
考虑新型MMC 型统一潮流器改进前馈协调控制策略
2023-10-15 07:36广东省机械技师学院林鸿燕胡元君
数字技术与应用 2023年9期
广东省机械技师学院 林鸿燕 胡元君
针对目前MMC 型UPFC 无法同时考虑精度、响应速度和稳定性等方面问题,提出了考虑新型MMC 型统一潮流器改进前馈协调控制策略。首先在分析MMC 型UPFC 结构的基础上,以二维运行平面图及三维空间曲面图为工具,对UPFC 主要构成要素建立潮流模型,以确定各部功率运行范围[1];然后,建立两个前馈控制模块及必要的补偿环节为基础,提出适用于UPFC 串联及并联变换器的前馈协调控制策略,并在复频域和时域中对其进行性能分析;最后,基于PSCAD 建立220kV 双端系统模型进行仿真验证,结果表明本文所提控制策略可在不同工况下有效提升系统的控制速度、稳定性及精度。
为进一步提高电能传输能力及控制性能,基于IGBT的柔性交流输电系统装置(FACTS)发展十分迅速。其中,应用最为广泛的“统一潮流控制器(Unified Power Flow Controller,UPFC)”同时采用串联控制和并联控制,具备电压调节、移相、阻抗补偿以及综合调节等功能,可快速、同步调节输电线路上的有功功率与无功功率,提高电网输电灵活性、稳定性[2]。本文以实现系统高精度、稳定性及迅速响应效果为目标,制定MMC 型UPFC 控制策略。
1 并联变换器MMC1 前馈控制设计
为提高控制环稳定性以及精度,基于电流内环原理,设计两个前馈控制环,且两个前馈控制环分别与ish d轴分量和q轴分量相关。
1.1 ish d 轴分量前馈控制环
前馈输入中包含具有恒定电压Vdc,根据UPFC 工作原理中补偿定律,在充分考虑传输过程中有功功率Ploss损耗情况下,获得有功功率转化方程式如式(1)所示:
有功功率损耗Ploss可反映Vdc波动,通过对PI 控制器分析推导ish参考值,获得方程式如式(2)所示:
根据相量参数,对方程进行假设获得如式(3)所示:
通过并联变换器侧电阻Rsh推导瞬时功率损耗得到如式(4)所示:
单相电感的瞬时功率如式(5)所示:
三相电抗器功率如式(6)所示:
计算并联变换器注入直流侧的瞬时功率如式(7)所示:
并联变换器可提供的瞬时功率如式(8)所示:
根据能量守恒定律,推导并联变换器传递有功功率平衡方程如式(9)所示:
对式(7)-式(9)进行结合,根据基尔霍夫电流定律得到电流平衡方程如式(10)所示:
电压V1 由ishq分量决定,为保证V1 恒定,设ishq为恒定常数,ΔIsh=Δishd,推导出Vdc关于ishd分量传递函数表达式如式(12)所示:
当传递函数零点、极点以及开环增益均为常数,零点只与并联变换器输入电阻相关,有利于电流内环、电压外环设计,如图1 所示。
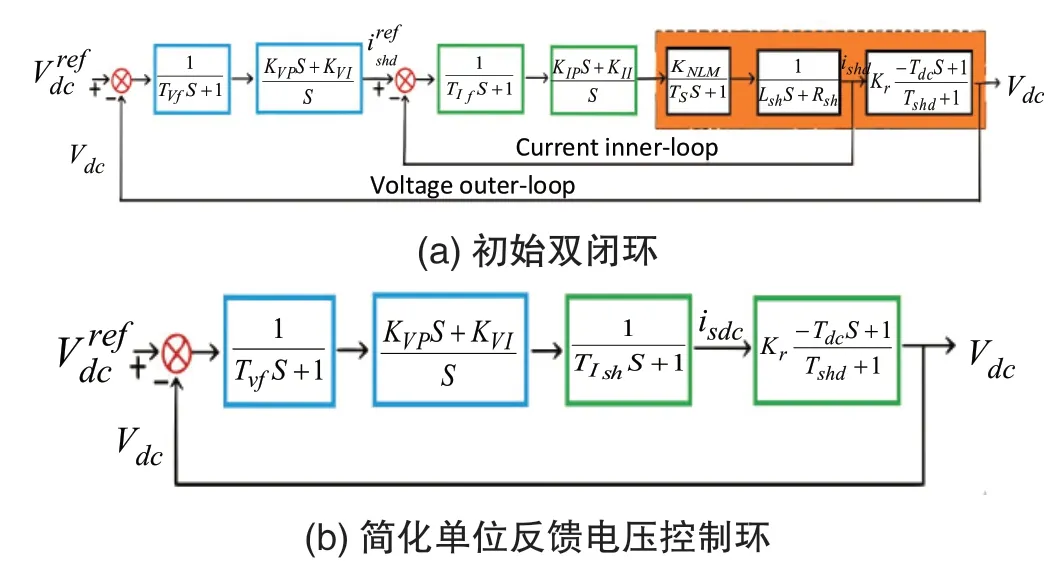
图1 并联变换器双电压控制环Fig.1 Dual voltage control loop for parallel converters
为便于设计,现将内部电流控制环简化为一阶惯性环节,可得函数方程如式(13)所示:
由于电流内环带宽与基频远大于电压外环参数,所以该简化不会造成明误差。
假设时间常数TIsh=L1/KIp,简化设计获得如图1(b)所示,函数方程如式(14)所示:
对公式(14)进行进一步简化,设KVp/KVI=Tp,KshV=KTKVI,Tp=Tshd,进行合并,获得数学模型如式(15)所示:
闭环传递函数是典型的二阶振荡模型,按以上过程作相应推导,得到如式(16)所示:
参数KshV、ωn代入计算得出结论:电压前馈控制环性能与ishd有关。
1.2 关于ish q 轴分量前馈控制环
根据UPFC 结构,获得无功功率平衡方程如式(17)所示:
Q1s与Qsh分别代表发送端大宋无功功率和并联变换器吸收无功功率,假设V1保持不变,在d-q旋转坐标系下进一步推导功率平衡方程如式(18)所示:
考虑存在Q2+QZr=Qr关系,可通过PI 控制器对接收端阻抗QZr无功功率损耗进行补偿,而接收端Qr无功功率与通过PI 控制器ishq轴分量关系因素,故将其作为前馈控制输入,如式(19)所示:
简化获得如图2 所示。
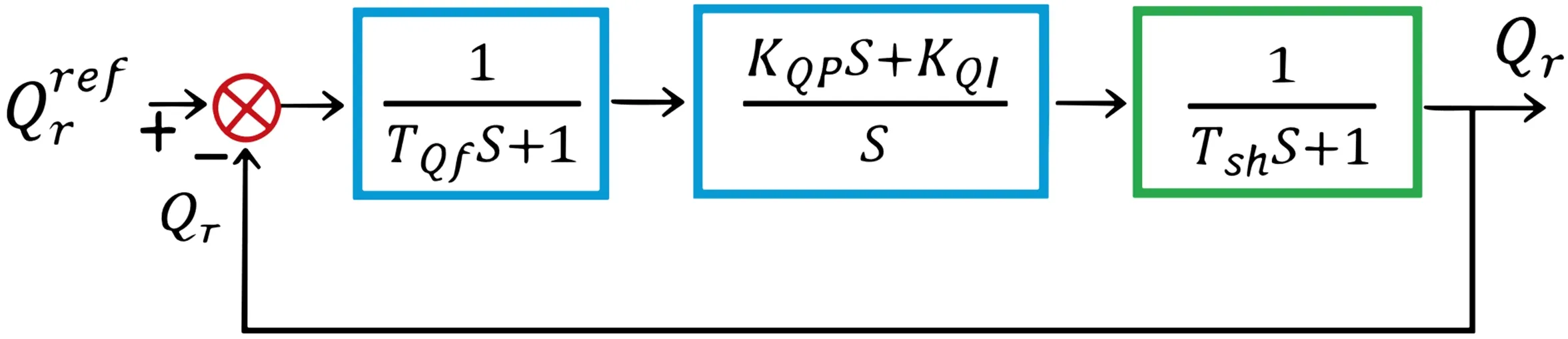
图2 并联变换器单位反馈无功控制环Fig.2 Unit feedback reactive power control loop for parallel converters
假设KQP/KQI=TQf,消除一对零极点,获得开环传递函数如式(20)所示:
闭环传递函数如式(21)所示:
前馈无功控制环性能与ishq有关,在前馈控制基础上,可得并联变换器控制策略。
2 串联变换器MMC2 前馈控制环设计
2.1 V12 d 轴分量前馈控制环
根据基本控制策略,对与V12d轴分量和q轴分量相关前馈控制环进行设计。在d-q旋转坐标系下列出串联侧总线2 无功功率表达式如式(22)所示:
通常V1与Vr幅值及相位之间差值较小,由此可推导2V1-vrd>>vrq。考虑Q2的主要影响因素为v12,因此,通过控制v12来控制Q2较为可行。
Qsh无法实现无功功率Q12控制,且Qsh对Q2影响较大,Qsh对保持V1恒定起到决定性作用。因此,需寻求控制V1为v12d提供参考值的其他方案,如式(23)所示:
通过3/2 变换得d-q旋转坐标系下的电压方程如式(24)所示:
根据式第一部分,设计V12d的PI 控制环如式(25)所示:
简化获得如图3 所示。

图3 串联变换器单位反馈前馈控制环示意图Fig.3 Schematic diagram of unit feedback feedforward control loop for series converter
2.2 关于V12 q 轴分量的前馈控制环
对V12q轴分量前馈控制环进行设计。经过3/2 变换,一般情况下vrd>>vrq,与v12d相比,v12q变化对P2的影响更大,因此,选择P2为v12q提供参考值更为合理、准确。针对接收端阻抗Pzr有功损耗因素,采用PI 控制器进行补偿,关系式为P2+Pzr=Pr,Pr代替P2,如式(26)所示:
依法推导v12q前馈控制环开环传递函数与闭环传递函数如式(27)、式(28)所示:
3 结语
通过对部分基本参数进行假设,完成控制策略的特性和性能分析,在正常作业环境下,为保证较好波形以及响应速度,电流内环阻尼系数应保持在0.7071,且电压外环基本频率为314.159(该频率与电网频率相同),使控制器与交流电网间交互更加平顺。
猜你喜欢
山东冶金(2019年3期)2019-07-10
测控技术(2018年7期)2018-12-09
消费导刊(2018年10期)2018-08-20
光学精密工程(2016年4期)2016-11-07
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
通信电源技术(2016年5期)2016-03-22
电测与仪表(2014年11期)2014-04-04
