雨雾天气下的自动紧急制动系统测试评价方法研究
2023-10-12 04:28:30张新锋李浩宋瑞杨凯凯
汽车工程学报 2023年5期
张新锋, 李浩, 宋瑞, 杨凯凯
(1. 长安大学 汽车学院,西安 710064;2. 长安大学 信息学院,西安 710064;3. 中国汽车技术研究中心有限公司,天津 300300)
自动紧急制动(Autonomous Emergency Braking,AEB) 系统属于高级驾驶辅助系统(Advanced Driving Assistant System,ADAS)范畴中的一种主动安全技术。当发生紧急情况时,通过预警机制和自动制动可以避免车辆发生碰撞或者降低碰撞概率,减小碰撞后的损失,提高行车安全性[1-2]。根据美国高速公路安全保险协会(Insurance Institution of Highway Safety,IIHS)的研究,AEB 系统可以减少27%的交通事故[3]。ROSÉN 等[4]研究显示AEB系统可将死亡人数减少40%,重伤人数减少27%。因此,AEB系统在提高车辆行驶安全性方面作用显著。如何测试AEB 系统的性能,需要构建科学完善的AEB系统测试评价体系。
AEB系统的测试评价过程主要包括构建测试场景、建立评价方法和进行综合测试评价。在测试场景构建方面,根据欧洲新车评价协会(European New Car Assessment Program,Euro-NCAP)和中国新车评价规程(China- New Car Assessment Program,C-NCAP),将AEB 系统测试场景按照事故碰撞对象划分为3 类,分别为车对车测试场景、车对两轮车测试场景和车对行人测试场景,并据此开展了大量的场景测试研究。季中豪等[5]针对实车开展AEB 系统测试,在测试场景中增加了碰撞点偏置、弯道测试、自行车与行人测试和夜间测试,以突出测试AEB 系统的感知与制动能力。GELDER 等[6]和LENARD 等[7]将深度调查事故数据和自然驾驶数据结合,采用聚类分析方法,将静态(道路、环境)与动态元素(交通参与者)融合,构建测试场景。李霖等[8]依据中国交通事故数据中骑行者的事故数据,采用聚类分析方法,根据危险工况搭建了车-骑行者的危险工况测试场景。胡林等[9]利用两轮车事故数据,采用聚类算法,分析不同参数特征下事故伤亡程度,得到速度等运动参数,构建了车-两轮车的AEB 系统测试场景,提出针对我国道路特征的面向两轮车的AEB 系统测试方法。在测试评价方法方面,现有研究主要以某一单指标对AEB 系统进行评价。EDWARDS 等[10]基于交通事故数据库,通过分析车与行人碰撞数据,得到3 种不同车速下行人直行与横穿的测试场景,采用以是否发生碰撞作为AEB 系统评价的唯一指标。吴斌等[11-12]基于自然驾驶数据集和车辆的运动参数,筛选危险场景,根据发生780 例事故的危险场景,设计了测试场景,以最大制动减速度和紧急制动反应时间作为评价指标,对AEB 系统进行评价。胡远志等[13]搭建了前车静止(Car to Car Stationary,CCRs)与前车制动(Car to Car Braking,CCRb)场景,采用基于安全距离的控制策略与基于碰撞时间的控制策略,以制动距离作为评价指标,评价了不同AEB 系统控制策略在不同场景下的表现。彭忆强等[14]依据我国事故类型、伤亡人数和财产损失等数据,提出我国城市道路的AEB 系统不同测试工况,并以速度减少量作为评价指标,通过实车测试验证评价方法。以上研究丰富和完善了AEB 系统测试评价理论和技术,但也存在着不足之处,主要表现为:测试场景均未反映雨雾等危险复杂天气情况;评价方法采用单一指标,导致评价结果与实际情况存在较大偏差。
综上所述,为了提高AEB 系统测试评价结果的客观性和准确性,完善AEB 系统的测试评价体系,本文考虑复杂气象条件,采用NAIS 的事故数据,参考C-NCAP 测试规程[15],构建多个测试场景;引入层次分析法(Analytic Hierarchy Process,AHP)搭建AEB 系统层次结构模型,以碰撞时间(Time to Collision,TTC)、速度减少量百分比、相对距离和最大减速度等4 个与车辆制动相关因素作为评价指标,提出了AEB 系统综合评价方法;在PreScan-Simulink 平台上搭建了仿真测试场景,应用所提方法进行了测试评价,并与传统的单一指标评价方法进行对比验证。
1 AEB系统测试场景构建
研究AEB 系统测试场景,需要基于交通事故的具体情况,构建AEB 系统测试方法[14]。根据NAIS的499例机动车碰撞事故数据,按天气类型和事故对象统计的结果见表1。
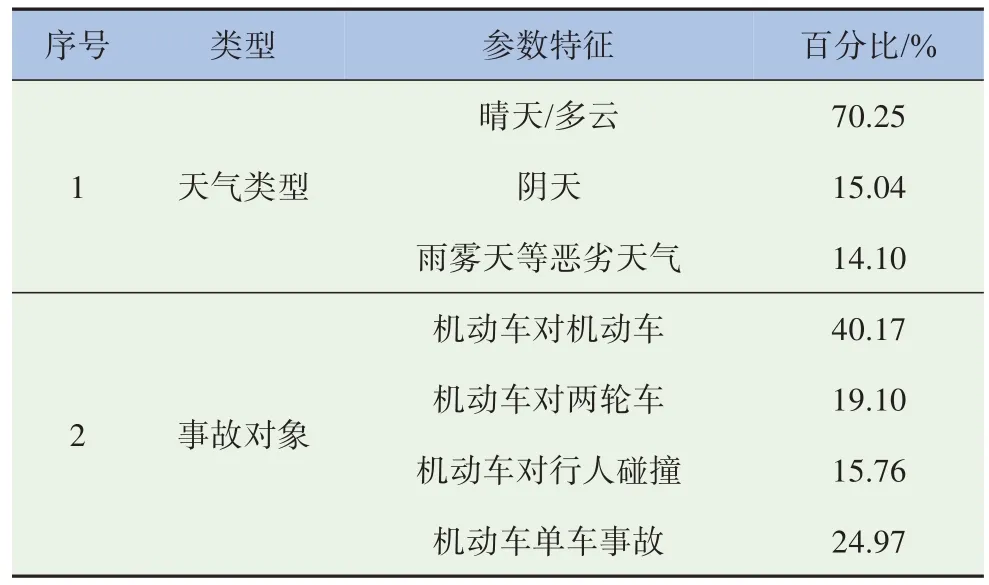
表1 NAIS事故统计数据
根据天气类型,可以分为晴天、阴天和恶劣天气3 类,由表1 可知,晴朗天气下事故占比为70.25%,雨雾天气下事故占比为14.10%,这说明雨雾等复杂气象条件是车辆测试场景不可回避的。根据车辆事故对象可分为与机动车、与两轮车、与行人和与单车4 类,分别占比为40.17%、19.10%、15.76%和24.97%。根据中国交通事故深入调查(China In-Depth Traffic Accident Study,CIDAS)报告[16],制动不及时导致交通事故的占比约为15%。根据公安部交通管理局公布的数据[17],约50%是由前车过慢行驶而引起追尾,此外,前车突然变道引发追尾事故,也占有一定比重。因此,在设计测试场景时,还需要考虑车辆偏置碰撞的情况[5]。由于机动车在良好天气下和对机动车碰撞事故占比最大,构建良好天气下对机动车测试的场景更符合实际情况。而机动车在雨雾天气和对两轮车以及对行人也占有一定比例,且被测对象的体积大小会影响传感器的识别效果,因此,考虑到雾天能见度比雨天更低,且行人体积相对于两轮车更小,为了更客观地反映AEB 系统在雨雾天气下的性能,需要设置雨天机动车对两轮车碰撞和雾天机动车对行人碰撞的测试场景。
综合考虑天气类型、事故对象和偏置碰撞因素,参考C-NCAP 的AEB 系统试验方法[15],针对机动车、自行车、摩托车和行人在良好天气、雨天和雾天3 种天气下,以及25%、50%和75%偏置碰撞情况下,构建了前车静止、前车制动、前车低匀速、骑行者横穿马路、骑行者沿路、行人横穿马路和行人沿路等7类,共计17个AEB系统测试场景。
2 AEB系统综合评价方法
2.1 AEB评价层次模型
AHP是一种常用的多准则决策方法,可以对定性问题进行定量分析,在众多领域评价方面有着广泛的应用,本文考虑应用该方法对AEB 系统在不同测试场景下进行评价。
AHP包括目标层、准则层和方案层,可分别用M、Z和F表示。根据构建的测试场景与AHP原理,将天气类型作为准则层Z1,事故对象作为准则层Z2,各种偏置工况作为方案层F,对应上述7 类共17 个测试场景,建立AEB 系统评价层次模型,如图1所示。
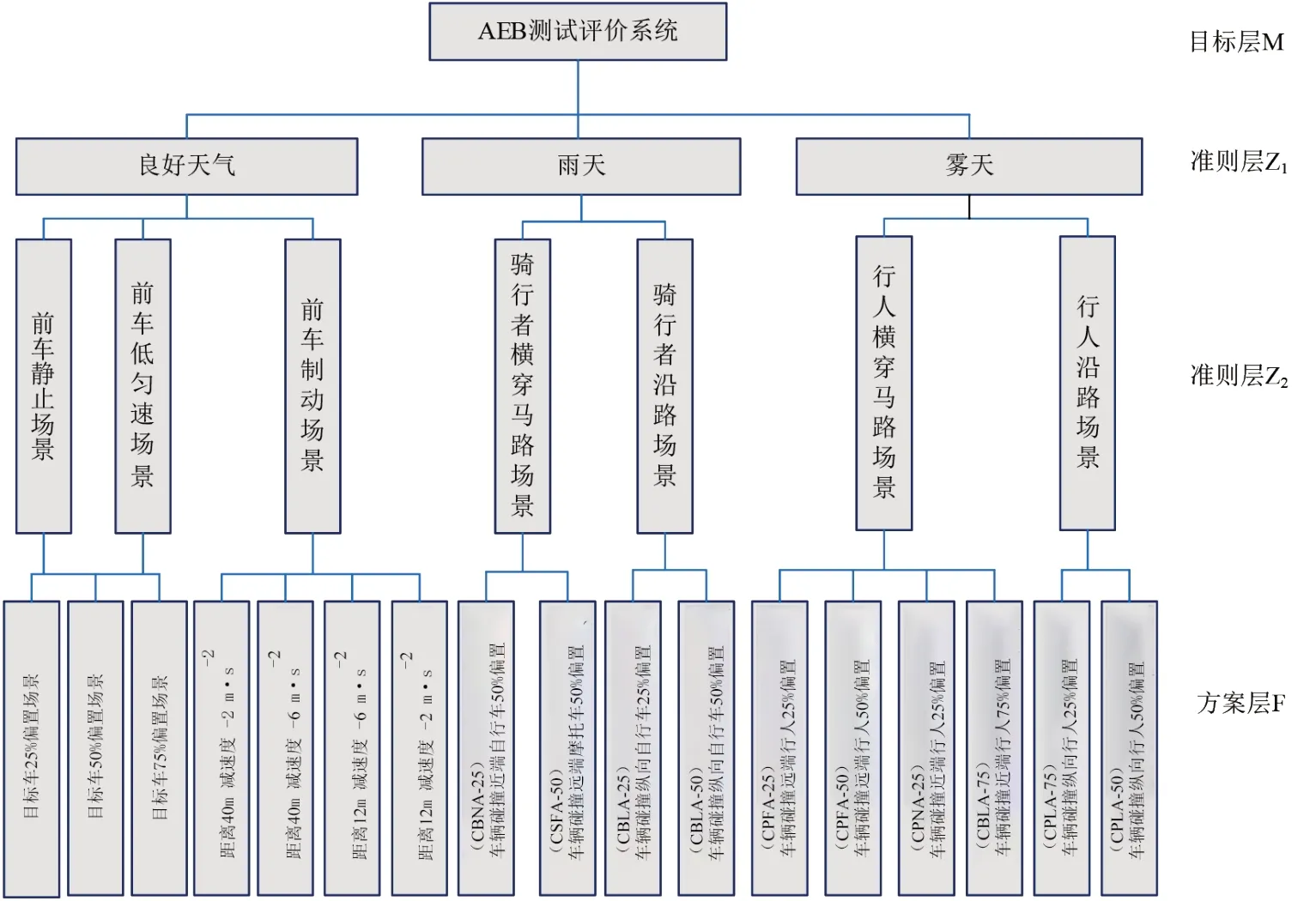
图1 AEB评价层次模型
2.2 判断矩阵确定
在AEB 系统评价模型中,层间元素的相对重要性,可用判断矩阵来表示。先对同层元素进行两两比较,再利用九分位比率将重要程度数值量化,则目标层M相对准则层Z1的判断矩阵A可表示为:
根据3 类天气条件,可建立3 个准则层Z1与准则层Z2之间的判断矩阵。以图1 的雨天场景为例,该准则层Z2(雨天)对方案层F(骑行者横穿与骑行者沿路场景)的判断矩阵B可表示为:
根据事故对象,可建立7 个准则层Z2与方案层F 的判断矩阵。以图1 的行人横穿马路场景为例,该准则层Z2对方案层F的判断矩阵C可表示为:
按照AHP 方法原理,为了比较元素的重要性,判断矩阵中元素的取值一般有1、3、5、7、9、1/3、1/5、1/7 和1/9 一共9 个标度,这9 个标度的具体含义见表2[18],且对角线元素互为倒数。
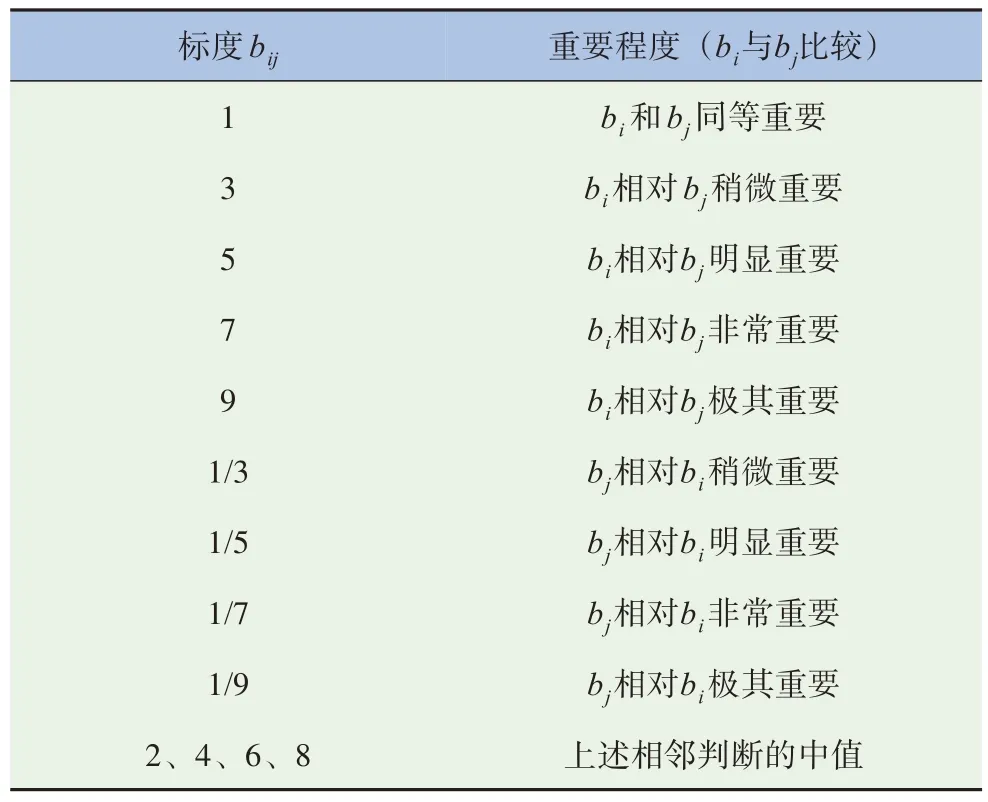
表2 判断矩阵取值含义
为了得到目标层M 相对准则层Z1的判断矩阵A,这里选取了公安部全国道路交通事故统计年报[17]公布的2017 年全国不同天气类型下道路交通事故数据,和文献[19]中的2005~2014 年全国不同天气类型交通事故数据,进行计算确定。
按照良好天气、雨天和雾天统计事故频率,可以得到不同类型天气下的事故比例,结果如图2所示。
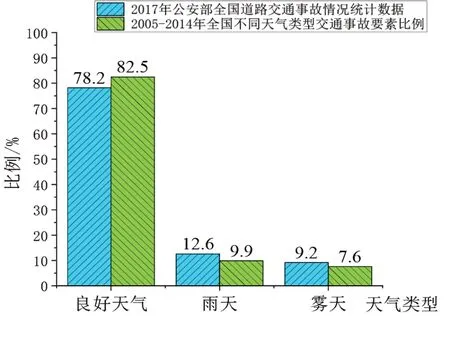
图2 不同类型天气下事故比例
由图2 可知,良好天气、雨天与雾天的事故统计结果形态基本保持一致,据此可确定判断矩阵A的参数取值。由于良好天气的事故比例远远大于雨天与雾天,可认为该因素非常重要;雨天的事故比例稍大于雾天,可认为雨天比雾天稍微更重要。结合表2 中判断矩阵的取值含义,可确定判断矩阵A为:
经计算可得判断矩阵A的最大特征值为3.080 3,其对应的特征向量为(3.979 1,0.753 9,0.333 3),则归一化后向量为(0.785 4,0.148 8,0.065 8)。
为了计算准则层Z1与准则层Z2之间的判断矩阵,以图1 中的雨天场景为例,在参考文献[9]中469 起汽车与两轮车碰撞事故数据中,因骑行者横穿马路事故比例大于骑行者沿路场景比例,可认为骑行者横穿马路场景相对骑行者沿路场景的重要性更显著,因此准则层Z1与准则层Z2之间的判断矩阵B可表示为:
同理,可求得判断矩阵B最大特征值为2.00,最大特征值对应的特征向量为(2.236 0,0.447 2),则归一化特征向量为(0.833 3,0.167 7)。其中的元素分别对应骑行者横穿马路和骑行者沿路场景的权重系数。
为了计算准则层Z2对方案层F 的判断矩阵,以图1 中的雾天行人横穿马路场景为例,在参考文献[20]基于CIDAS 的198 起直行车辆,且速度不超过80 km/h 的碰撞事故数据中,统计了行人近端与远端横穿马路场景的事故占比,结果见表3。

表3 行人横穿马路事故比例
据此建立准则层Z2与方案中F 的判断矩阵C为:
同理,求解可得C的最大特征值为4.010 3,对应的特征向量为(2.059 8,0.638 9,1.189 2,0.638 9),则归一化特征向量为(0.455 0,0.141 1,0.262 7,0.141 1)。
以此类推,可构建其余各层次判断矩阵,得到对应的权重系数。经过计算,良好天气场景下的权重为:0.097 7,0.715 3 和0.187 0。雾天场景下的权重为:0.750 0 和0.250 0;前车静止场景下的权重为:0.192 9,0.701 0 和0.106 1;前车低匀速工况的权重为:0.131 1,0.660 8 和0.208 1;前车制动工况的权重为:0.091 9,0.215 1,0.238 1 和0.454 9;骑行者横穿工况的权重为:0.333 3 和0.666 7;骑行者沿路工况的权重为:0.500 0 和0.500 0;行人沿路场景的权重为:0.500 0 和0.500 0。
2.3 一致性检验
由于判断矩阵是通过同层元素两两比较得到的,难免带有一定程度的主观性,为了保证对多因素问题评价的一致性,减小主观判断带来的影响,使评价结果更可靠,还需要对判断矩阵进行一致性检验。
根据AHP 方法可知,一致性指标计算公式为CI =(λmax-n)/(n- 1),其中λmax为判断矩阵的最大特征值,n为判断矩阵阶数;平均随机一致性指标RI,可用来判别不同阶数判断矩阵的一致性,RI值的确定可参考表4[21]。进一步可得到一致性比率CR = CI/RI,如果CR< 0.10,则表明判断矩阵具有良好的一致性。

表4 平均随机一致性指标RI值
根据前面的计算,已知判断矩阵A的最大特征值为3.080 3,n= 3,计算得CI=0.040 15,查表4可得RI=0.520 0,则CR=0.077 0,由于CR< 0.10,可判断矩阵A具有良好的一致性。判断矩阵B的最大特征值为2.00,n=2,得CI=0,查表4 可得RI=0,则CR=0,由于CR<0.10,可判断矩阵B具有良好的一致性。判断矩阵C的最大特征值为4.010 3,n=4,得CI=0.003 5,查表4可得RI=0.89,则CR=0.003 9,由于CR< 0.10,可判断矩阵C具有良好的一致性。同理,可求得其他判断矩阵的一致性比率CR,结果均小于0.10,均具有良好的一致性。
2.4 评价指标
现有的AEB 系统评价标准和规程多以是否避免碰撞作为评价依据,按照打分要求进行评价。评价指标常采用单一参数,如相对距离或者速度减少量,所以存在片面性,难以全面评价安全性,甚至可能导致错误评价。例如,选取速度减少量作为评价指标,虽然两辆测试车辆制动时刻可能不同,导致制动后的相对距离也不同,但都能避免碰撞,因此最终的评价结果是相同的。如果开始制动时刻较早,制动后的相对距离较远,这种情况可能会影响交通通行效率,导致AEB 系统决策错误,引起频繁制动,因此为了避免类似情况发生,需要考虑多指标的评价方法,全面评价AEB性能。
由于碰撞时间可以判断车辆制动时刻,采用速度减少量可以评价车辆制动效率,采用相对距离可以评价车辆制动安全性,采用最大制动减速度可以评价乘员的舒适性和紧急制动时车辆安全性。因此,本文引入以上4个评价指标对AEB 系统进行综合评价。
1)碰撞时间TTC。TTC 指车辆以当前车速行驶时与前车发生碰撞所需要的时间。TTC 较大时,AEB系统介入早,制动效果好,不易发生碰撞,但会影响车辆的行驶状态,出现频繁制动,降低驾驶员驾驶体验;AEB系统起作用过迟会导致相对距离变短,容易发生碰撞。TTC的计算如式(7)所示。
式中:Drel为两车相对车速;Vrel为两车相对距离。
2)相对距离d。d为被测车辆制动减速停止时与前方目标的纵向距离,一般车辆停止后与前车保持距离为0.50~3.00 m。相对距离越大,制动安全性越好,但是制动时刻过早可能会影响交通通行效率。
3)速度减少量百分比η。车速能直接影响汽车制动安全性, 不同车速造成的伤害不同,SEARSON 等[22]的研究表明,车辆速度减少5%,事故致死率降低30%。为了统一不同车速对安全性的评价,采用速度减少量百分比作为评价指标。η越小,碰撞发生的概率越大,安全性越低。η的计算如式(8)所示。
式中:V0为制动初速度;V1为碰撞速度。
4)最大制动减速度a。a为车辆制动到停止过程中的减速度最大值,反映制动效能。如果紧急情况下制动减速度过小,难以保证车辆的安全性;如果减速度过大,可能导致车辆失控,影响乘员舒适性。
以上4 个评价指标存在相关性,可在使用时根据实际需求赋予不同的权重系数。
2.5 综合评价
评价指标的评分过程可参考相关AEB 评价规程,如速度减少量百分比指标评分可参考C-NCAP管理规范[15]和智能汽车集成系统试验区的AEB 评价规程[23],具体见表5。相对距离评价得分参考中国汽车工程研究院股份有限公司的自动紧急制动系统评分规则[23],具体见表6。其他指标得分可采用类似方法得到。

表5 速度减少量百分比得分表
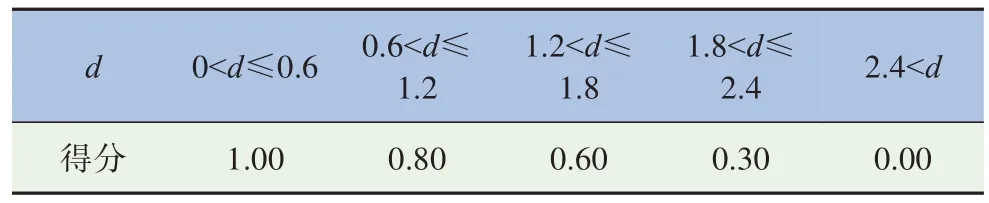
表6 相对距离得分表
单个场景i的测试分数Ti可按式(9) 计算得到。
式中:S为评价所用总分制数值;k为测试场景i的测试车速数量;m为测试车速编号,m=(1,2,…,k);λm,ηm,δm和σm分别对应第m个车速测试时的评价指标TTC、d、η和a的评分;ω1,ω2,ω3和ω4分别对应4个评价指标的权重。
设Total 为综合得分,可按照式(10)对不同场景加权求和得到。
式中:n为测试场景总数;αi为不同场景的权重。
最后,根据综合得分按照表7 对AEB 系统进行等级评定。

表7 评价等级表
3 AEB系统测试方案仿真应用和评价
为了验证AEB 系统综合评价方法,以图1 中的部分场景为例,设计AEB 系统仿真测试方案进行评价。
3.1 AEB系统测试方案
AEB系统通过传感器感知自车周围环境,根据算法判断是否会发生碰撞,当检测有碰撞危险发生时,系统自动制动避免碰撞或者减少碰撞时的车速。这里测试车辆选用PreScan 中的Audi_A8 Sedan,搭载的AEB 系统采用基于TTC 的控制策略,其控制逻辑为:TTTC> 3.00 s,系统不制动,但会有声音警告;当0.75 s <TTTC≤ 3.00 s时,系统持续发出制动警告并进行部分制动;当TTTC≤ 0.75 s时,AEB系统完全制动。
被测车辆装有毫米波雷达,可以测量前后两车的车速、距离等信息,并被传递给AEB 系统。毫米波雷达在雨雾等不同环境中性能会有衰退,导致汽车的环境感知能力降低,如雨会吸收毫米波,且随着雨速、雨滴大小、分布、温度频率和路径的变化而变化,因此本文参考PreScan 中大雨天气的衰减强度,设置传感器衰减强度为3.835 dB/km,大雨天气雨滴垂直速度4.70 m/s,直径1.23 mm,密度为452.00 particles/m3。同样雾也可使毫米波衰减,但通常衰减量比雨小,这里设置为3.000 dB/km,雾天能见距离200 m。
这里按照天气类型,选取了3 个典型测试场景,参考C-NCAP 管理规程,确定不同场景下被测车辆的车速范围和大小与两轮车、行人的速度,给出雨雾天气下的AEB 系统测试方案,其他场景与此类似。
3.1.1 前车静止场景测试
良好天气下,前车静止场景50%偏置,车速为20、30、40、50 km/h的测试结果如图3所示。TTC的变化可由式(7)计算,由图3 中可知,各个测试车速下的TTC 和相对距离d的最小值都随着测试车速的增加而减小;在相对距离d保持之后,车速趋近于0 时,TTC 瞬间增大。在该场景下测试车辆均未发生碰撞,且测试车辆停止后与前车保持了一定的安全距离。
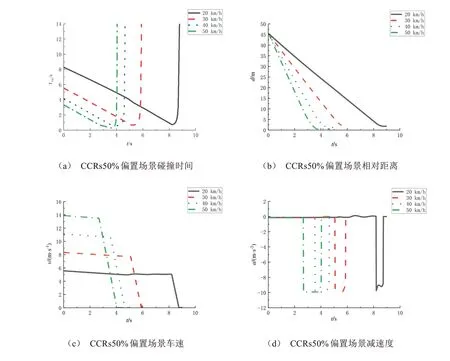
图3 前车静止场景测试结果
3.1.2 骑行者沿路场景测试
雨天骑行者沿路场景25%偏置,车速为30、40、50、60 km/h 的测试结果如图4 所示。由图4可知,各个测试车速下TTC 和相对距离d的最小值也都随着测试车速的增加而减小,测试车辆在30、40、50 km/h的车速下均能避免与骑行者发生碰撞,相对距离分别为1.60、1.12、0.65 m;在60 km/h 的测试车速下,车辆已经无法避免碰撞,此时速度减少了60%,可有效减轻碰撞带来的危害。此外,图4b的相对距离会有所上升,这主要是由于骑行者在被测车辆停止时,仍然会保持当前的速度继续行驶所致。
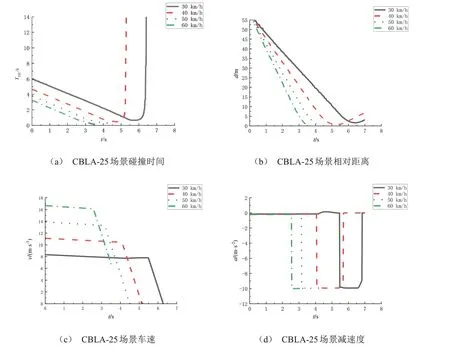
图4 骑行者沿路场景测试结果
3.1.3 雾天行人远端横穿场景测试
雾天行人远端横穿25%偏置场景,车速为20、30、40、50、60 km/h的测试结果如图5所示。由图5可知,在0~2 s 内,由于雾天能见度低以及行人体积相对较小,AEB系统的传感器未能检测到横穿行人,所以TTC 保持在默认值20 s。由测试结果图5b可知,车辆在20、30、40、50 km/h 的车速下能安全制动,避免与横穿行人发生碰撞。当车速超过60 km/h 时,此时相对距离已经为0,表明发生碰撞;由图5c 可知,碰撞时刻车速为6 m/s,但是速度减少了60%,能有效减轻碰撞对行人的伤害。

图5 行人横穿场景测试结果
3.2 AEB系统测试综合评价
AEB 系统综合评价方法综合了不同天气类型、场景和指标相互之间的重要程度,可以系统地评价AEB系统。为了说明测试评价过程,根据构建测试场景时考虑的天气类型,事故对象与偏置情况等因素,选取良好天气下的前车静止场景CCRs-50(场景A)、雨天骑行者横穿马路CBNA-50(场景B)、骑行者沿路CBLA-25(场景C)、雾天行人横穿CPFA-25(场景D)和行人沿路CPLA-50(场景E)等5个测试场景进行综合评价。
按照AEB 系统综合评价方法,根据2.2 节构建判断矩阵,计算各个场景的权重,得到αi分别为0.39、0.30、0.09、0.16 和0.06;分场景进行测试,可得到5 种场景下的碰撞时间、相对距离、速度减少量百分比和最大制动减速度;按照2.5 节进行综合评分。
由于主要考虑制动安全性,所以速度减少量指标最重要,最大制动减速度重要度最小,而相对距离与TTC同等重要,介于中间程度。据此可构建评价指标的判断矩阵E为:
经计算,可得ω1= 0.23,ω2= 0.23,ω3= 0.45和ω4= 0.09。这里采用十分制,按照2.5 节评分方法,参考相关AEB 系统评价规程,分别按4个指标进行评分,然后根据式(9)可得到场景i的测试分数Ti,见表8。
根据式(10)得到综合评分STotal=6.610 7,根据表7可得到评价结果为良好。
而按照采用单一指标进行评价,如速度减少量,经计算最终得分为9.015 0分,由表7可知,属于优秀水平。
这种偏差是由于单一指标评价AEB 系统的不足导致的。由于仅考虑一个速度减少量指标时,只要速度减少量相同,则相同场景下的评价得分就会相同。此外,在本次测试中,发现雨天雾天场景中多次发生碰撞,难以支撑AEB 系统为优秀的评级,因此,采用单一指标得到的评价结果难以客观地反映AEB系统的实际性能。
因为本文所提出的AEB 系统综合评价方法,不仅考虑了评价车辆制动效率的速度减少量,而且考虑了判断车辆制动时刻的碰撞时间,评价车辆制动安全性的相对距离,以及评价乘员的舒适性和紧急制动时车辆安全性的最大制动减速度,同时该方法也考虑了测试场景的权重,避免了简单测试场景得分偏高而复杂测试场景得分偏低的问题,所以评价结果更准确、更客观。
4 结论
针对当前AEB 系统测试评价存在复杂气象因素考虑不足和评价结果难以客观反映AEB 系统实际性能的问题,构建了AEB 系统测试场景,提出AEB系统综合评价方法,研究了测试方案的仿真应用和评价,具体结论如下。
1) 根据NAIS 数据并参考C-NCAP(2021),综合考虑天气因素对AEB 系统的影响,给出了良好天气、雨天和雾天的7类共17个AEB测试场景。
2)利用AHP 建立AEB 系统评价层次模型,确定判断矩阵,计算权重系数,引入碰撞时间、相对距离、最大制动减速度和速度减少量百分比等4 个评价指标,提出了AEB系统综合评价方法。
3)在PreScan 平台上搭建了测试场景,应用AEB系统综合评价方法对被测车辆进行评价,与单一的速度减少量百分比评价结果进行对比,验证了方法的有效性,并剖析了其评价结果更客观和更准确的原因。
上述结论是在理论分析和仿真试验的基础上得到的,基于构建的测试场景,开展实车测试验证AEB系统综合评价方法,是后续研究的主要工作。
猜你喜欢
中老年保健(2021年11期)2021-08-22 03:16:26
意林(2021年5期)2021-04-18 12:21:17
小哥白尼·趣味科学画报(2020年4期)2020-10-20 06:30:56
文苑(2020年7期)2020-08-12 09:36:38
扬子江(2019年1期)2019-03-08 02:52:34
动漫星空(兴趣英语)(2018年9期)2018-10-30 05:50:34
汽车维护与修理(2018年1期)2018-04-04 01:13:22
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33