有位置处都大于0.9,表明重建结果具有较高的准确性。添加10%随机噪声后,不同位置水平切片的相关系数略有下降,下降最大幅度为0.31% (z=8.8 mm)。进一步添加20%随机噪声后,相较无噪声情况,相关系数下降最大幅度为1.03% (z=8.8 mm),同时最小值仍达到0.9 (z=42.8 mm),表明基于预识别技术的SART具有良好的鲁棒性和抗噪性。从重建精度在空间上的变化趋势来看,水平切片相关系数随着z轴高度的增加而逐渐减小,这是由于火焰面积和褶皱数量随着高度增加而逐渐增大,导致结构复杂度上升,一定程度上影响了对火焰锋面小尺度结构的精确重建。
4 旋流火焰锋面重建实验
4.1 CTC多相机系统标定
开展了基于多紫外相机成像的CTC系统标定实验研究,通过三维空间与二维投影的映射关系,获取多台相机之间旋转角度和位移距离的三维信息,同时获取每台相机的畸变参数用于图像校正。
根据张正友标定法[30],假设投影图像上某一点的像素坐标为(u,v),对应三维空间点的世界坐标为(Xw,Yw,Zw),两者关系为[31]
式中:Zc为火焰到光学中心的距离;dx和dy分别为每个像素在x轴和y轴上的物理尺寸;(u0,v0)为图像坐标系原点在像素坐标系中的坐标;f为相机焦距;R为旋转矩阵;T为位移矩阵;M1为相机的内部参数矩阵;M2为相机的外部参数矩阵。
在张正友标定法的基础上,进行双目相机标定。如图9所示,通过识别黑白棋盘格角点,获取每台相机内部参数、畸变参数和2台相机之间的相对旋转位移矩阵以相机1为基准,沿逆时针方向对多相机阵列进行连续的双目相机标定,标定顺序为1-2,2-3,3-4,…,7-8,8-1,记每次标定的相对旋转位移矩阵为P12,P23,…,P78,P81。标定结果如表3所示,由于数据量较大,仅列出了相机1、相机2和相机3的标定参数。
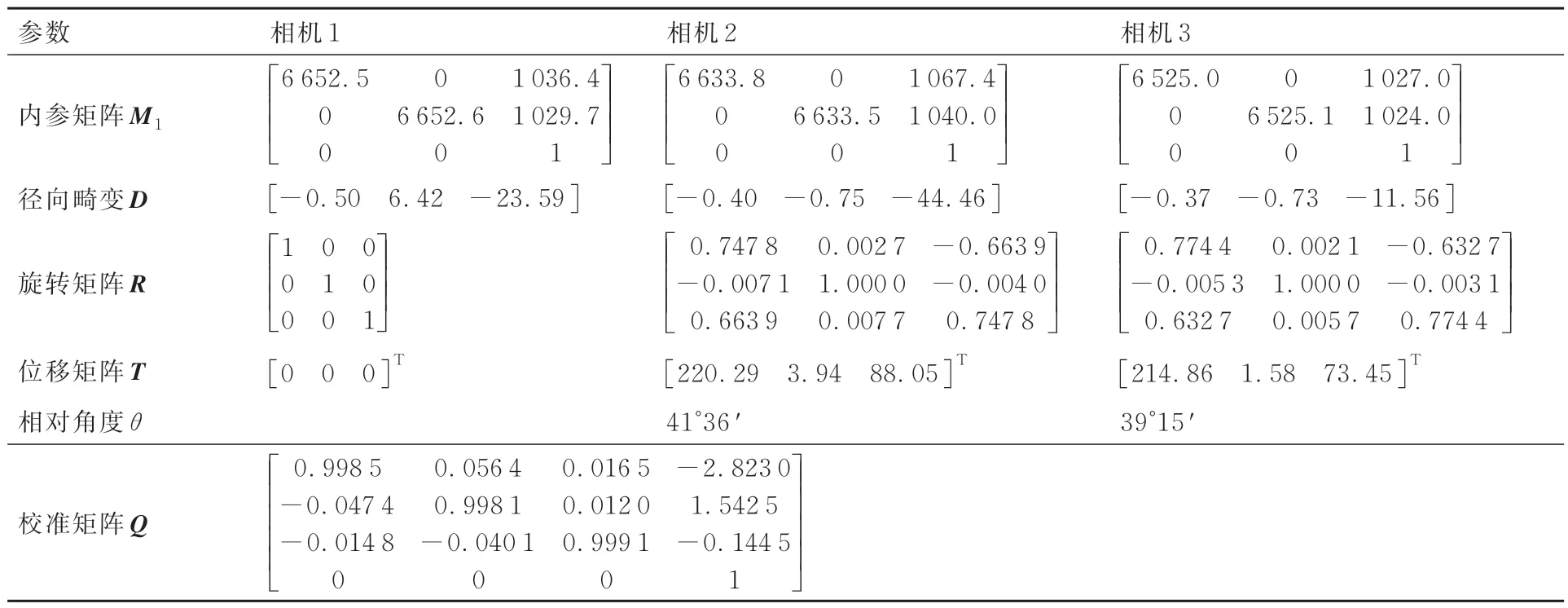
表3 CTC系统参数标定结果Table 3 Calibration results of CTC system parameters

图9 双目相机标定角点识别Fig.9 Corner recognition of binocular camera calibration
定义校准矩阵Q=P81P78…P23P12,即相对旋转位移矩阵的累乘。由于多相机阵列覆盖了火焰周向360°范围,因此理想情况下Q为单位矩阵。但由于标定误差客观存在且在计算中不断积累,Q的结果往往存在一定的偏离。实际标定结果如表3所示,通过Q与单位矩阵的差值计算得到,累计角度偏差为3°32′,在x、y、z轴上的累计位移偏差分别为-2.82 mm、1.54 mm、-0.14 mm,表明CTC系统在旋转和位移2个方面都具有较高的标定精度。
4.2 旋流火焰锋面三维重建结果
在甲烷-空气预混旋流燃烧实验台上开展了旋流火焰瞬态锋面三维重建实验研究。空压机气罐压力为0.6 MPa,空气通过减压阀后的进口压力为0.25 MPa,进口温度为常温。设置空气流量为175 L/min,甲烷流量为10.9 L/min,燃烧当量比为0.59,喷嘴出口流速为5.03 m/s,雷诺数约为9 300。点燃旋流火焰之前,拍摄一组含底噪的背景图像,将火焰图像减去背景图像得到真实的OH*辐射发光投影。图10为CTC多相机系统采集的火焰图像经畸变矫正、降噪预处理后的结果,图像分辨率为250 pixel × 225 pixel。从图10可以看出,旋流火焰整体呈螺旋形,火焰锋面的瞬态结构在旋流作用下存在扭曲、褶皱、破碎等现象。
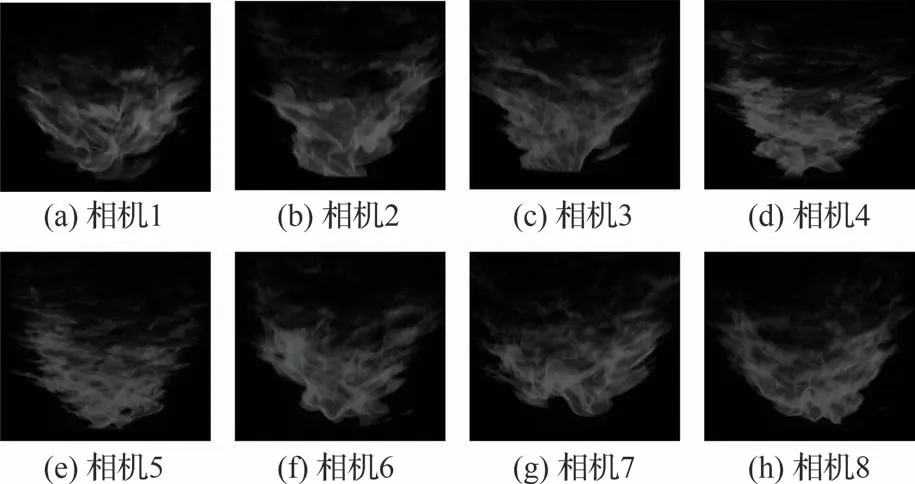
图10 旋流火焰瞬态图像Fig.10 Transient swirl flame image
火焰重建空间大小为50 mm × 50 mm × 45 mm(x×y×z),均匀划分为250 pixel × 250 pixel ×225 pixel的体素,空间分辨率为0.2 mm ×0.2 mm × 0.2 mm。使用预识别技术优化权重系数矩阵,识别零强度体素8 375 551个,将原矩阵规模缩小了59.6%,计算耗时减少了58.0%,旋流火焰锋面重建总耗时约为12 h。图11分别为无预识别和有预识别情况下的三维重建结果。从图11可以看出,无预识别的重建结果中存在明显的伪影,主要分布在测量空间棱线附近,同时火焰锋面周围也存在细小的离散伪影,导致整体视图模糊。加入预识别后,通过排除零强度体素消除了部分伪影,提高了锋面轮廓清晰度,减小了重建误差。从图11(b)中可以看到火焰锋面在旋流作用下呈现涡旋式结构,总体轮廓呈碗形,涡旋尺度随流场发展逐渐增大,随后在流场下游分解成小尺度涡旋,并最终由于湍流扩散和黏性阻尼而消散。
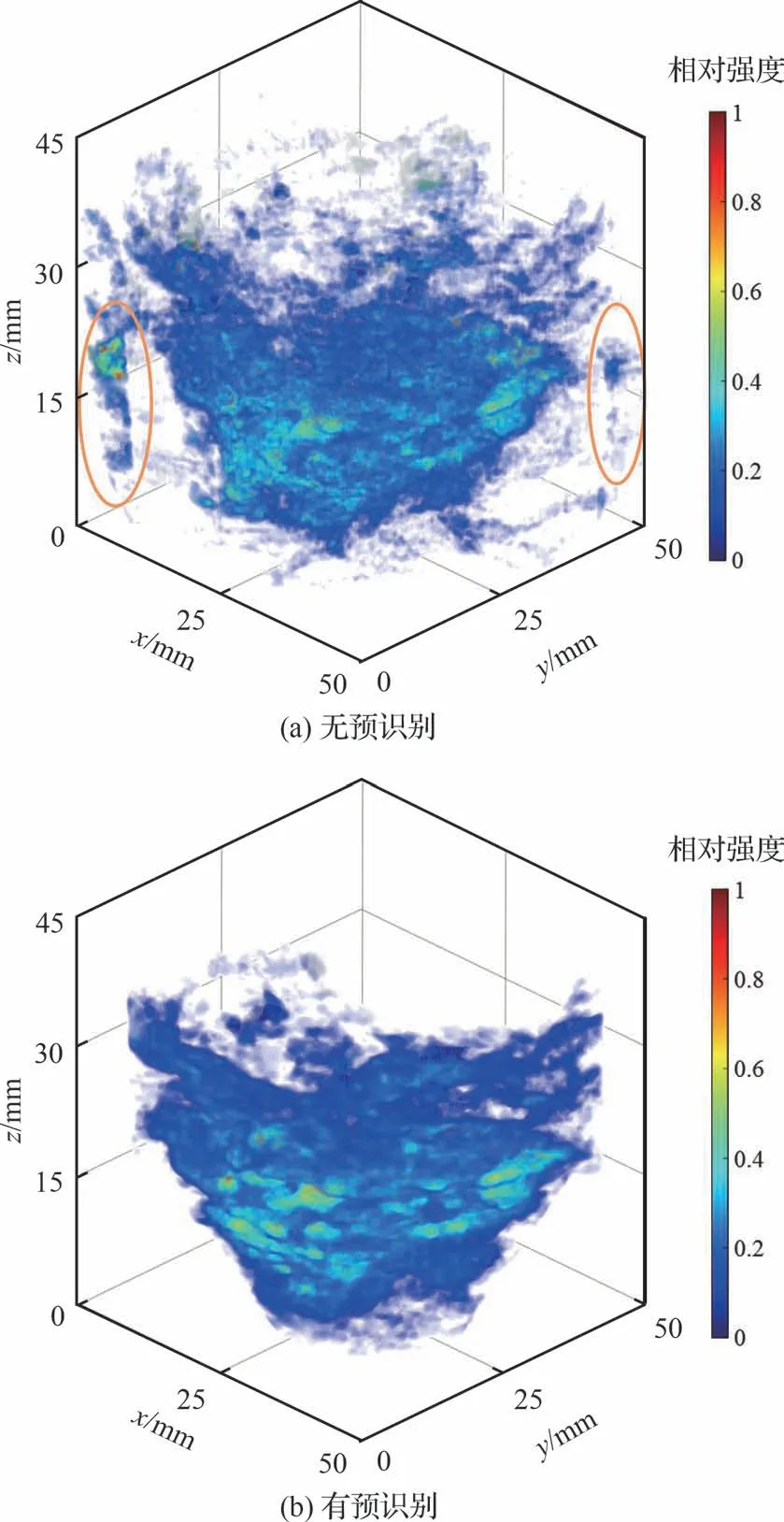
图11 旋流火焰重建结果三维视图Fig.11 3D views of swirl flame reconstruction
图12和图13分别为旋流火焰锋面三维图像的竖直切片和水平切片。从图12可以清晰地观察到环状涡旋的截面形态,火焰截面整体结构呈“V”形。从图13可见,火焰在喷嘴出口处产生扩张,逐渐形成稳定的环状锋面,流场中不存在剧烈的回流区,火焰流场发展情况与Johnson等[29]关于低旋流燃烧的研究结论一致。在z=18 mm水平切片上,火焰中心附近存在较高强度的OH*分布,说明该处存在由逆压力梯度形成的弱回流区。随着火焰流场的发展,燃烧反应释放的热量使得反应速率逐渐提高,最终在z=22 mm处形成了高强度的大尺度涡旋,呈环状分布于剪切边界层。z=26 mm时涡旋直径达到最大,由于旋流速度减小和温度降低,燃烧反应速率逐渐降低,OH*强度下降。

图12 旋流火焰锋面三维图像竖直切片Fig.12 Vertical slices of 3D image of swirl flame
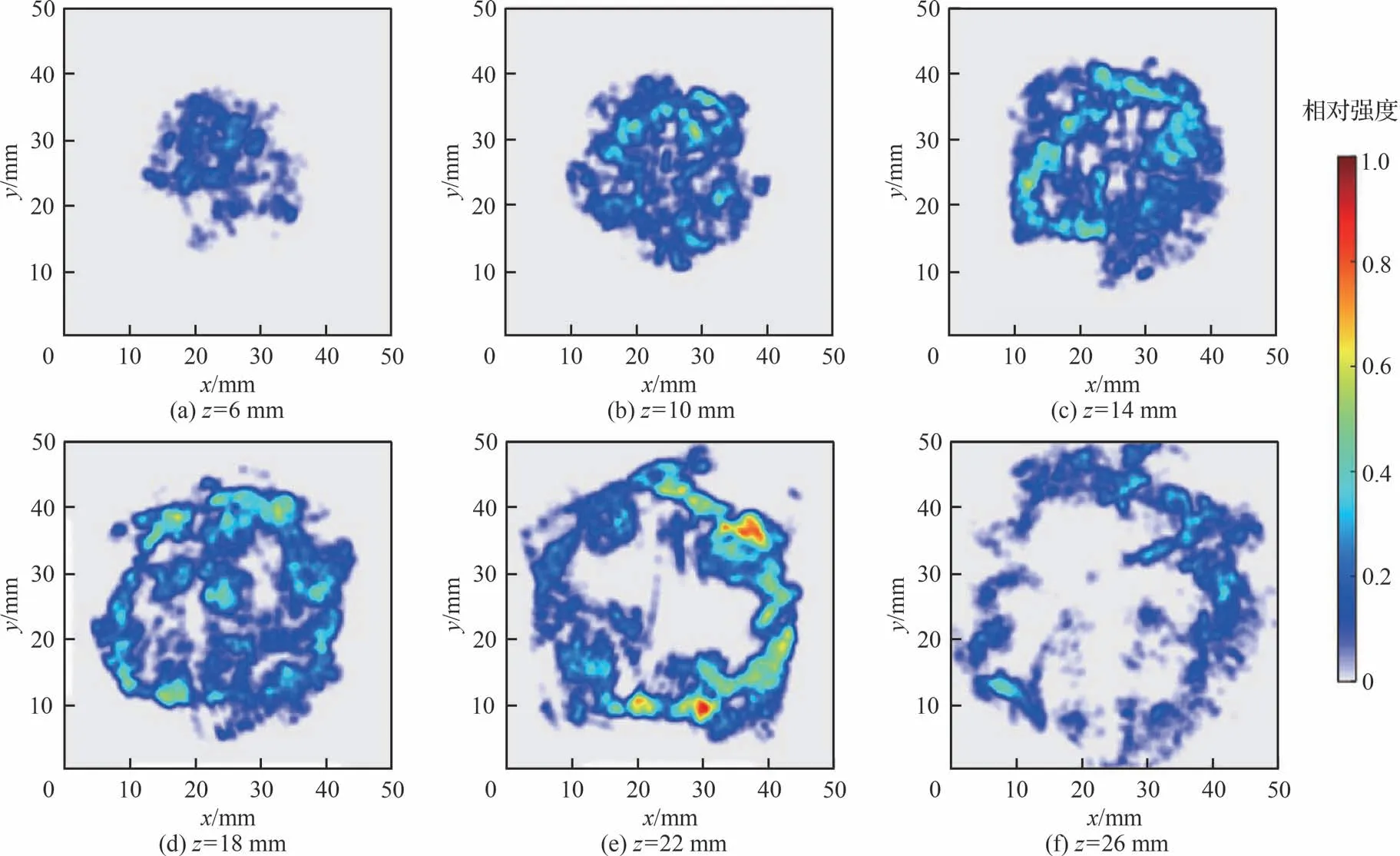
图13 旋流火焰锋面三维图像水平切片Fig.13 Horizontal slices of 3D image of swirl flame
为验证重建结果的准确性,将预识别算法计算得到的三维火焰重建体以相同的正向过程重新投影到传感器平面上,与原始图像进行对比。反投影图像与原图像的平均相对误差和相关系数如表4所示。图14为相机1~相机4的原图像和反投影图像对比以及相对误差分布。从表4可以看出,反投影图像与原图像的平均相对误差均在10%以内,而相关系数均达到了0.97以上,表明了重建结果的准确性。从图14可以看到,反投影图像具有较高的还原度,在细节处重现了原始图像的火焰褶皱,相对误差则主要分布在火焰图像边缘处,这是由于反投影图像的锐度有所欠缺。
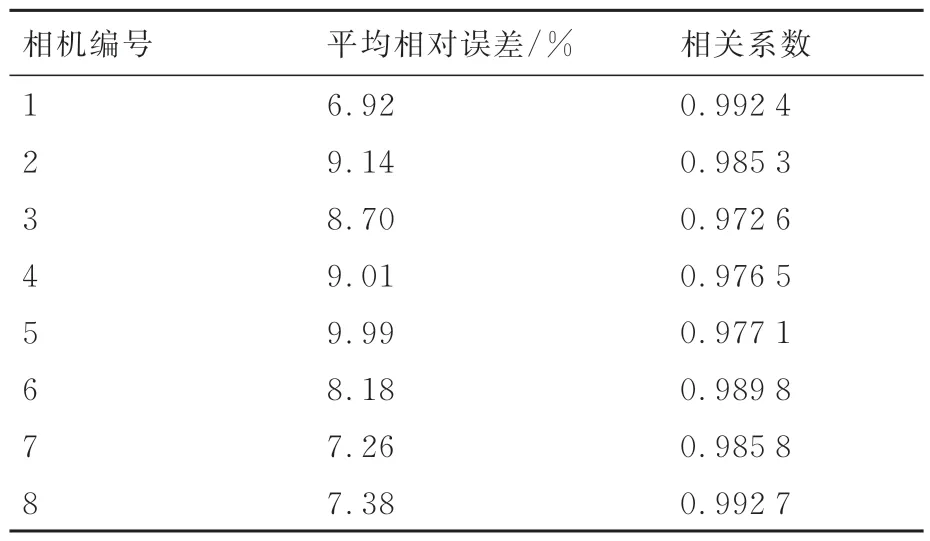
表4 反投影图像与原图像的平均相对误差和相关系数Table 4 Average relative errors and correlation coefficients between inverse projection image and original image
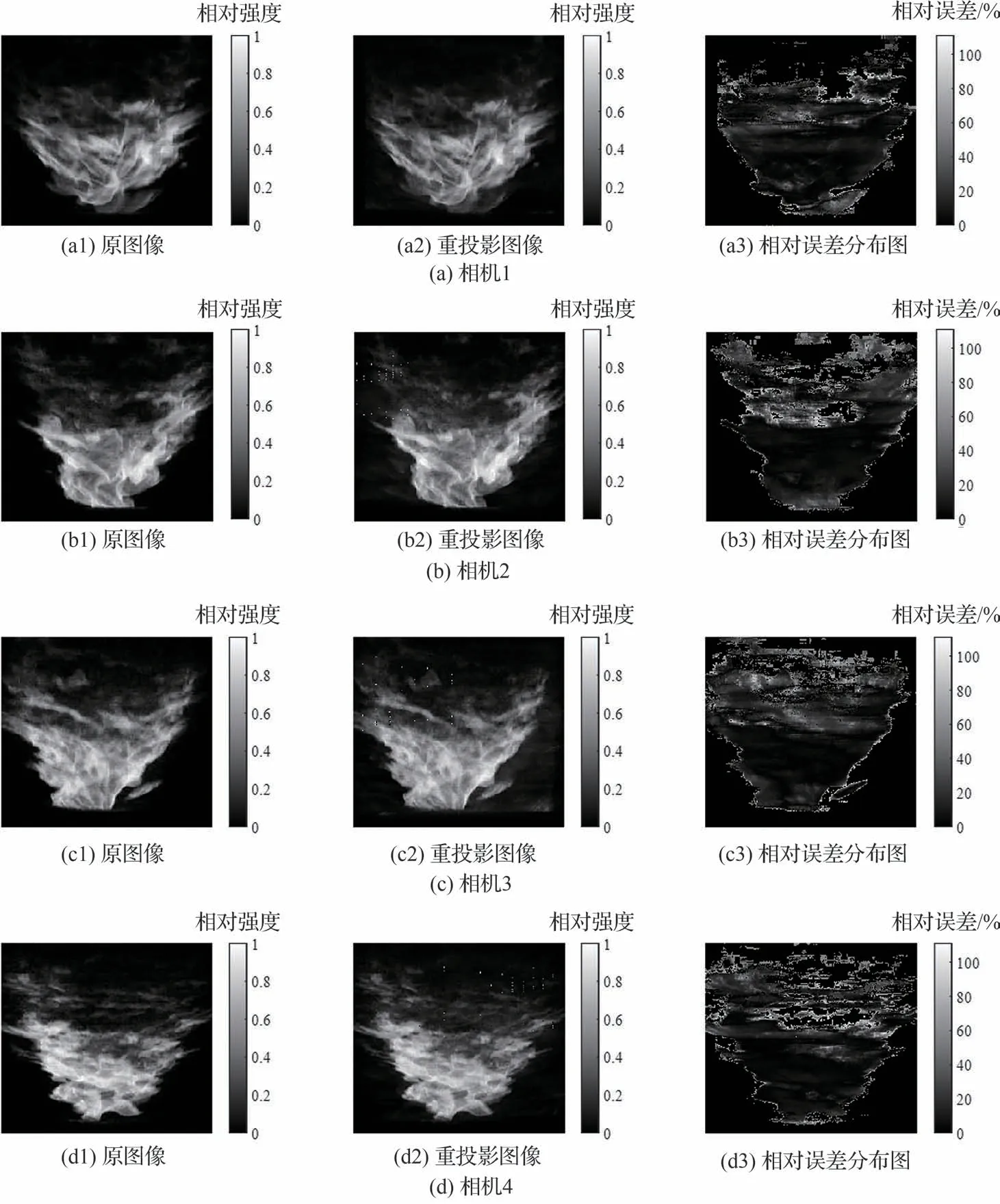
图14 原图像、反投影图像以及相对误差分布图Fig.14 Original image, inverse projection image, and relative error distribution diagram
4.3 当量比对锋面结构的影响
研究了当量比Φ分别为0.47、0.51、0.55、0.59时4种工况下(见表5)的火焰锋面结构特征。不同工况下的瞬态火焰化学发光图像如图15所示。实验中发现,当Φ=0.47时,火焰无法长时间维持稳定,燃烧一段时间后,在没有外力影响的情况下会自动熄灭,其他3个工况下火焰均能长时间稳定燃烧。4种工况的火焰锋面三维重建结果如图16所示。从图16可见,随着当量比Φ的增大,火焰长度与涡旋平均直径逐渐增大,而锋面形态仍然保持碗形。
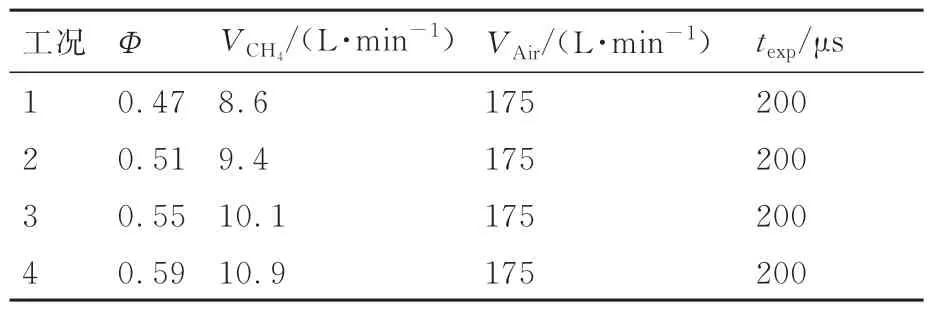
表5 实验工况Table 5 Experimental conditions
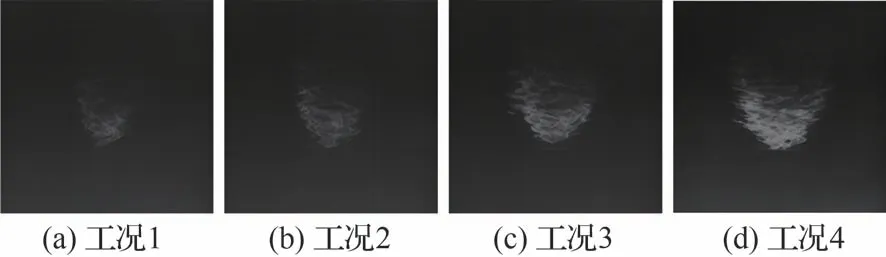
图15 不同工况下瞬态火焰化学发光图像Fig.15 Transient chemiluminescence images under different experimental conditions

图16 不同工况下火焰锋面三维重建结果Fig.16 3D reconstruction results under different experimental conditions
在三维重建的基础上,计算了火焰锋面截面积,以进一步研究当量比变化对流场发展与燃烧反应区分布的影响。火焰锋面重建结果可划分为225层水平切片,每一层均包含L=62 500个体素,沿z轴正方向对水平切片依次编号。在水平切片上,定义火焰截面积S为
式中:σi为水平切片上每一个体素的强度;σt为体素强度阈值,在本小节中设置为最大体素强度的5%;ei用于判断体素强度是否大于阈值。
图17为4种工况下的火焰截面积S随切片位置的变化,横轴为水平切片在z轴上的编号。从图17可见,不同当量比下的截面积曲线表现出相似的特征,呈现倒“U”形,火焰在喷嘴出口处扩张,燃烧反应区逐渐增大,火焰截面积达到峰值后随着流速的降低和反应速率的减小而逐渐衰减。4种工况下火焰面积的峰值分别位于编号60、60、66、78处,当量比增大导致可燃预混气体出口流速增大,火焰推举高度略有增加,主反应区位置随之上升。对火焰截面积曲线求积分得到每种工况下火焰的总体积,具体数值如图17所示。从工况1~工况4,总体积随着当量比的增大呈现逐渐减缓的增长趋势,增长百分比依次为143.0%(1~2)、108.3%(2~3)、14.0%(3~4)。在当量比较低时,火焰流速和预混燃烧反应速率较小,无法为火焰锋面进一步发展提供稳定的热量来源,因此火焰只能在小体积上维持短暂的稳定。随着当量比的提高,稳定条件逐渐改善,使得火焰能够保持规则形状,实现稳定燃烧。
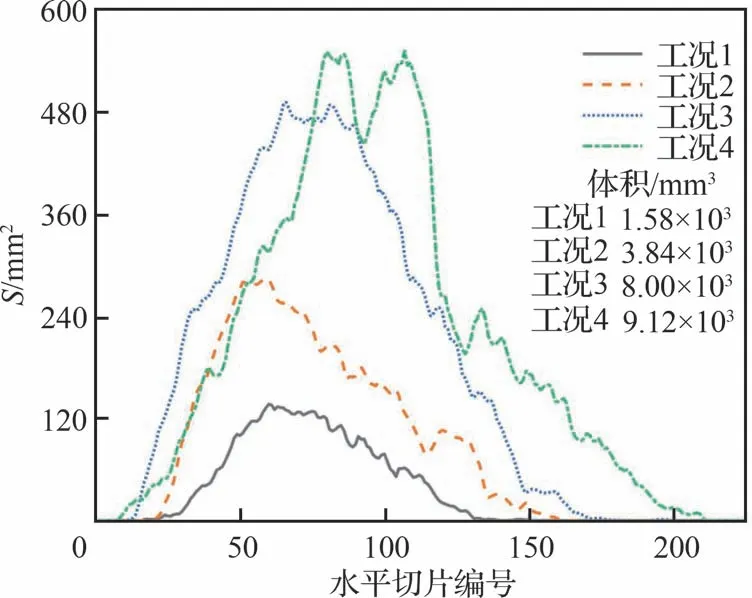
图17 不同工况下火焰截面积 S 变化Fig.17 Change of flame sectional area S under different experimental conditions
5 结 论
1) 构建了基于多紫外相机阵列的CTC系统,实现了低成本、高准确度的旋流火焰瞬态锋面化学发光信息获取。
2) 发展了基于预识别技术的SART,通过光线追踪识别零强度体素,有效减少了计算量和重建伪影。开展了旋流火焰锋面重建数值模拟,结果表明在20%的随机噪声下水平切片的重建精度仍在0.9以上,验证了重建方法具有较高的精确性和鲁棒性。
3) 搭建了甲烷-空气预混旋流燃烧实验台,开展了基于多紫外相机的CTC系统标定和低旋流火焰锋面实验研究,采用反投影方法验证重建结果准确性。结果表明,实验系统具有较高的标定精度,采用预识别技术后权重系数计算量减小了59.6%,反投影相关系数达到0.97以上,重建结果具有较高的准确性。
4) 研究了火焰锋面结构在流场空间中的变化规律。稳定燃烧工况下,旋流火焰在喷嘴出口处扩张,逐渐形成稳定的涡旋状锋面,整体结构呈碗形。随着当量比的增大,火焰长度与涡旋平均直径逐渐增大,而锋面形态仍然保持碗形,同时火焰推举高度略有上升,火焰流速和体积逐渐增大,燃烧稳定性增强。
猜你喜欢
计算机集成制造系统(2022年11期)2022-12-05
家庭医学(2022年3期)2022-04-07
煤气与热力(2022年2期)2022-03-09
海洋通报(2021年5期)2021-12-21
计算机集成制造系统(2020年4期)2020-05-08
福建基础教育研究(2019年5期)2019-05-28
中国惯性技术学报(2019年1期)2019-05-21
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年6期)2016-11-16
油气田环境保护(2015年4期)2015-12-28
