
基于AI视觉技术的电力设备检测方法
2023-10-12 09:41李杨董元龙林明晖高明岳衡丁靖
微型电脑应用 2023年9期
李杨, 董元龙, 林明晖, 高明, 岳衡, 丁靖
(国网浙江省电力有限公司宁波供电公司,浙江,宁波 315000)
0 引言
由于电力设备结构复杂、散布范围广,电力设备发生故障时,不良数据量大,难以及时抢修,影响电力的恢复进度,因此对电力设备进行及时检测至关重要。现存的电力设备检测方法如:孙海铭等[1]提出了电力设备双通道图像智能检测方法,主要是从单通道和双通道2个途径进行电力设备检测,缺乏对图像清晰效果的考虑,导致检测效果不理想;王旭红等[2]提出了基于改进SSD的电力设备异常检测方法,该方法受外部环境影响程度较大,已经不能满足电力设备检测的完整性;高明等[3]借助深度学习强大的识别与检测能力,分析了电力设备的单目危险关系和成对对象间潜在的二元危险关系,在电力场景下,电力设备作业的危险描述与作业预警,但是其难以保证及时恢复供电;吴双等[4]提出了一种电网智能特征选择方法,采用包装方法和反向搜索策略,利用信息论和数据挖掘技术,智能地选择关键特征,实现了在电力系统安全稳定评估场景中的综合应用,但是其数据适应度波动大。
由于变压器、断路器、电能表等物理形状各不相同,刀闸、电流互感器等电力设备的指示灯变化复杂,随着环境光照的变化,色彩信息量丰富。相机采集的电力设备图像是 RGB 颜色形式,图像纹理的局部变化程度较大,向量维数较大,视觉图像奇异特征较多,导致电力设备异常检测难度较大。结合以往研究方法的局限性,本文提出基于AI视觉技术的电力设备检测方法,该方法能够通过视觉技术拍摄获取清晰电力设备图像,结合AI(人工智能)技术实现电力设备检测。该方法既考虑了图像的清晰度,又增强了电力设备的检测效果。
1 AI视觉技术在电力设备检测中的应用
1.1 基于视觉技术的电力设备图像采集
基于视觉成像原理的三目立体视觉系统主要由摆设方向相同、距离相同的3个摄像机构成。在电力设备检测中,需要对电力设备进行表面3D信息采集,本文采用该系统对需要检测的电力设备进行拍摄。具体原理如图1所示。
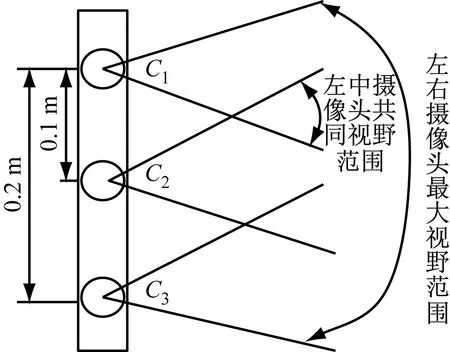
图1 三目立体视觉系统
图1中,C1、C2、C3分别为左边摄像机、中间摄像机和右边摄像机。其中,C1和C2的距离为0.1 m的窄基线,C1和C3的距离为0.2 m的宽基线。两条基线各有其特点,窄基线能够对C1和C2共同覆盖的视野范围进行扩大,在有限的距离内,视野更广是宽基线的特点。该系统的主要工作原理是通过摆放位置不同的3个摄像机从多角度拍摄电力设备图像。
1.2 电力设备视觉图像的奇异特征提取
基于三目立体视觉系统拍摄到的电力设备图像,采用边界特征融合法对电力设备视觉图像进行边缘轮廓检测,结合特征分解和尺度模板匹配提取视觉图像的奇异特征,便于后期电力设备检测[5],过程如下。
采用颜色梯度分解方法进行视觉图像范围融合处理,得到处理后的视觉图像范围融合Snake函数公式为
(1)
式中,Eint(vi)和Eext(vi)分别为电力设备视觉图像内部和外部范围融合值。通过三维空间重构方法,进行电力设备视觉图像异常特征点定位,得到的拓扑结构分别用x1、x2、x3和x4向量量化函数表示:
(2)
式中,m为相邻区域内的电力设备视觉图像边缘分割尺度[6-8]。与视觉图像相近的尺度信息为
(3)
式中,sin(theta)、cos(theta)分别为正弦、余弦尺度参数。获取边缘像素点的特征量依据像素特征分解技术对电力设备视觉图像的像素进行融合处理[9],即可得到:
(4)

(5)
式中,dist(xi,xj)为xi和xj之间的距离,以此完成特征分解。
设参数σ为电力设备视觉图像的拆分模块匹配阈值,利用噪点密度分布规律,结合像素重组,重新绘制三维图像,进行纹理区域分割,分割函数为
(6)
式中,Vd(Y,βi)和θ分别为分割得到的像素点信息和灰度直方图信息。采用范围分割方法分割视觉图像特征,得到特征分布矩阵为
(7)
依据式(7)计算图像中各像素点的灰度值,得到电力设备视觉图像分割的相邻区域内像素值为
Eext(V(i))=γ(i)Eimage(V(i))+δ(i)Econ(V(i))
(8)
式中,Eimage和Econ分别为梯度信息和逆向梯度信息,两种信息的清晰度分别用γ(i)和δ(i)表示。以相邻区域内像素值清晰度对比过程进行边缘像素点匹配,即完成相似的特征模板与电力设备视觉图像特征的匹配。
1.3 基于AI技术的电力设备检测模型
1.3.1 深度神经网络
深度神经网络作为一种AI技术,对电力设备检测具有重要意义。深度神经网络(DNN)根据人类的认知范围选择分析事物的看法,得到具有层次分明、非线性,并且不同层级蕴含不同特征的网络结构,该模型能够较好地解决存在浅层神经网络的疑难问题。深度神经网络具体结构如图2所示。

图2 深度神经网络的基本结构
图2中,ω和b分别为不同层次之间的权值和阈值,z为输入层点与ω和b两个值的计算结果,通过激活函数计算的结果用aj、ak、al表示。DNN主要是对产生的误差进行迭代次数训练,降低误差对权值和阈值的影响,最大程度上发挥神经网络的作用。
深度神经网络的具体方法过程如下。
(1)对DNN进行初始化设置,设迭代次数和最小误差分别为k和ε。
(2)G={(x1,y1),(x2,y2),…,(xm,ym)}为DNN训练数据样本,ϑ为激活函数,通过特征向量x计算传播过程中每层的输出,如aL表示第L层输出具体计算公式如下:
(9)
式中,zl为底层奇异特征权值,bl为初始化层次之间阈值,al为不变矩形状特征权值。
(3)利用最后一层得到的输出结果,与实际输出结果通过损失函数进行比较,神经网络的损失函数用均方差Q表示:
(10)
(4)判断k和ε是否符合条件,当不符合条件时,进行逆向传播计算,计算不符合条件产生的输出误差,计算公式如下:
(11)
(5)利用式(12)、式(13)求取更新权值和阈值的偏导:
(12)
(13)
(6)利用式(14)、式(15)对每层权值和阈值进行参数化更新:
(14)
(15)
(7)当两者达到设定要求时停止训练,得到检测模型。
通过上述方法,可知深度神经网络对事物的辨析能力和异常情况有较强的表现能力,模拟分析各种复杂多样的异常情况,提高电力设备异常情况决策的准确度和便利性。
1.3.2 电力设备检测流程
通过对采集到的视觉图像进行仔细分析挖掘,得到电力设备的奇异特征,对该特征进行电力设备类型定义,依据提取到的奇异特征构建训练集和测试集,分别对基于深度神经网络的电力设备检测模型进行训练和测试,实现电力设备检测。
从图3可以看出,特征提取到建立数据集是检测电力设备的过程。由此,实际拍摄图像生成样本集,以其Harris角点不变矩作为基于关键点的不变矩形状特征,若直接通过原图像对数据集进行模式匹配和分类检索,向量维数较大,难度较大,所以抽取图像底层的特征构建数据集,成为图像奇异特征提取的关键步骤。通过提取到的奇异特征建造数据集对DNN模型进行训练,最终输出电力设备检测结果。

图3 电力设备检测流程图
深度神经网络中的激活函数ϑ是对每层输出结果进行计算来提高模型模拟能力的。常见的激活函数有Sigmoid、tanh和ReLU。Sigmoid和tanh两种函数受DNN影响较大,当DNN深度增加时,梯度不断下降,甚至消失,影响训练效果,因此ReLU函数是使用最广的函数。ReLU函数的劣势是要提前对学习率进行设置,否则在进行首次权重更新时,输入值小于0,输出值将全部为0,甚至影响反向传播时梯度,与ReLU相关的神经节点将不会动作,权重停止更新,导致DNN不再学习。为避免此类问题发生,提出激活函数L-ReLU[Leaky ReLU,f(x)],表达式为

(16)
其中,a为一个很小的整数,当x>0时,ReLU函数值等于0,但L-ReLU的梯度值较小。
2 实验分析
为了验证本文方法对电力设备检测的有效性,选取某区域电力设备为实验对象,采用本文方法对电力设备进行多次拍摄,得到3组电力设备图像,并用于实验分析。将本文方法与电力设备双通道图像智能检测方法(文献[3]方法)和基于改进SSD的电力设备异常检测方法(文献[4]方法)进行平均适应度对比分析。
2.1 视觉图像奇异特征提取效果
采集到的原始电力设备视觉图像如图4所示。运用本文方法提取电力设备视觉图像的奇异特征点,得到检测图像如图5所示。

(a) 原始检测图像1

(a) 提取结果1
图5中,白色方框内即为本文方法奇异特征提取结果。通过上述结果可知,本文方法不仅能有效实现视觉图像奇异特征提取,而且图像提取的清晰度较高。因此,本文方法的电力设备奇异特征提取效果较好,可为检测电力设备提供便利。
2.2 电力设备检测适应度情况
为了保证实验的可信性,在保证参数、激活函数、阈值、温度等相同的条件下,对3种方法的平均适应度进行比较分析,如图6所示。
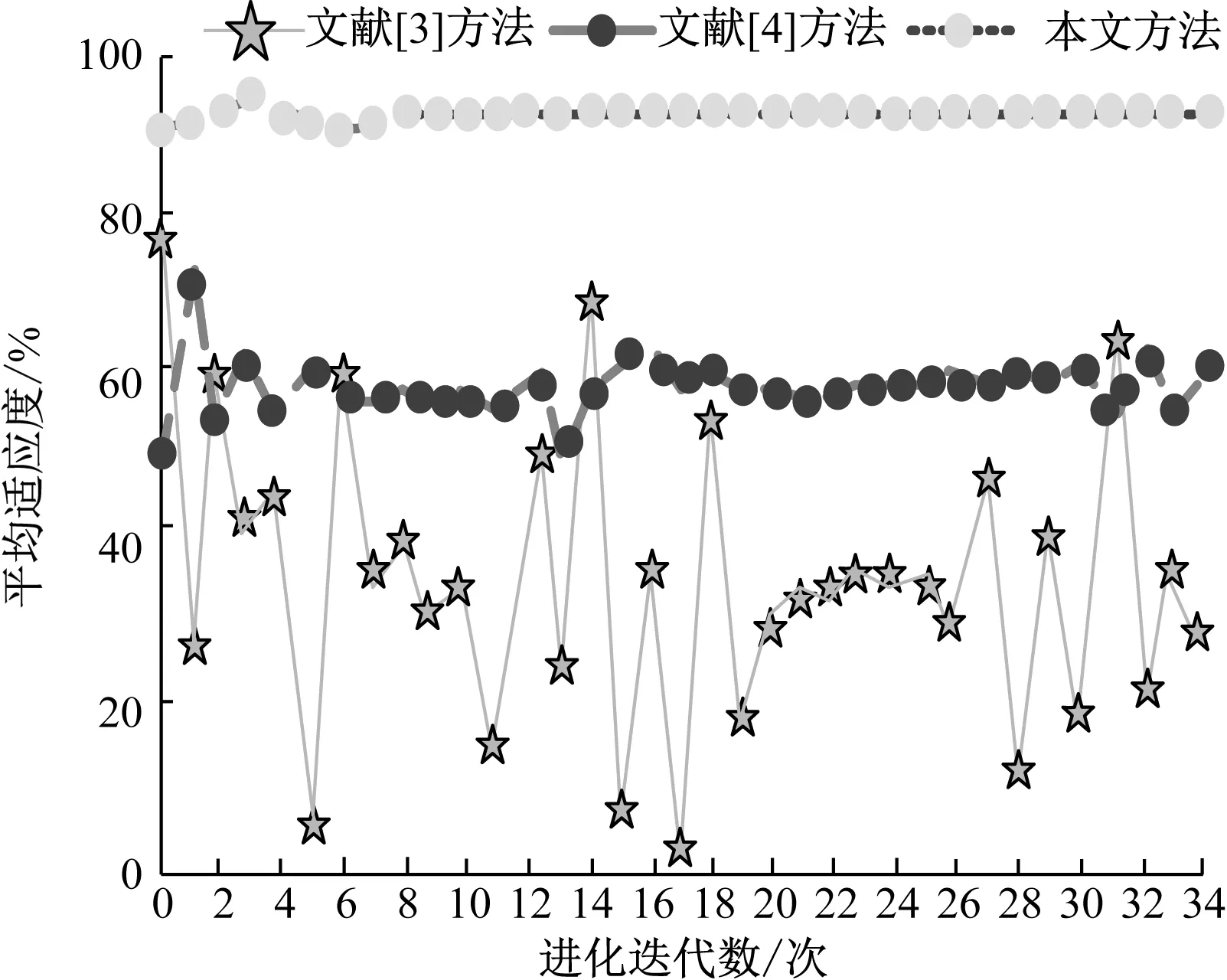
图6 平均适应度变化
从图6可以看出:本文方法在迭代8次时就达到收敛;当迭代次数达到14次时,文献[4]方法才能开始收敛;文献[3]方法一直处于波动状态,没有收敛意向。这说明本文方法收敛速度方面更胜一筹。因此,本文方法在电力设备检测和收敛速度方面表现均为最优。
2.3 检测精度分析
为了验证本文方法对电力设备检测精度,选取不同天气,对比迭代次数不断变化的情况下电力设备检测的损失值,损失值越小,表示用于电力设备检测的网络收敛度越高,检测精确度越好。具体对比结果如图7所示。
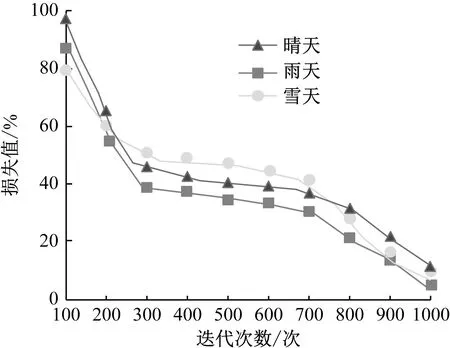
图7 不同天气下的检测精度比较
从图7可以看出,本文方法受环境影响较小,用于电力设备检测的网络收敛程度较高,对电力设备检测的精度较高,能为电力设备管理者提供更准确的电力设备检测效果。
2.4 噪声环境影响分析
实验统计不同噪声环境下的电力设备测试结果,具体如图8所示。

图8 不同噪声环境下的测试结果
从图8可以看出,在无噪声情况和0.2噪声情况下,本文方法均可取得较好测试效果,在噪声0.3环境下,测试结果虽存在些许波动,但依旧可以较好地抑制噪声,证明本文方法在高噪声情况下,仍然能够对电力设备进行有效检测。
3 总结
本文提出了基于AI视觉技术的电力设备检测方法,该方法打破了传统方法对于电力设备无法实现设备图像清晰、检测准确的方式,并且在很大程度上提高了电力设备的检测状况,为电力设备管理者提供了便利。经实验验证,该方法对电力设备进行检测时,不仅操作简单、图像清晰度高、受环境影响小,且该方法具有较强的检测精度。
由于AI视觉技术在电力设备检测的应用刚刚起步,如何在此基础上结合具体应用从多角度、多方位丰富检测方法,解决因检测效果不理想影响电力设备正常使用的问题,值得进一步研究。
猜你喜欢
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化·中考版(2021年3期)2021-07-22
新世纪智能(数学备考)(2020年9期)2021-01-04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
江苏安全生产(2020年7期)2020-09-04
电子制作(2019年19期)2019-11-23
现代工业经济和信息化(2016年22期)2016-08-23
电测与仪表(2016年18期)2016-04-11
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
