多功能道路树木养护车的设计
2023-10-14 07:51曹旭峰孟利民周琪李强
机械工程师 2023年10期
曹旭峰,孟利民,周琪,李强
(安徽理工大学 机械工程学院,安徽 淮南 232000)
0 引言
随着我国经济快速发展以及现代社会的不断进步,城市道路绿化工作实现了突破性发展[1]。道路绿化是城市绿化的重要组成部分,城市道路树木可以净化空气、消除噪声、调节气候、美化环境[2]。对道路两侧树木养护的需求也越来越迫切,目前道路两侧树木的修剪、浇水、涂白等养护工作主要依靠人力完成。所用到的养护工具存在着功能单一、效率低、机械化程度低的缺点。本文的多功能道路树木养护车包括修剪装置、木材粉碎装置、浇水及刷白装置,可对树木进行修剪、残枝粉碎回收以及浇水和涂白。以车为载体,通过对其各个装置的结构设计,可以完成多种树木养护工作,实现一车多用,使道路树木养护工作实现了机械化作业,对提升我国道路树木养护作业机械装备水平具有重要的现实意义和实际价值。
1 多功能道路树木养护车简介
多功能道路养护车以车为载体,由修剪装置、木材粉碎装置、浇水及树木刷白装置组成。整车含有多种树木养护工具,修剪装置中的液压机械臂可对树木进行修剪,木材粉碎装置可对修剪后残枝粉碎、收集,浇水及刷白装置可对树木进行浇水、刷白的养护工作。其整体结构如图1所示。
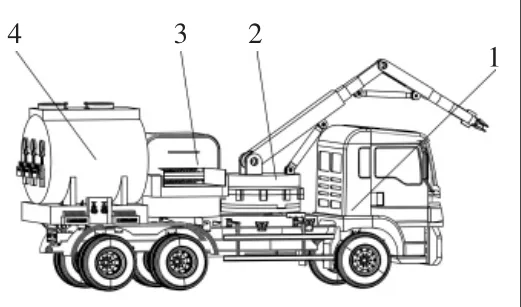
图1 整车结构图
2 多功能道路树木养护车各装置结构设计
2.1 修剪装置的结构设计
利用SolidWorks对多自由度的修剪液压机械臂进行建模,修剪液压机械臂的三维模型如图2所示。
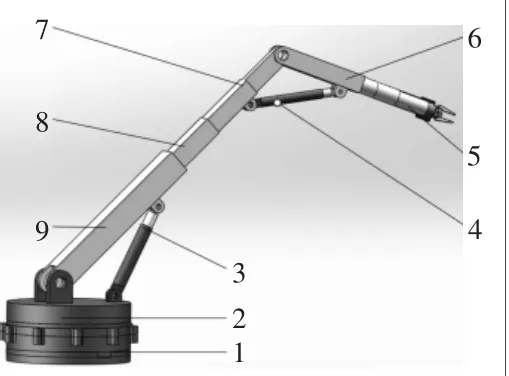
图2 修剪机械臂三维图
转盘底座固定在车体上,旋转盘由电动机驱动可进行360°旋转,修剪液压机械臂由两节折叠臂以及两节伸缩臂构成[3]。在机械臂内部和外部的举升液压缸的作用下可实现机械臂的长度和角度的调节。
在末节折叠臂Ⅱ中,其后半部设计为可旋转结构,且安装有修剪机构与夹抱机构,安装位置示意图如图3所示。修剪机构采用电动机为驱动带动链锯进行修剪工作,且链锯可以通过液压驱动来进行横向移动,以便于调整修剪位置。夹抱机构的机械结构如图4所示,可通过液压驱动来夹紧和松脱枝干且机构整体在末节臂中可伸缩。在修剪的作业中,当所修剪的树木下方没有行人及物体时,夹抱机构处于收缩在末节机械臂的状态,使用链锯直接进行修剪,在修剪作业完成后统一对地面的残枝进行处理回收。当所修剪树木下方人流量比较大或者有建筑物、公共设施时,可通过液压驱动使夹抱机构伸出,调整好机械臂角度,先夹紧枝干,再通过链锯的横向移动来切割所夹紧的枝干,最后由机械臂运送回地面指定收集位置。
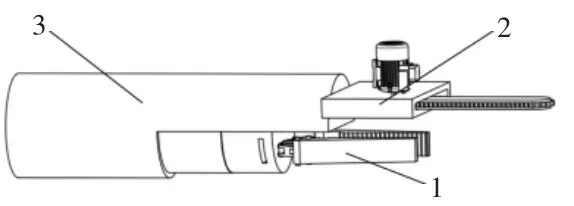
图3 末节机械臂结构图

图4 夹抱机构结构图
2.2 木材粉碎装置的结构设计
木材粉碎装置的结构如图5所示,装置主要由进料口、送料滚筒、粉碎刀片组、动力仓、储料仓等部件构成。进料口两侧设有挡板,防止木材碎片飞溅,当木材送入进料口后,随着送料滚筒的滚动,木材被卷入到粉碎机内部,电动机带动着粉碎刀片组将木材粉碎,碎料在重力的作用下落入到储料仓内。在粉碎作业后或储料仓满后,可从外部将储料仓抽出,对仓内碎料进行回收处理。

图5 木材粉碎装置结构图
2.3 浇水及刷白装置结构设计
给树木浇水和刷白是树木养护中重要的环节。目前,国内外大多采用人工拿毛刷来进行树木刷白工作,这种方式效率低、劳动强度大,还会造成涂料飞溅的现象[4]。浇水及刷白装置的基本原理是将此装置发动机连接在车体变速箱上,依靠车体动力输出来驱动装置的喷水泵[5]。其整体结构如图6所示,主要包含罐体、进出水口、刷树工具。罐体中分为主仓和副仓,主仓用于储水,副仓用于放置刷白液。罐体通过外接水枪和刷树工具来进行树木浇水及刷白的养护工作。

图6 浇水及刷白装置结构图
刷树工具的结构如图7所示,主要包括主手柄构架、副手柄构架、喷头、毛刷。喷头端部连接在主、副手柄构架上且相对于构架能够旋转,在夹紧树木进行刷树工作时使毛刷始终与树的轮廓水平贴合。这样就可以实现人保持原位置不动的情况下,只需调整手柄角度就可以使毛刷自上而下地刷树,提升了便捷性,提高了工作效率。
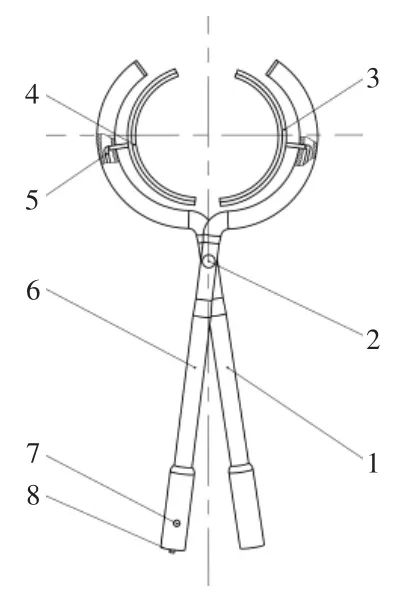
图7 刷树工具结构图
喷头采用多节弧状零件组合的结构设计,其结构如图8所示,相邻两节能够以连接处的中心为轴旋转一定角度,每个连接处内部设有环形弹簧卡扣。喷头可以在一定的范围内向外旋转,以调节其外轮廓的形状,且可以自动回弹到初始状态。刷树工具能够以较高的贴合程度在一定范围内适应不同的树干大小,罐体后部挂有3个调节范围不同的刷树工具,可根据所刷树干的轮廓弧度选择相应的刷树工具。
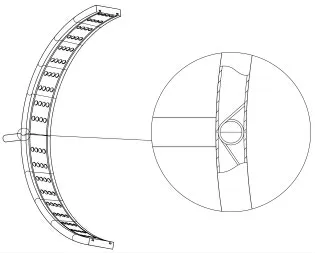
图8 喷头结构图
在进行刷树工作时,用导管将罐体的副仓与刷树工具连接起来,打开副仓阀体开关,工作人员双手握住两构架的手柄处,先向外扩张一定角度,使构架上半部圆弧部分打开并与地面保持水平,向树干靠拢后缩小手柄夹角,使毛刷与树干轮廓相贴合,夹紧后按压控制开关,使喷头开始喷射涂料,然后将手柄向下倾斜一定角度,使毛刷自上而下地涂刷树干。刷树过程中,在夹紧力的作用下,喷头在构架中转动且始终保持水平,刷到根部后张开手柄,脱离树干,调整角度更换工作面后再次重复上次操作,2~4次即可完成粉刷。
刷树工具在工作时,当树木弧度曲率大于喷头初始状态曲率时,喷头的最外节与树木相接触后,随着夹紧力的逐渐变大使得喷头的各节弧状零件由外到内依次向外旋转,环形弹簧卡扣受到力的作用产生形变,喷头的各节张角逐渐变大直至较高程度地贴合树木轮廓。喷头较高程度地贴合树木轮廓后,夹紧力与环形弹簧卡扣形变产生的弹力相平衡,按压控制开关开始自上而下粉刷树干。粉刷到根部后张开手柄,喷头的各节张角弧度在环形弹簧卡扣的弹力作用下回到初始状态。
3 修剪液压机械臂ADAMS运动学仿真
为验证所设计修剪液压臂是否满足实际修剪需要,要对其进行运动学仿真。将修剪机械臂的三维模型用SolidWorks简化后导入到ADAMS中,导入后模型如图9所示。用固定副将转盘底部与大地连接。各关节之间和液压缸各铰接点设置为转动副,液压缸和伸缩臂设置为移动副。通过对液压缸及伸缩臂设定STEP驱动函数来模拟液压机械臂的修剪过程。

图9 机械臂ADAMS模型图
运动仿真后,通过后处理模块得到运动学仿真结果,得到修剪链锯Y轴位移变化曲线(如图10)、两节伸缩臂速度幅值变化曲线(如图11),以及折叠臂间角度变化曲线(如图12)。通过对运动仿真结果分析,在模拟修剪过程中修剪刀具所达到的高度大于7 m,满足修剪道路树木的高度要求。折叠臂角度变化平缓,伸缩臂的速度幅值整体数值较小,说明修剪系统的各关节运动过程比较平稳。
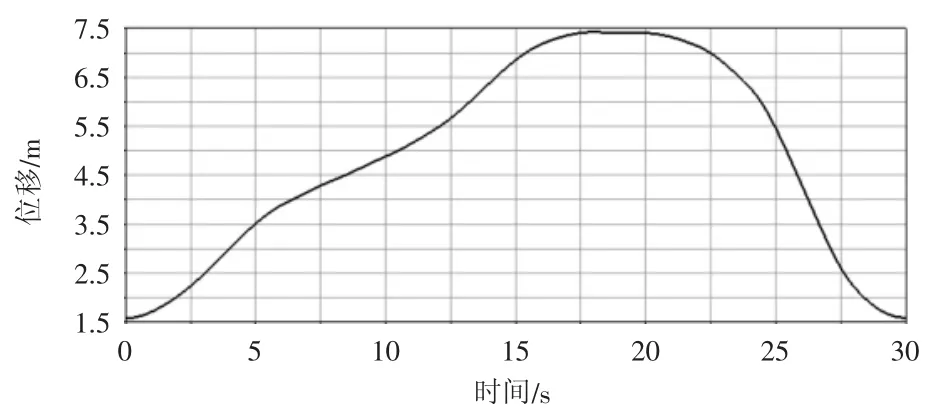
图10 修剪链锯Y轴位移变化曲线

图11 伸缩臂速度幅值变化曲线

图12 折叠臂角度变化曲线
4 结语
多功能道路树木养护车以车为载体,装备有树木修剪装置、木材粉碎装置、浇水及树木刷白装置,可完成树木修剪、残枝粉碎回收、树木浇水及刷白多种树木养护作业。该设备机械化程度高,提高了整机综合利用率,降低了劳动强度。通过对修剪液压机械臂的ADAMS运动学仿真结果分析,修剪高度达到预期要求,修剪液压机械臂运行稳定,整机满足设计需要。
猜你喜欢
浙江共产党员(2022年10期)2022-11-23
军事文摘(2021年16期)2021-11-05
装备制造技术(2020年11期)2021-01-26
少儿科学周刊·少年版(2021年20期)2021-01-17
建材发展导向(2020年16期)2020-09-25
中学生数理化·高一版(2019年3期)2019-04-15
电子制作(2018年11期)2018-08-04
浙江共产党员(2017年11期)2017-11-15
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10