
平台级实体虚拟兵力仿真及应用研究
2023-10-16 15:31曹朋飞邸彦强孟宪国张阳
计算技术与自动化 2023年3期
关键词:数字孪生
曹朋飞 邸彦强 孟宪国 张阳
关键词:虚拟兵力仿真;计算机生成兵力;模型建模;数字孪生
当前,虚拟兵力仿真已成为装备建设、作战研究、军事训练等领域,基于模拟仿真方法开展装备论证、作战运用、军事训练、装备保障、试验鉴定等活动的一项基础性工作。平台级实体虚拟兵力仿真的核心是对装备平台(单兵)动作、分队行动和战术运用的建模与仿真,构建平台级实体虚拟兵力仿真系统,为开展对抗式模拟训练条件建设、作战实验条件建设等提供有力支撑,为红蓝对抗条件下开展模拟训练与推演提供保障,提升训练、实验的实战化与真实感。
平台级实体虚拟兵力仿真研究属于典型的计算机生成兵力(Computer Generated Force,CGF)研究,研究对象为平台级兵力实体及其作战运用。因此,研究内容既涉及多种类型装备的机理仿真,具有机、光、电、液等多学科多专业工程仿真特征,又涉及不同作战行动的仿真,具有典型的战术仿真特征。此外,还涉及战术行动决策行为的仿真,需要智能仿真算法的支撑。虚拟兵力在人机对抗式模拟训练中多采用LVC混合式仿真系统形态与模拟训练系统互联对抗,起到兵力补足以及作战支撑的作用。基于此,以下分别对CGF系统及其仿真平台、虚拟兵力实体建模方法,以及CGF在多态仿真系统构建中的应用和关键技术进行梳理和总结,为构建虚拟兵力模型体系以及虚拟兵力仿真系统奠定基础。
1CGF系统及其仿真平台
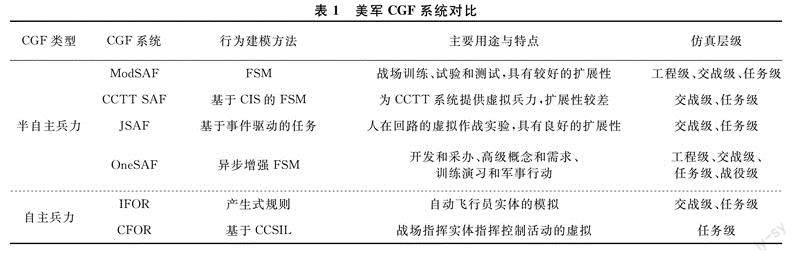
美军于20世纪80年代开始对CGF相关技术进行研究,开发了一系列的CGF系统。ModSAF(Modular Semi-Automated
Forces)是其最早研发的CGF系统之一,主要用于辅助军队进行战场训练、试验和测试,具有较强的扩展性。该系统可支持单兵、连排级作战单元以及武器系统的模型建模,系统中CGF实体模型由物理模型和行为模型组成,物理模型基于动力学建模,行为模型采用有限状态机(Finite State Machine,FSM),基于系统内任务(Task)的概念,完成作战行动的仿真。
基于ModSAF的架构,美军相继研制了美军近战战术训练系统(Closed
Combat
TacticalTrainer, CCTT)的SAF和JSAF(Joint SAF).其中CCTT SAF是针对CCTT系统为虚拟战场提供计算机生成的作战实体或单元,與ModSAF相同,该SAF系统可支持平台级和聚合级实体的仿真,同时采用FSM对实体行为建模,区别是其行为严格基于作战规则集CIS建模且仅为CCTT系统服务,因此扩展性较差。JSAF采用任务和认知架构对其中的虚拟兵力进行建模,通过事件驱动行为过程,可对海陆空等多种兵力进行仿真模拟,具有良好的扩展性。
OneSAF集成了美军已开发的不同系统中的SAF模型功能,是一个可重组的、新一代的CGF系统,可适应多种仿真层级,支持不同领域的建模与仿真。该系统尽可能考虑了建模与仿真领域的各种需求,采用异步增强FSM建模方法,可支持从单兵到旅级规模作战兵力的仿真,是美军CGF未来的发展方向。
以上CGF系统均属于半自主兵力系统,该类CGF系统能够描述底层的兵力行为,对于高层次的组织决策行为,需要真实操作人员通过人机接口协助完成。
相对于半自主兵力系统,美军基于Agent的思想构建了一些自主兵力系统,如IFOR (Intelli-gent Forces)、CFOR(Command Forces)等。IF-OR是基于Soar体系结构所构建的智能兵力模型,主要为空军战术仿真建立了自动的智能A-gent。该系统基于规则和目标驱动,通过产生式规则实现态势评估、行为规划等智能行为建模。在该系统框架基础上又分别设计了FWA-Soar和RWA-Soar系统,分别用于固定翼飞机和直升机作战行为的仿真,在STOW(Syntactic Theater ofWar)计划中取得成功应用。
CFOR项目与IFOR相同,同属STOW计划的一部分,该系统能够抽象出具有指挥能力的实体来负责战场的指挥控制,其指挥实体模型基于指挥控制仿真接口语言(Command and Control Simu-lation Interface Language,CCSIL)描述其指挥行为,可以实现与指挥有关的决策、规划等认知过程,属于完全自主的兵力,美军CGF系统对比如表1所示。
在国内,北京航空航天大学研发了空中威胁CGF系统、地面威胁CGF系统以及通用型计算机生成兵力系统AST-CGF,构建了智能数字飞机模型、地面雷达模型、地对空导弹模型、高炮模型等。陆军工程大学针对防空装备、炮兵装备构建了CGF系统,已成功应用于模拟训练之中。此外还有装甲兵工程研究所的装甲兵CGF系统、军事科学研究院的指挥决策CGF系统等。
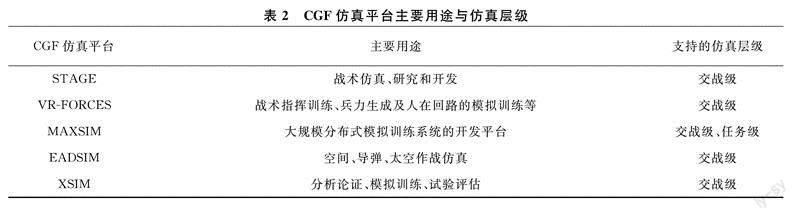
除了CGF系统,还有许多成熟的商业化仿真平台用于虚拟兵力开发和仿真,如STAGE、MAKVR-FORCES、MAXSIM、EADSIM、XSIM等,各仿真平台的主要用途以及仿真层级如表2所示。
2虚拟兵力实体建模方法
虚拟兵力实体建模主要针对作战实体及编队在进攻、防御、抗击等典型作战行动中的行为模型进行建模以及对当前态势下的行为决策模型进行建模,一是建立实体和编队的战术行动模型,二是建立面向不同战场态势的行动决策模型,最终实现红蓝双方虚拟兵力模型的自主对抗。平台级实体虚拟兵力模型的建模通常包含物理模型建模和行为模型建模,其中物理模型建模是指对实体的物理特性进行建模,为实体行为提供基础支撑。行为模型建模是对实体的感知、推理、决策规划以及学习等行为进行建模,其建模程度体现了CGF的智能性。
2.1实体物理模型建模
实体物理模型建模主要包含实体的机动模型、传感器模型、通信模型、干扰与抗干扰模型、弹道模型、杀伤模型等模型建模,描述实体自身的物理特性,往往通过构建其数学模型进行建模。如实体的机动模型建模针对各装备实体在不同地理环境下运动的过程进行建模,包含单个实体的机动过程、多实体编队的形成与保持以及队形变换等。根据应用场景不同,对实体物理模型分辨率的要求不同。对于作战训练,需要大量实体参与仿真,为了满足其实时性,通常构建较为简化的物理模型,即交战级分辨率的仿真模型;对于装备仿真试验、装备性能分析评估等,对实体分辨率要求较高,需与机、光、电、液等多学科多专业结合构建工程级分辨率仿真模型。因此建立兼容交战和工程两级分辨率的仿真模型框架,面对不同需求能够自适应选择适当的分辨率等级,以构建更加灵活的使用模式,是虚拟兵力建模与仿真的一个研究方向。
2.2实体行为模型建模
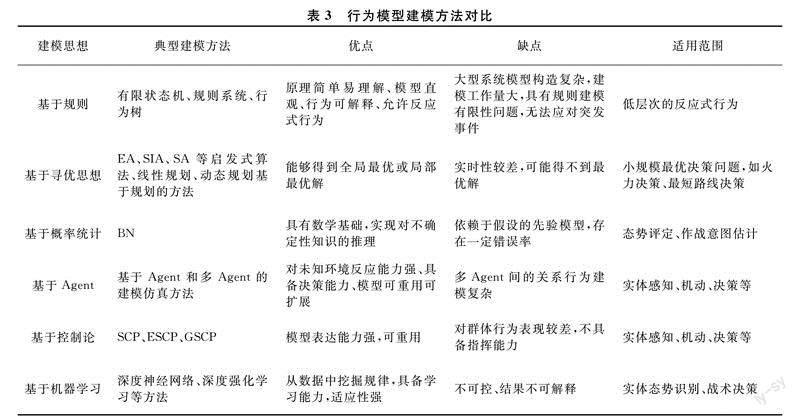
实体行为模型建模是对实体的智能行为进行建模,包含态势感知、决策、规划、记忆与学习以及协同等方面行为模型建模,是构建CGF的核心任务。CGF中实体的行为模型建模方法一直处于发展之中,与人工智能的发展联系密切,如基于规则的有限状态机、行为树以及规则系统等建模方法,此类方法较为成熟且已应用于多种仿真系统,但该类方法基于已知的规则进行建模,存在规则建模有限性问题,无法处理规则之外的行为。
随着人工智能的发展,将进化算法(Evolu-tionary Algorithms,EA)、群体智能优化算法(Swarm Intelligence Algorithm,SIA)、退火算法(Simulated Algorithm,SA)、爬山算法(HillClimbing,HC)等启发式方法引入作战行为模型建模与仿真。该类方法基于直观或经验建模,在预计时间内以求得最优行为决策,其实质上是一种贪心策略,其结果常常会陷入局部最优,且耗时较长。基于寻优思想的方法还包含线性规划、动态规划等可求得绝对最优解的算法和基于博弈论相关理论的博弈算法,由于此类算法计算量巨大,因此只適用于小规模问题,很少应用于工程中。此外将概率理论应用于CGF中的行为模型建模可对其不确定的知识的表达和推理过程进行建模,如CGF的决策过程等,贝叶斯网络(Bayesian Net-works,BN)是该思想的典型方法。
基于Agent和多Agent的行为建模方法是CGF行为模型建模领域研究的热点,该方法基于心智状态BDI(Belief,Desire,Intention)对战场智能体的综合能力进行建模,旨在构建具备自治性、反应性、社会性和主动性的智能仿真实体,当前该方法还在发展中。与该方法相似的是国防科技大学提出的SCP(Sensor Controller Performer)模型,该模型依据控制论的思想从控制系统角度抽象出了实体的行为机构,使虚拟实体对象具备了一定的自主性和独立性,可实现连续和较为复杂的行为。与基于Agent和多Agent的行为模型建模思想相比,SCP具有完整的概念定义、理论体系与方法论。在此基础上,国防科技大学进一步提出了ESCP模型和GSCP模型,前者对单个实体中各组成部分的并发行为进行了优化,后者结合控制论和群体智能思想,使得该模型支持对群体兵力间的协同行为。
近两年,随着机器学习的迅猛发展,相关领域学者开始将强化学习应用于行为模型建模中并取得了一定的成果。如文献[21]将MAXQ与传统的行为树相结合,对行为树中的选择节点进行了优化。将深度学习与强化学习相结合所形成深度强化学习算法应用于行为建模中以提高仿真实体的智能性是当前研究的热点,典型的算法有DQN(Deep Q-Network)、DDPG (Deep DeterministicPolicy Gradient),A3C( Asynchronous
AdvantageActor-Critic)等。在文献[22]中,作者对DDPG算法进行了优化,提出了MADDPG算法用于空战策略生成方法,提升了空战策略的智能化水平。针对虚拟兵力行为仿真过程中所遇到的不同问题,采取的建模方法也有所不同,对各种建模方法进行总结,如表3所示。
3计算机生成兵力在多态仿真系统构建中的应用与关键技术
计算机生成兵力在军事训练中有两种典型应用,一是以构造式仿真系统形态,不同虚拟兵力间进行自主对抗,按照想定和作战方案推演,主要用于指挥训练和作战实验;二是以LVC混合式仿真系统形态,与模拟训练系统互联对抗,主要用于人机对抗式模拟训练。对于后者,一是解决构造仿真模型和虚拟仿真模型间的互操作,二是实现虚拟兵力仿真系统与模拟训练仿真系统的互联互通,构建分布式的异构对抗训练仿真系统。其中主要涉及分布式系统架构、各级模型间的互操作和系统互联等关键技术。
3.1军用仿真系统形态与分布式系统架构
军用仿真系统形态可分为真实仿真、虚拟仿真和构造仿真,简称LVC(Live Virtual
Construc-tion),其中真实仿真(L)是作战人员操作真实的装备系统在逼真的训练环境中进行仿真,如军事演习;虚拟仿真(V)是作战人员通过操作装备模拟器进行仿真,如人在回路的模拟训练;构造仿真(C)是虚拟人操作虚拟装备在虚拟环境中进行训练,如CGF系统。
在训练仿真领域,早期的仿真系统多为针对某装备技能训练的模拟器系统。随着军事需求的发展,未来联合作战呈现出参战力量多元、战场空间多维和作战行动多样等特点,因此产生出“LC”“VC”“LVC”等多种形态架构的仿真系统以适应训练的需要。如图1所示,“LC”仿真系统形态架构为真实仿真与构造仿真相结合,如美军在2016-201 8年度SLATE-ATD项目中,通过SLATE吊舱挂载到实装飞机中实现虚拟兵力的注入,通过5G信号与虚拟兵力进行互连互操作,验证了美军现有战斗机和模拟器加入LVC的能力,以评估SLATE对于空战训练的技术可行性、作战适应性和经济承受能力[26]。“VC”仿真系统形态架构为虚拟仿真与构造仿真相结合,如陆军工程大学建设的旅级规模模拟训练系统是典型的“VC”仿真系统形态。“LVC”仿真系统形态架构为真实仿真、虚拟仿真以及构造仿真三者相结合,基于LVC架构的仿真系统不受地理环境限制,能够解决实装训练中经费、地域、演习频率等问题。典型的应用有美军的“红旗”军演、“北方利刃”(Northern Edge)、“虚拟旗”(Virtual Flag)等。
3.2面向服务的构造式仿真系统虚拟兵力对抗
传统上,构造式仿真应用系统大多采用桌面软件形式,与作战指挥仿真系统、装备论证仿真系统、仿真推演系统等关联,开展完整的作战仿真过程,如OneSAF、VR-FORCES、XSIM等虚兵仿真平台都采用这种形式。随着面向服务、业务中台等思想和技术的发展,基于微服务的形式和软件治理体系,基于云计算、容器的虚兵服务系统是当前的一个研究热点。
面向服务的体系结构(Service-Oriented Ar-chitecture,SOA)能够有效提高仿真系统的可扩展性,降低系统集成难度,提高仿真资源的可重用性,文献[27]中李伯虎团队首次提出了“仿真网格”,它是一种新型的分布协同仿真系统,该系统基于SOA思想将仿真资源服务化,形成了“云仿真”的雏形。文献[28]基于“仿真网格”的研究成果,提出了一种基于云计算理念的网络化建模与仿真平台,即“云仿真”平台,同时提出了“云仿真”模式,能够为用户提供各种建模与仿真服务,为后续研究打了基础。文献[29]中针对SaaS(Software as a Serv-ice)存在的弊端,提出了一种IaaS(Infrastructureas a Service)模式的“云训练”,该模式采用“中心一终端”结构,以桌面云技术为依托,为用户提供基础软硬件资源等训练服务.为面向服务的虚兵服务系统提供了一种新思路。随着微服务与容器等新技术的出现与发展,基于微服务的新型建模仿真架构具备更强的仿真资源互操作性、可重用性与可组合性,是构造式仿真系统未来的一个发展方向。
3.3VC形态的仿真系统兵力成体系仿真
VC形态的仿真系统在兵力成体系仿真中通常采用分布式架构,通過分布交互仿真技术将各虚拟仿真系统与构造仿真系统互联起来,实现多态异构系统间的互通、互联与互操作。目前,分布交互仿真体系结构主要有分布交互仿真技术体系(Dis-tributed Interactive Simulation,DIS)、建模与仿真高层体系(High Level Architecture,HLA)、试验与训练使能体系(Test and Training Enabling Ar-chitecture,TENA)以及多技术体系的混合体系。
DIS通过协议数据单元(Protocol Data Unit,PDU)实现了不同模型间的信息交换,解决网络仿真研究计划中各平台级对象在互联互操作上出现的问题。该体系结构简单、易于实现,但该结构仅支持同类功能仿真应用间的互联互操作,存在交互不完备、适应性较弱等缺陷。
基于DIS的缺陷,HLA为联邦成员制定了标准的对象模型模板(Object
Model
Template,OMT),其联邦成员间通过标准的接口进行互操作。HLA-OMT定义了联邦对象模型(FederationObject Model,FOM)和成员对象模型(SimulationObject Model,SOM),采用联邦执行数据交换格式(Data interchange format,DIF)作为交换标准,为联邦成员提供了公共的数据约定。随后基于该公共对象模型存在的问题进行改进,发展出基础对象模型(Base Object Model,BOM)和HLA EvolvedModular OMT技术,提高了仿真模型的重用性和互操作性,使得HLA实现了应用层和底层支撑环境的分离、仿真系统即插即用以及按需进行联邦的组合配置,但该体系不适用于对实时性要求较高的硬实时应用环境。
TENA是一种更加开放的技术体系,主要应用于装备试验和训练领域等对实时性要求较高的硬实时应用环境。该体系采用逻辑靶场对象模型(Logical Range Object Model,LROM)实现了不同系统之间的模型互操作。LROM使用统一建模语言UML和TENA定义语言TDL对逻辑靶场的接口和协议进行封装,为靶场中的各种训练资源提供了公共的通信语言,提高了试验和训练领域资源的互操作性、重用性和可组合性。
多技术体系的混合体系结构凭借其良好的扩展性和灵活性已成为美军构建LVC训练环境的主要体系架构,该体系架构保持各系统中原有体系,通过公共对象模型和公共网关实现异构系统间的互联、互通与互操作。如美军“MC2002”演习中所用到的JLVC联邦环境使用了DIS、HLA、TE-NA等多种技术体系,实现跨地域、跨机构模拟系统的互联互操作。
3.4LVC形态仿真系统的孪生战场环境构建
随着网络化、信息化、智能化的加速发展,将数字孪生与虚拟兵力相结合,应用于LVC仿真形态下的对抗式训练中,构建基于LVC的孪生战场环境进行红蓝对抗训练是当前的一个研究热点,其仿真架构如图2所示。在该架构中,CGF有两种应用形式,分别为CGF仿真平台中的CGF实体和平台级虚拟兵力系统,前者一方面起到兵力补足的作用,另一方面为平台级虚拟兵力系统提供模型解算服务;后者提供兵力映射和装备动作展示等功能,作为半实物模拟器和实装的孪生虚兵系统,在统一战场环境服务器、统一时钟服务器和状态同步服务器支撑下,其装备动作状态与半实物模拟器、实装保持一致,能够更好地展现对抗式训练过程。
4结论
对于CGF系统与虚兵仿真平台方面,第一,各研究单位相对独立,研发了各自的CGF系统,但由于无统一标准,各CGF系统间无法交互或重用,限制了CGF系统与仿真平台的发展;第二,系统中模型精准度不足,对模型的校核与验证不够充分,尚不能应用于实战。基于此,一方面针对虚兵仿真相关标准进行研究,如实体模型标准以及系统间交互协议标准等;另一方面应整合现有资源,基于标准构建领域内通用CGF仿真平台,平台间能够互联互操作,最终用于实战化推演。
对于虚兵模型建模方面,第一,平台级实体物理模型构建应结合机、光、电、液等多学科多专业,确保模型的精准度与可靠性。在保证模型精准度与可靠性基础上可根据应用环境不同,构建满足工程级、交战级等需求的多分辨率模型。第二,当前学者主要聚焦将机器学习方法应用于虚兵实体行为建模,以提高实体行为智能性,但对于作战训练,单纯的机器学习方法所构建出的行为模型难以解释,与作战规则或真实作战行为还有差距。采用多方法混合可较好地修正这个问题,如将深度强化学习算法应用于行为树等可解释的建模方法,在遵循作战规则基础上对其缺陷进行优化,构建可解释、贴合实际作战的虚兵实体行为模型。第三,应重视对虚兵模型的校核、验证与验收(VV&A),以确保模型的正确性与可靠性。
在应用方面,第一,将虚拟兵力仿真资源服务化,构建基于云计算、容器的虚兵服务系统,以提高系统仿真资源的可重用性与可组合性,同时满足异地训练需求,是当前研究的方向之一;第二,在多体系多兵种联合作战背景下,将数字孪生技术应用于虚拟兵力仿真,构建LVC形态的孪生战场环境,并将其应用于作战训练是虚拟兵力仿真应用的另一个研究方向。
猜你喜欢
图书与情报(2020年5期)2020-12-15
数字技术与应用(2020年10期)2020-12-09
科技资讯(2020年22期)2020-09-23
科技创新导报(2020年16期)2020-08-13
人民论坛·学术前沿(2020年8期)2020-07-30
软件工程(2020年6期)2020-06-21
科技创新与应用(2020年6期)2020-02-29
环球时报(2020-02-24)2020-02-24
软件工程(2019年12期)2019-12-24
山东工业技术(2019年6期)2019-03-27
