
基于峰值自寻的多目标检测前跟踪算法
2023-10-11 13:31薄钧天于洪波张翔宇涂国勇禄晓飞
系统工程与电子技术 2023年10期
薄钧天, 于洪波, 张翔宇, 涂国勇, 禄晓飞
(1. 海军航空大学航空作战勤务学院, 山东 烟台 264001;2. 海军航空大学青岛校区航空电子工程与指挥系, 山东 青岛 266041;3. 中北大学信息与通信工程学院, 山西 太原 030023;4. 中国酒泉卫星发射中心, 甘肃 兰州 732750)
0 引 言
隐身化[1]是军事武器尤其是空中军事平台发展的重要方向,战斗机、轰炸机等通过设计特殊外形,采用特质材料等方式降低其自身的雷达散射截面积(radar cross section,RCS)和回波能量,成为相对雷达等传感器的微弱目标,给现有防御体系带来严重挑战。同时,受作战环境和平台的实时姿态影响,在多微弱目标并存情况下,目标间也极可能出现较大的回波能量差异,使得弱目标被强目标淹没[2]。因此,有效地检测并存目标是亟待解决的重要问题。
传统的检测方式通过对单帧回波量测设置门限,然后提取峰值,但这种方式难以有效检测微弱目标。检测前跟踪(track before detect,TBD)技术是一种广泛应用于检测微弱目标的方法,通过处理多帧回波数据[3],提高真实目标航迹的整体峰值,以此克服低信杂比条件下无法有效检测微弱目标的问题。现有的检测前跟踪方法主要包括基于Hough变换(Hough transform, HT)的TBD(HT-TBD)方法[4-5],动态规划TBD(dynamic programming TBD,DP-TBD)方法[6-7]和基于粒子滤波的TBD(particle filtering TBD,PF-TBD)方法[8-9]等。其中,Carlson等[10-12]将用于图像直线检测的HT应用到TBD方法中形成HT-TBD方法,能够有效完成非相参积累,实现目标检测。
现有的衍生HT-TBD算法均是在Carlson等[10-12]的基础上进行优化得到的。文献[13]通过进行HT在参数空间中的积累,设置门限提取峰值,回溯目标航迹,根据目标飞行先验信息进行航迹修正,得到最终输出航迹。文献[14]采用量测点多种信息,优化积累峰值,更加精确地检测出真实航迹。但是,这些HT-TBD方法存在几个伴随其自身的问题:首先,该类方法在参数空间采用能量积累和二值积累,当存在多个目标且回波能量相差较大时,对能量积累结果设置门限提取峰值将会把低能量目标航迹滤除。二值积累是解决不同回波能量目标航迹的好方法,但在密集杂波情况下,将检测出大量虚假航迹。因此,现有的HT-TBD方法对多微弱目标的航迹起始问题效果不佳。文献[15]提出了一种针对高超声速目标的强弱目标同时检测方法,对回波能量不同的高超声速多目标检测问题具有较好的效果,但该方法是以高超声速目标目前还无法实现编队飞行为前提条件。当面对一般编队目标时,将发生目标间串扰,需要进行改进,使算法在面对编队目标时也能够完成有效的检测。平行线坐标变换(parallel line coordinate transformation,PT)[16]是一种新的投影变换,目前已有文献将其作为Hough变换的替代者应用到图像直线检测[17]和雷达目标检测中[18],并发现其在检测概率和运算时间上具有明显优势。因此,将平行线坐标变换应用到雷达目标检测中是一个有益的尝试。
针对上述讨论,本文提出一种峰值自寻的PT-TBD(peak self-searching parallel line coordinate transformation TBD,PSSPT-TBD)算法。通过对量测点采用平行线坐标变换完成点到线的变换,随后使每个量测点寻找到不同时刻量测点能量和最大的单元,再从改进后的二值积累结果中找出多个目标且删除大量航迹。仿真结果显示,PSSPT-TBD算法能够对平面中多区域多态势目标进行准确检测,有效实现并存目标同时检测的问题。
1 问题描述
以雷达位置作为二维平面的原点,雷达扫描周期为T。量测为点目标量测,则k时刻量测点i的状态向量[19]为
(1)

(2)

(3)

(4)

(5)
式中:H表示量测矩阵,为单位矩阵;Wk=[wR,wΦ,wE]表示量测噪声矩阵,且wR、wΦ和wE均服从均值为0的高斯分布。
2 算法原理
2.1 算法简介
PSSPT-TBD算法主要解决现有基于投影变换的TBD算法存在的两个问题: ① 无法同时检测不同回波能量的目标;② 在密集杂波情况下产生大量虚假航迹。
具体流程为先采用基于平行线坐标变换的传统TBD方式进行能量积累和二值积累,后通过峰值自寻方式改进积累结果。
2.2 非相参积累
多个目标相互之间回波能量相差较大导致各自航迹能量的差异明显,传统TBD方法中的不对积累结果处理而直接设置门限提取峰值的方式极有可能将回波能量低的目标漏检。
设总积累帧数为M,首先采用径向距离-时间维度对量测点迹进行描述,且需要对维度进行规格化处理[21]。因为如果不进行规格化处理,时间量测值数量级远小于径向距离数量级,将导致时间量测信息无法充分体现。

(6)
(7)
式中:[·]为对括号内数进行向上求整运算;Rmax表示量测点到雷达的最远径向距离。这样做是因为后续将进行平行线坐标变换[16],方式如下:
(8)
式中:
(9)

(10)
(11)
参数单元(α,β)满足式(10)时,按式(11)进行带值累加。
(12)
式中:
(13)
式(12)表示元胞数组新存入量测点信息。
2.3 峰值自寻
实际上,真实目标量测点只应属于一条航迹,即只在一个参数单元内起作用[22]。对于每个量测点,首先记录其所通过的所有参数单元[23],初始情况下每个量测点都会经过Nθ个参数单元。依次观察量测点标签矩阵中的参数单元,两两对比参数单元内相同时刻最大能量量测点的能量和,将量测点保存在能量和高的参数单元内。遍历结束之后,该量测点便只保存在和其他时刻能量最大量测点构成最大能量和的单元内。整个过程为一个二重循环,具体步骤如下。
步骤 1设置量测点索引指针p用于后续步骤遍历平面量测点,令p=1。
步骤 2遍历量测点p经平行线坐标变换为直线后穿过的参数单元,设置参数单元索引指针j,令j=1。

(14)
则时刻矩阵为
κlj=unique({k|k=k1,k2,k3,…,km且k≠kp})
(15)
式中:unique(·)函数表示删除矩阵中重复元素。
步骤 4找出时刻矩阵κlj内所有时刻在该单元内能量值最大的点,并将这些点的能量值进行求和:
(16)
式中:Εk表示该单元内k时刻量测点组成的能量矩阵。
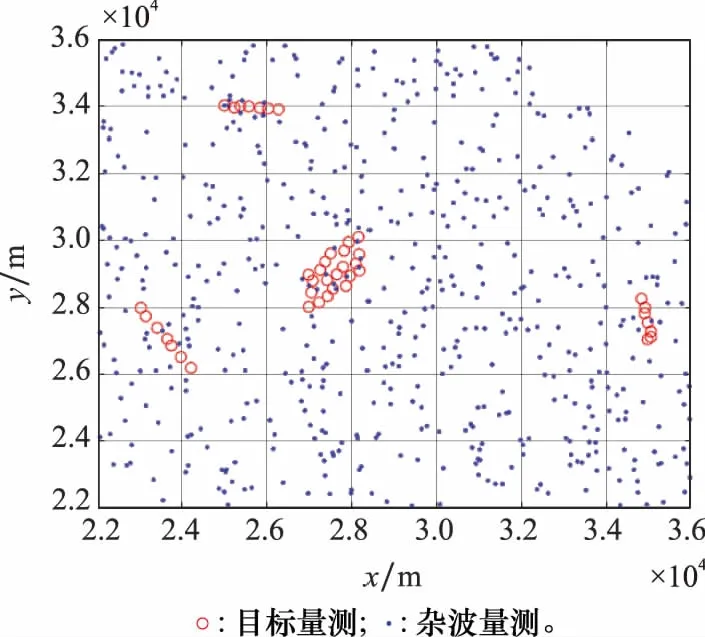
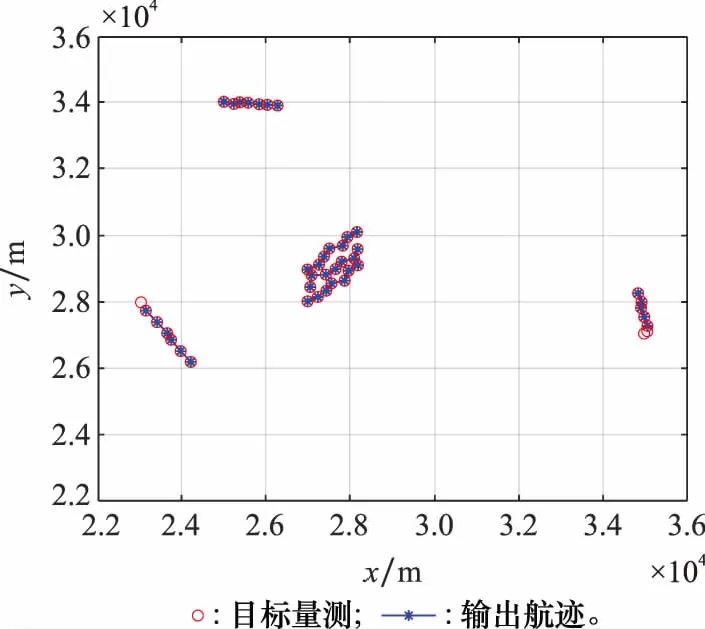
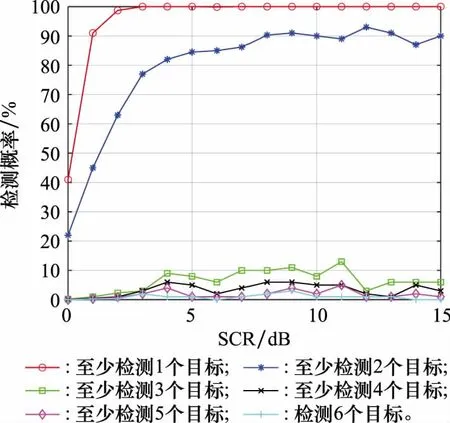
步骤 5当j 步骤 6执行到这一步时,就求出了量测点p遍历的所有参数空间单元内可组成航迹量测点的最高能量和,设立能量和矩阵Wp如下: (17) 步骤 7遍历量测点存在的所有参数单元,找出能量最大的参数单元并保留该量测点,在其他单元删除该量测点,并对相应的参数单元二值积累和能量积累进行相应带值相减: (18) 与文献[15]方法不同,这里允许同单元保留同一时刻不同能量值的量测点。这样虽然会带来一定的计算量,但能够保证编队目标不串扰。 (19) (20) 式中:U(·)表示对参数单元相同时刻量测点二值积累值计为1后的累加运算。 步骤 9当p 下面进行举例说明。 设量测点Zi回波能量为9,来自第4时刻的量测点,其在参数空间中曲线通过的参数单元(α1,β1)和参数单元(α2,β2)内均包括10个量测点,每个参数单元包含的量测点信息如表1所示。 表1 参数单元包含的量测点信息Table 1 Measurement point information contained in the parameter unit 对于参数单元(α1,β1),提取与量测点Zi时刻不同且在各自时刻能量最大的量测点Za1、Za2、Za6、Za7、Za8和Za9。对于参数单元(α2,β2),提取与量测点Zi时刻不同且在各自时刻能量最大的量测点Zb1、Zb3、Zb7、Zb8、Zb9、Zb10。将两个单元提取出的量测点能量和进行对比计算得 Ea1+Ea2+Ea6+Ea7+Ea8+Ea9> (21) 将量测点Zi保留在参数单元(α1,β1)内,将参数单元(α2,β2)中的量测点Zi删除。注意,参数单元(α1,β1)内量测点Za5的回波能量虽然大于当前量测点Zi,但在进行遍历量测点Zi循环内不予以考虑。 则新二值积累矩阵Bp(α,β)和改进后相应参数单元内量测点为 (22) (23) 根据物体运动规律和条件限制,设置目标飞行最大速度vmax、最小速度vmin、最大加速度amax以及最大转向角φmax对航迹进行约束[24-26]。设时刻ka (24) 雷达基础参数为扫描周期T=1 s,发射机功率Pt=25 kW,天线方向性增益G=8,发射电磁波频率为5 GHz,测距误差为10 m,测角误差为0.1°。扫描帧数设为N=7帧,每帧杂波密度服从参数为γ=90的泊松分布,在平面内均匀分布,范围内整体SCR为10 dB。设x-y笛卡尔平面内存在6个目标,其中3个目标为相互间距离较远的单个目标,另外3个目标为具有相同速度的编队目标,目标参数如表2所示。雷达接收量测点二维平面分布图如图1所示。 表2 仿真目标的参数Table 2 Parameters of the simulation target 图1 x-y二维平面雷达量测图Fig.1 x-y two-dimensional planar radar measurement map 图2 r-t二维平面雷达量测图Fig.2 r-t two-dimensional planar radar measurement map 从图2中可以清晰地看出,目标量测点径向距离存在差异,这也会造成它们的回波能量有所差别,且有3个目标径向距离在各时刻均保持相近,说明它们对应的是编队目标。进行二值和能量的非相参积累,得到的结果如图3所示。 图3 积累结果图Fig.3 Accumulation result map 由图3可以发现,在二值积累平面与能量积累平面中θ轴的积累区域两边均存在大量较高峰值。而这些峰值并不代表真实航迹,且真实目标航迹的积累峰值低于上述峰值。在这种积累方式之后设置门限,真实航迹将被淹没。对每个量测点在参数单元中经过的参数单元进行加标签标记,遍历每个量测点通过的参数单元,将每个量测点存入能够和其他时刻最大能量量测点构成最大和能量的参数单元内。建立新二值积累矩阵和新存点元胞数组,新二值积累结果如图4所示。 图4 改进的二值积累结果Fig.4 Improved binary accumulation result 二值积累的好处是,不考虑目标回波能量,不会出现高回波能量航迹淹没低回波能量航迹的现象。在二值积累结果中设立门限τ: τ=0.8maxBp (25) 提取峰值后进行航迹回溯,并设目标飞行最大速度vmax为2、最小速度为0.5、最大加速度amax为5 m/s2以及最大转向角φmax为100°,得到的检测结果如图5所示。 图5 检测结果图Fig.5 Test result map PSSPT-TBD算法需用于同时有效地检测多个目标,因此将通过不同目标的检测概率[27]、不同目标数目的检测概率[28]和算法运行时间[29]来说明算法的有效性。 目标的检测概率主要与其自身信杂比有关,在不同全局信杂比条件下观察算法检测出的目标数目的情况。本文积累M帧回波数据,认为一条真实航迹有ζ个量测点与检测的其中一条航迹重合时,该航迹起始成功。其中, ζ=0.7M (26) (27) 得到在第3.1节所设参数环境下第i条航迹的检测概率为 (28) 由此得到不同回波能量目标航迹的检测概率。 同时,可以计算算法在一次检测中至少检测到目标数的概率,设第j次仿真实验中检测到的航迹个数为 (29) 对第j次实验能否至少检测到X个目标,设立判决系数 (30) 则算法至少检测到X个目标的检测概率为 (31) 画出运算后在第3.1节参数设置条件下不同回波能量量测点的检测概率随信杂比变化的情况如图6所示。 图6 PSSPT-TBD算法对不同目标的检测概率图Fig.6 Detection probability map of the PSSPT-TBD algorithm for different targets 从图6可以看出,所有目标的检测概率均随SCR的升高而升高,且最后趋于稳定。其中,目标2的检测概率在全局SCR达到3 dB时就可以达到90%之上,为起始效果最好的目标。目标6的检测概率在全局SCR高于8 dB时才达到90%之上,为起始效果相对较差的目标。由图6可以看出,PSSPT-TBD算法非常有效地解决了不同回波能量目标无法同时有效起始的问题,且效果极好。 算法至少检测到的目标数目随SCR的变化图,如图7所示。 图7 PSSPT-TBD算法对不同目标数目的检测概率图Fig.7 Detection probability map of the PSSPT-TBD algorithm for different target numbers 从图7可以看出,在相同全局SCR下,算法对不同个数目标的检测概率随目标数上升而下降。但当全局SCR高于8 dB时,全部目标航迹起始的成功率也达到了90%以上,说明PSSPT-TBD算法对于检测不同回波能量的目标具有较好的性能。考虑到不同目标的回波能量可能差距较大,因此PSSPT-TBD算法具有较强的适用性。 将PSSPT-TBD算法与文献[10-12]、文献[13]所提算法进行对比,文献[10-12]和文献[13]所提两个算法在第3.1节参数设置下的检测结果图分别如图8和图9所示。 图8 文献[10-12]算法检测结果图Fig.8 Detection result of the algorithm in[10-12] 图9 文献[13]算法检测结果图Fig.9 Detection result of the algorithm in [13] 由图8和图9可知,文献[10-12]方法不仅无法将真实目标航迹有效起始,还会造成大量虚假航迹,而文献[13]方法则会造成多个低回波能量目标航迹漏检。文献[10-12]算法是最基本的HT-TBD算法,其效果最差。在此只计算文献[13]算法对各目标检测概率以及至少检测目标数目的概率,结果如图10和图11所示。 图10 文献[13]算法不同目标检测概率图Fig.10 Detection probability map of the algorithm in [13] for different targets 图11 文献[13]算法对不同目标数目检测概率图Fig.11 Detection probability map of the algorithm in [13] for different target numbers 相比上述两种方法,本文算法不仅具有较高的全局检测概率,还不会引入过多的虚假航迹。 由于仿真显示文献[10-12]算法虚假航迹过多,文献[13]算法不具备检测多回波能量不同目标的能力,因此本文不讨论上述两种算法在不同SCR下的检测概率。在第3.1节参数设置条件下,改变每帧杂波数,计算3种算法的运行时间,如表3所示。由表3可知,相对于文献[10-12]算法和文献[13]算法,PSSPT-TBD算法由于引入峰值自寻过程,计算量要高于文献[10-12]算法,且略高于文献[13]算法。文献[10-12]算法在积累之后,只是简单地设置门限进行提取,未进行任何改进,计算量相对较小。而文献[13]算法需要处理较多的虚假航迹,也有较大计算量。PSSPT-TBD算法虽然也需要处理虚假航迹,但在经过峰值自寻形成新二值积累结果后需要处理的虚假航迹不多,因此计算量主要来自于峰值自寻。 表3 不同杂波密度下3种算法的检测时间Table3 The running time of the three algorithms under different clutter densities 基于投影变换的检测前跟踪算法是目前较为有效的航迹起始方法,但其在面对密集杂波和多目标回波能量差异较大的情况时无法有效同时起始多条航迹。本文提出一种PSSPT-TBD算法,参考参数单元内不同时刻量测点的最大能量值,使之求和并比较,令每个量测点找到其属于的最大能量积累单元,达到峰值自寻的目的。再采用二指积累的方式建立新的矩阵,从而不引入能量信息。仿真结果显示,在全局SCR在8 dB以上时,PSSPT-TBD算法能够以90%以上的检测概率起始全部航迹,说明算法十分有效。但是,PSSPT-TBD算法仍属于通过非相参积累提高目标信杂比的方式,当目标量测点SCR低于0 dB时,目前基于投影变换的TBD方法以及本文在此基础上所提的多目标检测方法将无法与相参积累方法[30-31]相比。

Eb1+Eb3+Eb7+Eb8+Eb9+Eb102.4 航迹约束
3 仿真验证与对比分析
3.1 算法仿真




3.2 对比分析







4 结 论
猜你喜欢
机械设计与制造(2023年2期)2023-02-27黑龙江大学自然科学学报(2021年4期)2021-11-19汽车实用技术(2021年10期)2021-06-04高技术通讯(2021年2期)2021-04-13青年歌声(2019年12期)2019-12-17测控技术(2018年10期)2018-11-25北京航空航天大学学报(2017年7期)2017-11-24计算机应用(2016年10期)2017-05-12北京航空航天大学学报(2016年6期)2016-11-16舰船科学技术(2015年8期)2015-02-27
