基于能量转移理论的行车风险量化建模方法研究
2023-10-12 04:28:28郑讯佳李会兰胡孟夏张强陈华赵树廉高建杰
汽车工程学报 2023年5期
郑讯佳, 李会兰, 胡孟夏, 张强, 陈华, 赵树廉, 高建杰
(1. 中国汽车工程研究院股份有限公司,重庆 401122;2. 重庆文理学院 智能制造工程学院,重庆 402160;3. 重庆城市职业学院 信息与智能制造学院,重庆 402160;4. 中汽院智能网联研科技有限公司,重庆 401122;5. 智能警务四川省重点实验室,四川,泸州 646000)
行车风险受到人-车-路三方面中多种因素的综合影响。由于道路交通复杂,路况多变;驾驶员特性各异,行为不定;车辆系统复杂,性能耦合,使行车风险具有时变、复杂和耦合的特性。行车风险的辨识和评估技术能帮助驾驶员提前识别风险,降低交通事故的发生率和伤亡率,缓解严峻的行车安全现状。
现有研究对风险的定义,其一是将风险视为某一系统内有害事件或异常事件发生的可能性;其二是把风险定义为某一事故产生的后果和该事故发生概率的乘积[1]。研究人员通常用描述碰撞的参数对行车风险进行定量评估,主要有基于事故分析的风险评估方法、基于车辆运动学的风险评估方法和基于人工势能场的风险评估方法。
其中,基于事故分析的风险评估方法,通常采用计算单位里程事故率(死亡率)、百万辆车事故率(死亡率)、百万人事故率(死亡率)、十万人口死亡率、亿车公里事故率(死亡率、受伤率)、当量死亡率和综合事故率等事故统计指标,以评估道路环境中车辆运行的安全情况[2-3]。这类方法通常依赖海量历史事故数据,属于事后评估方法,难以及时评价行车过程中的动态风险,难以刻画当前行车安全水平,同时该方法所依赖的道路碰撞数据通常还存在报告不足、样本均值低、行为信息有限和遗漏变量偏差等缺点。基于车辆运动学的风险评估方法,通常考虑空间和时间上的安全距离,如保证行车安全的车辆间最小距离[4]、临界安全距离[5]、碰撞剩余时间(Time to Collision,TTC)[6-7]、碰撞剩余时间的倒数(inverse Time to Collision,TTCi)[8]、车头时距(Time Headway,THW)[9]等。基于车辆运动学的风险方法由于简洁方便,得到了广泛的应用,从20 世纪90 年代开始,本田、马自达、捷豹等国际汽车企业均应用此类方法分别为各自的汽车产品开发了辅助驾驶算法,并促使对驾驶安全辅助算法的相关研究进入高速发展期。然而,这类方法通常单独对车辆行驶的纵向或横向上的风险状态进行量化建模,难以应对一些复杂的行驶场景[10]。为了实现车辆行驶过程中的纵横向风险耦合评估,研究人员开始采用人工势能场来描述车辆与周围环境的相互关系和风险程度。HSU 等[11]采取与车辆安全间隙的引力和周围其他车辆的斥力建立了引力跟车模型。MATSUMI 等[12基于人工势能场实现了交叉路口车辆对行人的避撞行为,实现了对交叉路口场景中易受伤害道路使用者的保护。RAKSINCHAROENSAK 等[13]采用弹簧模型研究车辆与行人之间的行车风险,设计用于交叉路口的驾驶安全辅助系统,但所提出方法的应用场景有限,而且模型适应性尚待提高。SATTEL 等[14]利用势能场理论设计车辆路径规划算法,实现智能汽车的车道保持和避撞系统功能,还实现了对静止障碍物和运动障碍物的区分。LI Linheng 等[15]提出的人工势能场函数中的排斥场包含多个组成部分,包括道路边界势、车道势和障碍物势,这些组成部分组合在一起,成为完整的风险图。虽然最初的应用主要集中在自动化车辆上,但一些研究人员已经尝试将这一概念用于人类驾驶车辆的安全建模。清华大学王建强团队[10,16]意识到,为了可靠地模拟人类驾驶车辆的个人碰撞风险,需要在安全领域功能中考虑与驾驶员、车辆和道路相关的各种风险因素,并确定了行车安全场的3 个组成部分:势能场、动能场和行为场。但模型中参数众多,难以标定,在实际应用中存在一定局限性。
综上可知,行车风险量化建模是开发智能驾驶辅助系统算法的关键环节,国内外学者对于行车风险的评估已经开展了大量的研究,但是仍存在较多不足之处。为了减少模型的待定参数,简化模型,本文从能量转移理论出发,结合车辆运动学约束,基于车辆的行驶轨迹分析行车风险的分布并量化车辆行驶过程中的行车风险,该方法将为汽车智能安全技术研究提供新的思路。
1 能量转移理论分析
1961 年,吉布森(Gibson)提出:事故是不正常的或不期望的能量释放的结果。1966 年,哈登(Haddon)引申了上述观点并提出人受伤害的原因只能是某种能量的转移,并提出了能量逆流于人体造成伤害的分类方法。第一类伤害是由于施加了超过局部或全身性的损伤预知的能量而产生的,如机械伤害、烧伤等。第二类伤害是由于影响了局部或全身性能量交换引起的,如由机械因素或化学因素引起的窒息(常见的有溺水、一氧化碳中毒和氰化氢中毒等)[17]。
系统安全工程研究认为,事故的根本原因是存在危险源。通过控制和消除系统中的危险源可以防止意外事故的发生[18]。通常危险源可以分为两类,其一是系统中可能意外释放的能量或危险物质;其二是指导致能量或危险物质约束失效的各种不安全因素,主要包括系统故障、人为失误和环境因素[18]。
道路交通事故中碰撞过程的本质是运动物体所具有的能量(如动能、化学能等)转化为其他形式的能(如热能、弹性势能等),并造成弹性、塑性形变的过程。能量转移理论认为:事故是能量的不正常转移[19]。在交通系统中,运动物体(如车辆、骑车人、行人)都具有动能,车辆从起步开始加速至某一速度的过程实际上是自身动能不断增长的储能过程,若在某一时刻与某一物体发生碰撞,则其储存的能量将释放和转移并导致弹性和塑性变形,那么在碰撞过程中,动能越大造成的损害就越大。
因此,可以根据上述定义方便地分析道路运输系统中的危险源。第一类危险源包括车辆的动能、燃料和危险化学品等危险物质;第二类危险源包括人的失误、机械故障、恶劣路况、恶劣天气等。
2 量化行车风险的基本模型
根据对能量转移理论的分析可知,只要确定出交通系统中的危险源,就能根据危险源的能量释放可能的途径去分析风险的演变趋势。
在交通系统中,每一个道路使用者都包含动能,包括车辆、行人和骑车人等。因此,可以根据移动物体的动能值来描述交通风险的程度。对于单个运动物体,其动能可以表示为:
式中:Ei,mi,和vi分别为道路使用者i的动能、质量和运动速度;Δxi为道路使用者i正前方某一点与i的距离。Ei的单位为J,Δxi的单位为m。令:
式中:Fi为携带能量为Ei的道路使用者i对其运动方向上的道路交通环境造成的风险作用力,单位N。
如果不考虑方向性,假设作用力Fi在任意方向上的影响相同,即存在各向同性,取mi= 1 000 kg,vi= 20 m/s,道路使用者坐标为Oi=(0,0),则该道路使用者对外界产生的风险可以用图1表示。
3 考虑车辆动力学约束的行车风险模型
对于在道路交通环境中正常行驶的车辆而言,其在运行过程中对交通环境造成的行车风险不具有各向同性,显然,车辆对其运动方向正前方的行车风险最大。即行车风险存在其既定的影响范围。
行车风险是由车辆和道路交通环境的相互作用而产生,它与车辆的运动状态和道路环境条件有关。假设驾驶车辆的驾驶员始终遵守道路交通环境中的交通规则和法规,且车辆行驶时其速度恒定,当车辆转向时其转向角也恒定。此外,根据车辆动力学可知,车辆在某一速度下维持稳定行驶的最大转向角存在极值。因此,考虑车辆动力学约束下,车辆对外界的风险具有特定的范围。
如果用R(t)表示车辆的转弯半径,则有:
式中:K为稳定性因素;L为车辆i的轴距;δ为转向角。
假设车辆始终受控并稳定行驶,则其速度和转弯半径的最大值取决于道路条件。车辆的运动状态将服从式(5)~(7)。
式中:FX和FY分别表示车辆轮胎所受的纵向力和横向力;FZ为地面支撑反力;φ为路面附着系数;f为滚动阻力系数;CD为空气阻力系数;A为车辆的迎风面积。
因此,车速vi与车轮转角δ之间的关系满足式(8):
式中:W=CDA/21.15;
随着车辆行驶速度的增加,车辆动力学约束下所允许的转向角按照式(8)减小。同时,车轮转角δ取决于车辆的机械结构。最大值等于转向角极限δmax。对于乘用车,通常有δmax∈[-π/4,π/4]。显然,|δ(t)|≤δmax。
因此,车辆在运动过程中,其可能运动的轨迹范围存在一定的边界,即存在转向的左极限和右极限,在此极限边界内车辆为稳定状态,反之则车辆失去稳定性,即可能出现翻车的情况。
假设驾驶员在行车过程中转动转向盘的概率服从一定的概率分布,如果转向角和转向概率分别为δk和pk,则有:
式中:k∈[-n,n],k,n∈Z;Δδ为转向角的增量。此外,δ0表示直行,如果k为正整数,δk表示左转,否则δk表示右转。
显然,车辆在不同的工况下的转向概率不同,比如在高速公路等车道曲率变化小的道路行驶过程中,驾驶员转动方向盘的幅度小,只在换道过程中会有较大幅度的转向行为,但行驶在盘山公路等车道曲率变化较大的环境中则相反。无论道路曲率大还是小,都可以通过Frenet 坐标的变换,将曲线道路变换为直行道路,这一技术通常被应用于轨迹规划中[20]。本研究利用项目组采集并建立的i-VISTA中国自然驾驶数据库对驾驶员转向的概率进行分析,该数据库共采集了50 名驾驶员自由行驶过程的数据,包括:GPS 信号数据、前向车载摄像头数据、前向毫米波雷达数据、激光雷达数据和车辆的CAN总线数据,累计里程达100万公里。
⑤经常饮用的碳酸饮料,不仅含有大量的糖分(大量糖分导致抑制眼球增长的有效物质减少),还能使体内钙减少,导致巩膜中钙的含量下降,使眼球壁失去正常的弹性,眼球容易被拉长,眼轴增长过快,易引发近视并加快近视度数增长。
本研究从数据库中随机抽取了6 天不同时段2 500 km 的车辆行驶数据,对应280 个数据段和11 200 min 的驾驶数据。该区域覆盖了城市道路和环城高速公路,大部分为道路曲率变化小的直行道路场景,其中涵盖了跟车和换道等场景。对数据进行拟合获得以概率密度函数,如式(11)所示。
由式(11)可知,车辆保持直行(即k= 0 时)的概率最大,由于车轮转角处于不同的角度的概率不同,所以行车风险对各个方向上的影响也显然不同。为了量化恒定车速下不同车轮转角对道路交通环境所造成的行车风险差异,结合式(2),定义考虑车辆行驶动力学约束的行车风险为:
式中:
取mi= 1 000 kg,vi= 20 m/s,道路使用者坐标为Oi=(0,0),则该道路使用者对外界产生的风险如图2所示。
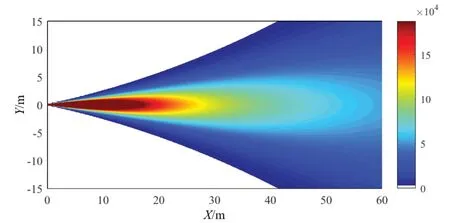
图2 风险作用力分布图(考虑车辆动力学约束)
如图2 所示,把车辆看作Oi=(0,0)处的一个质点,运动方向为X轴的正方向。图中白色扇形区域为车辆在动力学约束下不能正常行驶到达的区域,因此,这部分的风险作用力的值为0,即车辆对这部分区域不产生行车风险,这不仅符合车辆的运动学规律,也符合人对行车风险的主观感受。另一个值得说明的特点在于,车辆直行时,在20 m以内的正前方,行车风险较高,计算该区域的碰撞时间TTC 可知,该区域的TTC ≤1 s,属于危险区域。相比图1 所示的各向同性的行车风险模型,考虑车辆动力学约束的行车风险模型更加准确。
4 仿真试验
为了验证模型的有效性,针对换道超车场景设计了以下2 个场景,如图3 所示:场景1 为跟车场景,自车(ego vehicle)为后车,坐标为(5,6),速度ve= 12 m/s,前车(other vehicle 1) 坐标为(19,6),速度为vo1= 10 m/s;场景2 在场景1 的基础上增加了邻车(other vehicle 2), 坐标为(17,2),速度为vo2= 10 m/s。
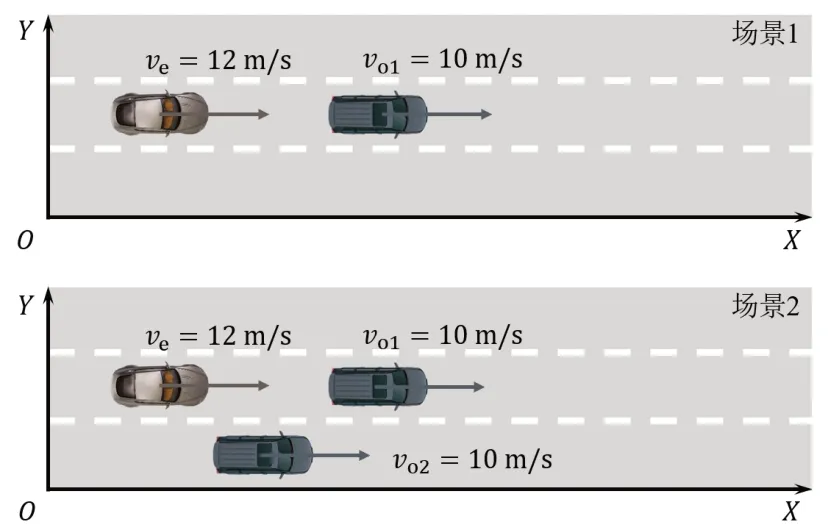
图3 仿真试验场景
设置每辆车的质量均为me=mo1=mo2=1 500 kg,根据式(12),利用Matlab 进行仿真分析,得到的结果如图4所示。

图4 仿真结果
图4a 显示的是场景1 当前状态的风险情况。根据场景设置可知,自车和前车相距14 m,如果保持该运动状态,7 s 后自车将追尾前车。同时,由图4a 可知,两车各自产生的行车风险处于叠加状态,整个交通环境中的风险明显升高;当自车选择右转向,如图4b 所示,则两车各自产生的行车风险分离,道路交通环境中的整体风险明显有所下降。
图4c 显示的是场景2 当前状态的风险情况。同样,根据场景设置可知,自车和前车相距14 m,若保持该运动状态,7 s 后自车将追尾前车。此外,由于邻车的存在,与图4a 相比,观察x∈[30,60]区间内的道路风险情况发现,3 辆车各自产生的行车风险的叠加造成场景2 中的道路交通风险明显高于场景1,当前道路交通环境风险相比场景1 更大。此时,当自车选择向左转向,如图4d 所示,整个道路交通风险情况明显下降。
通过计算上述2 个场景当前状态的风险情况,以及自车通过改变运动状态能避开风险,使道路交通环境风险整体降低,验证了风险建模的准确性。
把上述两个场景各自对应的两个状态用状态1~4 表示。其中,状态1 对应场景1(危险状态);状态2 对应场景1(自车转向避险);状态3 对应场景2(危险状态);状态4 对应场景2(自车转向避险)。分别计算4 个状态下图示环境中行车风险的均值和方差,获得的结果如图5所示。
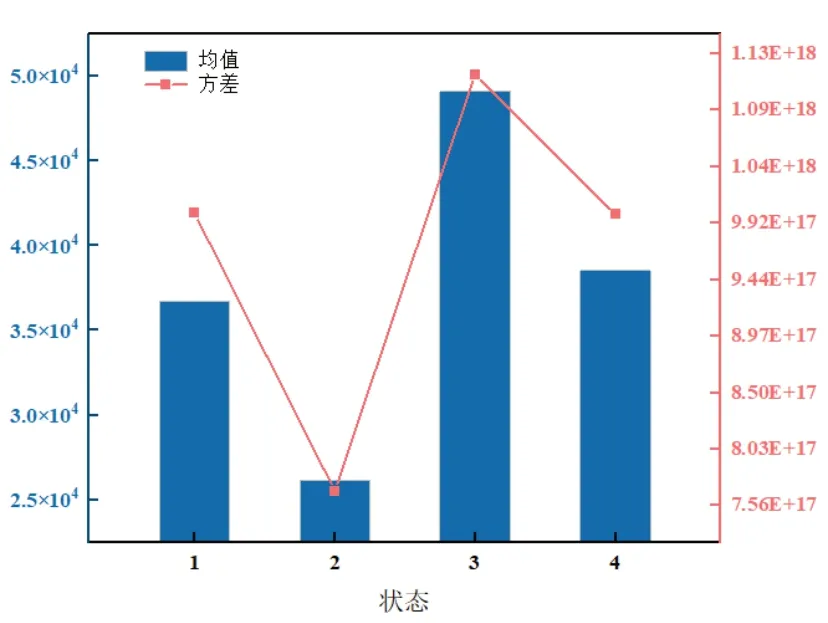
图5 行车风险均值和方差
由图5 可知,自车转向避险的状态(状态2、状态4)相比对应的危险场景(状态1、状态3),行车风险的均值和方差都有明显下降。说明自车转向避险的行为使转向行为之前的危险场景的危险状态获得了缓解。
为了进一步验证模型的有效性,针对近距离匀速行驶、小相对速度靠近、大相对速度靠近3 种场景进行分析。在本部分仿真中,基于图3 中的场景1 进行了扩展。设置前车速度为vo= 20 m/s,自车分别以ve= 20 ,25 ,30 m/s 的跟车速度行驶。如图6所示,场景3表示两车近距离匀速行驶;场景4表示小相对速度靠近;场景5 表示大相对速度靠近。分别计算前后车距为40 m 和20 m 时,图示环境中交通风险的均值和方差。
同样,将上述3 个场景各自对应的两个状态用状态1~6 表示。其中,状态1 对应场景3(车距40 m);状态2 对应场景3(车距20 m);状态3 对应场景4(车距40 m);状态4 对应场景4(车距20 m);状态5 对应场景5(车距40 m);状态6 对应场景5(车距20 m)。分别计算6个状态下图示环境中行车风险的均值和方差,获得的结果如图7所示。
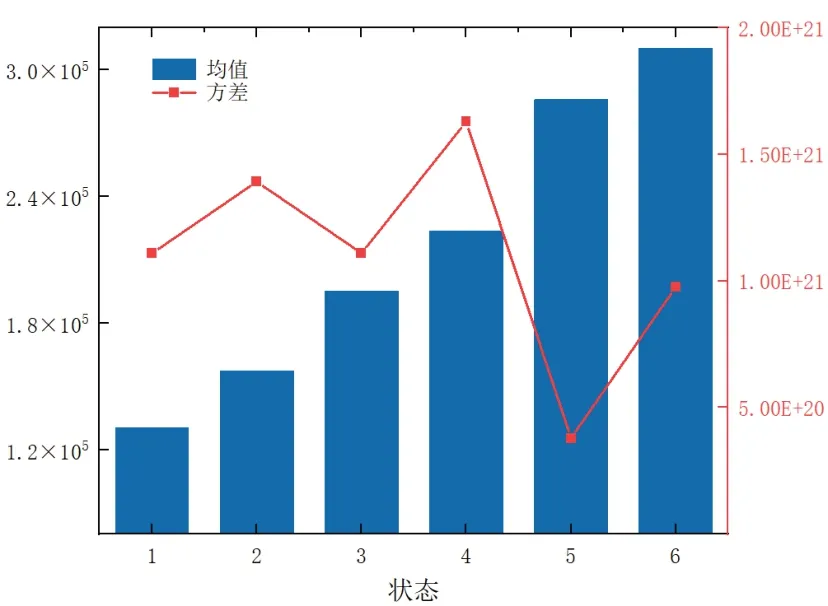
图7 行车风险均值和方差
对比3 个场景各自的两个状态可以看出,3 个场景中车距40 m 时行车风险的均值和方差都比车距20 m 时的均值和方差大。当车距相同时(40 m或20 m),场景3、4、5 行车风险的均值呈现随自车速度增加而增加的趋势。计算6 个状态的车头时距,见表1,可以看出,按照THW,状态1、3、5的风险分别小于状态2、4、6;在同样的车距下,场景3 风险小于场景4 风险,场景4 风险小于场景5风险。THW 分析结果显示,6个状态的危险程度与行车风险均值方差分析结果吻合。

表1 六个状态的THW
5 结论
本文提出了一种基于能量转移理论的行车风险量化建模方法。利用车辆携带的动能推导了车辆对道路交通环境或其他道路使用者产生的行车风险。同时,考虑车辆动力学因素,通过计算确定车辆的可行驶区域,确立了行车风险的影响范围。风险作用力分布图显示,行车风险由车辆的速度和转向角等车辆的运动状态决定,并且还与道路附着系数、滚动阻力系数和空气阻力系数等道路交通环境条件有关。由仿真分析结果可知,道路交通风险的产生是由于道路交通环境中各个车辆所产生的行车风险交织,引起风险累积叠加造成的,缓解道路交通风险可以考虑通过避免行车风险的大规模叠加,使行车风险的分布向分散的趋势演变,避免风险累积集中。未来研究将通过综合考虑人-车-路相互作用对行车风险进行详细建模,尝试刻画风险作用力对道路交通环境中每个道路使用者的危险程度。同时,基于能量转移理论的行车风险量化建模方法将开发实用的驾驶辅助算法和自动驾驶算法。
猜你喜欢
当代陕西(2022年4期)2022-04-19 12:08:50
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
商用汽车(2021年4期)2021-10-17 02:04:15
青年歌声(2020年12期)2020-12-23 06:30:00
现代园艺(2018年2期)2018-03-15 08:00:16
汽车与安全(2017年5期)2017-07-20 10:58:34
汽车与安全(2017年3期)2017-04-26 01:25:29
汽车与安全(2016年5期)2016-12-01 05:22:12
读写算·高年级(2015年1期)2015-07-25 02:22:00
汽车维修与保养(2015年12期)2015-04-18 07:51:46