水下长鳍波动式MPF推进模式机器人研究现状与发展趋势
2023-10-14 07:51丁乐涵马恺君王希卓解文达高建设
机械工程师 2023年10期
丁乐涵,马恺君,王希卓,解文达,高建设
(郑州大学机械与动力工程学院,郑州 450000)
0 引言
在水下仿生鱼类机器人的研究中,主流的研究方向共有两个方向,对应着鱼类两种推进模式,即身体和/或尾鳍(BCF)的推进模式和中鳍和/或成对鳍(MPF)的推进模式[1]。BCF推进模式的研究要早于MPF推进模式的研究,1994年美国麻省理工学院最早通过研究制作出了全世界第一条真正意义上的仿金枪鱼机器人“Robotuna”(如图1),以此开启了水下仿生机器人研制的里程[2]。

图1 仿生金枪鱼机器人
但随着研究的深入,BCF推进模式稳定性差、机动性差的实验结果不断暴露出其模式上的缺陷,于是有学者开始对MPF推进模式进行了研究,最早的应该是2001年英国哈利尔特-瓦特大学为了研究波动性MPF游泳,开发了“鳍执行器”[3]。较早的为日本大阪大学,自2002年开始了此类的数值研究[4],并于2011年详细地论述了模型机的研制过程(如图2)[5]。

图2 仿生墨鱼机器人
到了2013年,王田苗等[6]又将MPF模式按照推进方式的不同,分成了多鳍拍动式、胸鳍扑翼滑翔式和长鳍波动式3种,其中长鳍波动鱼类通过单侧或多侧波动鳍产生的推进波来推动躯体,其生态原型为自然界中的秋刀鱼和黄貂鱼等水生生物,它们通常以波动鳍的方式游动。本文针对长鳍波动式MPF推进模式的研究现状与发展进行分析,对其原理、结构、材料、流体力学方面进行了总结与分析。
1 研究现状
1.1 原理部分
在水下长鳍波动式MPF推进模式机器人的原理研究方面,斯特劳哈尔数(Strouhal数,以下简称St数),作为衡量机器动力学特性的重要指标之一,一开始便运用到了仿生鱼类机器人推进效率及推进系数等动力学特性的研究当中,而St数与另一个重要参量雷诺数具有密切的关系,两者常常作为该领域实验研究的重要衡量指标。
St数在国内较早应用于仿生鱼类机器人的是在2007年河海大学学者王亮所进行的仿生鱼群自主游动及控制的研究中。他通过数值模拟得到了二维仿生鱼自主巡游时St数与雷诺数的关系(如图3),并探究了这种关系与推进效率、推力系数等动力学特征在中小型鱼类与海豚间的差别[7]。开启了利用St数研究仿生鱼类机器人的先河。

图3 自主模式巡游时雷诺数与斯特劳哈尔数的图像
若要开展对于水下长鳍波动式MPF推进模式的仿生AUV的研究,必然要研究其原型魟鱼,但鱼类自主游动中推力和阻力无法区分的局限性问题一直难以解决。
2012年国内学者王亮、陈宗芳等[8]在研究鱼游水动力学特性时,通过对推力和阻力进行重新定义,彻底扫除了鱼类自主游动研究中阻力和推力难以辨别的障碍。而后又模拟了以鲹科模式在黏性和无黏流体(雷诺数无穷大)中的鱼类自主游动,得出了St数随雷诺数变化的曲线(如图4),证明了鲹科模式在高雷诺数下的推进优势。这一研究方法为研究魟鱼的鱼游提供了新的思路。

图4 在一定雷诺数范围内St变化的函数图像
由于当时St数与水下长鳍波动式MPF推进模式机器人相结合的研究经验与案例寥寥无几,以至于往后10年左右的时间里,在该方面St数的分析研究少之又少。直到近年来有学者在胸鳍材料的选择上再度应用St数。
2019年哈尔滨工程大学者刘葳兴利用ABS柔性材料制作胸鳍进行实验,并绘制其推力系数和升力系数的时历曲线(如图5)。通过统计与分析,推进效率与St值以及与平均推力系数的对应关系被研究人员成功总结得出。研究表明,使用合适的柔性材料制造的仿生胸鳍比刚性材料制造的在推力和效率方面都有显著提升。实验中,获取到的最佳St值约为1.3,与Lauder等[9]针对蓝鳃太阳鱼胸鳍巡游时的St值的实验结果十分接近,进一步佐证了实验的准确性[10]。由此可见,若想获得动力学上仿生胸鳍的最优解,St数的引入在实验研究中必不可少。
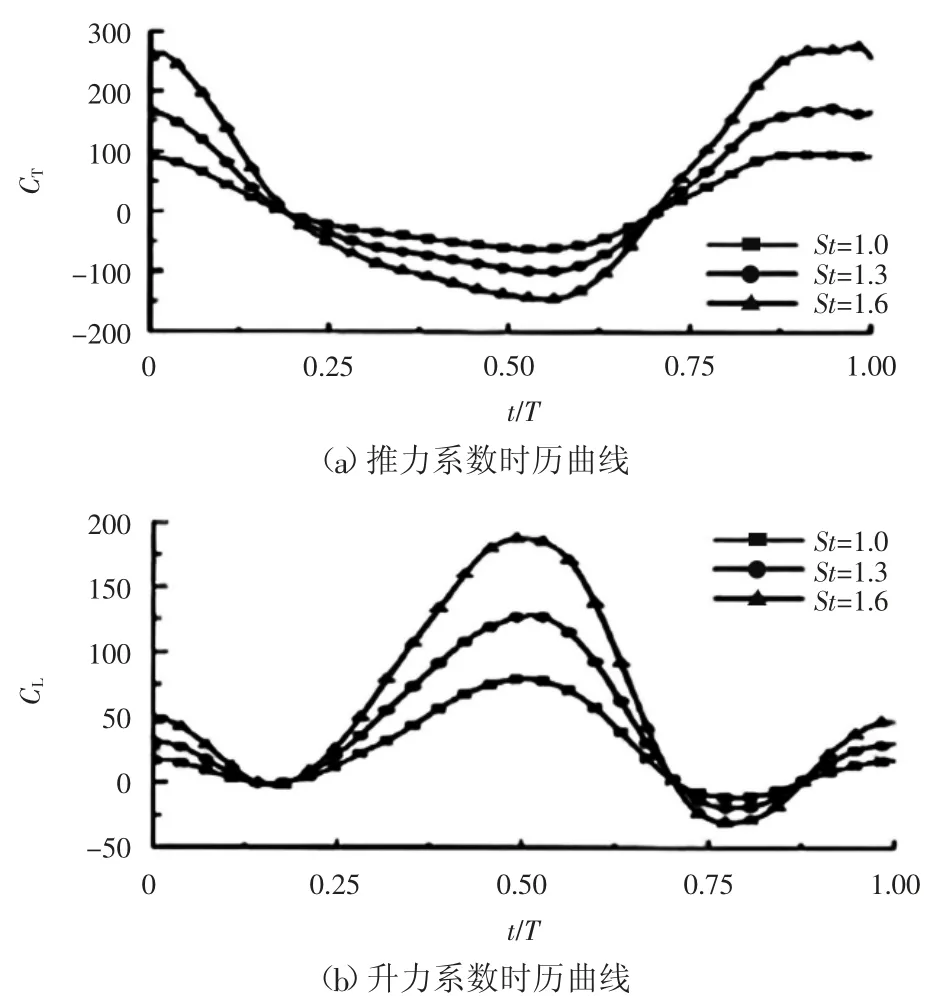
图5 不同St值下水动力系数随时间的变化
1.2 结构部分
在水下长鳍波动式MPF推进模式机器人的结构研究方面,存在多种结构的研究与开发。其中一种结构就是单侧鳍开发,这种结构一般竖直放置,模仿鱼类的背鳍。2001年英国哈利尔特-瓦特大学最早开发了“鳍执行器”,这是一种基于硬骨鱼鳍结构的实验装置,利用平行波纹管 执 行 器(PBA) 作 为“鳍射线”单元(如图6)[3]。

图6 鳍执行器
2003 年,美国西北大学模仿裸背鳗科“黑魔鬼”的长臀鳍波动推进模式,设计出了带状鳍推进器(如图7)[11]。鳍条采用刚性结构与柔性材料结合,可以使连接鳍条的平面实现定点摆动运动。

图7 鳍条驱动器
另一种结构是对双侧鳍的开发,这种结构一般左右两侧对称放置,模仿了鱼类的胸鳍。2002年日本大阪大学在进行数值研究后,就首先提出了一种机械结构,这种结构的两侧都有16个伺服马达单元(如图8)。每个伺服电机是由一个远程计算机单独控制,以进行任何类型的鳍的运动[12]。由于两侧均布驱动后机器的稳定性更好,因此在往后其他学者的研究中,都倾向于这种结构的研究。

图8 日本大阪大学对双侧鳍的开发
2009年国防科技大学利用多直鳍条的原理,研发制作了水下仿生机器人“Cownose ray I”(如图9),该机器人由8个直接连接的双台3003伺服电动机提供动力,工作单元和电动机和鳍条之间的接头都是模块化的[13],在结构上简化了两侧驱动的数量。
图9 牛鼻鲼-Ⅰ机器人
2010年新加坡南洋理工大学的研究人员开发出了“RoMan-II”仿生蝠鲼试验样机(如图10),机身两侧均匀安装有6 个柔性鳍条,以此来驱动双面鳍,即两侧类似扇形的单面鳍[14]。
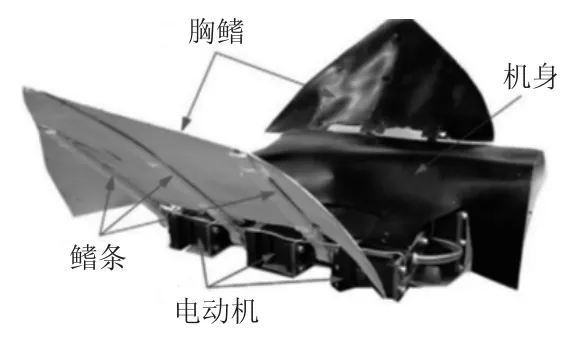
图10 仿生蝠鲼试验样机
2016年Michael Sfakiotakis等[15]研制了一种带有一对横向安装的鳍推进器(如图11),其鳍片长度相等,每条鳍片由两个2 mm厚的飞机级铝矩形板组成,薄膜通过4 对螺母和螺栓固定在它们之间。

图11 鳍推进器
研究过程中存在几种不常见的结构开发,一种是2006年国防科研大学谢海斌[16]的四鳍正交平行配置结构设计(如图12),其控制系统采用多波动鳍推进;还有一种是2015年南京航空航天大学的环绕式鱼鳍开发,这种结构由12个伺服电动机均匀分布一圈带动仿生鱼鳍摆动(如图13)[17]。
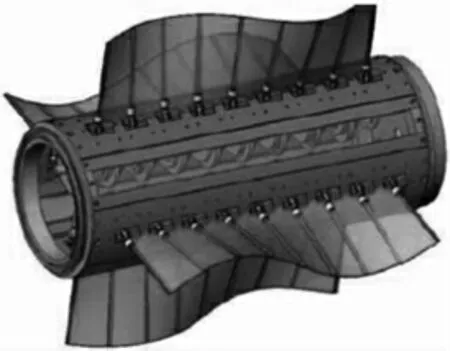
图12 多波动鳍推进模型

图13 环绕式鱼鳍开发
除了将每个鳍条都赋予单独驱动的结构外,还有一种“单一驱动——机械传动”的结构方案。2003年国防科技大学的研究人员开展了由单节模块组成的波动致动机构的理论研究[18],整个机构通过直流伺服电动机来驱动长轴为各个模块传递转矩,以此来控制仿生鳍波动的方向和频率(如图14)[19]。
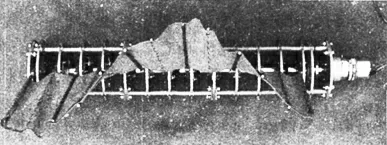
图14 “单一驱动——机械传动”的结构方案
近年来(2018至今),大多数对于水下长鳍波动式MPF推进模式机器人结构研究的方面也与前人相差无几。2018年中南大学设计了仿生执行机构模型,一侧由五根长短不一的鳍条组成(如图15)。当装置处于运动状态,各鳍条以某种函数形式上下摆动,当各鳍条运动形成特定相位差时,在胸鳍上就构成了正弦或非正弦的波形[20]。
2020年湖南大学也设计研发了一种致动机构,这是典型的“单一驱动——机械传动”的结构,有效减少了驱动件的数量(如图16)。该致动机构采用了鳍条致动单元组合的模式,以此来实现鳍条带动鳍面的波动运动,该结构下装置的运动可仅由单个电动机驱动来实现,心轴的轴线即为波动鳍的基线[21]。

图16 致动机构
2021年西南石油大学提出了一种新的波动式推进器,它由七条鳍条和一个弧形鳍线表面组成(如图17),为了产生平滑连续的推进波,每个翼线的一端由伺服电动机单独驱动,另一端牢牢固定在弧形翼线表面的内边缘[22]。与刚提出时的结构相比,该结构减少了驱动电动机的个数,但又保持了足够数量,使得其既足够产生预期波的同时变得更加简捷高效。可见目前研究的趋势正向着结构简单、运动高效的方向发展。
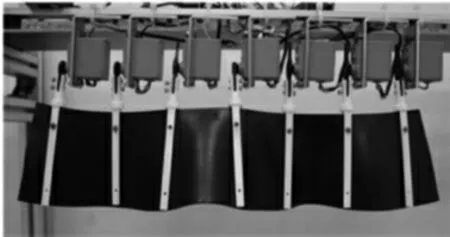
图17 新的波动式推进器
1.3 材料部分
在水下长鳍波动式MPF推进模式机器人的材料研究方面,主要针对机器人的壳体和波动鳍的材料进行研究。其中波动鳍又连接部分(鳍条)和蒙皮构成,对于这两部分材料的研究也尤为重要。
在国内材料研究中,2006年国防科学技术大学学者徐海军[23]提出柔性长背鳍波动仿生装置鳍面材料的选择问题,他的研究表明,目前可以选用的鳍面材料仅限于柔性橡胶蒙皮和乳胶蒙皮。
2008年国防科技大学的杨少波等[24]参照牛鼻鲼的特征,设计出了牛鼻鲼-I。其应用铝合金薄板制作鱼底板,舵机安装在鱼底板,由不锈钢材质的细长光轴作为鳍条,外加成型硫化硅橡胶作为胸鳍表面材料。
自2005年起,北京航空航天大学的研究人员通过对MPF推进方式机器人的研究,研制了一系列由玻璃钢制成的机体和由碳纤维和硅胶板构成的胸鳍组成的样机。
哈尔滨工业大学同样也进行了一系列关于MPF推进模鱼类仿生学研究,王扬威等[25]设计出了仿生蝠鲼机器鱼,该样机利用SMA形状记忆合金材料来制作驱动部分,以聚乙烯材料组成外壳,以及由形状记忆合金固连柔性蒙皮而形成的胸鳍部分(如图18)。

图18 仿生蝠鲼机器鱼
2014年哈尔滨工业大学进行了进一步的研究,哈尔滨工业大学学者高帅[26]利用硅胶高弹性、高柔软度的特点制作仿生波动鱼鳍,并使用ABS工程塑料作为鱼鳍模具灌注硅胶。但硅胶抗张强度和抗撕裂强度等力学性能较差,且吸附能力强,不利于长期使用的问题仍有待解决。
2015年南京航空航天大学谭进波[27]对仿生机器魟鱼的鳍膜材料进行了一系列细致研究后认定低弹性模量的轻质非金属材料是优先考虑的对象,其中包括橡胶、高弹性硅胶等。并在最终选择采用薄乳胶膜来制作鱼鳍。但橡胶本身所具有的一些寿命问题仍然存在。
在国外的研究中,2002年,日本名古屋大学设计了一套仿乌贼波动水下机器人,其中驱动部分采用了人造肌肉(如图19)。

图19 波动鳍微型推进器
2007德国Festo 公司成功将人工肌肉研究成功,仿生蝠鲼样机(如图20) 便应用了此项技术,其采用气动肌腱驱动[28]。

图20 Subsea glider
近年来(2018至今),水下长鳍波动式MPF推进模式机器人的材料研究方面并无大的区别。2020年湖南大学学者邓亚妮[29]考虑到鳍面保证波形的同时对于柔韧性和柔软度的要求,选用厚度较薄的硅胶作为鳍面材料,鳍条材料选用不锈钢。
2021年山东建筑大学学者朱宝星[30]采用密度较小的聚酰胺材料制作鳍条,采用硅胶制作鳍面。聚酰胺的使用使得机器动力损耗大大降低,但其吸水性和线膨胀率很大,浸泡后易变形,从而影响使用。
2022年国内学者王崇磊等[31]在探索仿生柔性鳍波动推进的水动力性能的过程中使用硅胶板作为波动鳍材料,满足密度小、延展性高、表面疏水的要求。而西南石油大学设计的长鳍波动机器人弧形鳍线表面由丁腈橡胶制成,由3D打印机使用光敏树脂制造鳍射线。在材料研究的方面正朝着性能化、自定义化的方向发展。
1.4 流体分析
在水下长鳍波动式MPF推进模式机器人的流体分析研究方面,主要集中在数值研究方面,其使用的数学方法更加多元化,建立了多样化的数学模型和流体力学模型。
2002年日本大阪大学使用了CFD求解计算出鳍状平板端部周围流体的运动,并与非黏性计算进行了比较,证实其有效计算出两侧鳍状平板端部流体的运动,得到了侧鳍流速、压力分布等数据并考察了其与推力的关系(如图21)[32],为后人使用CFD分析长鳍波动并结合实验分析验证提供范例。
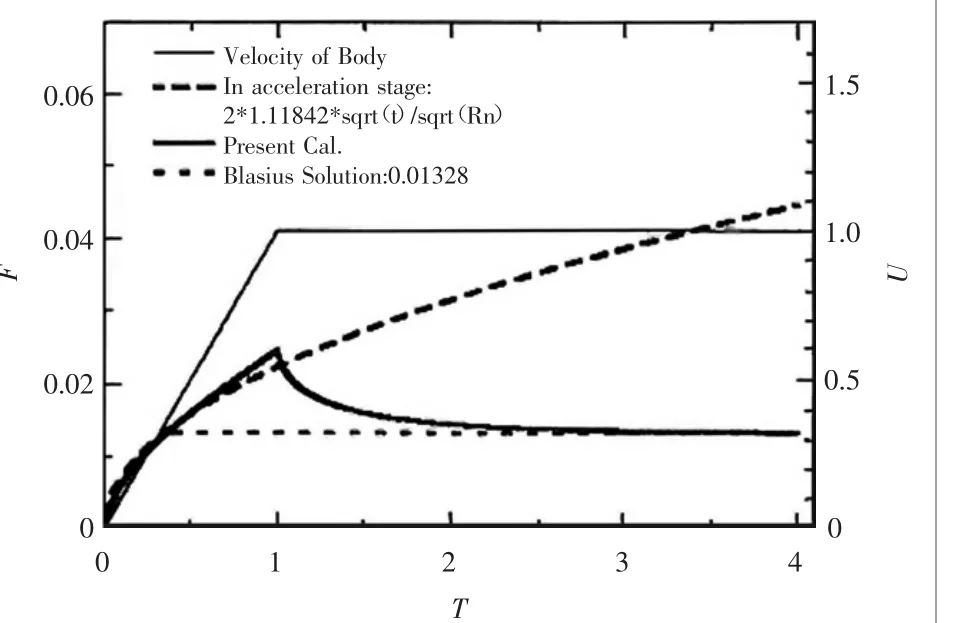
图21 日本大阪大学-平板在加速度阶段和等速阶段的计算结果
2004年美国西北大学的Malcolm A.MacIver等[33]对裸背鳗科“黑魔鬼”的长臀鳍波动推进模式进行模仿设计,研发出一种通过带状鳍波动推进的水下推进器,并在此基础上通过对模型的理想化建模与基尔霍夫方程产生轨迹的优化控制算法对“黑魔鬼”的快速倒退运动与背部翻转运动进行了计算研究(如图22),验证了黑魔鬼鱼在低速情况下的高机动性能。
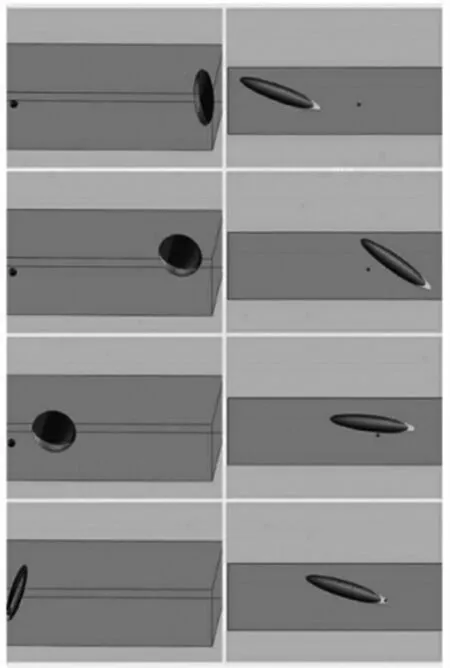
图22 美国西北大学-快速倒退运动与背部翻转运动研究
2008年中国科学技术大学章永华[34]通过对“蓝点魟”进行仿生建模,建立了简化的二维及三维胸鳍波动运动模型,结合ANSYS Fluent与CFD技术,以N-S为主控方程,通过动网格与非结构网格技术,SIMPLE算法控制方程的离散,对其进行了计算机仿真计算,其分析涵盖运动学参数、波动模式、波动鳍鳍面形状和鳍条倾角等多种变量对游动性能的影响,展现鱼鳍波动游动时鱼鳍周围反卡门涡街从生成到消散的全过程,从涡动力学角度解释推力产生的机理,从流体力学方面更进一步研究解释长鳍波动原理。
2009年周晗[35]使用CFD计算了理想化零厚度的三维仿生波动鳍面周围压力场、速度场的分布情况,丰富了使用CFD方法对于波动鳍面领域的研究。
2014年Hu Tianjiang等[36]借助CFD方法研究了仿生鱼类机器人的相位滞后效应并提出推力受运动学影响的结论。此外,当鳍条不能模拟预期的轨迹时,推力具有相位滞后的特征。相关的滞后相位Δp随时间变化,并随运动学参数的变化而变化。从控制方面并结合CFD方法这一新的角度对仿生鱼类机器人进行研究。
2017年章永华[37]建立了鳍条的2种运动模式下的运动学方程,通过对黏性不可压缩流体N-S方程的求解,比较在不同运动学参数下鳍条等幅和变幅2种运动模式对于无量纲阻力系数时间平均值与无量纲阻力系数的影响情况,揭示出无量纲阻力系数时间平均值随频率、摆幅和波长的变化规律以及无量纲阻力系数随时间的变化情况,并给出其运动模型沿鳍条方向切面的速度场和压力场分布变化情况与在两种波动运动情况下推进力变化(如图23)。
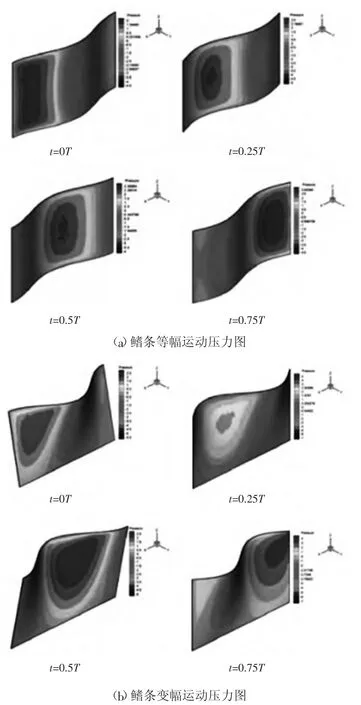
图23 章永华-鳍条等幅摆动压力图
2019年湖南大学陈健[38]对于多波动鳍仿生水下航行器进行分析研究,将复杂的三维波动鳍运动简化为二维波动,建立波动鳍二维运动模型,并通过UDF动网格技术对其运动过程进行仿真分析,分析波动鳍无量纲阻力系数的变化规律并展现波动鳍运动过程中压力场分布以及速度场分布特点。其将三维波动转化为二维波动的简化方法提供一种新的分析思路。同时随着技术的进步,流体力学分析也将更加依托高算力的计算机系统,朝着更加细致高效的计算机流体分析发展。
2 问题和展望
在原理方面,St数作为表征流动非定常性的相似准则,应用于水下长鳍波动式MPF推进模式机器人的实验研究时拥有无可比拟的先进性。但由于测量St值的实验要求的苛刻以及实验条件的限制,许多研究中人们只能粗略地测量,而难以单一地依据其实验数据对机器进行微调。也因为St值的测量粗略问题使得St数与雷诺数函数关系地构建误差较大,对于机器的动力学特性的反应可能会有失真情况的出现。因此St数应用的推广延伸以及实验经验的积累迫在眉睫,其与机器动力学特性逐步深入的结合必定成为日后相关研究的主旋律。
在结构方面,纵观水下长鳍波动式MPF推进模式机器人的结构研究,由于该推进模式的需求是形成稳定且连续的推进波,因此其结构必须包含多个独立带动鳍杆的驱动装置来控制材料鱼鳍生成特定形状、多种模式的波状形态。虽然“单一驱动——机械传动”的结构设计能通过摆杆或摇杆机构实现形成特定波动形状,但显然其无法满足像鱼类一样多种模式的波动形态,单一驱动的结构限制了形态变化上的多样性。近年来学者的研究正是综合了前人的研究,将驱动装置的数量控制在一定范围内,既不会因为数量太少无法形成预期的波动模式,又不会因为数量过多造成资源的浪费和故障所带来的高成本,最终达到最优的性价比。在此之后的研究中,如果没有一种更好的新结构能兼顾上述问题,就会继续探索驱动装置数量和推进性能两者之间的平衡关系。
在材料方面,一方面是鳍条的材料。由于水下MPF推进机器人鳍条材料需满足一定的强度,所以在以前的研究中鳍条材料多为记忆合金,但其记忆性能的退化性和能量转化以及工作响应频率的低效率暂时还没有得到较好的解决。也有其他材料如聚酰胺材料的选用的出现,它们的低密度确实是提高能量转化率的一大优点,但其吸水易膨胀的特性使得这种替代方案也难以真正意义上实现。合金作为鳍条材料也相对较多,其强度毋庸置疑,但其质量和成本以及形状的塑造难度较大。因此目前的研究趋势是通过ABS等材料进行制作鳍条材料,ABS材料的轻质高强度、化学性质相对稳定的特性且可进行3D打印来进行复杂形状的实现,更好地适应机体结构可以满足制作和应用水下MPF推进机器人鳍条的多元化需求,或将成为往后的发展趋势。另一方面是鳍面的材料,水下MPF推进机器人鳍面材料存在柔韧性和柔软度的要求,鳍面材料的选择多为类橡胶材料如乳胶、硅胶等。其中乳胶的性质相对硅胶并不稳定,且多为复合型材料,可能含有人体有害物质(一种致癌物),同时考虑其老化速度快的寿命问题会使得维护成本大大增加;人造肌肉在鳍面材料的选择上也存在,是一种新型智能高分子材料,和生物肌肉十分相似,但是其价格高昂,成本较高;在近几年的研究中发现橡胶材料用作水下MPF推进机器人鳍面材料更为合适,氟橡胶和硅胶的良好的化学性质和力学特性可以实现鳍面的运动进而满足水下MPF推进机器人的正常运动。在往后的研究中,通过材料配比进行特殊混合橡胶材质的自主研发或许将成为一大研究重点。
在流体分析方面,目前国内外对长鳍波动的研究仍然处于初级阶段,尽管对于长鳍波动已经开展了相对应的计算机仿真分析、运动建模、实验分析,从压力场、速度场等方面研究了影响长鳍推进力的影响因素,但关于长鳍波动推进效率的定量分析仍然较少。由于长鳍在波动运动过程中与周围流体的作用机理非常复杂,使精确的推进效率计算十分困难,而目前对于推进效率的计算研究过程中均对于波动模型进行了一定的假设和理想化,其分析论证结果的准确性和适用性仍有非常大的局限性,对于工程应用方面仍需继续探索。如今国内对于BCF推进研究占主流方向,在原理方面BCF与MPF相似度较高,对于MPF推进的研究则迫切需要更多的投入。
3 结语
对于水下长鳍波动式MPF推进模式机器人的研究,在研究开始的前几年,就已经基于各种可能的运动模式在原理和结构两方面进行了假设构想及实现可能性的探寻,在材料方面对于力学特性和运动的影响在一开始并未进行细致的研究。随着材料学科和计算机学科以及一些其他综合学科的不断发展,对于该类机器人未来的发展与完善可以通过更加先进的材料来制作其仿生结构,并使用更加高效的计算机辅助系统来协助进行流体力学模型的建立和计算,而在基础结构和基础数学原理的探索上,也有望产生新的突破,从而得到更加精细、精准的结论。
猜你喜欢
哲学评论(2021年2期)2021-08-22
中华诗词(2019年7期)2019-11-25
今日农业(2019年12期)2019-08-13
文学少年(原创儿童文学)(2019年1期)2019-05-23
中国化肥信息(2019年3期)2019-04-25
环境保护与循环经济(2017年2期)2017-09-26
影视与戏剧评论(2016年0期)2016-11-23
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07