两种典型情况下的多目标航迹关联方法
2023-10-10 01:57刘利军邹卫科蔡新田
测控技术 2023年9期
刘利军, 邹卫科, 李 曦, 蔡新田
(中国人民解放军63620部队,甘肃 酒泉 732750)
在飞行器突防试验中,为了掩护真正的攻击目标,飞行中段一批诱饵、干扰等突防装置和分离时产生的碎片会裹挟着弹头形成一个目标群[1]。这一群目标不仅数量多、空域分布范围小,相对位置也在不断变化,加上目标回波测量信号的起伏和相互干扰,对于分辨力和测量精度不高的雷达,目标跟踪的连续性和稳定性难以得到保证,经常会出现时跟时丢和目标交错、重复跟踪的现象,严重影响到多目标雷达的测量效果和获取数据的质量。因此,面对突防导弹,首先需要解决的就是多目标测量雷达的航迹关联问题。航迹关联主要解决不同航迹是否源于同一目标的问题,是进行弹道融合的基础和关键[2]。航迹关联的准确度不仅为导弹突防效果的评估提供了重要依据,还使弹头识别和动能拦截成为可能。
国内外学者对多目标测量雷达航迹关联的理论和方法进行了大量研究。国外在相控阵雷达多目标数据处理的实践应用过程中产生了概率数据关联(Probabilistic Data Association,PDA)、联合概率数据关联(Joint Probabilistic Data Association,JPDA)等航迹关联算法,成为雷达工程实践的经典。国内著名学者何友教授提出了在空间融合的同时引入时间融合的思想,由此产生了序贯法、双门限等方法,基于以上统计假设检验,何友教授又将模糊模式识别的思想引入航迹关联问题,并将影响航迹关联结果的因素进行分类,产生了一系列模糊类航迹关联算法,如模糊双门限法、模糊综合函数法、多因素模糊综合决策法,这些算法已被工业部门用于现代多目标跟踪测量雷达的航迹关联设计中[3-5]。
仿真和工程实践表明,目前所提出的航迹关联算法还不能完全解决多目标测量雷达航迹关联中的目标变换和目标重复两类典型问题[6-7],在数据处理中依赖人工进行飞行轨迹拼接完成多目标航迹的重新分段和去重复,存在费时费力、容易出错的缺点,直接影响导弹突防效果分析评估的速度和可靠性。
1 航迹关联典型问题剖析
近年来一批相控阵多目标测量雷达逐渐投入飞行器测量应用中,可同时捕获数十个以上的空间目标并能完成稳定跟踪,但当前多目标测量雷达普遍存在一段航迹目标发生变换、多段航迹目标重复跟踪的典型现象,简称为目标变换与目标重复。为解决这两种典型情况下的多目标航迹准确关联的问题,需要对两种现象的运动特性进行分析。
1.1 目标变换问题
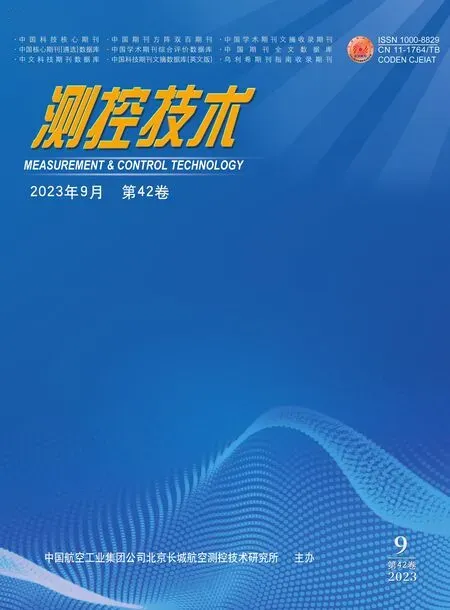
一段航迹目标发生变换指雷达接收机某通道测量的空间目标不唯一,在跟踪过程中目标发生了变换,一段连续航迹对应着多个目标,目标之间交错跟踪,雷达获取测量数据的有效性较差。多目标雷达在航迹发生目标变换时的测距原始数据曲线如图1所示。
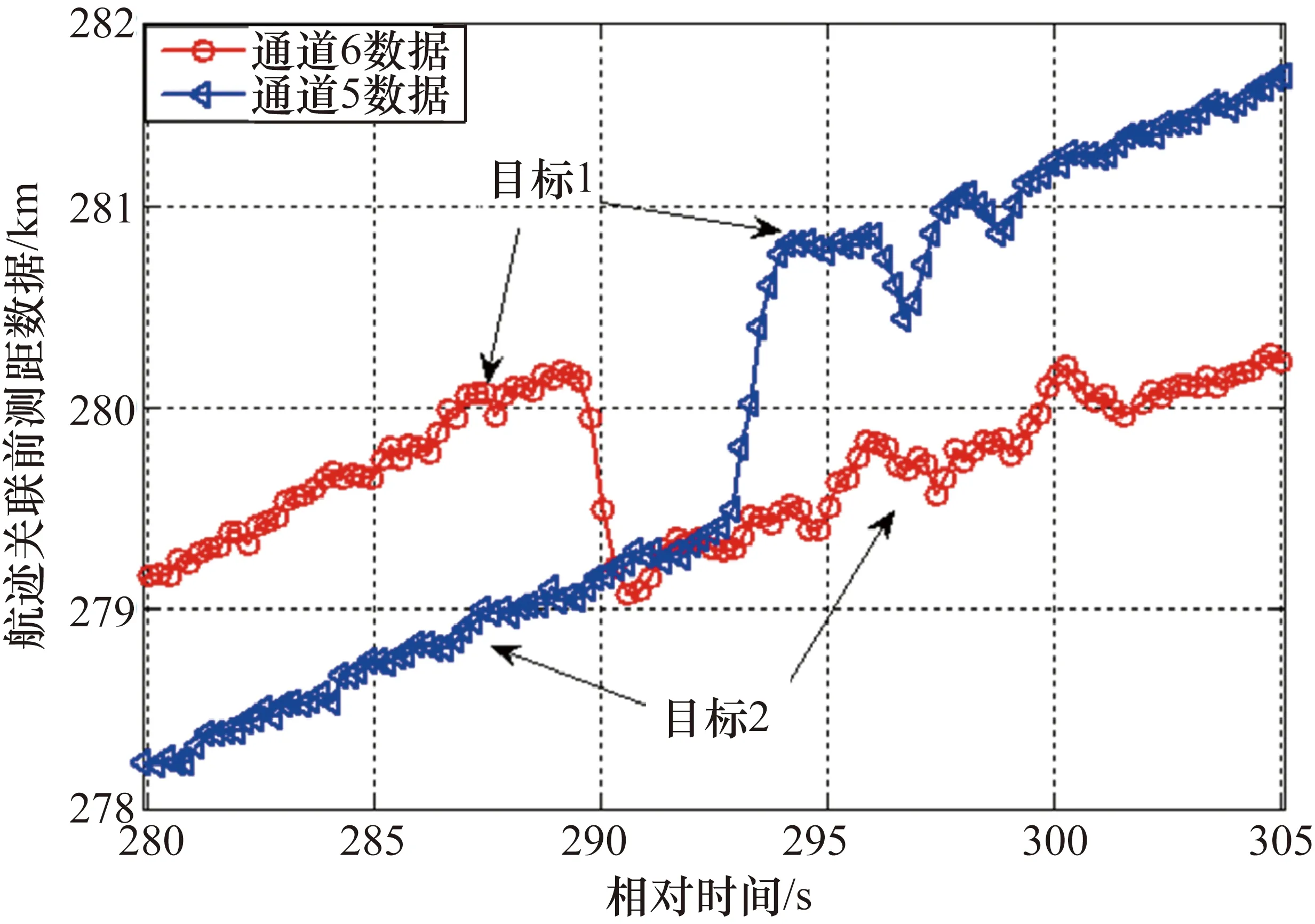
图1 雷达同一通道/批号目标变换示意图
图1中雷达的通道5、通道6起始跟踪对象分别为目标2和目标1,在相对时约(t+9)~(t+13) s之间,两段航迹跟踪目标发生了交错,通道5跟踪目标变换为目标1,通道6则开始跟踪目标2。
发生这种情况典型的物理背景是:① 雷达主通道未能有效跟踪技术方案中规定的目标,操作人员主动调整雷达接收机使通道重新分配或目标重新起批后,原先通道跟踪的目标发生了变换;② 当目标释放突防装置或目标发生分离时,多个目标空间距离相距较近,受雷达距离分辨率限制,把多个目标作为一个组合体进行跟踪,当目标分离径向距离大于雷达分辨率时,目标回波信号相互干扰,导致跟踪目标发生切换。
实践证明,当这两种物理背景发生时,雷达测距或测角数据会发生如图1所示的“台阶跳”现象,当跟踪远距离目标时,由于雷达测距数据精度较高且不随目标运动产生传播误差,发生目标变换时数据“台阶跳”最为明显,因此测距数据可作为判断雷达某段航迹发生目标变换的主要依据。值得注意的是:当多个空间目标距雷达测站的距离矢量恰好相等或目标航迹发生交叉时,会导致测距数据变化不明显,此时应通过分析雷达测角数据的跳变情况判断是否发生了目标变换。
1.2 目标重复问题
多段航迹目标重复跟踪指在一次试验任务中同一目标被单台雷达多次测量,目标重复起批,跟踪测量的效率较低。多目标雷达重复跟踪情况如图2所示。

图2 雷达多目标重复跟踪示意图
图2中,雷达批号118、164测量数据均跟踪目标1,且批号164测量数据为批号118测量数据的子集;批号113、142、143测量数据虽无重合时间段,但通过对3段航迹进行综合研判后认为是同一目标;批号002、185、186测量数据经事后分析均为目标3。目标重复跟踪这种情况典型的物理背景可能为:① 设备人员手动调整雷达参数使通道重新分配或目标重新起批,跟踪目标与设备通道/批号对应关系发生了变化;② 空间目标较复杂,雷达实时航迹关联算法存在缺陷或设备持续跟踪性能较差,导致对同一目标进行了多次重复跟踪。
对于同一目标重复跟踪问题,如果雷达多个通道测量数据文件存在重合时间,且时间段较长,可通过直接比较雷达各文件的R、E、A测元确定是否为同一目标。如重合时间较短或无重合时间,则需根据弹道动力学模型进行数据外推来判断是否为同一目标[8]。
可见,多目标测量雷达出现连续航迹目标变换、多段航迹目标重复两类典型航迹关联问题的根源是历史信息与当前状态出现矛盾的结果。在进行事后航迹关联处理时,可通过分析雷达目标变换时测量数据中的异常值和对多个通道的测元数据作差比较进行多目标航迹的再次关联,最终解决目标变换和目标重复两类典型问题,从而提高多目标雷达的测量效率和航迹关联的准确度。
2 航迹关联算法及应用
针对多目标雷达航迹关联中的两类典型问题,首先需要解决一段连续航迹中的目标变换问题,即实现单文件中航迹目标的唯一化,使一段连续跟踪测量数据文件只对应唯一的空间目标。其次解决多段航迹中的目标重复跟踪问题,即同一个目标在单次试验任务中被雷达多次测量的问题。最终改变目前以雷达通道作为数据处理单元的现状,将空间不同的多个目标重新编号,形成单个测量文件对应单一目标的数据单元。
2.1 目标变换识别算法及应用
美籍华人学者周宏仁教授认为:目标在空间运动时,下一时刻的加速度取值是有限的,其运动范围只能在当前位置的邻域内,目标在空间运动的航迹和方向不会发生突变[9-10]。当雷达持续跟踪的目标发生变换时,由于测距、测角数据会出现明显的“台阶跳”现象,因此对于同一通道的跟踪测量数据,关键在于区分哪些数据是测量中的野值点,哪些数据是由于目标变换造成的。野值点只需对其进行校正即可,而对由于目标变换造成的“连续野值点”,则需要确定目标变换的过渡时间段,最后根据目标个数对该航迹数据进行重新分段。
针对多目标测量雷达一段连续跟踪航迹中发生目标变换的典型问题,本文提出双向带密度控制的多项式拟合外推方法,不仅对孤立型野值和斑点型野值数据有较好的检验校正效果,而且通过对发生目标变换可疑测量数据段同时进行前向、后向拟合捡择,可以有效判断出一段连续跟踪航迹中的目标变换时刻。
设雷达观测数据序列为:{ti,xi},(i=1,2,…,N),其中ti为雷达第i点观测时间,xi为第i点观测数据,且1≤i≤N,N为雷达观测总点数。假定外推拟合点数为n,正确基点数为n1,密度控制常数为k1、k2,主要算法流程如下。
① 门限设定。用拟合多项式对测量数据进行分段拟合并统计随机误差,若误差在雷达测元精度指标σ之内,则令外推判决门限为εx=3σ,否则令εx=6σ。
② 基点选取。选取雷达当前观测点数j=n,令j=j+1,当首次出现连续n1点满足拟合残差|Δxj|≤εx时,记好数据段首点序号:J1=j-(n+n1)+1。
③ 数据判决。令j=j+1,若残差|Δxj|≤εx成立则转步骤①,否则转下一步。

⑤ 插值校正。若j>N,则进行插值校正,根据可疑点所处的位置,可进行前插、后插和内插校正计算。在插值校正时,判断|Δxj|≤εx是否成立,如成立则不替代(校正),否则才进行替代(认为是野值或目标切换点)。
⑥ 目标判断。在内插校正时,同时采用前插、后插多项式对可疑段数据进行插值,若两拟合曲线的交点落在可疑段内,则认为可疑数据仅是航迹的转折或野值点,对其进行内插校正;否则为台阶跳,可判其为目标变换点,作标识后将该段航迹数据依据目标重新分段。
双向带密度控制的多项式拟合外推方法引入了数据质量评估和密度控制机制。首先对测量数据进行分段误差统计,根据测元质量和雷达测量精度指标确定数据合理性检验门限。其次,如果进行数据替代时点数过密则将整个替代段标识为可疑,在后续插值校正时再确定是否进行替代。最后,对可疑数据段采用同时前向、后向拟合插值的方法确定可疑段数据是野值点还是发生了目标变换。如发生了目标变换,则将该段航迹分为两个独立的目标文件;如为野值点,则通过整体拟合多项式进行数据内插替代。该方法在多次试验中取得了很好的应用效果,雷达航迹异常数据捡择情况如图3所示。
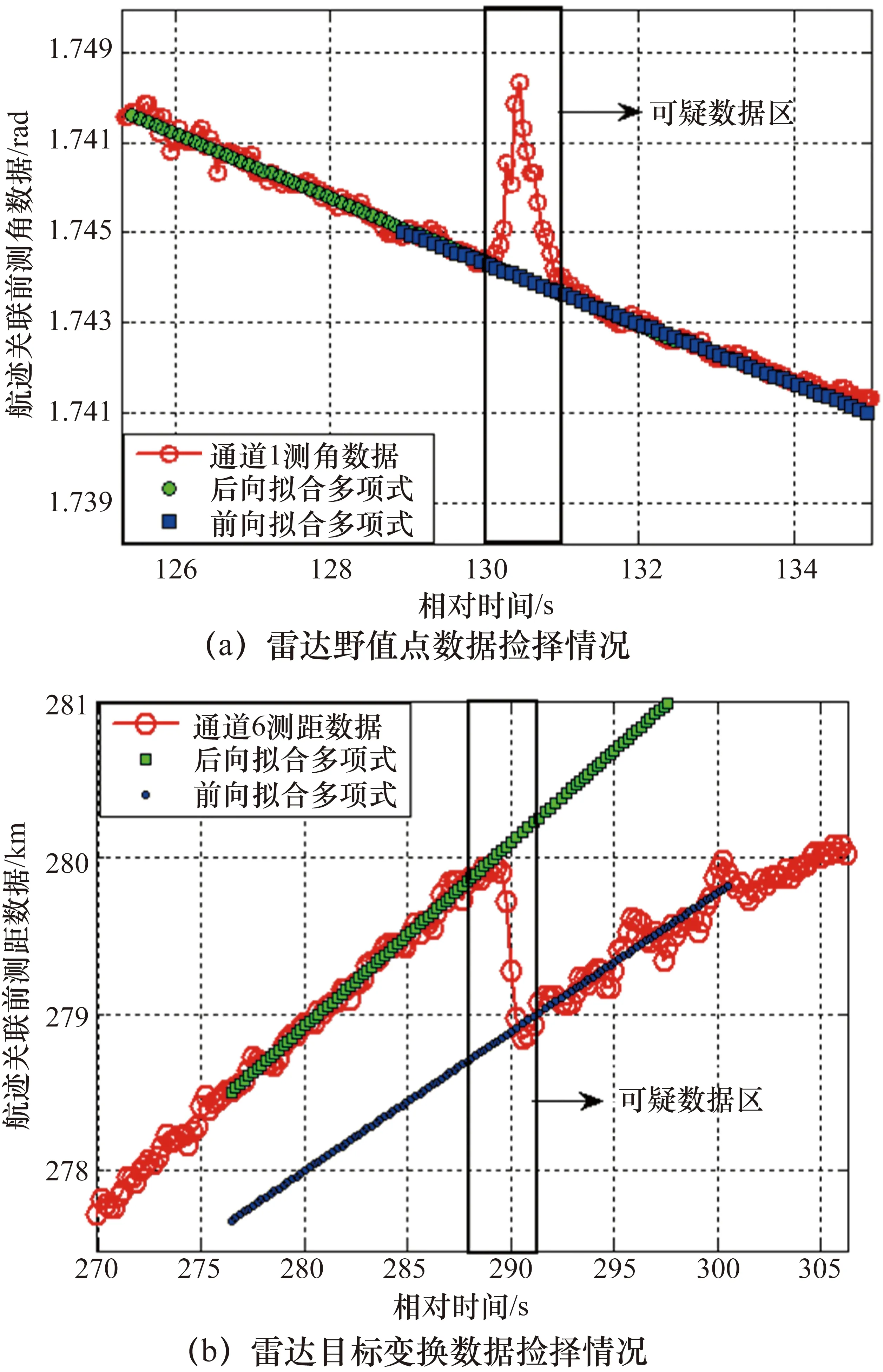
图3 雷达航迹异常数据捡择情况
图3(a)为雷达通道1测角数据捡择情况,在相对时约(t+3)~(t+5)s内方位角数据异常值较多,该 段数据经多项式拟合外推,超出测元判决门限且替代点数过多,被标为可疑数据段。采用前向、后向多项式同时对该数据进行拟合时,由于目标运动方向没有发生改变,多项式交点在可疑数据段内,该段数据被判为野值点,通过内插方法对其进行替代即可。
图3(b)为雷达通道6测距数据捡择情况,在相对时约(t+9)s时,测距数据捡择出现异常,被标为可疑数据段,由于前向、后向拟合多项式对该段数据外推曲线的交点在可疑数据段之外,判断目标在该数据段发生了变换,将其作标记,待该航迹数据全部捡择完毕后依据航迹内的目标个数重新进行数据分段。
可见,双向带密度控制的多项式拟合外推方法能够有效捡择多目标雷达测量数据中的异常值,并通过对异常区域数据同时进行前向、后向拟合外推可判断数据是测量中的野值点还是发生了目标变换。多次试验验证结果表明该方法快速、有效。
2.2 目标去重复算法及应用
单文件航迹目标唯一化问题解决之后,多文件目标重复跟踪的问题主要通过对雷达各通道/批号数据中的R、E、A测元进行比较来实现,如比较残差在设置门限内可认为是同一目标,对测量数据合并即可;否则即为不同目标,继续进行比较。由于雷达伺服、测距系统的鲁棒效应,一般情况下,长时段跟踪测量的数据稳定性和平滑性较好[11],因此重复目标数据合并的原则为:保留长时段连续跟踪数据,删除短时段重复数据。多目标去重复算法流程如图4所示。
图4 多目标去重复算法流程
如图4所示,按雷达跟踪目标时间长度对多目标文件进行排序和数据加密对齐,将测量时间段最长的文件作为比较文件,其余文件依次作为被比较文件。为保证比较结果可信,如两文件测量数据重合点数大于20点,可直接对R、E、A测元依次进行比较,残差均在设置门限内则认为两文件测量数据为同一目标,可进行目标合并。如两文件数据无重合时间段或重合点数小于20点,则不能直接进行测元比较,必须通过坐标转换,再进行弹道动力学外推反算至雷达测元R、E、A后再进行比较,为确保外推可靠,仅对两文件测量数据间隔30 s内的数据进行外推比较。
在自由飞行段,飞行器仅在地球引力作用下运动,此时弹道外推精度高,因此,对于航迹可能出现中断的情况,采用自由段动力学模型进行弹道外推后确认雷达多通道测量数据是否跟踪同一目标的方法是可行的。下面给出目标自由段动力学模型和外推误差仿真结果。

(1)
引力、牵连、哥氏加速度可表示为
式中:gr、gw分别为引力加速度沿地心矢径、地轴方向的分量;ω为地球自转角速度;r为弹头到地心的距离;rx、ry、rz分别为地心到目标点的矢径在发射坐标系的投影。
龙格库塔是一种在工程上求解常微分方程初值问题的有效方法,4阶龙格库塔法截断误差为0(h5),计算精度较高,需要存储的数据量少,完全能够满足目标弹道外推的精度和实时性要求[14]。
(2)
(3)
(4)
(5)
(6)
由于多目标测量雷达无法直接求解飞行器速度参数,而微分求速误差较大,对外推的准确度有一定影响,因此对微分得到的速度数据经平滑拟合后再进行动力学弹道外推效果较好。图5为采用雷达仿真数据进行自由段动力学外推的误差统计情况。
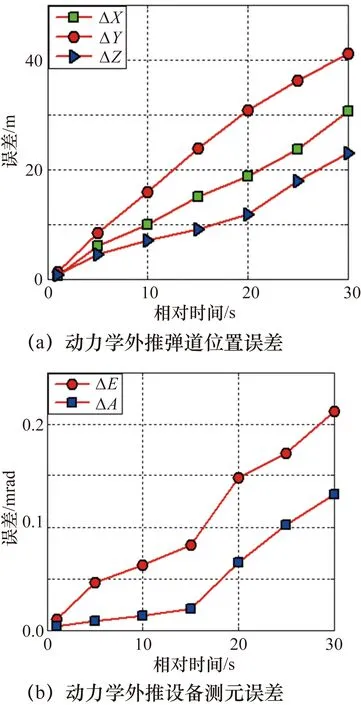
图5 雷达自由段动力学外推弹道及测元误差曲线
由图5可见,由于在自由段时,飞行器弹道外推的主要误差源为雷达测元精度,动力学外推的精度较高,在目标航迹中断30 s内外推后通过反算测元进行误差比较确定是否同一目标的结果真实可信。
图6为对图2中的多目标重复数据采用基于自由段动力学模型外推比较处理的航迹关联后测距数据曲线,去重复处理前雷达共跟踪到8条航迹,处理后仅为3个目标的测量航迹,而且对航迹中断数据采用自由段弹道动力学方法进行了准确预测。该方法有效提高了多目标雷达数据利用率和航迹关联的准确度。
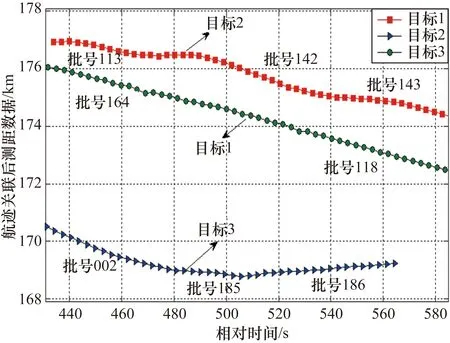
图6 雷达多目标去重复示意图
综上所述,基于自由段动力学外推的测元比较方法不仅可以对测量时间有重合的多目标数据去重复,对于跟踪同一目标但航迹发生中断的数据也可进行航迹拼接,并可对航迹中断时间小于30 s内的测量数据进行准确外推。目标跟踪航迹中断一旦产生,雷达接收机将对目标航迹重新进行编批,会对后续航迹融合产生严重干扰,致使中断前已获取的目标信息在中断后无法使用,这对时效性要求很高的反导作战来说,可能造成致命影响[15-16]。因此,该方法对航迹中断条件下的新、旧航迹快速关联有显著作用。
3 结束语
针对多目标雷达跟踪测量过程中存在的两类典型航迹关联问题,从产生问题的运动特征和物理现象展开研究。首先提出双向带密度控制的多项式合理性检验方法,解决了一段连续航迹中跟踪目标发生变换的难题;其次,通过基于目标动力学弹道外推的测元比较方法解决了雷达多段航迹中目标重复跟踪的难题,改变了完全依赖人工判别进行手动拼接测量数据完成多目标航迹关联的现状,实现了多目标航迹的单一化处理。该算法简单可靠,仿真结果证明两种算法在试验中可实现多目标航迹关联的自动化,有效提高数据处理的周期和准确度,对完成导弹空域分布、目标识别等突防效果分析与评估具有重要意义。
猜你喜欢
电光与控制(2022年4期)2022-04-07
新世纪智能(数学备考)(2021年9期)2021-11-24
青年歌声(2019年12期)2019-12-17
当代陕西(2019年15期)2019-09-02
上海航天(2018年4期)2018-09-07
学苑创造·A版(2018年11期)2018-02-01
北京航空航天大学学报(2017年7期)2017-11-24
兵器装备工程学报(2017年9期)2017-09-28
读者(2017年5期)2017-02-15
电子设计工程(2017年20期)2017-02-10