基于主成分分析和学习向量量化神经网络的制动工况路面识别与验证
2023-10-12 04:28:34郑国峰陈文傅涛
汽车工程学报 2023年5期
郑国峰, 陈文,, 傅涛
(1. 重庆交通大学 机电与车辆工程学院,重庆 400074;2. 凯晟汽车技术(上海)有限公司,上海 201802)
路面类型特征识别对车辆制动工况的操纵稳定性和安全性比较重要,并对制动工况的制动距离和驾驶性能有较大的影响,进而影响了整车的主动安全性。路面类型是车辆控制器重要输入信息之一,如果能获得路面类型信息,那么主动安全系统包括牵引力控制系统(Traction Control System, TCS)、防抱死制动系统(Anti-lock Braking System,ABS)、自适应巡航控制系统(Adaptive Cruise Control, ACC)等的性能可以得到有效提升。例如,ABS可以根据不同路面类型信息调整制动,需要控制参数以实现最优控制效果。因此,准确识别路面类型对车辆主动安全控制有着重要意义。
现有路面识别方式主要分为直接和间接两种,具体而言:直接识别[1-3]的方法是通过安装特殊传感器和设备感知路面状态进行识别;间接方法是通过模型[4-5]和数据驱动方式[6-15]间接识别路面。针对直接识别方法,TANG 等[1]对路面图像特征提取,利用神经网络识别。CHENG Lushan等[2]利用多种路面图像数据经过卷积神经网络模型进行识别。也有采用雷达波、毫米波等对路面反射电磁波,通过传感器接收并分析识别路面[3]。这些方法对路面识别准确率高,能适应任何工况下的路面识别,工况适应性良好,但增加了其他硬件,需要添加额外传感器等设施。针对间接识别方法,ZHANG Xudong 等[4]基于魔术公式轮胎模型利用无迹卡尔曼滤波估计器估计车辆状态参数,通过广义回归神经网络(GRNN)和贝叶斯定理估算附着系数达到识别路面类型目的。FAURIAT 等[5]通过测量车辆上动态响应并利用卡尔曼滤波理论对路面粗糙度进行估计。该算法对路况和驾驶员行为的激励响应较好,但在车辆纵向动力响应基本没有区别时很难区分路面。XIAO Feng 等[6]对轮胎模型纵向、横向摩擦力估计提出改进,结合几个典型轮胎路面特征参数获取参数约束,减少估计误差。基于模型的路面类型识别利用现有传感器并结合一些非线性状态观测器可以识别道路,但观测误差一直是难点。数据驱动识别道路不考虑路面到车辆系统的响应过程,利用算法学习分析数据特征。SONG Tao 等[7]提出基于BP 神经网络将多种车辆状态和路面摩擦因数建立关系。王国微等[8]提出了一种基于径向基函数(Radial Basis Function, RBF)神经网络路面识别。作为路面识别的数据,RIBEIRO等[9]利用侧向力激励,王铁等[10]利用ABS标准信号,HALIL 等[11]利用ABS 制动压力脉冲,宋健等[12]利用多传感器数据提取路面特征信息进行路面识别。梁冠群等[13-14]基于LSTM网络,提取悬架加速度信息对路面辨识分类。上述研究中,将部分表征路面特征信息的传感器数据提取,作为路面识别的输入,但没有充分利用反映路面特征的传感器信息。
为了充分利用表征路面特征的传感器信息,本文提出基于主成分分析-学习向量量化(PCA-LVQ)神经网络智能算法的制动工况路面识别方法。该方法首先采用主成分分析,在制动时对传感器等采集的多维度驾驶数据进行降维处理,提取能表征路面特征的主要成分,建立学习向量量化神经网络对降维处理后的驾驶数据进行训练,将训练好的神经网络用于路面特征分类,最后采用制动工况下实车试验数据和硬件在环仿真数据进行验证,并对不同车速制动工况下算法的识别精度进行研究。
1 PCA-LVQ的制动工况路面识别算法架构
制动工况路面识别是一个分类问题,输入结构化数据包括车速、轮速、纵向加速度、轮缸压力和制动滑移率等与路面相关的信息,这些信息包含不同的识别特征。特征越多的信息能捕捉不同类别的差异,从而提高准确度,但也会造成运算的负担。采用主成分分析(PCA)可以对数据信息降维处理,减少运算负担。利用蕴含许多特征信息的结构化数据输入神经网络,利于提取并分类不同类型的路面,如图1所示。

图1 PCA-LVQ算法识别架构
1.1 PCA数据处理
由于数据采集频率不同,需对数据进行预处理,按照相同时间长度分组,以保证数据长度的一致性和准确性。预处理方式如图2所示。
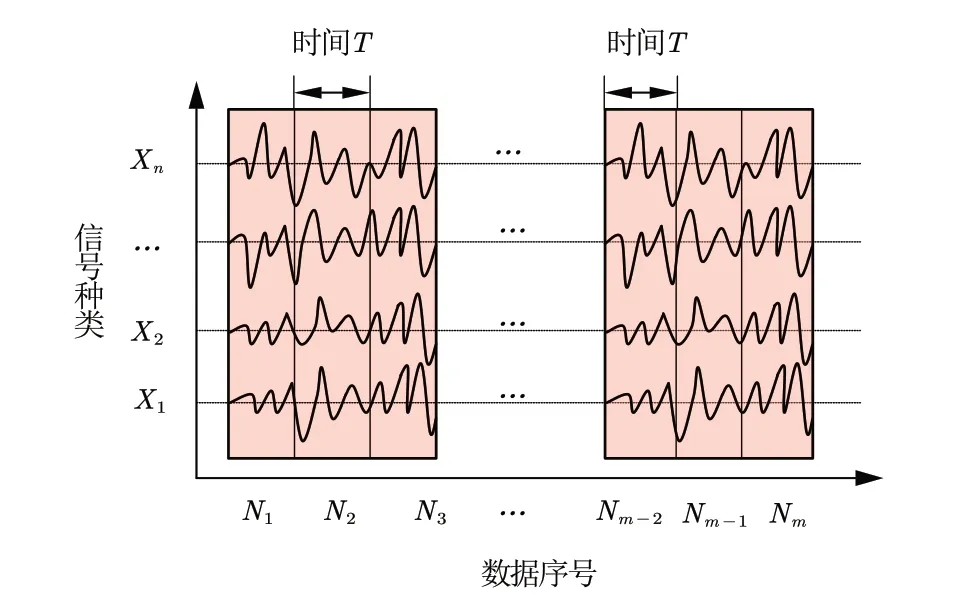
图2 数据预处理示意图
其中,Nj(j= 1,2,...,m)为数据数量;Xi(i= 1,2,...,x) 为 信 号 种 类 ;Tt(t=1,2,...,T)为时间组。
主成分分析是一种高效处理多维数据的方法,通过线性投影将多维数据映射到低维空间并保留关键特征,如最大值、最小值、平均值和方差等;特征越多网络越能捕捉不同类别的差异,采用PCA可以消除冗余特征,最终保留的特征及其数量将基本决定模型的准确性。处理方式如下。
输入:样本集A={x1,x2....,xn};低维空间维数d。
1)对所有样本进行标准化,得到均值为0,标准差为1 的服从正态分布的数据。样本标准化计算步骤为:
对矩阵标准化得到标准化矩阵B=(bnp)z×t,矩阵中每个元素为:
式中:anp为原样本元素;minap为p列最小值,maxap为p列最大值。
2)计算样本协方差矩阵。对标准化矩阵Bx×t求协方差矩阵经标准化的样本数据的协方差矩阵就是原始样本数据的相关系数矩阵,相关系数矩阵中每个元素rnp的值为:
式中:bnj为标准化矩阵B中元素;、为均值。
3)计算协方差矩阵R的特征值和特征向量,并将特征值λ按照从大到小顺序排序。
4)计算每个主成分的贡献率(方差解释率)和累积贡献率(方差解释率)。
式中:i为主成分个数;m为第m个主成分。对每个主成分的贡献率(方差解释率)进行累加,取累积贡献率(方差解释率)达到98%以上的主成分。
5)选取贡献率高的主成分,并保留前d个贡献率高的特征值对应的特征向量v1,v2,...,vd。
输出:投影矩阵V=(v1,v2,...,vd)。
1.2 LVQ神经网络
学习向量量化神经网络(LVQ)是一种用于训练竞争层的有监督学习方法的算法。在解决非线性问题分类识别和优化领域有优异效果。
LVQ 神经网络包含3 层:输入层、竞争层和线性输出层,每层只能依次连接,且连接方式不同,输入层和竞争层采用全连接方式,竞争层和线性输出层采用部分连接方式。竞争层的神经元多于线性输出层,每个竞争神经元只连接一个线性输出层神经元,权值为1。当未知模式输入神经网络后,将激活最近的竞争神经元并将其状态置为“1”,其他神经元则为“0”。最后,输出连接的线性输出层,并根据输入与输出对应情况调整竞争层神经元权值,LVQ神经网络结构如图3所示。
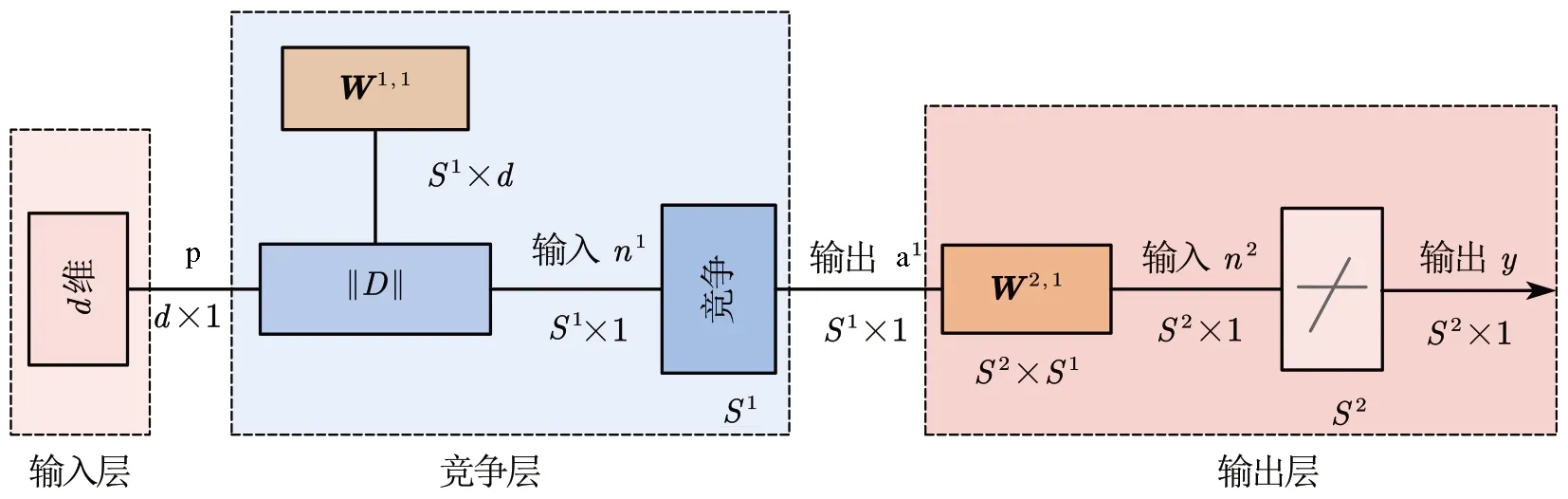
图3 学习向量量化网络
其中,p 为d维的输入模式;S1为竞争神经元个数;W1,1为输入层与竞争层的连接权重矩阵;n1为竞争层神经元输入个数;a1为竞争层输出的神经元;W2,1为竞争层与输出层的连接权重矩阵;n2为输出层神经元的个数;y为输出层输出结果。
基本LVQ算法步骤如下。
1)初始化输入层和输出层之间的权值wab及学习率η0(η0>0),给定训练的目标次数c′。
2)将输入向量v=(v1p,v2p,...,vdp)T传给输入层,计算输入层神经元与竞争层神经元的距离。
式中:wab为输入层的神经元b与竞争层的神经元a的权值。
3)筛选出距离最小的D,作为与输出层连接的分类标签Ki。
4)记输入向量对应的分类标签为Kf。如果Ki=Kf,调节权值为:
若Ki≠Kf,则权值调整方式为:
5)更新网络学习速率:
6)如果训练目标次数未达到目标次数,输入下一个样本作为新的输入,重复训练步骤,直到达到设定的目标值。
1.3 路面类型划分
路面类型的附着系数可能因路面状态、温度、湿度等多种因素而不同,实际识别的路面类型附着系数都在一定范围内。结合标准路面的μ-λ曲线,将两种附着系数值中间区域作为此路面类型范围,构造路面附着系数为0.1~1.0的μ-λ曲线构造辅助线,辅助线的公式为:
式中:μLi为第i条辅助线;μi为第i条标准路面的μ-λ曲线。划分区间见表1和图4。

表1 标准路面类型划分及编号
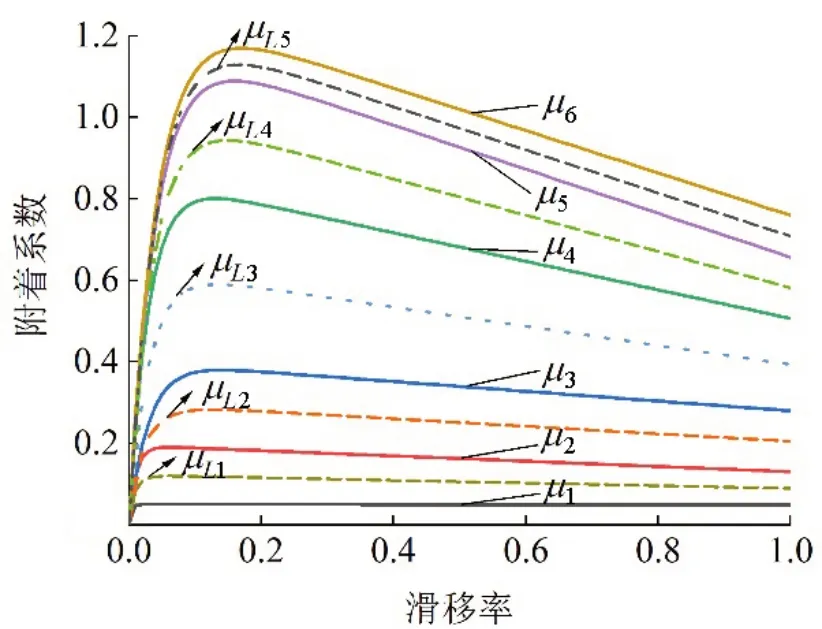
图4 各路面区域划分
路面附着系数大致划分为6 种类型路面,将常见的路面类型包含在其中,根据算法判断路面类型编号,即可判断路面类型,从而得知路面附着系数区间大致范围。例如,若算法识别出的路面类型编号为5,则路面类型是干水泥路面,附着系数区间为0.6~0.8。
2 制动工况路面识别算法
利用上述PCA-LVQ 算法对车辆制动数据特征提取,并构建制动工况路面识别算法。其主要流程如图5所示,分为神经网络训练阶段和识别阶段。
2.1 神经网络训练阶段
在神经网络训练阶段,第1 步随机选取同一时间段内2 s,按照0.01 s 的时间长度将每种信号采样点分为一组;
第2 步将每组信号组成的数据矩阵输入到PCA处理流程中,得到降维的特征矩阵。
第3 步训练LVQ 神经网络,特征矩阵输入向量的每个维度都与每个神经元之间都存在连接,对数据全局处理,然后根据神经元的权重分配差异,得到不同类型的值。设置初始化参数后,将车辆制动响应数据与对应的路面类型标签输入网络开始训练,通过得到不同路面类型的分类结果,以及对训练参数如迭代次数、学习率等进行调节,实现较高的辨识准确度。神经网络识别需要大量数据进行训练,试验数据中可能包含外界因素干扰,因此在神经网络训练阶段加以仿真测试的信号作为训练数据的补充。仿真获取训练数据中,利用硬件在环模拟不同路面的紧急制动情况,通过CarSim 的车辆模型模拟车辆制动的响应状态,输出车辆各种信号。试验获取训练数据中,只需在不同类型路面上将车辆CAN总线上信号采集即可。
2.2 识别阶段
在算法识别阶段,训练好的网络可以直接用于识别路面类型。将车辆制动时,采集CAN 总线的相应信号,截取信号片段后进行PCA处理,输入训练好的网络中,便可以快速得到路面类型分类的结果。
3 神经网络训练
神经网络训练需要大量不同路面数据,由于实际道路试验数据采集获得大量重复工况的训练数据耗时较长,所以利用硬件在环(Hardware-in-the-Loop,HIL)台架模拟实车采集数据作为补充。取实车不同路面试验制动数据作为一部分数据来源,其余数据采用HIL 台架模拟实车制动重复对不同路面进行数据采集。实车试验采集在试验场进行,在不同类型路面加速至一定速度后进行制动,采集车辆数据。HIL 台架数据采集是在设定的不同类型道路上进行制动,通过CarSim 车辆模型和制动执行器模拟车辆在制动的响应,由传感器获取大量训练数据对神经网络进行训练。训练好的神经网络可直接用于不同路面类型辨识。
3.1 HIL台架模拟实车制动数据采集
HIL 台架是将真实的控制器与虚拟的车辆模型和仿真环境相结合,模拟实际的工作条件,能真实反映系统性能,是高效且低成本的车辆开发工具,如图6所示。
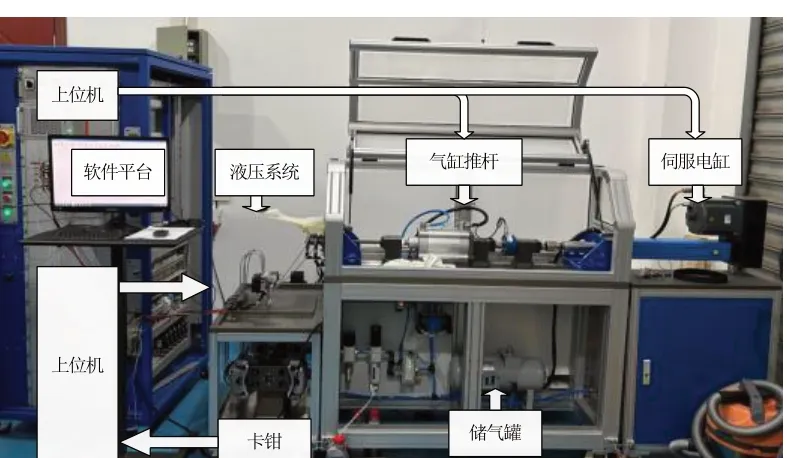
图6 制动系统自动化功能测试台
左侧上位机柜中主要包含CAN 板卡、轮速板卡、继电器板卡以及各类电气开关等设备,右侧液压系统提供制动系统的实际工作环境,制动伺服电缸和气缸推杆组成的制动机器人主要模拟驾驶员踩制动的过程。实际应用HIL 台架需要在上位机中配置车辆和道路类型的参数,右侧制动系统模拟一辆实车制动过程:伺服电机和气缸推杆模拟制动踏板进行制动,通过液压负载柜上搭载的液压制动系统,给卡钳施加夹紧力实现车辆制动。
利用HIL 台架模拟不同路面类型下车辆制动工况,并实时采集各种信号,同样以60 km/h 速度制动,为了使数据与真实情况更相似,设置主缸压力上限在一定范围内随机,模拟驾驶员紧急制动的踏板速率所造成的波动。在HIL 台架上模拟车辆以60 km/h 的初始速度于不同路面类型上制动,生成6 种不同制动响应数据,每次采集数据后,按照0.01 s 的时间长度将每种信号采样点分为一组,输入训练集的有1 200 组数据,由6 种不同制动响应数据组成,每种路面200 个样本,每组样本时间长度为0.01 s,即长度为2 s 的数据段作为选取片段,图7为冰面制动单个轮缸压力数据选取示意图。

图7 冰面制动单个轮缸压力
3.2 实车数据采集
根据GB 12676—2014 标准,车辆制动初始速度为60 km/h,试验中测量不同路面类型制动工况下车辆轮速、行驶速度、制动减速度、制动主缸压力、制动轮缸压力等物理量,如图8所示。
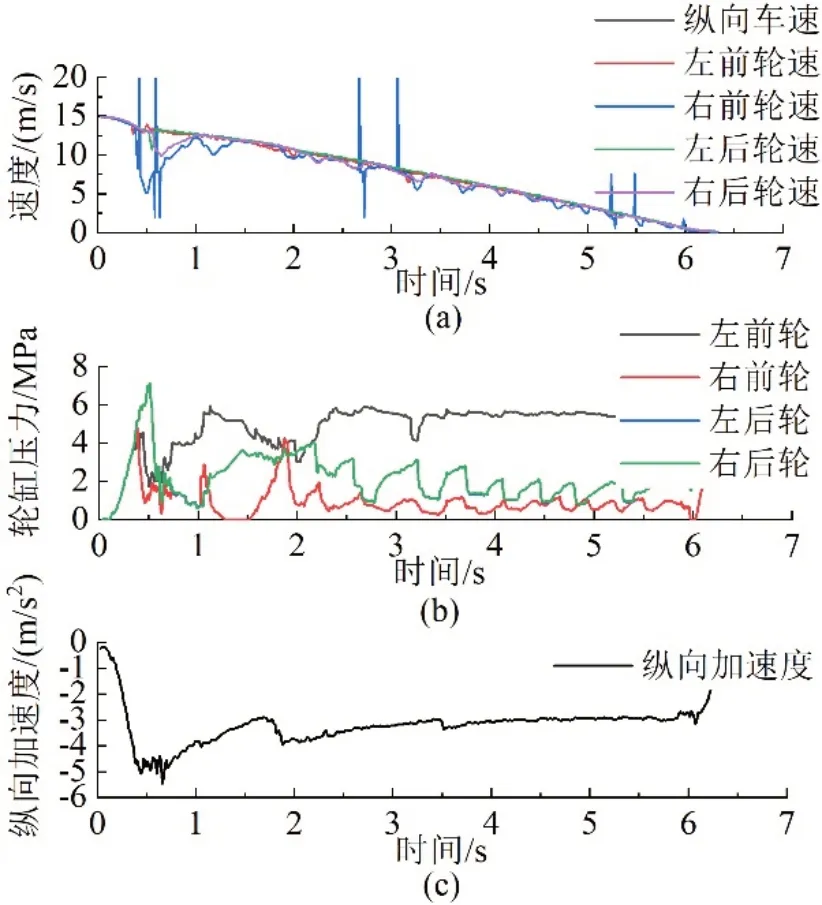
图8 车辆制动时采集数据
将实车制动数据采集,可以发现车辆在不同路面类型制动时,相应的物理曲线反映有鲜明特征。考虑到不同路面类型的轮缸压力、轮速、主缸压力等幅值变化范围不相同,且每种信号包含特征信息较多,为使神经网络训练更有效率,对这些数据进行PCA处理后,再输入到神经网络中进行训练。
3.3 PCA处理
以试验数据和仿真模拟数据作为训练数据输入,输入信息维度包括车辆行驶速度、制动减速度、制动主缸压力、制动轮缸压力等,6 种不同路面制动响应数据组成1 200 组数据,每种路面200个样本,经过PCA主成分分析后可得到包含特征信息更多,维数更少的数据。
首先将数据标准化处理,再计算主成分及相应贡献率(方差解释率),主成分对应贡献率越高,主成分越重要,权重占比也越高。贡献率达到90%以上,成分代表特征信息更多,见表2。
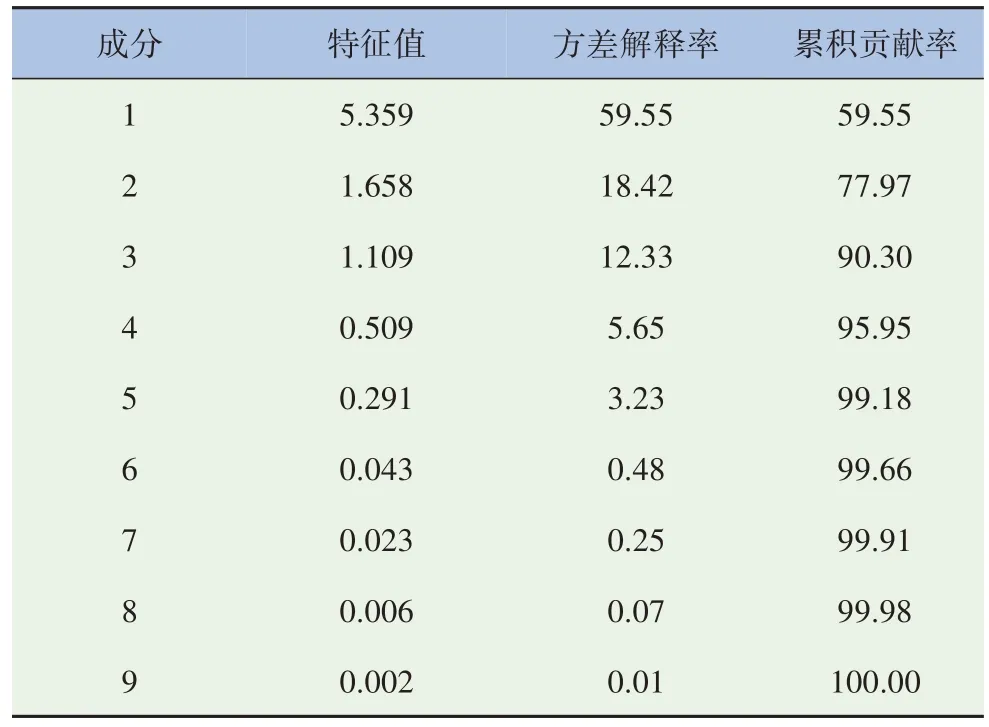
表2 方差解释表
选择累积贡献率达到90%以上的,能代表典型特征信息的成分,前4 个成分贡献率达到95%以上,选择作为主成分。因子载荷系数表见表3,进行成分的重要性核验,对每一个成分进行因子载荷系数计算,总结出成分中的重要因子。
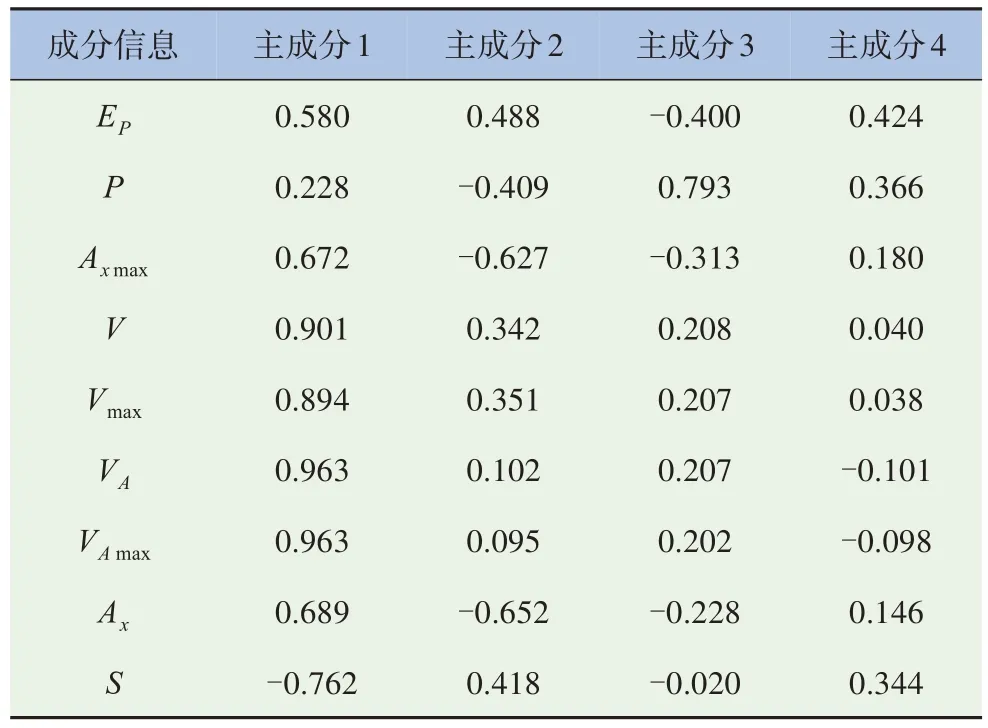
表3 因子载荷系数表
根据表3 可以判断第一主成分为轮速和最大轮速;第二主成分为车辆纵向加速度;第三主成分为实际轮缸压力;第四主成分为主缸压力与轮缸压力的差值。
因此,PCA 分析得到数据降维后,包含制动路况特征的主成分有:轮缸压力P、轮速VA和轮最大速度VAmax、主缸压力与轮缸压力的差值EP和轮缸压力P。
3.4 网络训练
以试验数据和仿真模拟数据经过PCA处理后的降维数据作为样本,训练集共1 200 个样本,神经网络参数进行初始化设置最大训练次数为100 次,训练结束的目标为0.001,学习率为0.2。本节展示了网络训练过程中训练次数的调整,算法识别的准确率和损失函数值如图9所示。

图9 训练次数与识别准确率
在网络训练中,识别准确率会受到训练次数的影响,随着训练次数的增加,神经网络可以更准确地拟合数据,找到更优权重。算法中,随训练次数增加,识别准确率呈现上升趋势,训练次数达到1 000 次左右时,算法准确率稳定保持在95%左右,损失函数的损失值趋于0,训练未发生欠拟合和过拟合的情况。为了保证算法的准确性和处理效率,将神经网络参数的最大训练次数设置为1 000次。
4 算法识别验证与分析
4.1 算法对比
为研究所提出的路面识别算法的优异性,与BP 神经网络、LVQ 神经网络两种路面类型识别算法开展了对比研究。不同算法识别结果如图10所示。
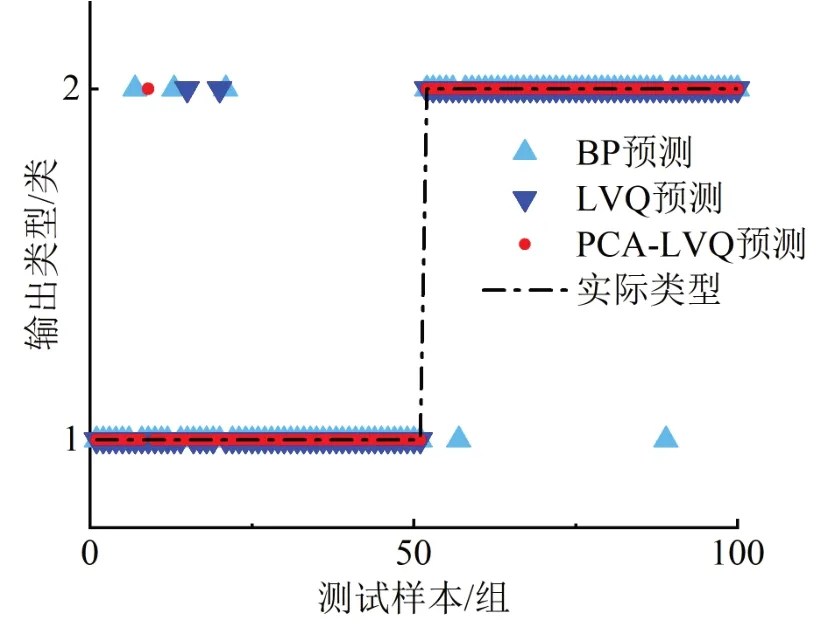
图10 不同算法识别结果
由图10 可知,与BP 神经网络和LVQ 神经网络的路面类型识别算法相比较,PCA-LVQ 神经网络的识别错误率更低。为了评价路面识别算法的精准度,引入识别误差e对路面识别精度进行评价,误差e定义为:
式中:e为总识别误差;Y为算法识别正确的数量;N为输入识别的总数量。3 种算法对路面识别的精度如图11所示。

图11 不同算法识别精度
由图11 可知,3 种算法中,PCA-LVQ 算法表现最佳,LVQ 神经网络算法比BP 神经网络算法识别精度更好,是由于采集试验数据中包含噪声误差且数据较多。BP 神经网络对于噪声比较敏感,而LVQ 神经网络对噪声具有较强的鲁棒性,但对大量数据集处理能力较差;PCA-LVQ 算法采用PCA 提取主成分,降低数据维度,对路面识别精度具有较大的提升,识别精度约为97%,较BP 神经网络识别精度提高7%。
4.2 算法验证
测试数据和训练数据来源相同。算法利用采集到的车辆制动各信号,处理降维后,测试神经网络对这些信号的识别能力。验证路面编号1~6,分别代表冰面、雪面、湿鹅卵石、结冰沥青、干水泥和干沥青路面。按照顺序依次将路面制动信息导入神经网络,测试识别效果,结果如图12所示。
由测试结果可知,大多数数据组预测类别与实际类别一致,误差类别也在附近波动,由于冰面、雪面等低附着系数路面的特征更明显,神经网络捕捉特征信息更容易进行辨识,所以识别精度相对于其他类型路面高。总体路面识别效果较好,平均识别精度为97%,该神经网络能准确识别不同路面类型。
4.3 鲁棒性分析
速度鲁棒性是制动工况路面识别算法实际应用的重要影响因素。在以往的研究中,算法通常以一个固定的车速作为约束制动条件,具有固定的特征捕获特性。而在实际驾驶工况下,驾驶员在进行紧急制动时的车速不尽相同,因此,验证路面识别算法对速度的鲁棒性不可忽视。验证算法在不同车速制动时的鲁棒性,设置不同的制动初速度,检验算法的识别准确率,如图13 所示。对该神经网络以不同的速度进行训练识别,选取3 种不同路面(冰面、结冰沥青路面和沥青路面)上的制动速度在20~70 km/h之间变化。
速度鲁棒测试结果表明,该算法在较宽速度范围内其准确率均高于90%,表现优秀。使用PCALVQ 算法训练的神经网络能适应不同车速下的路面类型识别。在测试过程中,车辆在路面附着系数较低的冰面和结冰沥青路面上以不同的初始速度进行制动时,由于路面附着系数较低时,制动时轮速、加速度等的变化幅度更大,相关特征更明显,算法对路面特征提取比较容易,所以识别准确率没有明显变化。而当车辆在路面附着系数较高的干沥青路面上制动时,车速较低时,车辆制动响应更加稳定,相关特征变得不太显著,算法的识别精度稍有下降,出现约5%的浮动。随着速度的增加,轮速和加速度等变化幅度增大,算法的识别精度变得更高且更加稳定。证明了算法在不同的环境下均具有较高的识别精度和鲁棒性。
5 结 论
本文提出了一种新的路面类型识别方法。采用PCA-LVQ 神经网络实现车辆制动时路面类型识别。训练中使用的数据来自试验场试验和HIL 台架。试验论证了PCA-LVQ 神经网络利用制动时车辆加速度信号、轮速、轮缸压力等信号识别路面类型的可行性。在经过训练的神经网络上对测试集的验证表明,该神经网络可以识别制动数据,路面识别准确率高达97%。该算法可以识别所有典型路面。对不同车速下测得的制动路面进行了识别测试,证明该算法在变工况下具有良好的鲁棒性。
与以往的路面类型识别算法相比,该算法具有以下优点。
1)能充分利用表征路面特征的传感器信息,如车辆纵向加速度、轮速等。
2)无需建立复杂车辆模型,只需利用车辆自身的传感器输入信息,硬件成本低。
3)无需滤波,噪声容忍度高。
4)鲁棒性高。通过改变车速仍可以有效识别。
在实际工程中,辨识结果可为车辆制动控制参数调节提供必要的依据,有重要的工程意义。该识别模型提供了一种更加便捷的识别思路,有较好的应用延展价值。
猜你喜欢
煤气与热力(2022年4期)2022-05-23 12:44:44
舰船科学技术(2021年12期)2021-03-29 01:28:34
铁道通信信号(2020年1期)2020-09-21 08:55:04
疯狂英语·新悦读(2019年11期)2019-12-18 05:14:16
电子制作(2019年19期)2019-11-23 08:42:00
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
专用汽车(2015年4期)2015-03-01 04:10:02
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:31
海军航空大学学报(2015年4期)2015-02-27 13:45:47